基于ADAMS的机械手臂运动仿真分析_李金恒
- 格式:pdf
- 大小:469.25 KB
- 文档页数:4
基于ADAMS的多杆冲压机构运动仿真分析摘要:使用Adams软件可以对多杆机构进行建模和运动仿真分析,同时得出从动件的各类运动参数。
本文建立了一个简化的齿轮多杆冲压机构的模型,进行了运动仿真,对执行机构的重要参数并进行了测量和分析,判断该机构的运动是否满足加工特性,为以后该类机构的设计工作积累经验。
关键词:运动仿真分析;齿轮多杆机构;Adams1引言连杆机构是许多机械上都广泛使用的运动机构。
它的构件运动形式多样,如可实现转动、摆动、移动和平面或空间复杂运动,有着显著的优点如:运动副单位面积所受压力较小,且面接触便于润滑,故磨损减小;制造方便,易获得较高的精度和较大的机械效益等。
故一般的锻压加工,冲压加工,插齿加工等都采用了多杆机构的设计。
本文分析的冲压机构在冲制零件时,冲床模具必须先以较大速度冲击样坯,然后以均匀速度进行挤压成型,模具快速将成品推出型腔,最后,模具以较快速度完成返回行程。
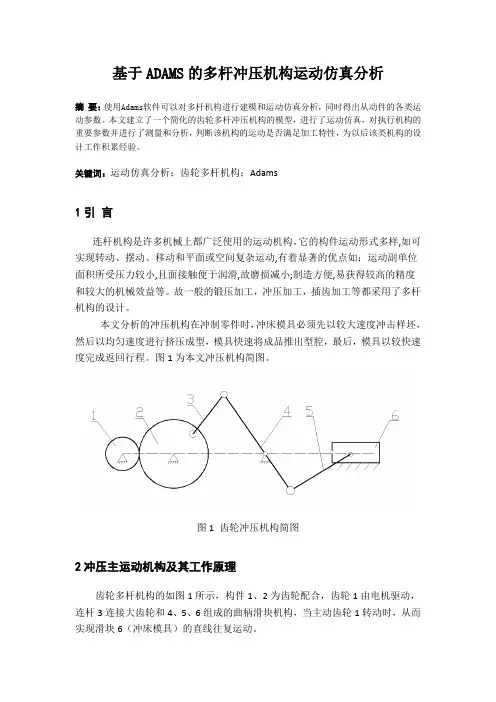
图1为本文冲压机构简图。
图1 齿轮冲压机构简图2冲压主运动机构及其工作原理齿轮多杆机构的如图1所示,构件1、2为齿轮配合,齿轮1由电机驱动,连杆3连接大齿轮和4、5、6组成的曲柄滑块机构,当主动齿轮1转动时,从而实现滑块6(冲床模具)的直线往复运动。
3机构的建模与仿真3.1 建模参数的确定在简图1中,设原动件1匀速转动(m=2,z1=20,w=60r/min),齿轮(2m=2,z2=45),各杆件长度为l3=80mm,l4=150mm,l5=98mm。
3.2模型的建立①通过杆长条件,确立了初始位置的8个点的坐标,通过Adams中的Table Editor写入如图3.1图3.1 初始位置各构件端点坐标写入后的各端点建模如图3.2图3.2 端点位置确定②在POINT_1和POINT_7处分别建立大小齿轮的模型选择Main Toolbox中的圆柱模块,分别以分度圆直径40mm、90mm,厚度10mm建立齿轮模型,选择工具,对其翻转,使其在Front面显示为图3.4。
的多关节机械手手抓部分的其中,nh是约束方程的个数;nc是广义坐标数。
于是可以得到系统速度的约束方程:(4)。
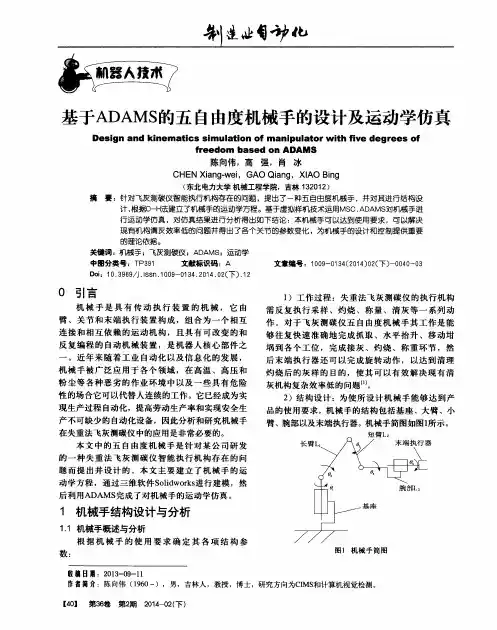
任意时刻t的速度,加速度可以由线性方程的数值方法求解,在ADAMS中通常采用图1 机械手三维装配三维模型的建立虚拟样机的三维模型的建立采用Solid完成,主要包括手抓、底座、大臂机构、小臂机构等,底座上有一电动机带动,实现大臂的转动。
大臂及其小臂的活动主要由液压缸带动,本文重点介绍机械手手抓部分的运动学分析,图2是机械手的三维装配图。
图2 手抓部分装配图立模型过程中遵循的原则。
建立模型之后,导入ADAMS化处理,在满足虚拟样机仿三维模型的建立要尽可能地数量应该尽可能的少,只保留基本的运动部件。
(2)机械手的结构及其分析。
本机械手实现的运动是平均每分钟抓取4次,旋转的角度是是机械手的机构运动简图,电动机带动齿轮转动,实现底座的转动,抓取物料时,由手抓图3 机械手机构运动简图机械手手抓的模型简化及其导入ADAMS中遵循模型的简化原则,将手抓的三维模型简化,模型建立部分使用Solid Edge ST5实现,ADAMA/View提供的Parasolid模型数据交换接口,将模ADAMS软件中。
导入后为模型的每个零件重命名和添加材料属性(steel)。
鉴于本文只研究机械手手抓部分的运动,故将删除了模型中与小臂链接的链接底座、前后缸盖以及套筒等的结构,完成简化后,为了使各个相对运动的部分形成有机的整体,根据构件之间相对运动,在模型中的利用ADAMS/View中的约束工具为各个构件之间引入约束。
图为导入ADAMS后的模型图。
图4 手抓简化仿真模型机械手手抓部分的仿真 机械手的手抓部分是机械手设计的重要部分,也是实现机械工作的必要条件,设计的目的是机械手每分钟中国设备工程 2024.04(下)图5 机械手手抓部分约束的添加机械手的整个驱动部分选用气压驱动,其中包括大小臂的运动以及手抓的张合,液压驱动最大优点是单位质量输出功率大,因为液压传动的动力元件可以达到很高的工作压力,在同等输出功率下具有体积小、质量轻、运动惯性小、动态性能好的特点。
基于ADAMS的机械四连杆机构运动仿真分析1. 引言1.1 背景介绍机械四连杆机构是一种常见的机械系统,由四个连杆组成,通过铰链连接在一起。
该机构具有简单结构、运动灵活等特点,广泛应用于工程领域中的机械传动系统、转动机械装置等。
随着现代工程技术的发展,人们对机械四连杆机构的运动性能和工作特性提出了更高的要求。
利用ADAMS软件进行机械四连杆机构的运动仿真分析已成为一种常用的研究方法。
通过仿真分析,可以全面地了解机构在不同工况下的运动规律和性能特点,为设计优化和故障分析提供重要依据。
1.2 研究目的本文旨在利用ADAMS软件对机械四连杆机构进行运动仿真分析,探讨其运动规律及特性。
通过建立机构的数学模型,模拟机构在不同工况下的运动状态,分析机构的运动学性能和动力学特性,为设计优化提供理论支持。
借助ADAMS软件的功能,对机构进行参数优化,使机构的性能达到最佳状态。
本文研究的目的包括:1. 分析机械四连杆机构的运动规律,揭示其运动特性;2. 探讨机构在不同工况下的运动状态和特点,评估机构的性能;3. 基于仿真结果,进行参数优化,提高机构的工作效率和稳定性;4. 对机构可能出现的故障进行分析,为机构的维护和保养提供参考。
通过对机械四连杆机构的运动仿真分析,旨在为机械工程师提供设计和优化机构的参考,促进机械系统的创新和发展。
1.3 研究方法研究方法是本文的关键部分,主要包括以下几个步骤:(1)了解ADAMS软件的基本原理和使用方法,包括建模、设置参数、运动仿真等操作。
(2)建立四连杆机构的三维模型,并根据实际情况设置各个连杆的长度、质量、摩擦系数等参数。
(3)设定机构的初始条件和约束条件,如应用驱动力、初始速度、固定关节等,以模拟机构的运动过程。
(4)进行仿真分析,观察四连杆机构在不同驱动力、摩擦系数下的运动情况,包括角速度、位移、加速度等参数的变化。
(5)分析和比较仿真结果,探讨四连杆机构运动特性的影响因素,如摩擦力、驱动力大小、连杆长度等,并对结果进行合理解释。
基于ADAMS的机械四连杆机构运动仿真分析机械四连杆机构是一种常用的机构形式,它广泛应用于各种机械设备中,如汽车发动机、机床、机器人和机械手等。
本文基于ADAMS软件,对机械四连杆机构进行运动仿真分析,并对仿真结果进行分析和讨论。
一、ADAMS软件介绍ADAMS是一款专门用于多体动力学仿真分析的商业软件,它可以用来仿真各种机械系统的动力学特性,包括车辆、飞机、机器人以及各种机械机构等,还可以分析机构的运动轨迹、速度、加速度、力矩等参数。
在本文中,我们将利用ADAMS软件对机械四连杆机构进行仿真分析,探究机构的运动规律和特性。
二、机械四连杆机构的结构和运动特性机械四连杆机构由四个连杆组成,其中两个连杆为机构的输入和输出轴,另外两个连杆则起到连接作用。
机构的结构如图1所示。
图1 机械四连杆机构结构示意图机械四连杆机构的运动特性与其连杆长度、角度以及连接方式等因素密切相关,下面我们将对机构的运动特性进行详细的分析。
1. 运动自由度机械四连杆机构的运动自由度为1,即只有一维平动或旋转方向。
2. 平衡性机械四连杆机构具有良好的平衡性,可以在很大程度上减小机构的惯性力,提高机构的稳定性。
3. 运动规律机械四连杆机构的运动规律比较复杂,难以用解析方法进行求解。
通常采用动力学仿真和实验方法,对机构的运动规律进行研究和分析。
为了探究机械四连杆机构的运动规律和特性,我们利用ADAMS软件对机构进行仿真分析。
仿真模型如图2所示。
在仿真过程中,我们可以通过改变机构的输入参数,如连杆长度、连杆角度等,来观察机构的运动规律和特性。
下面我们将举例说明。
1. 连杆长度变化时机构的运动规律改变机构的输入连杆长度,可以观察到机构的运动规律发生了显著的变化。
当输入连杆长度L1=100mm、L2=200mm时,机构的运动规律如图3所示。
图3 机构运动规律图(L1=100mm、L2=200mm)从图3中可以看出,当输入连杆开始旋转时,机构的输出连杆也随之旋转,但是旋转速度比输入连杆慢,这是由于机构的连杆长度不同,导致机构的角度运动不同所致。
基于ADAMS的机械臂仿真分析作者:张衡来源:《科技资讯》2018年第21期摘要:本文利用ADAMS/View模块对液压机械臂的虚拟样机机械系统进行仿真,尤其针对其液压机械臂机械手的转角进行针对性分析,并进行结构优化设计,得出最优解,并将最优解参数导入程序进行仿真分析,给出优化建议,使其转动角范围符合各种工况需求。
同时对机械臂姿态调整液压缸进行了受力仿真分析,并给出了液压机械手姿态调整杆最佳连接位置,为之后的选型和设计工作奠定了理论基础。
关键词:ADAMS 仿真分析机械设计中图分类号:TP241 文献标识码:A 文章编号:1672-3791(2018)07(c)-0076-02近年来,功能多样,高效的机械臂在工业生产渐渐普及,它的普及促进了工业生产向着自动化和智能化方向发展。
该行业的国产化还存在较多问题,产品标准不统一,使用批量小,个配件的兼容性通用性差,生产装配效率低,且成本较高,并且在可靠性方面还有很大改进空间。
以上种种问题是我们研究的动力和努力的方向。
本文主要在ADAMS 动力学仿真软件中建立液压驱动机械臂虚拟样机系统。
利用该系统,针对柔性液压机械臂的工作范围进行运动学仿真分析。
1 ADAMS软件的应用1.1 软件简介ADAMS (Automatic Dynamic Analysis of Mechanical Systems)是属于MSC公司的一款模拟器仿真软件,应用于全球各大厂商中,占机械系统动态仿真软件市场份额的51%。
工程设计人员使用ADAMS在计算机上建立和模拟仿真样机,对机械可进行虚拟再现模拟,可以让设计人员知道其设计的机械系统的运动性能。
在运动学和动力学仿真领域,ADAMS是目前国际上应用最广泛模拟电脑软件之一。
1.2 设计流程(1)构建组件(建立组件,设立应用条件,对施加的进行设计)建立系统的模型包括设立组件,然后将约束条件作用于组件并定义作用于它们的力。
设计的机械组成中,其组件是具有物理特性的几何形状,如质量和转动惯量。
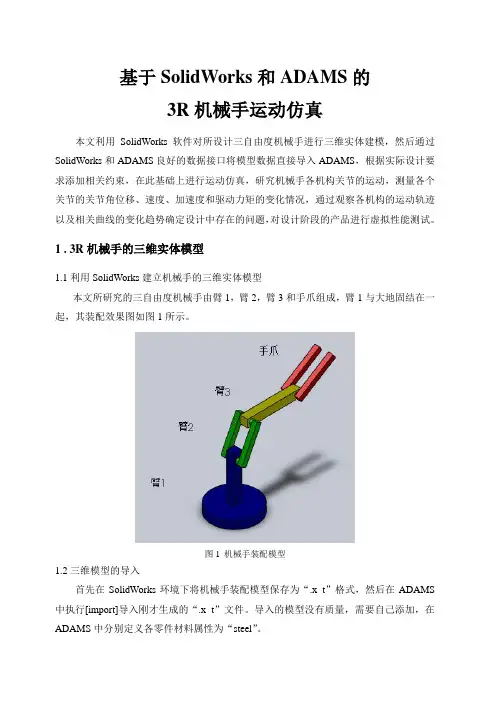
基于SolidWorks和ADAMS的3R机械手运动仿真本文利用SolidWorks软件对所设计三自由度机械手进行三维实体建模,然后通过SolidWorks和ADAMS良好的数据接口将模型数据直接导入ADAMS,根据实际设计要求添加相关约束,在此基础上进行运动仿真,研究机械手各机构关节的运动,测量各个关节的关节角位移、速度、加速度和驱动力矩的变化情况,通过观察各机构的运动轨迹以及相关曲线的变化趋势确定设计中存在的问题,对设计阶段的产品进行虚拟性能测试。
1 . 3R机械手的三维实体模型1.1利用SolidWorks建立机械手的三维实体模型本文所研究的三自由度机械手由臂1,臂2,臂3和手爪组成,臂1与大地固结在一起,其装配效果图如图1所示。
图1 机械手装配模型1.2三维模型的导入首先在SolidWorks环境下将机械手装配模型保存为“.x_t”格式,然后在ADAMS 中执行[import]导入刚才生成的“.x_t”文件。
导入的模型没有质量,需要自己添加,在ADAMS中分别定义各零件材料属性为“steel”。
2 . ADAMS运动仿真机械手在运动过程中要尽量平滑、平稳,否则会产生机械部件的磨损加剧,并导致机械手的振动和冲击。
因此在仿真过程中测量各个关节的关节角位移、速度、角加速度和驱动力矩的变化情况。
将模型各零部件导入ADAMS软件中后,各个构件之间还没有任何的约束,模型只是提供了各构件的初始位置。
本机械手两两相邻的构件构成的三个关节都是转动关节,均定义为旋转副,底座与大地之间定义为固定副。
添加完约束后的模型如图2所示。
图2 ADAMS环境下机械手仿真模型本文为机械手设置运动路径,已知路径求解各关节的驱动和力矩和转角运动情况。
设图中球的运动角速度如下图3:图3 球的运动角速度设定添加一个运动平面,设定机械手完成上料过程,现设路径如下图4,图4 机械手的运动轨迹至此建立起了机械手完整仿真模型,然后进行5s、50步的仿真。

作者简介:李兆安,男,硕士,研究方向:工程机械结构优化。
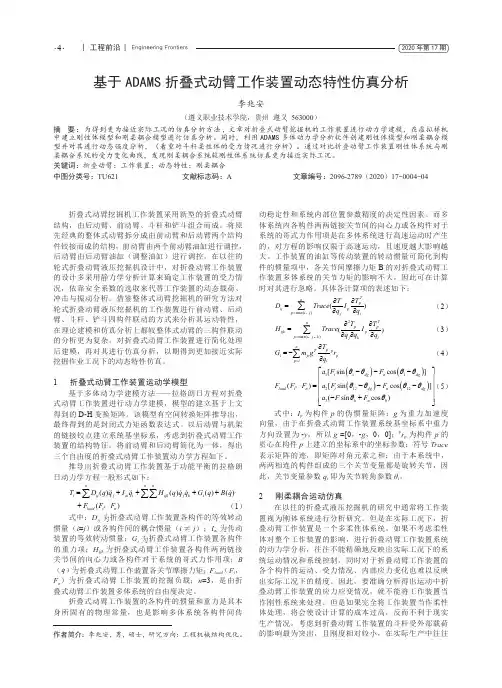
基于ADAMS 折叠式动臂工作装置动态特性仿真分析李兆安(遵义职业技术学院,贵州 遵义 563000)摘 要:为得到更为接近实际工况的仿真分析方法,文章对折叠式动臂挖掘机的工作装置进行动力学建模,在虚拟样机中建立刚性体模型和刚柔耦合模型进行仿真分析。
同时,利用ADAMS 多体动力学分析软件创建刚性体模型和刚柔耦合模型并对其进行动态强度分析,(着重对斗杆柔性体的受力情况进行分析)。
通过对比折叠动臂工作装置刚性体系统与刚柔耦合系统的受力变化曲线,发现刚柔耦合系统较刚性体系统仿真更为接近实际工况。
关键词:折叠动臂;工作装置;动态特性;刚柔耦合中图分类号:TU621 文献标志码:A 文章编号:2096-2789(2020)17-0004-04折叠式动臂挖掘机工作装置采用新型的折叠式动臂结构,由后动臂、前动臂、斗杆和铲斗组合而成。
将原先经典的整体式动臂拆分成由前动臂和后动臂两个结构件铰接而成的结构,前动臂由两个前动臂油缸进行调控,后动臂由后动臂油缸(调整油缸)进行调控。
在以往的轮式折叠动臂液压挖掘机设计中,对折叠动臂工作装置的设计多采用静力学分析计算来确定工作装置的受力情况,依靠安全系数的选取来代替工作装置的动态载荷、冲击与振动分析。
借鉴整体式动臂挖掘机的研究方法对轮式折叠动臂液压挖掘机的工作装置进行前动臂、后动臂、斗杆、铲斗四构件联动的方式来分析其运动特性,在理论建模和仿真分析上都较整体式动臂的三构件联动的分析更为复杂。
对折叠式动臂工作装置进行简化处理后建模,再对其进行仿真分析,以期得到更加接近实际挖掘作业工况下的动态特性仿真。
1 折叠式动臂工作装置运动学模型基于多体动力学建模方法—拉格朗日方程对折叠式动臂工作装置进行动力学建模,模型的建立基于上文得到的D-H 变换矩阵。
该模型有空间转换矩阵推导出,最终得到的是封闭式力矩函数表达式。
以后动臂与机架的链接铰点建立系统基坐标系,考虑到折叠式动臂工作装置的结构特征,将前动臂和后动臂简化为一体,得出三个自由度的折叠式动臂工作装置动力学方程如下。
基于ADAMS的机械四连杆机构运动仿真分析1.引言机械四连杆机构是一种常见的机械结构,它由四个连杆组成,通过转动连接在一起,能够实现复杂的运动。
对于这种机构的运动行为进行仿真分析,可以帮助工程师们更好地理解其工作原理和性能特点,为设计优化和控制提供可靠的理论基础。
本文将介绍基于ADAMS的机械四连杆机构运动仿真分析的方法和结果,以期为相关领域的研究和应用提供参考。
2.问题描述机械四连杆机构的运动仿真分析主要涉及以下几个问题:首先是机构的运动学特性,包括连杆的运动轨迹、角度、速度和加速度等;其次是机构的力学特性,包括连杆的受力情况、驱动力和阻力等;最后是机构的动力学特性,包括连杆的动力学模型、运动过程中的能量转换和损耗等。
通过分析这些问题,可以全面了解机械四连杆机构的运动规律和工作性能,为相关工程设计和控制优化提供重要参考。
3.基于ADAMS的机械四连杆机构运动仿真分析方法ADAMS(Adams Dynamics)是一款专业的多体动力学仿真软件,可以对多体机械系统的运动行为进行模拟和分析。
基于ADAMS的机械四连杆机构运动仿真分析主要包括以下几个步骤:建立模型、设定运动和约束条件、进行仿真计算、分析结果并优化设计。
3.1 建立模型首先需要在ADAMS软件中建立机械四连杆机构的三维模型,包括连杆、连接点、驱动装置等。
通过软件提供的建模工具,可以简单快速地绘制出机构的几何结构,并添加材料、质量、惯性等物理属性,为后续的仿真计算做好准备。
3.2 设定运动和约束条件在建立好模型后,需要设定机械四连杆机构的运动和约束条件。
通过ADAMS软件提供的运动学分析工具,可以简单地定义连杆的转动角度、线速度和角速度等运动参数,同时添加约束条件,限制机构的运动范围和姿态,以保证仿真计算的准确性和可靠性。
3.3 进行仿真计算设定好运动和约束条件后,即可进行仿真计算。
ADAMS软件提供了理想化模拟和实验数据验证两种仿真方式,可以根据需求选择合适的方法进行计算。
基于ADAMS的机械四连杆机构运动仿真分析ADAMS(Automatic Dynamic Analysis of Mechanical Systems)是一种常用的机械系统模型动力学仿真软件,通过ADAMS可以对机械系统的运动进行仿真分析。
机械四连杆机构是一种常用的运动转换机构,在机械工程领域中应用广泛。
本文将基于ADAMS对机械四连杆机构进行运动仿真分析,以探究其运动特性。
需要建立机械四连杆机构的模型。
在ADAMS软件中,可以通过建模工具箱进行模型建立。
选择合适的零件进行建模,并定义零件之间的连接关系和运动约束。
根据机械四连杆机构的特点,需要定义四个铰链关节来连接相邻的零件,同时需要设置运动约束以模拟四连杆的运动。
接下来,需要给机械四连杆机构添加驱动器。
驱动器可以模拟对机构施加的力或运动,用以驱动整个系统的运动。
在ADAMS中,可以选择合适的驱动器类型,并设置合适的输入参数。
在机械四连杆机构中,可以选择驱动轮或驱动杆等进行驱动。
然后,进行仿真参数设置。
在ADAMS中,可以设置仿真的时间范围、步长和求解器等参数。
根据需要,可以设置合适的仿真参数,以保证仿真的精度和效率。
完成仿真参数设置后,就可以进行运动仿真分析了。
点击仿真按钮,ADAMS将自动进行仿真计算,并以图形和数值的形式显示仿真结果。
可以通过仿真结果来分析机械四连杆机构的运动特性,包括角位移、角速度和角加速度等。
在分析机械四连杆机构的运动特性时,可以通过改变机构参数或驱动器参数来进行参数分析。
通过调整参数,可以得到不同情况下的运动特性,并进行比较分析,以评估机构的性能和优化设计。
通过ADAMS进行机械四连杆机构的运动仿真分析可以帮助工程师深入了解机构的运动特性,优化设计,提高机构的性能和效率。
ADAMS提供了丰富的建模工具箱和仿真参数设置,使得仿真分析更加方便和准确。
通过仿真分析,可以为机械四连杆机构的设计和优化提供有效的参考和指导。
基于ADAMS的机械四连杆机构运动仿真分析摘要:本文利用ADAMS软件对机械四连杆机构进行了运动仿真分析,通过对其运动性能、力学特性等方面的研究,为机械设计提供了理论基础和技术支持。
1.引言机械四连杆机构是一种常用的传动机构,在机械设计中起着重要作用。
其特点是结构简单、运动稳定、传动精度高,被广泛应用于各种机械装置中。
为了提高机械产品的设计效率和性能,需要对四连杆机构的运动特性进行充分分析和优化。
ADAMS软件是一种专业的运动仿真分析工具,可以对机械系统的运动行为进行较为精确的模拟和分析,具有很高的应用价值。
本文将利用ADAMS软件对机械四连杆机构进行运动仿真分析,以期为机械设计提供理论基础和技术支持。
2.机械四连杆机构的结构和原理机械四连杆机构是一种由四个连杆组成的传动机构,其结构简单,由四个连杆和四个铰链连接而成。
四连杆机构可以将输入运动转换为输出运动,并且通过连杆长度的设计可以调节输出运动的幅度和速度,具有广泛的应用价值。
机械四连杆机构的原理是通过各个连杆的相对运动,使得输出连杆实现期望的运动轨迹,并且不同的连杆长度和铰链布置可以实现不同的运动方式。
3.ADAMS软件的运动仿真分析ADAMS(Automatic Dynamic Analysis of Mechanical Systems)软件是由美国麻省理工学院研发的一款专业的机械系统运动仿真分析工具,具有较高的精度和可靠性。
其建模简便,求解速度快,可以对机械系统的运动行为进行较为真实的模拟和分析。
利用ADAMS 软件可以实现对机械系统的运动学和动力学分析,可以得到系统的速度、加速度、力学特性等参数,为机械设计提供重要参考依据。
4.基于ADAMS的机械四连杆机构建模在ADAMS软件中建模机械四连杆机构,首先需要对其结构进行建模,包括连杆、铰链的参数化等。
其次对各个连杆和铰链的连接关系进行建立,可以根据实际情况进行参数化调整。
最后对系统施加输入运动条件,并设置输出参数,以便进行仿真分析。
毕业论文(设计)题目基于ADAMS和MATLAB的六自由度机械手运动仿真系部机械工程系专业年级学生姓名学号指导教师手术机器人的运动仿真机械设计制造及其自动化学生指导老师【摘要】:首先进行了背景知识的学习,包括手术机械手基本知识的了解,明确了手术机械手的应用环境,国内外研究趋势,以及手术机械手中主要涉及的关键技术。
学习了有关虚拟样机的知识,了解了各种仿真软件的优劣,最终确定了采用ADAMS进行仿真分析。
学习仿真软件ADAMS。
通过实际操作ADAMS软件,并进行大量的实例练习,对软件能熟练的使用,然后查阅相关资料,明确使用该软件要达到的最终目的,并确定方法。
建立仿真模型。
对本文所使用的机器人的结构进行详细了解,并在Solid Works软件中建立出机器人的各个零件的三维模型,并在Solid Works环境中进行了装配,检查了装配结果。
然后查阅资料,了解Solid Works与ADAMS软件之间的数据是如何传输的,并确定本文所使用的传输方法。
在仿真软件中处理模型。
将模型导入仿真软件中,对其进行相应的处理,进行了修改质量、添加约束等,然后创建驱动函数等操作,最后验证仿真模型。
为仿真做好准备。
仿真运行及数据测量分析。
在软件中对机器人进行仿真,并测出其运动特性曲线,并对曲线进行分析。
进行了论文写作。
【关键字】:机械手仿真 ADAMS SOLIDWORKSDigital Dual-Longitudinal Mode LaserThermal Frequency Stabilization Circuit Design【Abstract】:First, the background knowledge for learning, including basic knowledge of surgical robot to understand clearly the surgical robot to be With the environment, domestic and international research trends, and the surgical robot mainly related to key technologies. Learning to know about the virtual prototype Knowledge, understanding the advantages and disadvantages of various simulation software, and ultimately determine the use of ADAMS simulation analysis. Learning simulation software ADAMS. ADAMS software through hands-on and a lot of instances of practice, the use of software proficiency, and access to relevant information, Explicitly use the software to achieve the ultimate goal, and identify methods. Build simulation models. Robot used in this article the knot Detailed understanding of structure, and Solid Works software to create the robot in various parts of the three-dimensional model, and in the Solid Works environment was assembled to check the assembly results. And access to information, understanding between Solid Works and ADAMS, How the data is transmitted, and to determine the transmission method used in this article. Processing model in the simulation software. The model into simulation Fax software and to carry out the appropriate treatment, were revised quality, add constraints, and then create the drive functions and other operations, Finally, simulation model validation. Ready for simulation. Simulation run and the data measurement and analysis. In the software simulation of the robot True, and measure its movement characteristic curve, and curve analysis. Conducted a thesis writing.【Key words】: robot simulation ADAMS SOLIDWORKS目录1.绪论 (1)1.1.研究背景 (1)1.2.研究意义 (2)1.3.研究内容 (2)2.虚拟样机技术 (4)2.1.虚拟样机技术的内容 (4)2.2.虚拟样机技术与传统CAX(CAD/CAE/CAM)技术的比较 (5)2.3.虚拟样机技术的应用 (6)3.ADAMS软件 (8)3.1.ADAMS的功能概述 (8)3.1.1.ADAMS 的一些主要模块 (8)3.1.2.ADAMS建模、仿真步骤 (9)3.2.ADAMS的建模功能 (10)3.2.1.ADAMS中的零件 (10)3.2.2.在零件上施加约束和运动 (11)3.2.3.给零件施加作用力 (12)3.3.ADAMS的分析功能 (12)3.3.1.ADAMS中的测量 (12)3.3.2.系统元素和数据元素 (13)3.3.3.用ADAMS对模型进行仿真 (13)4.机械手三维模型建立 (15)4.1.SW概述 (15)4.2.机械手零件建模 (15)4.3.机械手装配 (19)4.4.SW与ADAMS数据传递 (21)5.基于ADAMS的仿真分析 (23)5.1.导入机器人模型及设置工作环境 (23)5.1.1.导入机器人模型 (23)5.1.2 设置工作环境 (24)5.2.修改机器人模型的材料、颜色、名称及验证模型 (26)5.2.1.修改机器人模型的材料 (26)5.2.2.修改机器人各构件的颜色及名称 (26)5.2.3.检查模型 (28)5.3.创建约束及驱动 (28)5.3.1.创建约束 (28)5.3.2.创建驱动 (31)5.4.验证模型 (32)5.5.仿真控制 (33)5.6.运动学仿真 (34)5.6.1.仿真过程及机器人末端的运动轨迹 (34)5.6.2.机器人末端点的测量 (35)6.结论与展望 (38)参考文献 (40)致谢 (41)1.绪论1.1.研究背景机器人技术是一种综合了机械工程、电子工程、计算机技术、自动控制及人工智能等多种科学最新研究成果的综合性技术,是机电一体化技术发展进步的典型代表。
基于Adams的三自由度Delta机械手的运动学仿真分析作者:伍经纹徐世许王鹏宋婷婷来源:《软件》2017年第06期引言机器人技术发展给传统的工业带来了巨大的变化,大大的提高了社会生产力水平。
现代工业生产中运用的工业机器人大致可以分为串联工业机器人和并联工业机器人和混联工业机器人。
最典型的并联机器人是Delta机器人,它是由R.Clavel博士于1985年提出的。
其中,三自由度的Delta并联机械手具有刚度大,承载能力强、重量轻、体积小、定位精确、效率高等特点,在包装、分拣、轻量搬运等生产工序中得到广泛应用。
现如今为适应越来越苛刻的产品质量要求,大幅度提高企业效率,国内外各大机器人制造厂商分别制造出各自的Delta机器人。
Delta并联机器人呈现出高速高精、灵活性等方向的发展趋势[。
但值得指出的是,尽管近些年来不断涌现出结构特点鲜明的并联机器人样机,但与串联机构的产业化水平相比,并联机械手还存在较大差距。
究其根本原因,控制层面研究成果的缺乏很大程度上影响了并联机械手的工作性能,阻碍和限制了该类机械手在工业中的前景。
目前对Delta机械手在轨迹规划、控制策略方面还不够成熟导致机械手运动过程出现剧烈震动,使得机械手的使用寿命降低,增加企业成本。
通过对运动轨迹和路径合理规划,可以提高机械手的效率、稳定性、可靠性,延长使用的寿命。
因此本文采用改进修正梯形加速度的方法在笛卡尔坐标系下进行轨迹规划、采用虚拟样机ADAMS软件进行运动仿真获得结论。
1Delta机械手运动学1.1Delta机械手的数学模型Delta机械手有三个平动自由度,建立数学模型如图1所示,分别以等边三角形AClC2C3中心O和AAlA2A3中心0建立静平台坐标系O-XYZ和动平台坐标系o-xyz。
其中,x轴沿着主动臂C1B1方向建立,z轴与静平台垂直并指向上,Y轴的方向根据右手定则确定。
动平台坐标系的建立同理。
机械手的主要参数有主动臂长度,从动臂长度为,静平台外接圆半径为R,即动平台外接圆半径为相互之间夹角为e=120°,静平台与主动臂之间的夹角。