西威XVY伺服驱动器海天J5机型调试手册(参考)
- 格式:pdf
- 大小:830.59 KB
- 文档页数:22
西威变频器调试资料一. 西威变频器是由意大利生产的一种高性能的驱动器,在国内最先是由西子OTIS应用的,在匹配同步电机方面有着独特的优越性:首先该驱动器的PI功能相当丰富,可以细分为4段(包括一个零速PI),而且宽度可调,所以在匹配无齿电机时可以不加予负载信号,启动不会有倒溜的情况发生;其次它内部有两套自整定程序:一是电机参数自整定,它可以自动的整定出电机的相间电感和电阻常数,避免了由于电机厂家提供电机参数不全而导致调试难度的提高;另一个是无齿定位自整定,该程序是检测编码器和电机磁极相对应的位置。
二. 配线说明:U1,V1,W1变频器的进线输入U2,V2,W2变频器的输出+BR1,-C 接制动电阻1,2模拟量输入端12(ENERGE)使能信号13(FWD)正转14(REV)反转19(COM) 公共端36(SPD1)多段速1 37(SPD2)多段速238(SPD3)多段速380,82(DRIVE OK)故障输出83,85(BRAKE)抱闸检测输出由于变频器内部控制板的0V和变频器的地是连通的,而我们主板的0V和地是不连通的,在有些场合,变频器的0V和主板的0V就存在着压差,会导致主板反馈口或变频器分频卡的损坏。
变频器控制板上(拆下分频卡就可以看到)有个S24的跳线,需将该跳线拔掉(V3.5版请剪掉S35的连接线),变频器中的零和地就分开了,小功率的变频器中电源板上还有个红色的S1跳线,位置就在风扇控制线的下方,必须拔掉S1跳线才可能将零和地彻底分开,另外请注意,控制板上也有个S1的跳线,用于版本的初始化,这跳线不能拔去,否则所有参数将全部初始化。
如果实在不能分开,请将开关电源上的0V和地连起来,这就保证变频器控制板的0V和主板的0V同电位。
编码器:XS插座分频卡EXP-E上的XF0端子分频卡上的跳线S1,S2决定分频系数,1分频(S1-OFF,S2-OFF),2分频(S1-OFF,S2-ON),4分频(S1-ON,S2-OFF),8分频(S1-ON,S2-ON)编码器尽量选用海德汉的1387型号,而487编码器有些地方能匹配,有些地方却不行。
使用手册感谢您选择西威集团产品。
我们很乐意收到您为我们提供的一切资料,帮助我们改进此说明书。
我们的电子信箱是:techdoc@siei.it.在使用本产品之前,请务必仔细阅读本说明书的“安全指南”章节在本产品运行期间,说明书必须妥善保存于安全的地方,便于工程和安装人员使用。
西威(SIEI)集团有权在不做通知的情况下修改其产品、数据和尺寸。
该数据仅用于产品描述,不能把这些数据理解为是合法声明的产品性能。
此说明书已根据3.5XX版软件和RV33-4调节卡予以更新。
在本变频器的名牌或在安装于调节卡的FLASH存储器的标签上可查看到该版本软件标识号。
目录安全图例 (6)安全须知 (7)第一章功能和基本特点 (13)1.1变频器 (13)1.2电机 (15)第二章检验程序、元件标识和标准规格 (17)2.1到货检验程序 (17)2.1.1概述 (17)2.1.2变频器类型标定 (17)2.1.3名牌 (18)图 2.1.3.1名牌标识 (18)图 2.1.3.2固件和插卡修改级别名牌 (18)图 2.1.3.3名牌位置 (18)2.2元件标识 (19)图 2.2.1:频率变频器基本设置r (19)2.3标准规格 (20)2.3.1允许环境条件 (20)环境 (21)2.3.2AC输入/输出连接 (21)2.3.3AC输入 (21)2.3.4AC输出 (21)表2.3.4.1列出了功率减少因素值 (22)图 2.3.4.1在实现转换频率功能时变频器的功率 (23)表2.3.4.2-A过载容量(尺寸1007至4370) (24)表2.3.4.2-B过载容量(尺寸5450至81600) (25)2.3.6精度 (26)表 2.3.6.1最大/最小输出频率 (26)2.3.5输入/输出和编码器的规格 (26)表 2.3.6.4转矩规格 (27)表2.3.6.2速度参考值/反馈分辨率和最大限值 (27)表 2.3.6.3调速器带宽 (27)第三章机械安装导则 (28)3.1尺寸和装配方法 (28)图3.1.1变频器尺寸(型号1007-3150) (28)图3.1.2装配方法(型号1007-3150) (28)表3.1.1变频器尺寸及重量对照表(型号{}1007-3150) (29)图3.1.3变频器尺寸(型号4220-81600) (29)图3.1.4装配方法(型号4220-81600) (30)表3.1.2变频器尺寸及重量对照表(型号4220-81600) (30)图3.1.5键盘定位 (30)3.2功率损失、散热、内置风扇和建议采用的机柜最小冷却开口 (31)表3.2.1散热和空气流量要求 (31)表3.2.2建议采用的机柜最小冷却开口 (31)3.2.1冷却风扇电源 (32)图3.2.1AVy7900,AVy71100和AVy71320型号配备的UL型风扇接线图 (32)图3.2.2AVy6750和AVy81600型号配备的UL型风扇接线图 (32)图 3.2.3外部接线举例 (33)3.3安装固定间隙 (34)图3.3.1最大倾斜角 (34)图3.3.2安装间隙 (34)第四章接线程序 (35)4.1通向接头 (35)4.1.1撤除外盖 (35)图4.1.1:撤除变频器外盖(1007-3150型) (35)图4.1.2:撤除变频器外盖(4185-81600型) (36)4.2电源部分 (36)4.2.1.电源部分端子布置/电缆横截面 (37)表4.2.1.11007-3150型电源部分端子 (37)表4.2.1.24185-81600型电源部分端子 (37)表4.2.1.3电源端子用电缆最大横截面 (38)表4.2.1.4调节器部分的插入端子所允许的最大电缆横截面积 (39)表4.2.1.5最大控制电缆的长度 (39)4.3调节部分 (40)4.3.1RV33-4调节卡开关及跳线 (40)表4.3.1.1调节卡上的发光二级管及测试点 (40)表4.3.1.2调节卡RV33上的跳线及和双向开关 (41)4.3.2寄存器部分端子分配 (42)表4.3.2.1插入式端子条分配 (42)4.4控制部分的电压 (43)图4.4.1-A控制部分的电势,数字输入/输出NPN连接...................................................,.. (43)图4.4.1-B控制部分的电势,数字输入/输出PNP连接 (44)4.5编码器 (45)表4.5.1推荐的连接编码器的电缆截面积及其长度 (46)表4.5.2通过跳线S11-S23的编码器设置 (46)表4.5.3编码器连接 (46)表4.5.4用于正弦或数字编码器的高密度XE连接器的分配 (49)4.5.1XFR连接器分配(EXP-RES)扩展板可选,用于提高分辨率) (49)4.5.2编码器模拟 (50)4.6配线表 (51)图4.6.1标准配线表 (51)4.6.1扩展板连接 (52)图4.6.2公共输出连接器管理 (52)图4.6.3隔离输出连接器管理 (53)4.7电路保护 (54)4.7.1电源部分的外部保险丝 (54)表4.7.1.1AC输入侧的外部保险丝类型 (54)4.7.2DC输入侧电源部分外部保险丝 (55)表4.7.2.1DC输入侧的外部保险丝类型 (55)4.7.3内部保险丝 (55)4.7.3.1内部保险丝 (55)4.8扼流圈/过滤器 (56)4.8.1交流输入扼流圈 (56)表4.8.1.1:3相交流输入扼流线圈 (56)4.8.2输出扼流圈 (56)表4.8.2.1推荐的输出扼流圈 (57)4.8.3抑制滤波器的干涉 (57)4.9制动单元 (58)图4.9.1.1内部制动单元和外部制动电阻器的连接 (58)4.9.1内部制动单元 (58)图4.9.1.1内部制动单元和外部制动电阻器的连接 (58)4.9.2外部制动电阻器 (59)表4.9.2.1外部标准电阻器的列表和技术资料 (59)图4.92.2典型三角形轮廓的限制操作制动循环 (59)图4.9.2.3TBR/TC=20%情况下制动循环 (60)图4.9.2.4三角形轮廓普通制动循环 (61)表4.9.2.2不同的主电路的制动阈值 (62)表4.9.2.3内部制动单元技术资料 (62)4.10调节器电源的缓冲 (63)表4.10.1DC回路缓冲时间 (63)图4.10.1通过附加内部电路电容器缓冲调节电压 (64)4.11DC侧放电时间 (65)表4.11.1DC回流放电时间 (65)第五章串行接口说明 (67)图5.1RS485串行接口 (67)5.1RS485串行接口连接器描述 (68)表5.1.1用于RS485串行接口的插头XS连接器命名 (68)第六章键盘操作 (69)6.1LED和键盘 (69)6.2进入菜单项 (71)6.3使用键盘帮助 (71)6.4变频器主菜单 (72)第七章通过键盘调试 (73)7.1AVy-AC/AC4调试(同步马达)调试创建程序 (73)7.1.1磁场定向模式 (75)7.1.2无传感器矢量模式 (85)7.1.3电压/频率控制 (86)7.2AVy-BR/BR4(无电刷电机)调试创建调试模式 (99)第八章电梯时序 (115)图8:1:标准命令时序 (116)图8:2:启动详解 (117)图8.3:停机详解 (118)图8.4:方向命令和接触器控制信号之间的关系 (119)第九章参数 (121)9.1参数图列 (121)9.2参数说明 (122)第十章故障诊断 (206)图10.1发光二极管状态和键盘 (206)10.1调节报警事件清单 (207)表10.1.1调节报警事件 (208)10.2配置清单和数据库错误报警事件 (210)10.2.1配置错误 (210)10.2.2数据库错误(DB错误) (211)10.2.3所有自动调谐程序的错误代码清单...............................................................................................213表10.2.3.1:自动调谐程序的错误信息...............................................................................................................213第十一章电磁兼容性(EMC )导则、符合EC 标准声明...............................................214第十二章参数索引 (217)安全标志图例注意!表示基本的或重要的程序、条件或声明。
伺服控制器调试说明伺服控制器调试前必须做好以下两项准备工作:1. 将静叶置手动状态,使用电磁阀关闭静叶,现场观测静叶应该向关小的方向动作。
静叶关到最小时,位置传感器的反馈电流应为4mA 左右(不要求是准确的4mA 。
2. 将静叶置手动状态,使用电磁阀开启静叶,现场观测静叶应该向开大的方向动作。
静叶开到最大时,位置传感器的反馈电流应为20mA 左右(不要求是准确的20mA 。
开始调试:1. 将静叶置手动状态,使用电磁阀完全关闭静叶,按手操器F1 键,此时手操器屏幕上有“确定传感器新零点”字样,按回车键确认。
2. 将静叶置手动状态,使用电磁阀完全开启静叶,按手操器F2 键,此时手操器屏幕上有“确定传感器新量程”字样,按回车键确认。
3•同时按下手操器shift和F1键即F5键,此时手操器屏幕上有设定K值”字样。
设置K 值为 1.0000。
此时将静叶置手动状态,使用伺服阀控制静叶,在静叶开度设置框中打入不同数字,现场观测静叶应该可以动作。
如果静叶不动作, 请将K 值设定为-1.0000。
K值只能为1.0000或-1.0000。
更改K值先同时按shift和F1,再按回车键,此时K 值的末位数字闪烁,按下shift 不放同时按上下键可以将光标左右移动。
单按上下键可以改变光标所在位的数字。
4. 将静叶置手动状态,使用伺服阀控制静叶, 在静叶开度设置框中打入0.0, 现场观测静叶应该关到最小。
此时按下F3键,此时手操器屏幕上有确定指示电流新零点”字样, 按回车键, 更改此值为6400.0, 按回车键确认。
通过增加或减小指示电流零点的值使电脑中显示静叶开度为0.0~0.5%。
5. 将静叶置手动状态,使用伺服阀控制静叶, 在静叶开度设置框中打入100.0,现场观测静叶应该开到最大。
此时按下F4键,此时手操器屏幕上有确定指示电流新量程”字样, 按回车键,更改此值为32000.0,按回车键确认。
通过增加或减小指示电流量程的值使电脑中显示静叶开度为99.5~100.0%。
kdy 2008-12-31 18:02 很想了解,以便今后快速处理故障。
哎呀凡心2009-01-02 12:51 OH5000调试资料分享0LCBII 用于sOH5000 电梯Gui[/iY,F对于OH5000电梯s 系统,LCBII 采用LSVF_W的控制方式,即速度采用V 码输出,输入信号使用DS 码。
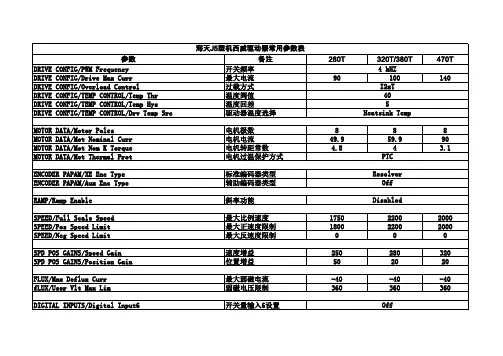
Pv\8 \,B9OH5000电梯(s)调试Odhr=HsSIEI 变频器应用培训Iij$ce`nx用服务器设置LSVF_W控制方式:]gaeN2M1-3-1-4 Drive: 17 ;+KNd%AJ平层装置采用 2 个光电开关ULZ和DLZ fy|I32 光电距离为6cm 左右,平层隔光板长度25cm;X{6a光电信号通过LPB2转换后,分别送给LCBII 和变频器,作为位置参考信号;BD86t[${W LCBII 采用 2 个光电作为门区信号,因此要作如下设置:M1-3-1-6 DZ-TYP: 1 ~3f|-%ZLSVF_W:V 码含义及转化e-\/1N84LSVF_W:DS信号AP1ZIc6硬件系统框图:2C <;o驱动器及电机参数的设置/ 检查b0@K ~O;g上电后首先检查STARTUP/Startup config/Setup mode 中的Drive data 和Motor data ,参照右表。
8Djki]特别注意,必须将Spd ref/fbk res 设为,否则电机运行不正常。
ZW0\_1 Startup config 中的参数设置.j tv Hr}USTARUP/Startup config 中的参数为电梯运行最基本的参数,必须正确设置;BF;}9QebmS参数设置可参照参数一览表,这里只将机械参数Mechanical data 和编码器参数Encoder config 的设置列出。
o ayu*a.设置好参数后,须执行Save config 存盘。
>kmgYWG 无齿轮电机的自学习r3-<~k- 将钢丝绳从曳引轮上取下(由于定位时须松开抱闸,故进行旋转自学习);V`W'] 打开抱闸,使接触器吸合,给出Enable 信号;U?5lqq 无齿轮电机的自学习[m 6+I9由于无齿轮电机采用永磁材料,仅需执行电流自学习;8"-=+ 开始后,面板上将显示自学习进度;,9_O4O% 无齿轮电机的定位(硬件准备).P")S| 无齿轮电机在运行之前必须进行编码器定位,定位前:8~s0%%{,M 曳引轮上的钢丝绳必须取下;3;> z %{ 短接接触器,并确认接触器吸合;pL`Q+}c} 短接抱闸继电器,手动曳引轮确认抱闸打开;c_M[>#` 可能会出现Brake fbk loss 和Contact fbk loss 故障,应进入Alarm config 中将这两个故障屏蔽,如有其他报警则应该排除故障后进行定位;\)wch P_0准备短接线,最好是空气开关,应能在定位过程中随时将Enable 和Start 和+24V;4Y2I'~' 无齿轮电机的定位(参数调整)^,AE;Z T7 设置以下参数:$;Iz7:#jNREGULATION PARAM/Test generator/Test gen mode = Magn curr ref ;d,(q 3 REGULATIONP ARAM/Test generator/Test gen cfg/Gen hi ref = 5000 [cnt] ~_ZK93o(/Gen low ref = 5000 [cnt] ;@fp@1nSERVICE/Brushless/Rho L = 0 <2&qIvHLSERVICE/Brushless/Rho H = 0 ;/HhA2 (g% 将Enable 和Start 与变频器+24V 短接;V:J|shRo 进入Monitor 菜单监控变频器输出电流:步骤 2 中的设定值必须使输出电流接近或等于电机的额定电流。
威控自動化機械股份有限公司YASKAWA驅動器調整說明
2010.11.26
一、先安照之前步驟將馬達AUTO TUNING 過後再行作微調。
二、微調步驟:
1、將驅動去程式打開、選擇Trace。
2、選擇Setup。
3、將紅色框框處選擇為成跟下圖一樣、按下OK:
4、將AUTO調至200、200、1、FULL。
5、跳回將程式,工程模式PPX下,記得要把LOCK 打勾讓PPX跑。
6、跳回此畫面按下Start 在選擇否。
此馬達收斂狀況不理想。
P.S Pn100:速度迴路增益Pn101:速度迴路積分時間常數Pn102:位置回路增益Pn103:轉動慣量比Pn161:反共振頻率
有問題在跟我討論一下,因為我也還在學習中,之後我會再出一份正式更詳細的說明,是給產線作為調機用的。
在調整馬達參數時,我會盡量把速度提高至185000,減速度用0.03,再盡量把他調至理想狀況。


西威变频器设置详解操作面板按键说明, -Torque:变频器输出负转矩, +Torque:变频器输出正转矩, Alarm:变频器有故障报警, Enable:变频器使能, ZeroSpeed:速度为零速, Limit:变频器输出电流达到最大极限电流控键功能功能控键功能功能下翻改变菜单和参数.在参数和给定起动变频器运行的起动指令键 /帮模式,改变其值.Help此键无效.助按SHIFT+此钮,查看最大值上翻改变菜单和参数.在参数和给定停止变频器停止指令键 /报模式,改变其值.Shift+Alarm查警看故障加速返回编辑数字参数时,选择参数的位,使用内部电位器,按此钮增加速/点/取其他情况用于退出设定模度给定.加上档键,点动动消式.Escape用于退出设定模式内部电位器, 按此钮减小速度减速参数设定模式中确认所设定的新给定.若加上档键,在点动和电/旋确认值. SHIFT+Home回到基本菜单中位器模式中改变旋转方向转选择按钮第二功能:Rotation上档control~Jog~Help~Alarm~键Escape, Home恢复出厂值:进入STARTUP/STARTUP Config/Load default菜单,按回车~保存参数方法:进入STARTUP/Save config菜单~按回车变频器调试步骤:Menus:(一级目录)1. MONITOR(监控)2. STARTUP(启动)3. TRAVEL(驱动)4. REGULATION PARAM(调节参数)5. I-O CONFIG(I-O配置)6. ALARM CONFIG(报警配置)7. COMMUNICATION(通讯)8. APPL CARD CONFIG(APPL卡配置)9. CUSTOM FUNCTIONS(客户功能)10. SERVICE(服务功能:无齿自动定位用)第一步:变频器自学习1( 在设置或修改驱动器或电机参数后再进行自学习。
参数名称单设定值备注位启动菜单/调节模式/调节模式 Field 面向现场SARTUP/Regulation mode/Regulation mode oritented 启动菜单/启动菜单配置/进入安装模式SARTUP/Startup config/EnterSetup mode参数名称单位设定值备注变频器数据/主电压Drive data/Mains voltage v 变频器数据/外界温度Drive data/Ambient temp ? 变频器数据/开关频率Drive data/Switching freq KHZ 变频器数据/速度参考/反馈 Drive data/Spd ref/fbk res rpm 电机数据/额定电压Motor data/Rated voltage V 电机数据/额定电流Motor data/Rated curren A 电机数据/额定速度Motor data/Rated speed rpm 电机数据/额定频率Motor data/Reted frequency KW 电机数据/功率因数Motor data/Cosfi 电机数据/电机效率Motor data/Efficiency 电机数据/电机参数Load default mot 参数名称单位设定值备注调节参数/速度调节器/基准值/速度比例增益基准值 A/rpm 默认启动和停车震REGULATION PARAM/Spd regulator/Base values/SpdP base value 动调节调节参数/速度调节器/基准值/速度积分增益基准值 A/rpm 默认 REGULATION PARAM/Spd regulator/Base values/SpdI base value2(由于转子是永磁的~不需要进行磁场自学习~只进行电流自学习。

伺服电机调试手册伺服电机这玩意儿,在现代工业里那可是相当重要!就好像是机器的“动力心脏”,要是调试不好,这机器运转起来可就容易出岔子。
我记得有一次,我去一家工厂帮忙调试伺服电机。
那是一个炎热的夏天,车间里的温度高得吓人,汗水不停地从额头往下淌。
这台机器是新引进的,厂家的技术人员还没来得及培训,工人们就着急要开工。
我到了现场,看到那一堆错综复杂的线路和陌生的控制面板,心里也有点打鼓。
但是没办法,硬着头皮也得上啊!我先仔细地研究了一下说明书和相关资料,然后开始动手调试。
第一步,当然是要检查电机的连接线路,确保没有松动或者接错的地方。
这就像是给人做体检,先得把外在的情况搞清楚。
我拿着万用表,一根线一根线地测,眼睛紧紧盯着表盘上的数字,生怕错过了任何一个小细节。
接着,就是设置参数了。
这可真是个技术活,要根据机器的具体需求来调整转速、扭矩等等。
我一边对照着机器的规格书,一边在控制面板上小心翼翼地输入着数字,每按一次确认键,心里都祈祷着千万别出错。
在调试的过程中,还遇到了一个小插曲。
电机突然发出了一阵异常的响声,吓得旁边的工人都往后退了几步。
我赶紧停下手中的操作,仔细听着声音的来源。
原来是一个螺丝松了,导致电机运转不平衡。
我迅速找到那个螺丝,用扳手拧紧,这才让电机恢复了正常。
调试完之后,还不能马上就说大功告成了。
得进行试运行,观察一段时间,看看电机在各种工况下的表现是否稳定。
这时候,我的心还是悬着的,就怕在试运行的时候又出什么问题。
好在,经过几个小时的努力,这台伺服电机终于调试好了,机器也顺利地运转起来。
看着工人们脸上露出的笑容,我心里那叫一个满足。
下面咱就正式来说说伺服电机调试的那些事儿。
首先,在调试之前,一定要做好充分的准备工作。
把需要用到的工具都准备齐全,像万用表、螺丝刀、扳手这些,可别等到要用的时候才发现没带,那可就抓瞎了。
然后,要对电机的型号、参数、工作环境等有一个清晰的了解。
接下来就是具体的调试步骤啦。
H厦门海为科技有限公司目录前言 (3)1、阅读说明 (3)2、产品检查 (3)3、关于手册 (3)4、图标说明 (3)第一章安全须知 (4)1、使用时之注意事项 (4)2、使用环境之注意事项 (6)第二章硬体说明及安装 (7)1、使用环境 (7)2、型号说明 (10)3、产品规格 (11)4、电机旋转方向定义 (12)5、基本配线图 (12)6、外形尺寸 (15)7、不同模式下接线图说明 (17)8、接口 (20)9、输入/输出接口类型 (23)第三章操作面板说明 (30)1、操作面板说明 (30)2、功能一览 (32)3、控制状态显示模式 (33)4、报警模式 (34)5、参数编辑模式 (35)6、定位数据编辑模式 (36)第四章运行 (37)1、信号的说明(输入信号的优先顺序) (37)2、运行步骤选择 (38)3、运行确认 (39)4、运行 (40)第五章功能参数说明一览表 (53)1、参数的分类 (53)2、功能参数一览表 (53)第六章功能参数详细说明 (60)1、基本设定参数(P1.01~50) (60)2、控制增益、滤波器设定参数(P1.51~99) (72)3、自动运行设定参数(P2.01~50) (79)4、扩展功能设定参数(P2.51~99) (91)5、输入端子功能设定参数(P3.01~50) (98)6、输出端子功能设定参数(P3.51~99) (110)第七章通讯 (125)1、设定伺服驱动器 (125)2、通信规格 (125)3、传输协议 (126)第八章故障指示及对策 (132)1、检查 (132)2、状态显示 (132)3、报警的处理方法 (133)第九章电机 (139)1、伺服电机产品特点 (139)2、伺服电机型号说明 (139)3、伺服电机参数表 (140)4、贮运 (148)5、接线 (148)第十章选件与辅助设备 (149)1、关于选件 (149)2、驱动器制动标准配置 (149)前言非常感谢您选用Haiwell 伺服驱动器!本手册包括Haiwell 伺服驱动器使用时的操作说明和保养注意事项。
海天注塑机伺服驱动器说明书Hi-2#系列驱动器风冷Hi系列伺服驱动器为我司公司自主研发的高性能伺服驱动器,每年在注塑机行业配套使用2万台以上,已成为注塑机行业高响应、高精度、高速系列中大型伺服电机配套伺服驱动器。
产品不仅销往国内各地,还远销欧美和东南亚等世界各地。
可对电机进行高响应、高精度控制支持多种编码器支持编码器仿真输出支持多种国际主流总线风冷要点速览输入电压功率额定输出电流过载能力冷却方式3相 380V~480V 5.5-18.5kW 12-37A150%,60s200%, 1s(开关频率2kHz)风冷系列特点1. 该机壳功率涉及5.5、7.5、11、15、18.5kW;2. 可对电机进行高响应、高精度控制;3. 支持旋转变压器、海德汉ENDAT多圈绝对值编码器等多种编码器;4. 支持编码器仿真输出;5. 可工作于转矩控制、转速控制、位置控制、压力控制等多个模式;6. 支持Modbus、CAN、EtherCAT等多种国际主流总线;7. 支持模拟量I/O、数字量I/O等多种外围接口;8. 支持手持操作器、PC端上位机、wifi互联网远程连接等多种调试方法;9. 可用于液压注塑机、全电动注塑机、压铸机、铝挤出机,折弯机、伺服冲床等多种机床领域。
Hi-3#系列驱动器液冷/风冷Hi系列伺服驱动器为我司自主研发的高性能伺服驱动器,每年在注塑机行业配套使用2万台以上,已成为注塑机行业高响应、高精度、高速系列中大型伺服电机配套伺服驱动器。
产品不仅销往国内各地,还远销欧美和东南亚等世界各地可对电机进行高响应、高精度控制支持多种编码器系列特点1.该机壳功率涉及18.5、22、30kW;2. 可对电机进行高响应、高精度控制;3. 支持旋变、海德汉ENDAT2.1/2.2、正余弦等编码器;4. 支持第2编码器、增量式编码器输出;5. 可工作于转矩控制、转速控制、位置控制、压力控制等多个模式;6. 支持Modbus、CAN、EtherCAT等多种国际主流总线;7. 支持模拟量I/O、数字量I/O等多种外围接口;8. 支持手持操作器、PC端上位机、wifi互联网远程连接等多种调试方法;9. 可用于液压注塑机、全电动注塑机、压铸机、铝挤出机,折弯机、伺服冲床等多种机床领域。
ARTDrive L转矩矢量电梯专用变频器使用手册SIEI 操作手册安全须知注意!根据EEC标准,只有在检查确认机器是那些符合89/392/EEC条款的设备制造的后,Avy及其附件才可以使用。
警告-电气击伤和烧伤危险当时用某些仪器比如示波器去测量带电设备时,示波器的外壳必须接地,而且应使用差分放大输入。
在选择探头,调试示波器时应格外小心这样才能安全读数。
为进行正确操作及调试,仔细阅读仪器生产厂家的操作手册。
警告-火灾和爆炸危险火灾和爆炸通常是由把传动装置放置在危险的地方,比如充满易燃易爆气体或粉尘的地方。
传动装置应放置在远离危险的地方,即便使用那些可以在以上地点使用的电机。
警告-扭伤不正确的抬举方式可能造成严重的人身伤害。
只有经过培训的专业人员使用适当的装置进行以上操作才是可取的。
注意!传动装置的接地和电机的接地必须遵守标准。
警告在装置上电前把盖板放回原处。
否则可能导致死亡或严重伤害。
警告变频调速传动装置是用于工业现场安装的电气设备。
在使用过程中装置的部分是带电的。
因此,电气安装和设备的开盖操作应由合格的专业人员进行。
电机和传动装置的不正确安装将导致人身和设备的损坏。
传动装置本身未带电机超速保护。
必须严格遵守手册中的指示和当地及国家的有关适用规定。
小心且勿连接到超过技术指标允许的电压波动范围的供电电源上。
如果过高的电压加在传动装置上将有可能损坏内部器件。
小心没有接地导线的条件下切勿操作传动装置。
电机外壳的接地应使用一根区别于其他接地柱的接地柱,这样可以避免噪声耦合。
接地连线的截面积应符合NEC标准或CEC标准。
连接可以采用UL列出的或CSA认可的闭环端子连接,这样可使用相应的序列规格。
施工时应使用生产厂家认可的压弯工具。
小心不要在传动装置端子或控制电路端子上进行绝缘测试。
小心因为环境温度将影响装置的寿命和可靠性,所以不要在超出允许温度的地点安放装置。
在104°F(40℃)或以下温度时请保持通风。
伺服系统简易调试说明⼀.确定驱动器型号⼆.伺服系统接线(驱动器→电机→油泵)1. 驱动器(1)功率7.5KW~15KW:(2)功率18.5KW~30KW:(3)功率37KW~75KW:因内置制动电阻,故⽆需外线连接。
其余端⼦与上述接法相同。
2. 电机3.油泵(压⼒传感器)三.驱动器主板接线注:22、23、24为CAN通讯端⼦,在有并泵情况下才需要使⽤。
详情请阅读完整说明书。
四.驱动器调试在检查接线⽆误后,可进⾏驱动器调试。
请按以下步骤操作:注:通过M/E键(选择参数类型),上下右键(选择具体参数),点DATA键查看现时数值,再点DATA键进⾏修改。
数值闪动代表正在选择修改该数值,可按右键选择修改位置。
修改后再点DATA键保存,此时数值静⽌不动。
如⽆法进⾏操作,可输⼊OP1=2637、OP8=0000进⾏解锁,再做操作。
调试前请先对油泵进⾏排⽓操作。
①待机状态:设置参数前需先断开使能,并按⼀下STOP键。
②初次化:先修改OP4=0进⾏复位。
然后再修改OP4=100。
③设置电机参数:根据电机铭牌参数,设置P4.01-P4.06参数。
④设置系统参数:P2.09(电机允许最⼤转速)、P2.10(系统允许最⼤压⼒值)。
⑤⾃学习:分别修改OP3=3、OP3=1、OP3=0进⾏⾃学习。
注:⾃学习通过后,会闪过Er---表⽰通过。
⑥判断转向:在⾃学习通过后,修改0P6=5。
按住上键,若连轴器转动⽅向与油泵标识箭头⽅向⼀致则为正转。
若为反转,则互换驱动器UVW三相其中两相的位置,再重新⾃学习即可。
⑦上述步骤完成后,可通过上位机给予指令测试动作。
海天伺服驱动器调试步骤(Hi300系列)一、海天驱动+海天电机调试步骤1、对照图纸检查线路:检查地线,电源线,电机线,编码器线,制动电阻线,以及相关控制线(压力流量控制,压力传感器反馈,使能信号,驱动警报输出信号)2、解锁操作器:拔下使能端子CN3,启动马达上电,驱动显示0.0,按“上下键〃切换参数,选择USErO,按“Ent〃确认,输入3000,再次按“Ent〃确认,解锁操作器,解锁后操作等级为USEr3。
3、按Esc返回参数r∪页面,按“上下键〃切换参数;BUOO1,正常结束显示当前编码器角度,建议多做几次对比角度参数,前后接近则正常。
注意:此过程一定检查溢流阀是否完全松开,否则不准,整个过程电机会转1圈左右;(2)若零位自学习报警Er068,由于电机反转导致(把CS04由。
改1,或者断电调整电机线中任意两相,推荐换线),然后重新做电机零位自学习SP.03=1212∙(3)零位自学习正常,则电机一定为正转,可以跳过试运行判断方向。
6、电机试运行:5211=20(试运行转速20「/(7^),然后上使能,按RUN,查看电机旋转方向(从电机屁股位置向油泵方向看,顺时针则正转),结束按STOP即可。
9、设置底压底流:打开功能:PR.09=0,PR.1O=O;底压一PR.46=2(bar),底流一PR.45=5(2000x5%=IoO转)。
10、插上使能端子CN3,调试完成,关电重启即可。
备注:以上1-10步为单泵调试流程,涉及多泵设定,每个电机都需按照上述1-6步骤调试完成,然后区分主从泵,再按如下步骤口・12调试。
二、海天驱动+其他电机调试步骤1、对照图纸检查线路:地线,电源线,电机线,编码器线,制动电阻线,以及相关控制线(压力流量控制,压力传感器反馈,使能信号,警报输出信号)2、解锁操作器:拔下使能端子CN3,启动马达上电,驱动显示0.0,按“上下键〃切换参数,选择USEro,按“Ent〃确认,输入3000,再次按“Ent〃确认,解锁操作器,解锁后操作等级为USEr3。