上银直线电机马达参数下载步骤
- 格式:doc
- 大小:156.00 KB
- 文档页数:2
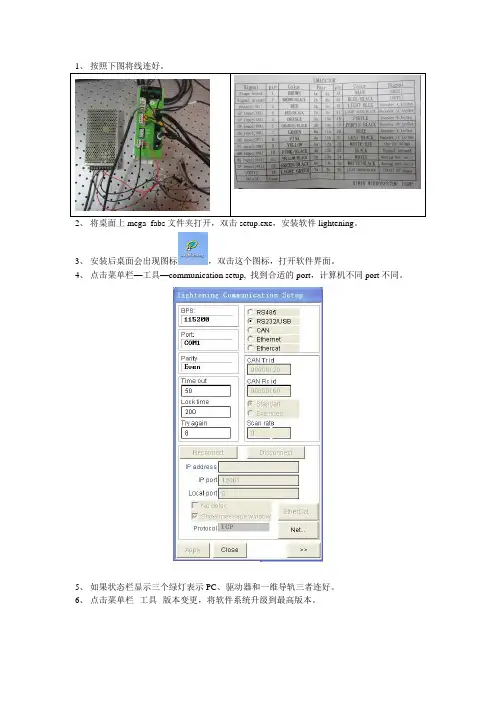
2、 将桌面上mega_fabs 文件夹打开,双击setup.exe ,安装软件lightening 。
3、 安装后桌面会出现图标,双击这个图标,打开软件界面。
4、 点击菜单栏—工具—communication setup, 找到合适的port ,计算机不同port 不同。
5、 如果状态栏显示三个绿灯表示PC 、驱动器和一维导轨三者连好。
6、 点击菜单栏--工具--版本变更,将软件系统升级到最高版本。
7、首先点击菜单栏的语言,将英文改为中文版本。
8、点击设置/调机—设置,选择正确的马达类型,编码器类型,黑尔感测器,操作方式(LMS13,Linear Digital 0.5um enc,无黑尔感测器,单机作业方式)9、打开菜单栏--设置/调机---输入输出设置,设置左右限位和零限位。
10、点击菜单—设置/调机—应用,使能限位作用。
11、点击菜单—设置/调机—自动相位,1、解激磁—激磁,2、定义方向,3、frequency analysis.SM enable-- Run--拉一条线与自动产生的线重合—send。
4,相位初始化。
12、完成上面步骤后,已激磁,相位初始完成,servo ready显示绿灯。
相对运动,寸动和归基点。
15、点击菜单—设置/调机—应用,可以设置回基点速度等等。
误差补偿曲线信号的鲁棒性100mm/s方向为正0~1000mm方向为负1000~0mm200mm/s 正反300mm/s 正反400mm/s反500mm/s反正反正反正反正反正反。

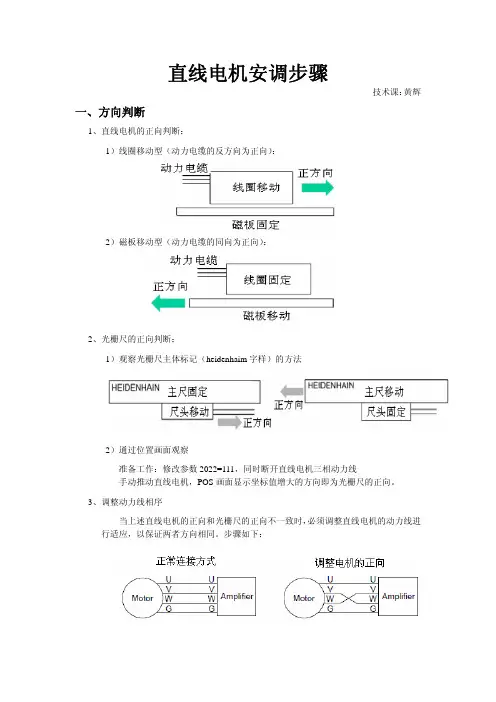
直线电机安调步骤技术课:黄辉一、方向判断1、直线电机的正向判断:1)线圈移动型(动力电缆的反方向为正向):2)磁板移动型(动力电缆的同向为正向):2、光栅尺的正向判断:1)观察光栅尺主体标记(heidenhaim字样)的方法2)通过位置画面观察准备工作:修改参数2022=111,同时断开直线电机三相动力线手动推动直线电机,POS画面显示坐标值增大的方向即为光栅尺的正向。
3、调整动力线相序当上述直线电机的正向和光栅尺的正向不一致时,必须调整直线电机的动力线进行适应,以保证两者方向相同。
步骤如下:二、参数设定:1、设定平台:系统:31i+PANEL i伺服软件版本:90E3直线电机:Lis15000C2/3HV(磁板宽度60mm,水冷)光栅尺:海德汉LC193F(分辨率0.01um),绝对光栅尺系统检测单位:0.1um(1013#1=1:IS-C,可根据实际需要调整设定)2、参数设定步骤:设定步骤(1):电机初始化1)初始化位:P2000#0=12)AMR设定:P2001=03)移动方向:P2022=111/-111(根据实际需要)4)电机代码:P2020=3915)直线电机有效位:P2010#2=1设定步骤(2):伺服参数设定1)速度脉冲数设定:P2023=3125/16/分辨率(um)=19531(可近似取整)2)位置脉冲数设定:P2024=625/分辨率(um)=62500(超出32767)故可设定P2024=6250,P2185=103)忽略a编码器断线报警:P2013#7=14)设定AMR变换系数:P2112和P2138方法一:仅使用P2112的情况(当计算结果为整数时可使用)P2112=磁板长度(mm)/分辨率(um)=6000,P2138=0 方法二:两者均使用的情况(适用于任何情况):磁板长度(mm)×1000/分辨率(um)=P2112×2P2138计算得出:P2112=46875(超出32767),P2138=7故最终设定:P2112=23438(四舍五入),P2138=8 5)设定柔性齿轮比:P2084和P2085FFG=分辨率(um)/检测单位(um)=0.01/0.1=1/10设定步骤(3):磁极位置检测(在进行该步骤前,先保证直线电机可以动作):1)磁极位置检测功能有效:P2213#7=12)AMR偏执有效:P2229#0=13)编写梯形图将G135的对应位强制为1,磁极位置检测开始4)磁极位置检测完成之后,系统自动将偏置参数写入P2139 设定步骤(4):过热参数设定:对于水冷型直线电机,需要修改如下参数(自冷型初始化设定即可)1)OVC报警参数POVC1:P2062=325632)OVC报警参数POVC2:P2063=25573)OVC报警参数POVCLMT:P2065=76014)电流频率参数RTCURR:P2086=20295)停止时OVC倍率OVCSTP:P2161=140设定步骤(5):绝对编码器设定1)绝对编码器有效:P1815#5=12)绝对零点建立:P1815#4=1(需安装具体步骤和实际情况设定)。
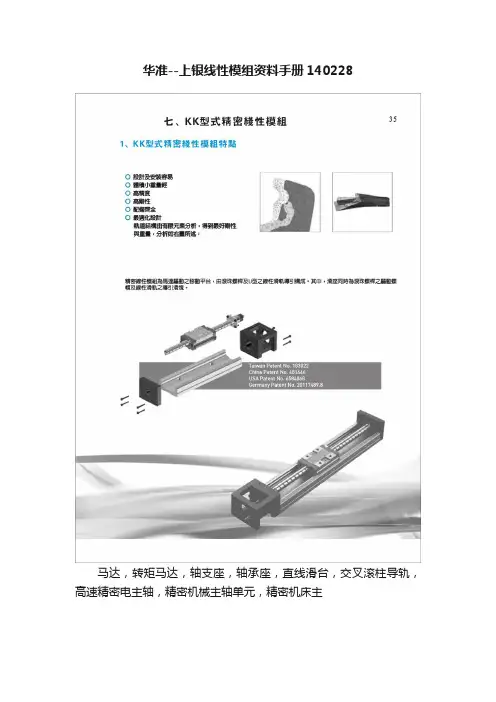
华准--上银线性模组资料手册140228
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主
马达,转矩马达,轴支座,轴承座,直线滑台,交叉滚柱导轨,高速精密电主轴,精密机械主轴单元,精密机床主。


介绍直线电机参数和选型1.最大电压( max. voltage ph-ph) ———最大供电线电压,主要与电机绝缘能力有关;《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
》2.最大推力(Peak Force) ———电机的峰值推力,短时,秒级,取决于电机电磁结构的安全极限能力;《版权声明:本文由整理提供,部分内容来源于网络,如有侵犯到你的权利请与我们联系更正。
》3.最大电流(Peak Current) ———最大工作电流,与最大推力想对应,低于电机的退磁电流;4.最大连续消耗功率(Max. Continuous Power Loss) ———确定温升条件和散热条件下,电机可连续运行的上限发热损耗,反映电机的热设计水准;5.最大速度(Maximum speed) ———在确定供电线电压下的最高运行速度,取决于电机的反电势线数,反映电机电磁设计的结果;6.马达力常数(Motor Force Constant) ———电机的推力电流比,单位N/A或KN/A,反映电机电磁设计的结果,在某种意义上也可以反映电磁设计水平;7.反向电动势(Back EMF) ———电机反电势(系数),单位Vs/m,反映电机电磁设计的结果,影响电机在确定供电电压下的最高运行速度;8.马达常数(Motor Constant) ———电机推力与功耗的平方根的比值,单位N/√W,是电机电磁设计和热设计水平的综合体现;9.磁极节距NN(Magnet Pitch) ————电机次级永磁体的磁极间隔距离,基本不反映电机设计水平,驱动器需据此由反馈系统分辨率解算矢量控制所需的电机电角度;10.绕组电阻/每相(Resistance per phase)———电机的相电阻,下给出的往往是线电阻,即Ph-Ph,与电机发热关系较大,在意义下可以反映电磁设计水平;11.绕组电感/每相(Induction per phase) ———电机的相电感,下给出的往往是线电感,即Ph-Ph,与电机反电势有关系,在意义下可以反映电磁设计水平;12.电气时间常数(Electrical time constant) ———电机电感与电阻的比值,L/R;13.热阻抗(Thermal Resistance) ———与电机的散热能力有关,反映电机的散热设计水平;14.马达引力(Motor Attraction Force) ———平板式有铁心结构直线电机,尤其是永磁式电机,次极永磁体对初级铁心的法向吸引力,高于电机额定推力一个数量级,直接决定采用直线电机的直线运动轴的支撑导轨的承载能力和选型。
直线电机参数
直线电机的参数包括以下几个方面:
1. 功率:直线电机的功率是指其输出的机械功率,单位通常为瓦特(W)。
2. 电流:直线电机的电流是指通过其线圈的电流,单位为安培(A)。
3. 电压:直线电机的电压是指供给其线圈的电压,单位为伏特(V)。
4. 转速:直线电机的转速是指其输出轴的旋转速度,单位为转每分钟(rpm)或转每秒(rad/s)。
5. 载荷:直线电机的载荷是指其所能承受的最大负荷,包括力和扭矩。
6. 效率:直线电机的效率是指其输出功率与输入功率之间的比值,通常以百分数表示。
7. 推力:直线电机的推力是指其输出的力大小,单位通常为牛顿(N)。
8. 运动控制精度:直线电机的运动控制精度是指其输出位置或速度的精度。
这些参数的具体数值和范围会根据具体的直线电机类型和应用而有所不同。

Copley Xenus០ᏔύЎזೲЋЋн2007.05.17.ठؾᙕ1. ᒔᎁ (4)2. (4)3. ᒵ(ԫ) (4)4. ᒵ(Բ) (5)5. Copley૿ (6)6. ࡳ (7)7. ᚾ (8)8. (8)9. ࡳ (9)10. (11)11. ࡳI/O (12)12. ࡳ (13)12.1 ᇆ (13)12.2 (14)13. auto phase(ྤᑇ) (16)14. auto phase() (19)15. Gantry auto phase (24)A (25)ʳBʳࡳ (26)ठڻ1.0 2005.05.25 Xenus 4.40 ठ࿇1.1 2005.09.12 Xenus 4.40 1.ᒵߓቹ2.ףޡᨏ2ᚾټ;ޡᨏ3ףԵᒵߓቹ।;ޡᨏ14Δࠌauto phase;ޡᨏ15ΔGantryհauto phase 1.2 2005.09.30 Xenus 4.40 1.ޡᨏऱร˵ႈΔףုᙇʳʳΔ֗ቹխ᧩قሽऱףုऱۯΔᚨڇऱ૿1.3 2005.11.21 Xenus 4.40 1. ޡᨏ2ףုᚾټ2. ޡᨏ14ႈ1.4 2005.12.19 Xenus 4.66 800-15XXऱᖄΔףΖ1. ޡᨏ12.1౧ᇆ2. ףԵ12.23. ޡᨏ3ቹ2ΔףԵ”LM Stage Configuration andAccessories”4. ቹ2խAC100~240Vac 1.5 2006.07.04 Xenus 4.66 ޡᨏ3ףԵڇሽΔ/Ζ1.6 2006.10.19 Xenus 4.66 ףڃ1.7 2006.12.11 Xenus 4.66 ףdriverፖᛩ৫,ႈ1.8 2007.05.17 Xenus 4.66 ףࡳ Bڕ۶ᒵࢤፖᦀΔא֗ኔհࡳΖ1. ᒔᎁ ᓮࠃᒔࡳႈΔא܂հشa. ᇆb. ऱ(kg)c. ऱencoder ᇆd. ৫,ऱઌႈ(ᓮXenusUserGuide 2.0ठءऱPage159~162)2.ᚾூڇ/chinese/csupport-1-2.htmऱHIWIN ᇆᙇऱᚾூ(ᥳᒵࢤLMS ֗ྤᥳᒵࢤLMC)Κa. LMS for Copley Xenus 051003.zipb. LMC for Copley Xenus 051003.zipc. LMT for Copley Xenus 051003.zipᚾூխܶᇆ್ऱᇷ(ccm ᚾ)ΖࢨCD ᚾூᎾ່ठء,ᚾټױ౨ڶ՛Ζ3. (ԫ)ᒔঅΔᓮࠌ/ڇሽ( ऱچ)ΔLM Stage Configuration and Accessories ፖቹ 1ΔڶאᒵᎅΚ a. ፖPC հၴຑRS-232ᒵ(ᇆLMACR21D)Ζb. ᒔᎁJ7ऱJ7-3IN1(Enable)ፖJ7-2 Signal Ground ڶᔞऱ್enable נॾᇆΖࠀڕ۶ڇሎ૿Հenable ᇆΖc. ᒔᎁJ8ऱJ8-14IN5()ፖJ8-15 Ground ڶᔞᇆᒵΖ(ᇆLMACS D ࢨLMACSE)AC(Encoder) ᇆቹ 1ᒵقრቹ 4. (Բ) a. ቹ 2AC ᒵ(J1)Δ್Ժᒵ(J2)Δ 24V DC (J4)ऱᦀ(DSP)ᒵΔۯENCODER ᒵ(J8)Δ܀AC ᒵΖb. AC ᓮ൷Line Filter Δۖ AC ᒵΕEncoderᒵΕԺᒵᓮڜΖc. ᒔᎁբᆖΔؚ24V DC Δᒵڕቹ 3ΖAC100~240 Vac 47~63 Hz ࢨ Line FilterᒵRS232ᒵ24VdcԺᒵ (ᇆᇆᒵቹ2Ꮎ൷ᒵቹ3ፖᦀᎾ൷ᒵ5. CopleyΔנቹ4૿Ζቹ4૿6.ਊΔנቹ 5 Basic SetupΔࠀࡳΚa. Motor optionsࡳMotor Family = Brushless ྤMotor Type = Linear ᒵࢤ(Commutation = Sinusoidal )Hall Type = Noneb. SystemࡳOperating mode = PositionPosition Loop Input = Digital inputc. EncoderࡳMotor Encoder = Primary Incrementalቹ5 Basic Setup7.a. ޡᨏ2૿ࠃऱccmᚾΔਊΔנڕቹ 6 Motor/Feedback૿Δਊီ૿ऱᚾΖቹ6Motor/Feedbackb. ૉڶΔױڃBasic Setup૿(ቹ5)ΔࠉᎾᚨࡳΔڕanalogΖHall TypeΔڕࠌdigitalΔঞHall Type = DigitalΖ Operation ModeΔڕ৫ࢨԺΖ8.ਊΔנቹ 6 Motor/FeedbackΔਊᎾMass᥏(ޡᨏ1૿ऱଖ)Ζऱ್բᆖccmᚾሉऱଖΔױאΖ9.ቹ6ਊFeedbacka. ڕࡳIncrementalऱΔנڕቹ7ΔᓮᎾࠌऱ৫ࡳΔڕRenishaw RGH41X1 µmΔRenishaw ߠቹ8Ζቹ7 Feedbackቹ8 Renishaw RGH41Xb. ڕࡳanalogऱΔᄎנڕቹ9ऱ૿ΔᓮᎾࠌऱ৫ࡳΔڕRenishaw RGH41B40 µmΔRenishaw ߠቹ10ΖInterpolation16ऱΔঞᇞ৫0.625 µm(ܛԫଡencoder count = 0.625 µm)Ζቹ9 Feedbackቹ10 Renishaw RGH41B10.ਊΔנቹ11ऱ૿ΔԳ૿ᄎࡉਗࡉૻऱΔ৵ױאΖڕנऱڶլऱଖΔᓮਊcancel Motor/Feedbackऱچ৫ᒔᎁԫڻᒔΔऱਊOKΖࠀਊflash૿Ζቹ11 Calculated Setting.11. I/Oࡳdigital inputΔਊΔנቹ12Ζቹ12 Input/Outputa. ނIN2ࡉIN3ऱࡳNot configuredΖb. IN5Motor Temp HI DisableΖ(ᇆ)c. ૉڶױאࡳᇆऱΖd. ᒔᎁJ7ऱJ7-3IN1(Enable)ፖJ7-2 Signal Groundڶᔞऱ್ᇆᙁנΔؚנᇆΔᒔᎁᇆழΔխ[IN1]ऱᇆᄎΔۊᗉ।قױΔદᗉ।قྤΖᓮᒔᎁΔຍଡᗉદᗉΖe. ᒔᎁJ8ऱJ8-14IN5()ፖJ8-15 Groundڶᔞᇆᒵ(ᇆLMACS DࢨLMACS E)ΖIN5ۊᗉΔڕᒵᄎદᗉΔ।ق್Ζ12.12.1 ᇆਊΔנቹ13Δ૿ՂਊConfigurationࡳa. ࡳᇆControl inputԫPulse and DirectionPulse Up / Pulse Down (ܛCW/CCW)Quadrature (ܛA, Bᇆ)b. ૉਢHIWIN PCI-4PΔFalling EdgeΖc. ࡳStepping ResolutionΔڕanalog৫0.625 µm(ܛԫଡencoder count = 0.625 µm)Δૉ10 InputPulsesΔ16 Output CountsऱΔԫଡऱ౧ঞ 1.6ଡencoder countΔܛ1 Input Pulses1µmΔຍऱΖቹ13 Digital Position Input12.2ԫۖߢڶ૿(ԫॾᇆڶ2ᒵ)ፖ૿(ԫॾᇆڶ1ᒵΔ܀Ꮑऱᒵ)ΖHIWIN800-15XXױፖ2ΔۖXSL-230ڶΖቹ12ਊDigital Inputs 6-12Δᄎנቹ14Ζa. ૉנ૿ΔڕHIWIN PCI-4PΔᦀ800-15XXঞ࣍૿ՀDifferential Control InputΔIN9।قPulse+ΕIN7।قPulse-ΔIN10।قDirection+ΕIN8।قDirection-Ζb. ૉנ૿Δঞ࣍૿ՀSingle Ended ControlInputΔIN9।قPulseΔIN10।قDirectionΔIN7ፖIN8ΔPull up +5VࢨPull downঞנտ૿sinkingࢨsourcingΖIN7~IN10قᇆPulse and DirectionΔڕΔ૿հ᧩قױ।1ΖૉXSL-230ঞྤቹ14ऱControl InputႈΖᒵᓮLM Stage Configuration and AccessoriesΖቹ14 Digital Input।1 800-15XXհDigital Inputق।Digital InputقᇆIN7 IN8 IN9 IN10 IN9 IN10Pulse and Direction Pulse-Direction-Pulse+Direction+Pulse DirectionPulse Up / Pulse Down PulseUp-PulseDown-PulseUp+PulseDown+PulseUpPulseDownQuadrature Input B- Input A- Input B+ Input A+ Input B Input A13. auto phase()ڕauto phaseբᆖΔঞױאޡᨏΖڕ۶auto phaseբ?ᓮڇControl PanelխऱControlऱچEnable Δڕױא।قլޡᨏΖૉྤࠌঞޡᨏΔૉঞޡᨏ14a. ᒔᎁऱenable ᇆऱΔؚACΔਊΔנቹ15Ζቹ15 Motor Direction Setupb. إऱΔ૿Ղऱactual positionڶΖ(ڶױ౨Δڶױ౨)c. ᓮڇሎenableᇆመΖd. ਊnextנቹ16 Motor Wiring SetupΔਊstartΔᦀᒵΔऱΖऱقMotor Wiring has been configuredΖቹ16 Motor Wiring Setupe. ਊnextנቹ17 Motor Phase InitializeΖቹ17 Motor Phase Initializef. ਊInitialize PhaseΖऱנቹ18 Phase hasbeen InitializedΖቹ18 Phase has been Initializedg. ਊFinishΔࠀflashΖޡᨏڶڇࡳԫڻܛױΔլࡳΔೈࢨۯᒵࢨޓΔΖ14. auto phase()ڕauto phaseբᆖΔঞױאޡᨏΖڕauto phaseᒔࡳΔۖऴڇControl PanelխControlऱچEnableΔঞΖa. ᒔᎁऱenable ᇆऱΔؚACΔਊΔנቹ19Ζቹ19 Motor Direction Setupb. إऱΔ૿Ղऱactual positionڶΖ(ڶױ౨Δڶױ౨)c. ᓮڇሎenableᇆመΖd. ਊnextנቹ20ΔਊstartΔᦀᒵΔऱΖऱقMotor Wiring has been configuredΖቹ20 Motor Wiring Setupe. ਊnextנቹ21ΔਊstartΔᦀᒵΔ܀ԫଡᄕΔࠀ32mmΔऱقቹ22խհΔ܀ڼޡᨏױਊSkipΖቹ21 Phase Count Testቹ22 Phase Count Test૿f. ਊSkipࢨNextঞנቹ23ΔਊstartΔᦀऱᇷΔאհشΖቹ23 Hall Wiring Setupg. ऱΔਊFinishΔࠀflashΖh. ૿ऱManual Phaseհᒔᎁ܂Δڇቹ4૿ΔᙇTools Manual PhaseΔנቹ24Ζቹ24 Manual Phasei. ਊEnableΔڕቹ25ΖᓮࣹΔၲհΔ್ڶऱሽΔ್Ζቹ25ࡳj. ਊRevࢨFwdױאڇၲΔૉྤࡳऱΔঞױIncrement RateࢨᏺףCurrentΔૉױࡳΔIncrement Rate (deg/sec) Current (A) LMS 15 2LMC 15 1.5܀ΔؘףΔ܀ঞΖk. ਊၨRevΕFwdΔદរऱࡉ:(1) દរڇਐଡદរխၴ(±30৫Δڕቹ26)Δቹխऱਐ।್Ζڕ60৫ऱદរΔڇڇ30৫~90৫ၴΖ(2) ૉքଡڶԫଡਢદۥΔঞ।قᙥᇆฆΖቹ26 ࡉHalll. ૉદរࢨխၴ30৫Δঞᓳቹ24ऱConfiguration ऱHallsऱHall offset(ߠቹ27)ΔદរڇଡદរխၴΔ܀LMSࢨLMTۖߢࡉ֘ऱoffsetԫΔױאऱoffsetףೈ2܂Hall offsetΖ(ᓮࣹHall Offset±30৫)ቹ27 Hall Offsetm. ਊOkΔࠀflashΖޡᨏڶڇࡳԫڻܛױΔլࡳΔೈࢨۯᒵࢨޓΔΖ15. Gantry auto phaseޡᨏGantryڶΔૉਢGantry(ڕࢨྤ)ঞࠉޡᨏ13ࢨ14Δചauto phasea. հGantryΔ٣խรԫޡᨏ14auto phaseΔรԲঞΖb. Բޡᨏ14հଈauto phase܀ԫΖޡᨏڶڇࡳԫڻܛױΔլࡳΔೈࢨۯᒵࢨޓΔΖܛױٵEnableᇆऱଡၗΖA A.1ᇆၴ(5)050100700001 68 ohms 100W 500W XSL-230-xx 800-15xxA.2:mmʳBʳʳࡳޡᨏ1. ڇ૿ՂΔਊConfigure Regen () Regen Resistor૿2. Custom ResistorਊConfigure Custom Regen Configuration૿3. Resistance()ΔڕॵAհሽԫ68 ohmΔૉΔૉΔঞ204 ohmΖਊNext܂Step 24. Continuous Power()ΔڕॵAհຑԫ100 WΔૉΔঞ300 WΖਊNext܂Step 35. Peak Power(ၴ)ΔڕॵAհၴԫ500 WΔૉΔঞᛳၴ1500 WΖਊNext܂Step 46. Time at Peak Power(ၴၴ)ΔڕॵAհၴၴࡳ5000msΖਊNext܂Step 57. ਊFinishܛݙࡳ。

直线电机安调步骤技术课:黄辉一、方向判断1、直线电机的正向判断:1)线圈移动型(动力电缆的反方向为正向):2)磁板移动型(动力电缆的同向为正向):2、光栅尺的正向判断:1)观察光栅尺主体标记(heidenhaim字样)的方法2)通过位置画面观察准备工作:修改参数2022=111,同时断开直线电机三相动力线手动推动直线电机,POS画面显示坐标值增大的方向即为光栅尺的正向。
3、调整动力线相序当上述直线电机的正向和光栅尺的正向不一致时,必须调整直线电机的动力线进行适应,以保证两者方向相同。
步骤如下:二、参数设定:1、设定平台:系统:31i+PANEL i伺服软件版本:90E3直线电机:Lis15000C2/3HV(磁板宽度60mm,水冷)光栅尺:海德汉LC193F(分辨率0.01um),绝对光栅尺系统检测单位:0.1um(1013#1=1:IS-C,可根据实际需要调整设定)2、参数设定步骤:设定步骤(1):电机初始化1)初始化位:P2000#0=12)AMR设定:P2001=03)移动方向:P2022=111/-111(根据实际需要)4)电机代码:P2020=3915)直线电机有效位:P2010#2=1设定步骤(2):伺服参数设定1)速度脉冲数设定:P2023=3125/16/分辨率(um)=19531(可近似取整)2)位置脉冲数设定:P2024=625/分辨率(um)=62500(超出32767)故可设定P2024=6250,P2185=103)忽略a编码器断线报警:P2013#7=14)设定AMR变换系数:P2112和P2138方法一:仅使用P2112的情况(当计算结果为整数时可使用)P2112=磁板长度(mm)/分辨率(um)=6000,P2138=0 方法二:两者均使用的情况(适用于任何情况):磁板长度(mm)×1000/分辨率(um)=P2112×2P2138计算得出:P2112=46875(超出32767),P2138=7故最终设定:P2112=23438(四舍五入),P2138=8 5)设定柔性齿轮比:P2084和P2085FFG=分辨率(um)/检测单位(um)=0.01/0.1=1/10设定步骤(3):磁极位置检测(在进行该步骤前,先保证直线电机可以动作):1)磁极位置检测功能有效:P2213#7=12)AMR偏执有效:P2229#0=13)编写梯形图将G135的对应位强制为1,磁极位置检测开始4)磁极位置检测完成之后,系统自动将偏置参数写入P2139 设定步骤(4):过热参数设定:对于水冷型直线电机,需要修改如下参数(自冷型初始化设定即可)1)OVC报警参数POVC1:P2062=325632)OVC报警参数POVC2:P2063=25573)OVC报警参数POVCLMT:P2065=76014)电流频率参数RTCURR:P2086=20295)停止时OVC倍率OVCSTP:P2161=140设定步骤(5):绝对编码器设定1)绝对编码器有效:P1815#5=12)绝对零点建立:P1815#4=1(需安装具体步骤和实际情况设定)。
1.調GAIN畫面與步驟
(1)電流迴路有Cp、Ci(P代表剛性、I代表收斂)
(2)速度迴路有Vp、Vi
(3)位置迴路有Pp
調Gain步驟為先調電流迴路,次調速度迴路,最後調整位置迴路
(1)電流迴路使用square wave ,頻率改為10Hz ,電流為原設定值,抓取時間調至
500ms
(2)速度迴路使用sin wave ,頻率改為10Hz ,速度改為50~100mm/s,抓取時間500ms
(3)位置迴路使用sin wave ,頻率改為10Hz ,位置改為32000count,抓取時間500ms
依據command 與actual 來做比較
電流迴路所顯示的波型,實際電流會呈現毛毛狀,要將實際振幅與command振幅
拉至一致
速度迴路所顯示波型,實際速度會較command速度落後為正常,但要將振幅拉至
一致
位置迴路所顯示波型,實際位置與command必須一致
圖一
圖二
2.驗證並依據客戶需求進行GAIN值微調
(1)先依照圖三作設定,設定顯示的內容,勾選自動抓取資料與分析,並設定抓取資料時
間長短
(2)依據客戶所提出之最大速度與最大加減速,在下圖四中做設定,並在移動距離設定為
Stage全行程距離=? count,按下圖四中的Start,直線電機及可移動並抓取可戶所需要之資料。
(3)依據所顯示出來之波型進行GAIN值微調
圖形中若有過衝現象或速度鏈波不符合客戶需求,請依照波形進行Vp、Vi、Pp值的調整。
圖三
圖四。
Helping you build a better machine, fasterPLATINUM ®直接驱动直线电机(DDL)直接驱动直线电机(DDL)简介什么是直接驱动?非常简单,直接驱动就是将一台直线电机(例如,科尔摩根公司 PLATINUM®电机(DDL)。
)直接连接到从动负载上。
采用此种结构,所有机械传动系统(例如,滚珠丝杠副、齿条与齿轮、传动皮带/皮带轮以及齿轮箱)均被取消。
消除了由机械传动带来的间隙、柔度以及与之相关的其它问题。
直接驱动直线电机(DDL)的优点:• 免维护;• 无滚珠丝杠副、齿轮箱、齿条与齿轮、传动皮带/皮带轮;• 零间隙和柔度;• 高刚度;• 高定位精度;• 紧凑的机械装配;• 减少了机器中的零部件数量;• 速度非常平稳;• 静音运行。
PLATINUM® 直线电机(DDL)产品为行业确立高的产能、高精度和零维护的新标准。
科尔摩根公司PLATINUM®直线电机(DDL)科尔摩根公司于十九世纪七十年晚期推出了其第一台直线电机,该电机用于精密“X-Y”工作台和表面喷涂系统。
此种电机是有刷直流电机,并采用科尔摩根公司已获得专利的push-through整流条方法。
为科尔摩根公司在二十世纪八十年代早期开发出无刷型直线电机奠定了基础,该电机用于需要平稳、高刚度、直线运动的胶片加工。
在过去的10年间,随永磁体材料、功率半导体器件以及微处理器技术中的进步,使进一步提高直线电机的性能并降低其成本成为可能。
这些开发已经通过优化被应用到使用便捷、具有成本效益直线电机组件的科尔摩根公司PLATINUM® 直线电机(DDL)产品系列中。
该产品系列由两个基本结构组成:无铁芯和有铁芯。
无铁芯电机在无框架组件之间没有吸力,并具有适合超平稳运动的零齿槽效应。
无铁芯电机具有最高单位体积推力。
此种电机以已获得专利的防齿槽效应设计为特色,这种防齿槽效应设计可通过此种高推力电机产生极其平稳的工作状态。
直线电机参数和选型1.最大电压(max.voltageph-ph)———最大供电线电压,主要与电机绝缘能力有关;2.最大推力(PeakForce)———电机的峰值推力,短时,秒级,取决于电机电磁结构的安全极限能力;3.最大电流(PeakCurrent)———最大工作电流,与最大推力想对应,低于电机的退磁电流;4.最大连续消耗功率(Max.ContinuousPowerLoss)———确定温升条件和散热条件下,电机可连续运行的上限发热损耗,反映电机的热设计水准;5.最大速度(Maximumspeed)———在确定供电线电压下的最高运行速度,取决于电机的反电势线数,反映电机电磁设计的结果;6.马达力常数(MotorForceConstant)———电机的推力电流比,单位N/A 或KN/A,反映电机电磁设计的结果,在某种意义上也可以反映电磁设计水平;7.反向电动势(BackEMF)———电机反电势(系数),单位Vs/m,反映电机电磁设计的结果,影响电机在确定供电电压下的最高运行速度;8.马达常数(MotorConstant)———电机推力与功耗的平方根的比值,单位N/√W,是电机电磁设计和热设计水平的综合体现;9.磁极节距NN(MagnetPitch)————电机次级永磁体的磁极间隔距离,基本不反映电机设计水平,驱动器需据此由反馈系统分辨率解算矢量控制所需的电机电角度;10.绕组电阻/每相(Resistanceperphase)———电机的相电阻,一般情况下给出的往往是线电阻,即Ph-Ph,与电机发热关系较大,在一定意义下可以反映电磁设计水平;11.绕组电感/每相(Inductionperphase)———电机的相电感,一般情况下给出的往往是线电感,即Ph-Ph,与电机反电势有一定关系,在一定意义下可以反映电磁设计水平;12.电气时间常数(Electricaltimeconstant)———电机电感与电阻的比值,L/R;13.热阻抗(ThermalResistance)———与电机的散热能力有关,反映电机的散热设计水平;14.马达引力(MotorAttractionForce)———平板式有铁心结构直线电机,尤其是永磁式电机,次极永磁体对初级铁心的法向吸引力,一般高于电机额定推力一个数量级,直接决定采用直线电机的直线运动轴的支撑导轨的承载能力和选型。
Tel: +886-4-23550110 Fax: +886-4-23550123 E-mail: business@
馬達參數下載步驟
1. 先打開CME2介面
2. 連線至新驅動器出現以下介面
圖一.未設定前CME2之介面
3. 點選圖一中Basic setup選項出現圖二之介面,先進行(1)設定須與圖中設定一致,再將(2)
步驟的Hall Type選至None選項(無論是否有Hall sensor) , 再進行第三步驟
圖二.basic setup設定步驟圖示
]
Tel: +886-4-23550110 Fax: +886-4-23550123 E-mail: business@
4. 完成步驟3.後,點選圖一中之motor/feedback選項,出現介面如圖三所示,按下紅框處,
選取正確的馬達參數檔案
圖三.馬達參數輸入介面
5. 在結束馬達參數設定後,若有Hall sensor時,即回到圖二將Hall type選至Digital或
analog選項,再存至驅動器之flash中。