adams第五章 初始条件和运动点轨迹
- 格式:pptx
- 大小:228.08 KB
- 文档页数:22
adams教程Adams教程-基本概念与应用Adams是一种重要的多体动力学仿真软件,广泛应用于机械工程、汽车工程、航空航天工程等领域。
本教程将介绍Adams的基本概念和应用,帮助读者快速入门并掌握该软件的基本操作技巧。
1. Adams简介Adams是一种基于多体动力学理论的仿真软件,能够模拟和分析复杂的机械系统的运动和力学行为。
它采用了基于弹簧、阻尼和惯性模型的多体动力学算法,能够准确地预测系统的运动轨迹、速度、加速度等关键参数。
2. Adams界面与基本操作Adams的界面直观友好,主要包括模型空间、运动学仿真、力学仿真等模块。
在模型空间中,可以创建和修改机械系统的模型;在运动学仿真模块中,可以模拟系统的运动轨迹;在力学仿真模块中,可以分析系统的力学特性。
3. 创建模型与约束在Adams中,模型的创建是基于几何图形和物体的属性。
可以通过导入CAD文件或者手动绘制几何图形来创建模型,并为每个模型设置合适的质量、惯性矩阵等属性。
通过添加约束条件,可以模拟系统中各个物体之间的相对运动关系。
4. 仿真与结果分析一旦模型和约束设置完成,就可以进行仿真分析了。
Adams提供了多种仿真方式,如动态仿真、静态仿真、优化仿真等。
仿真结果可以通过图表、动画等形式进行展示和分析,帮助工程师深入理解系统的运动行为和受力情况。
5. 应用案例最后,本教程将通过一些实际应用案例来展示Adams的具体应用。
例如,利用Adams模拟汽车悬挂系统的运动特性,预测系统在不同路况下的动力学行为;利用Adams模拟飞机起飞和着陆过程,评估系统在不同条件下的稳定性和安全性等等。
通过本教程的学习,读者将能够掌握Adams的基本操作技巧,理解多体动力学仿真的基本原理,并能够利用该软件进行机械系统的仿真分析。
希望读者能够通过这些知识和技能,在工程领域取得更好的成果。
ADAMS运动学分析简介ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一款用于进行多体动力学仿真分析的软件。
它是一种基于动力学原理的分析方法,可以用于研究物体的运动与力学关系。
本文档将介绍ADAMS软件的运动学分析功能,并提供一些使用指南。
运动学分析的定义运动学分析是指研究物体运动的位置、速度和加速度等基本特征的分析方法。
ADAMS通过求解物体的运动方程,从而得到物体在运动过程中的位置、速度和加速度等参数。
运动学分析的基本步骤进行运动学分析通常需要以下几个基本步骤:1.建模:首先需要将待分析的物体建模,并定义其运动学参数,如位置、速度和加速度。
2.添加约束:在ADAMS中,可以通过添加约束来定义物体之间的关系,如连接、限制等。
这些约束可以限制物体的运动方式,从而简化分析过程。
3.定义运动:在ADAMS中,可以通过定义初始条件和施加力来模拟物体的运动。
初始条件可以包括物体的初始位置、速度和加速度,而施加的力可以模拟外部作用力、约束力等。
4.运行仿真:通过设置仿真参数,如仿真时间和步长,来运行仿真模拟。
ADAMS会根据模型和参数进行计算,并输出物体的运动学参数。
5.分析结果:仿真完成后,可以通过ADAMS提供的结果分析工具来查看模拟结果,如位置、速度和加速度等。
ADAMS运动学分析的特点ADAMS作为一款专业的多体动力学仿真软件,具有以下特点:1.精确性:ADAMS采用高精度的求解方法,可以准确地求解物体的运动学方程,从而得到准确的运动学参数。
2.灵活性:ADAMS提供了丰富的建模和约束选项,可以灵活地建立各种复杂的物体模型,并定义各种约束关系。
3.可视化:ADAMS提供了直观的可视化界面,可以对模型进行可视化操作,并实时显示仿真结果。
4.可扩展性:ADAMS支持多种扩展模块和接口,可以与其他CAE软件和编程语言进行集成,方便进行进一步分析和开发。

ADAMS教程很详细手把手教你学会
ADAMS是一款领先的多体动力学仿真软件,广泛应用于机械、航空航天、汽车等领域。
它可以帮助工程师进行产品设计、性能分析、优化等工作。
本文将介绍ADAMS的使用方法,通过详细的手把手教程,让你轻松掌握ADAMS的技术。
接下来,我们需要在模型中添加不同的零部件,比如连接件、传动件等。
通过简单的拖拽操作,将零部件拖放到模型中,并连接它们。
通过设定零部件的属性和参数,可以定制不同的模型。
在模型构建完成后,我们可以进行仿真分析。
点击仿真按钮,ADAMS 将自动计算模型的运动学和动力学特性,得到系统的运动轨迹、力学特性等。
通过对仿真结果的分析,我们可以了解系统的行为和性能。
除了基本的模型构建和仿真分析,ADAMS还提供了优化功能。
通过设定不同的优化目标和约束条件,ADAMS可以自动优化系统设计,使其达到最佳性能。
另外,ADAMS还支持多种输出格式,比如图表、动画等。
我们可以将仿真结果输出为图表,方便进行数据分析;也可以生成动画演示,直观显示系统的运动过程。
总的来说,ADAMS是一款功能强大的多体动力学仿真软件,能帮助工程师进行产品设计和性能分析。
通过本文的手把手教程,相信你已经掌握了ADAMS的基本使用方法,希望你能够在工程设计中充分发挥ADAMS的优势。
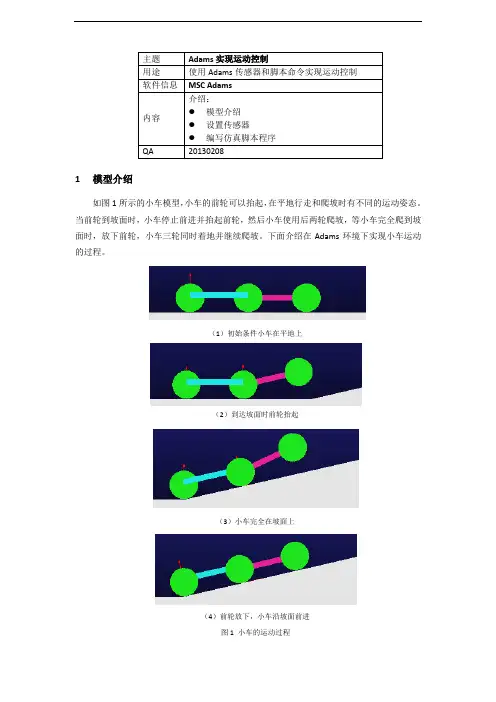
1模型介绍如图1所示的小车模型,小车的前轮可以抬起,在平地行走和爬坡时有不同的运动姿态。
当前轮到坡面时,小车停止前进并抬起前轮,然后小车使用后两轮爬坡,等小车完全爬到坡面时,放下前轮,小车三轮同时着地并继续爬坡。
下面介绍在Adams环境下实现小车运动的过程。
(1)初始条件小车在平地上(2)到达坡面时前轮抬起(3)小车完全在坡面上(4)前轮放下,小车沿坡面前进图1 小车的运动过程在Adams/View界面下建立小车和地面模型,小车中的运动副采用旋转副,车轮与地面采用实体接触,小车施加前进驱动和抬起前轮驱动。
2设置传感器(1)建立测量定义一个测量MEA_disp表示小车前轮到坡面起点的距离,再定义另一个测量MEA_ANGLE表示小车车身与水平面之间的夹角。
为了方便定义,可在地面上增加参考marker 点。
(1)定义距离(2)定义车身角度图2 定义测量(2)定义传感器使用上述定义的测量变量定义距离传感器SENSOR_disp和角度传感器SENSOR_angle,并根据实际模型数据,设置准确的传感器触发数值。
特别注意在Expression文本框中一定输入time,表示该传感器触发时的运行时间值,在下一步的仿真控制脚本中需要用到该时间值。
(1)定义距离传感器SENSOR_disp(2)定义角度传感器SENSOR_angle图3 定义传感器3编写仿真控制脚本使用Adams模拟小车运动的过程是:通过motion驱动小车向前运动,当前轮靠近坡面时,触发距离传感器SENSOR_disp,小车停止向前运动,并使用motion抬起前轮到一定角度,然后小车开始爬坡,当车身与坡面平行时触发角度传感器SENSOR_angle,小车停止爬坡并放下前轮,使三个车轮在同一直线上,之后小车继续爬坡前行。
根据上述过程,在Adams仿真脚本编辑器中输入仿真控制脚本命令,具体如下:SIMULATE/DYNAMIC, DURATION=10.0, DTOUT=1.0E-002DEACTIVATE/SENSOR, ID=1motion/1,function=0motion/2,function=step(time,senval(1),0,senval(1)+0.5,-13d)motion/1,function=-if(time-(senval(1)+0.6):0,60d,60d)SIMULATE/DYNAMIC, DURATION=20.0, DTOUT=1.0E-002DEACTIVATE/SENSOR, ID=2motion/1,function=0motion/2,function=step(time,senval(2),-13d,senval(2)+0.5,-0.5d)motion/1,function=-if(time-(senval(2)+0.6):0,180d,180d)SIMULATE/DYNAMIC, DURATION=10.0, DTOUT=1.0E-002其中senval()函数表示返回传感器触发时的时间值。
ADAMS基础知识讲解1、单位开始时需要为模型设置单位。
在所有的预置单位系统中,时间单位为秒,⾓度为度。
可设置:MMKS--长度千⽶,质量为千克,⼒为⽜顿。
MKS—长度为⽶,质量为千克,⼒为⽜顿。
CGS—长度为厘⽶,质量为克,⼒为达因。
IPS—长度为英⼨,质量为斯勒格(slug),⼒为磅。
2、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将⾃⼰的⽂件存在某⼀⽂件夹下;事实上,在Adams的快捷⽅式上右击⿏标,选属性,再在起始位置上输⼊你想要得路径就可以了。
3、坐标系当第⼀次启动ADAMs/View时,在窗⼝的左下⾓显⽰⼀个三视坐标轴。
该坐标轴为模型数据库的全局坐标系。
缺省情况下,ADAMS/View⽤笛卡⼉坐标系作为全局坐标系。
ADAMS/View将全局坐标系固定在地⾯上。
当创建零件时,ADAMS/View给每个零件分配⼀个坐标系,也就是局部坐标系。
零件的局部坐标系随着零件⼀起移动。
局部坐标系可以⽅便地定义物体的位置。
ADAMS/View也可返回如零件的位置——零件局部坐标系相对于全局坐标系的位移的仿真结果。
局部坐标系使得对物体上的⼏何体和点的描述⽐较⽅便。
物体坐标系不太容易理解。
你可以⾃⼰建⼀个part,通过移动它的位置来体会。
4、物体的位置和⽅向的修改可以有两种途径修改物体的位置和⽅向,⼀种是修改物体的局部坐标系的位置,也就是通过modify物体的position属性;另⼀种⽅法就是修改物体在局部坐标系中的位置,可以通过修改控制物体的关键点来实现。
我感觉这两种⽅法的结果是不同的,但是对于仿真过程来说,物体的位置就是质⼼的位置,所以对于仿真是⼀样的。
5、⽅向的描述对于初学的⼈来说,⽅向的描述不太容易理解。
之前我们都是⽤⽅向余弦之类的量来描述⽅向的。
在ADAMS中,为了求解⽅程时计算的⽅便,使⽤欧拉⾓来描述⽅向。
就是⽤绕坐标轴转过的⾓度来定义。
旋转的旋转轴可以⾃⼰定义,默认使⽤313,也就是先绕Z轴,再绕X轴,再绕Z轴。
基于ADAMS铰接式车辆转向行驶轨迹分析ADAMS是一种广泛应用于机械系统仿真的软件,可以用于车辆动力学和车辆操纵性能的仿真分析。
在车辆行驶轨迹分析中,ADAMS可以模拟铰接式车辆在不同转弯半径、速度和转向角等条件下的行驶轨迹。
本文将基于ADAMS软件,通过铰接式车辆的转向行驶轨迹分析,讨论不同因素对车辆行驶轨迹的影响。
首先,需要建立一个适当的车辆模型。
在ADAMS中,可以使用车辆动力学模块基于其几何参数和物理特性创建车辆模型。
模型应包含车辆的重心位置、轴距、质量分布和轮胎性能等参数。
这些参数将对车辆的行驶轨迹产生显著影响。
其次,需要定义车辆的初始状态和外部条件。
初始状态包括车辆的位置、速度和初始转向角等信息。
外部条件包括路面摩擦系数、转弯半径和转向角速度等。
这些条件将直接影响到车辆的行驶轨迹。
模拟分析车辆的行驶轨迹通常需要先进行静态稳定性分析。
ADAMS提供了相应的分析工具,可以计算车辆在不同转向角度下的侧倾角和侧滑角等参数。
静态稳定性分析的结果有助于评估车辆的稳定性和安全性能。
接下来,可以进行动态行驶轨迹模拟。
在ADAMS中,可以通过输入不同的转向角度和速度参数,模拟车辆在不同转弯半径下的行驶轨迹。
通过观察车辆的行驶轨迹,可以分析车辆的操纵性能和稳定性。
通过对模拟结果的分析,可以得出以下结论:1.车辆的操纵性能受到转弯半径的影响。
较小的转弯半径将导致车辆更为敏捷,但也会增加侧倾和侧滑的风险。
2.车辆的操纵性能受到速度的影响。
较高的速度将增加车辆的稳定性,但也会增加制动距离和操纵难度。
3.车辆的操纵性能受到转向角度的影响。
较大的转向角度将导致车辆更容易转向,但也会增加侧滑和摩擦损失。
4.车辆的操纵性能受到轮胎性能的影响。
具有更高附着力的轮胎将提高车辆的操纵性能和稳定性。
通过ADAMS软件进行铰接式车辆的转向行驶轨迹分析,可以帮助我们评估车辆的操纵性能和稳定性,并优化车辆的设计和操作。
此外,还可以用于开发车载安全系统和驾驶辅助系统,提高车辆的安全性能。
新手上路:ADAMS 基础知识讲解(图文并茂)经过不知道多少个日夜,终于出来一个雏形了,由于时间问题,内容还不全,以后将不断完善,请大家多多支持!内容大纲如下:1.adams软件介绍2.adams学习书籍3.软件安装问题4.常见基础问题4.1一般问题4.2有关齿轮副4.3有关凸轮副4.4蜗轮蜗杆模拟4.5有关行星齿轮传动4.6spline5.常用函数5.1函数总体介绍5.2样条函数:akispl,cubspl5.3step函数5.4IF函数5.5impact与bistop函数5.6gforce和sforce函数5.7sensor,acf的应用6.adams与CAD数据转换6.1proe6.2UG6.3catia6.4solidwork6.5其他CAD软件7.flex相关7.1autoflex8.MA TLAB和ADAMS联合仿真篇一、软件介绍篇ADAMS是Automatic Dynamics Analysis of Mechanical System缩写,为原MDI公司开发的著名虚拟样机软件。
1973年Mr. Michael E. Korybalski取得密西根大学爱娜堡分校(University of Michigan,Ann Arbor)机械工程硕士学历后,受雇于福特汽车担任产品工程师,四年后(1977)与其它等人于美国密执安州爱娜堡镇创立MDI公司(Mechanical Dynamics Inc.)。
密西根大学对ADAMS发展具有密不可分的关系,在ADAMS未成熟前,MDI与密西根大学研究学者开发出2D机构分析软件DRAMS,直到1980年第一套3D机构运动分析系统商品化软件,称为ADAMS。
2002年3月18日MSC.Software公司并购MDI公司,自此ADAMS 并入MSC产品线名称为MSC.ADAMS(本文仍简称ADAMS)。
ADMAS软件由若干模块组成,分为核心模块、功能扩展模块、专业模块、接口模块、工具箱5类,其中核心模块为ADAMS / View——用户界面模块、ADAMS / Solver——求解器和ADAMS/Postprocessor——专用后处理模块。
ADAMS的全面教程ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种用于机械系统动力学分析的软件工具。
它是一个基于事件驱动的多体动力学仿真软件,用于分析和优化各种机械系统的动力学行为。
接下来,我们需要使用约束建模工具将机械系统的各个部分连接起来。
ADAMS提供了丰富的约束条件和约束工具,可以帮助我们定义机械系统的约束条件,如固定连接、滑动连接等。
然后,我们需要对机械系统的元素进行力学建模。
ADAMS提供了各种力学模型,包括质点、刚体、弹性体等。
我们可以通过设置这些模型的质量、惯性等属性来定义机械系统的物理特性。
完成建模后,我们需要定义机械系统的初始条件和加载条件。
初始条件包括初始位置、初始速度等,加载条件包括外部力、电机驱动力等。
通过设置这些条件,可以模拟机械系统在不同工况下的运动行为。
完成建模和条件设置后,我们可以使用ADAMS进行仿真分析。
ADAMS提供了多种仿真分析功能,包括运动仿真、力学仿真等。
我们可以通过设置仿真参数,如仿真时间、时间步长等,进行仿真分析。
在仿真分析过程中,ADAMS会自动计算机械系统的动力学行为,并生成相应的结果。
这些结果包括位移、速度、加速度等,可以帮助我们更好地理解机械系统的动力学特性。
除了仿真分析外,ADAMS还提供了优化分析功能。
我们可以使用ADAMS进行设计优化,通过改变机械系统的参数,如尺寸、材料等,来优化系统的性能。
ADAMS会自动计算出最优参数,并生成相应的优化结果。
此外,ADAMS还提供了结果分析和可视化功能。
我们可以使用ADAMS 的结果分析工具对仿真结果进行统计和分析,如最大位移、最大应力等。
同时,ADAMS还提供了强大的可视化功能,可以将仿真结果以图形、动画等形式进行展示。
总之,ADAMS是一种功能强大的机械系统动力学分析工具。
通过完善的建模工具、仿真分析功能和优化分析功能,它可以帮助工程师们更好地理解机械系统的动力学行为,优化设计,提高性能。
adams 教程Adams 是一款多领域仿真软件,可以在机械、电子、自动化等领域被广泛应用。
这篇教程将带你了解 Adams 的基本使用方法,帮助你快速上手。
安装 Adams首先,你需要下载并安装 Adams 软件。
在安装过程中,确保选择正确的安装路径和软件版本,以及安装所需的附加模块。
创建模型在 Adams 中,可以通过两种方式创建模型:从零开始创建或导入现有的 CAD 模型。
如果选择从零开始创建模型,可以使用 Adams 提供的建模工具,如几何建模、约束设定等。
这些工具允许你通过绘制实体、添加约束等方法创建你所需要的模型。
如果已经有了 CAD 模型,可以直接将其导入到 Adams 中。
Adams 支持多种 CAD 格式,如 STEP、IGES、CATIA、SolidWorks 等。
设置模拟参数在开始仿真之前,需要设置模拟参数。
这些参数包括模拟的时间范围、时间步长、初始条件等。
通过设置这些参数,可以控制仿真的精度和速度。
添加仿真步骤在 Adams 中,仿真被分割为多个步骤。
每个步骤都可以包含不同的载荷条件、约束条件和运动条件。
通过添加和配置这些步骤,可以实现不同的仿真场景。
运行仿真一切准备就绪后,可以开始运行仿真。
通过点击“运行”按钮,Adams 会根据你所设定的参数进行仿真计算,并生成仿真结果。
分析和优化在仿真结束后,可以对仿真结果进行分析和优化。
Adams 提供了多种分析工具,如动力学分析、应力分析、优化算法等。
通过这些工具,可以深入了解系统的行为,并对模型进行优化。
总结通过本教程,你已经了解了 Adams 的基本使用方法。
希望这些知识能帮助你快速上手 Adams 软件,并在实际工程中发挥它的作用。
如需进一步了解,可以查阅 Adams 的官方文档或参考其他相关资源。