ADAMS系统测量与仿真和仿真后处理
- 格式:ppt
- 大小:795.00 KB
- 文档页数:45
基于ADAMS的悬架系统动力学仿真分析与优化设计一、概述本文以悬架系统为研究对象,运用多体动力学理论和软件,从新车型开发中悬架系统优化选型的角度,对悬架系统进行了运动学动力学仿真,旨在研究悬架系统对整车操纵稳定性和平顺性的影响。
文章提出了建立悬架快速开发系统平台的构想,并以新车型开发中的悬架系统优化选型作为实例进行阐述。
简要介绍了汽车悬架系统的基本组成和设计要求。
概述了多体动力学理论,并介绍了利用ADAMS软件进行运动学、静力学、动力学分析的理论基础。
基于ADAMSCar模块,分别建立了麦弗逊式和双横臂式两种前悬架子系统,多连杆式和拖曳式两种后悬架子系统,以及建立整车模型所需要的转向系、轮胎、横向稳定杆等子系统,根据仿真要求装配不同方案的整车仿真模型。
通过仿真分析,研究了悬架系统在左右车轮上下跳动时的车轮定位参数和制动点头量、加速抬头量的变化规律,以及汽车侧倾运动时悬架刚度、侧倾刚度、侧倾中心高度等侧倾参数的变化规律,从而对前后悬架系统进行初步评估。
1. 悬架系统的重要性及其在车辆动力学中的作用悬架系统是车辆的重要组成部分,对车辆的整体性能有着至关重要的作用。
它负责连接车轮与车身,不仅支撑着车身的重量,还承受着来自路面的各种冲击和振动。
悬架系统的主要功能包括:提供稳定的乘坐舒适性,保持车轮与路面的良好接触,以确保轮胎的附着力,以及控制车辆的姿态和行驶稳定性。
在车辆动力学中,悬架系统扮演着调节和缓冲的角色。
当车辆行驶在不平坦的路面上时,悬架系统通过其内部的弹性元件和阻尼元件,吸收并减少来自路面的冲击和振动,从而保持车身的平稳,提高乘坐的舒适性。
同时,悬架系统还能够根据车辆的行驶状态和路面的变化,自动调节车轮与车身的相对位置,确保车轮始终与路面保持最佳的接触状态,以提供足够的附着力。
悬架系统还对车辆的操控性和稳定性有着直接的影响。
通过合理的悬架设计,可以有效地改善车辆的操控性能,使驾驶员能够更加准确地感受到车辆的行驶状态,从而做出更为精确的操控动作。
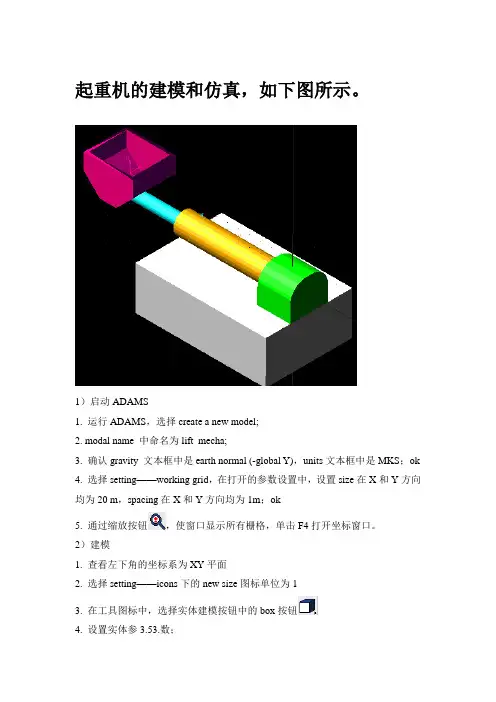
起重机的建模和仿真,如下图所示。
1)启动ADAMS1. 运行ADAMS,选择create a new model;2. modal name 中命名为lift_mecha;3. 确认gravity 文本框中是earth normal (-global Y),units文本框中是MKS;ok4. 选择setting——working grid,在打开的参数设置中,设置size在X和Y方向均为20 m,spacing在X和Y方向均为1m;ok5. 通过缩放按钮,使窗口显示所有栅格,单击F4打开坐标窗口。
2)建模1. 查看左下角的坐标系为XY平面2. 选择setting——icons下的new size图标单位为13. 在工具图标中,选择实体建模按钮中的box按钮4. 设置实体参3.53.数;On ground Length :12Height:4Depth:85. 鼠标点击屏幕上中心坐标处,建立基座部分6. 继续box建立Mount座架部件,设置参数:New partLength :3Height:3Depth: 3.5设置完毕,在基座右上角建立座架Mount部件7. 左键点击立体视角按钮,查看模型,座架Mount不在基座中间,调整座架到基座中间部位:①右键选择主工具箱中的position按钮图标中的move按钮②在打开的参数设置对话框中选择Vector,Distance项中输入3m,实现Mount 移至基座中间位置③设置完毕,选择座架实体,移动方向箭头按Z轴方向,Distance项中输入2.25m,完成座架的移动右键选择座架,在快捷菜单中选择rename,命名为Mount8. 选择setting—working grid 打开栅格设置对话框,在set location中,选择pick 选择Mount.cm座架质心,并选择X轴和Y轴方向,选择完毕,栅格位于座架中心选择主工具箱中的视角按钮,观察视图将spacing—working grid ,设置spacing中X和Y均为0.510. 选择圆柱实体绘图按钮,设置参数:New partLength:10mRadius:1m选择座架的中心点,点击左侧确定轴肩方向,建立轴肩,单击三维视图按钮,观察视图11. 继续圆柱工具,绘制悬臂①设置参数:New partLength: 13mRadius: 0.5m②选择Mount.cm作为创建点,方向同轴肩,建立悬臂③右键选择新建的悬臂,在快捷菜单中选择part_4——Rename,命名为boom④选择悬臂,移动方向沿X轴负向,实现悬臂的向左移动:1)右键选择工具箱中的position按钮中的move按钮2)在打开的参数对话框中,选择vector,distance中输入2m,点击悬臂,实现移动⑤右键点击实体建模按钮,在弹出的下一级菜单中选择导圆角工具,设置圆角半径为1.5m⑥左键选择座架上侧的两条边,点击右键,完成倒角12. 选择box按钮图标,创建铲斗①设置参数:New partLength : 4.5Height: 3.0Depth: 4.0②选择悬臂左侧中心点,命名为bucket,建立铲斗③右键选择position按钮下一级按钮move按钮④在打开的参数对话框中,选择vector,distance中输入2.25m,选择铲斗,移动方向沿全部坐标系X轴负方向,实现铲斗的横向移动⑤在主工具箱中,选择三维视图按钮,察看铲斗⑥继续选择move按钮,设置参数中选择vector,distance中输入2.0m,选择铲斗,移动方向沿全部坐标系 Z轴负方向,实现铲斗的纵向移动⑦移动完毕,选择主工具箱中的渲染按钮render,察看三维实体效果,再次选择render按钮,实体图则以线框显示⑧右键点击实体建模按钮,再弹出的下一级按钮中选择倒角工具,在打开的参数设置对话框中,设置倒角Width为1.5m,⑨选择铲斗下侧的两条边,完毕单击右键,完成倒角⑩右键选择实体建模工具按钮,再下一级按钮中选择Hollow按钮,在打开的参数设置对话框中设置参数Thickness为0.25m选择铲斗为挖空对象,铲斗上平面为工作平面,完毕点击右键挖空铲斗3)添加约束根据图示关系,添加链接①在主工具箱中,选择转动副,下方的参数设置对话框中,设置参数 2 bod——1 loc和pick feature②选择基座和座架,然后选择座架中心Mount.cm,旋转轴沿y轴正向,建立座架与基座的转动副③继续用转动副按钮,建立轴肩与座架间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择轴肩和座架,再选择座架中心点,建立转动副④继续用转动副按钮,建立铲斗与悬臂间的转动副,设置参数为2 bod——1 loc 和Normal to grid,选择铲斗与悬臂,再选择铲斗下侧中心点,建立转动副⑤选择主工具箱中的平动副,设置参数2 bod——1 loc和pick feature,选择悬臂与轴肩,再选择悬臂中心标记点,移动方向沿X轴正方向,建立悬臂和轴肩间的平动副⑥右键点击窗口右下角的Information 信息按钮,选择约束按钮,观察是否按要求施加约束,关闭信息窗口⑦检查完毕,选择仿真按钮,对系统进行仿真,观察系统在重力作用下的运动4)添加运动①选择主工具箱中的旋转运动按钮,右键点击座架中心标记点,在弹出的选择窗口中,选择JOINT_mount_ground,给座驾与基座的转动副添加转动运动②选择俯视图按钮,观察旋转运动副的箭头图标③右键点击该运动,在弹出的快捷菜单中选择motion_mount_ground——modify在修改对话框中,修改function项为360d*time④重复上述动作,在轴肩和座架之间建立旋转运动Motion_shoulder_ground,⑤右键点击该运动,在弹出的快捷菜单中选择motion_shoulder_ground——modify在修改对话框中,修改function项为-STEP(time,0,0,0.10,30d)⑥重复上述动作,在铲斗和悬臂之间建立旋转运动Motion_bucket_boom⑦设置运动函数为45d*(1-cos(360d*time))⑧右键点击主工具箱中旋转运动按钮,选择下一级平行运动按钮,点击悬臂中心平动副,在悬臂和座架间建立平行运动⑨设置平行运动函数为STEP(time,0.8,0,1,5)⑩选择主工具箱中的仿真按钮,设置仿真参数END Time:1;Steps:100,进行仿真5)测量和后处理①鼠标右键点击铲斗,打开右键快捷键,选择测量measure②系统打开参数设置对话框,将Characteristic设置为CM Point,Component 设置为Y,测量Y向位移。
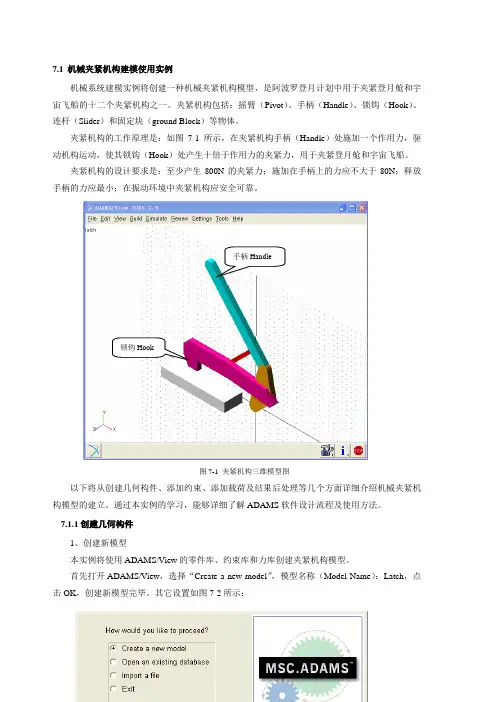
7.1机械夹紧机构建模使用实例机械系统建模实例将创建一种机械夹紧机构模型,是阿波罗登月计划中用于夹紧登月舱和宇宙飞船的十二个夹紧机构之一。
夹紧机构包括:摇臂(Pivot)、手柄(Handle)、锁钩(Hook)、连杆(Slider)和固定块(ground Block)等物体。
夹紧机构的工作原理是:如图7-1所示,在夹紧机构手柄(Handle)处施加一个作用力,驱动机构运动,使其锁钩(Hook)处产生十倍于作用力的夹紧力,用于夹紧登月舱和宇宙飞船。
夹紧机构的设计要求是:至少产生800N的夹紧力;施加在手柄上的力应不大于80N;释放手柄的力应最小;在振动环境中夹紧机构应安全可靠。
手柄Handle锁钩Hook图7-1 夹紧机构三维模型图以下将从创建几何构件、添加约束、添加载荷及结果后处理等几个方面详细介绍机械夹紧机构模型的建立。
通过本实例的学习,能够详细了解ADAMS软件设计流程及使用方法。
7.1.1创建几何构件1、创建新模型本实例将使用ADAMS/View的零件库、约束库和力库创建夹紧机构模型。
首先打开ADAMS/View,选择“Create a new model”,模型名称(Model Name):Latch,点击OK,创建新模型完毕。
其它设置如图7-2所示:图7-2 创建新模型2、设置工作环境选择菜单栏【Settings】→【Units】命令,设置模型物理量单位,如图7-3所示:图7-3设置模型物理量单位选择菜单栏【Settings】→【Working Grid】命令,设置工作网格,如图7-4所示:图7-4设置工作网格3、创建设计点设计点是几何构件形状设计和位置定位的参考点。
本实例将通过设计点列表编辑器创建几何构件模型所需要的全部设计点。
选择并点击几何模型库(Geometric Modeling)中的点(Point),下拉菜单选择(Add to Ground)、(Don’t Attach),并单击Point Table列表编辑器,创建并生成Point_1、Point_2等六个设计点,如图7-5、图7-6所示:图7-5设计点列表编辑器图7-6创建设计点4、创建摇臂(Pivot)选择并点击几何模型库(Geometric Modeling)中的平板(Plate),设置平板厚度值(Thickness)为1,圆角半径(Radius)为1,用鼠标左键选择设计点:Point_1、Point_2、Point_3,按鼠标右键完成摇臂(Pivot)的创建,将其重新命名(Rename)为Pivot,如图7-7所示:图7-7创建摇臂5、创建手柄(Handle)选择并点击几何模型库(Geometric Modeling)中的连杆(Link),用鼠标左键选择设计点:Point_3和Point_4,完成手柄(Handle)的创建,将其重新命名(Rename)为Handle,如图7-8所示:图7-8创建手柄6、创建锁钩(Hook)选择并点击几何模型库(Geometric Modeling)中的拉伸体(Extrusion),选择“New Part”和“Clsoed”,拉伸体长度(Lengh)设为1,用鼠标左键选择表7-1所示的11个位置,按鼠标右键完成锁钩的创建,将其重新命名(Rename)为Hook,如图7-9示:表7-1锁钩节点坐标图7-9创建锁钩7、创建连杆(Slider)选择并点击几何模型库(Geometric Modeling)中的连杆(Link),用鼠标左键选择设计点:Point_5和Point_6,完成连杆(Slider)的创建,将其重新命名(Rename)为Slider,如图7-10所示:图7-10创建连杆8、创建固定块(Ground Block)选择并点击几何模型库(Geometric Modeling)中的长方体(Box),选择“On Ground”,使其与大地(Ground)固结在一起,按下图创建固定体用鼠标左键选择设计点:Point_5和Point_6,完成连杆(Slider)的创建,将其重新命名(Rename)为Slider,如图7-11所示:图7-11创建固定块7.1.2添加约束1、添加旋转约束副选择并点击约束库(Joints)中的旋转副(Revolute Joints);选择“1 Location”(一个位置),“Normal To Grid”(垂直于工作网络),用鼠标左键选择Point_1,创建摇臂和大地的约束副;选择“2 Bodies - 1 Location”(两个物体一个位置),“Normal To Grid”(垂直于工作网络),选择摇臂和锁钩两个物体,左键选择Point_2,创建摇臂和锁钩的约束副;同理选择摇臂和手柄,位置为Point_3,手柄和连杆,位置为Point_5,创建摇臂和手柄、手柄和连杆的旋转约束副。
Adams个人学习技巧1、修改其密度、质量、转动惯量一个连杆,右键选中Part时,可以修改其密度、质量、转动惯量等属性右键选中LINK时,可以修改其形状属性右键选中MARKER(质心):可以修改其质心标志(特征)点位置。
2、修改形状属性对于一个长方形。
右键选中block时,可以修改其形状属性3、生成平板,rigid body: plate 是生成平板工具,利用三点成一平面。
4、移坐标轴,移坐标轴,先点选位置,5、什么是平板、多义线:plane(平板)polyline(多义线)6、设置小坐标设置小坐标,settings—object position handle,然后选位置,可设置小坐标7、编辑曲线将测试曲线转到大表中编辑,在曲线上按右键,选transfer to full plot8、弹簧的设置:弹簧要设置在不同的物体上9、修改测量曲线属性在测量曲线上按右键,选择measure modify,再选择左下角图标的measure attributes,可以设置图线名称、单位等。
10、设置背景颜色:设置背景颜色,settings—view background color11、设置坐标系、栅格颜色线型和粗细设置坐标系、栅格颜色线型和粗细,settings-working grid12、曲线比较曲线比较.,可以在measure曲线上按save curve,再修改参数,进行仿真,即得到两条曲线.13、显示多条曲线在后处理模块中,可以在simulatin中选择last run,然后,在source中选择mesure,在measure 中选择不同的测量名称,再按add curve,可以在同一个窗口显示多条曲线。
要在同一张后处理模块中显示多张曲线,在后处理模块中,选VIEW-PAGE-PAGE LAYOUTS,选择不同的显示模式,在不同的曲线显示区域,选中后,在simulatin中选择last run, 在source 中选择mesure, 再在add curve中选择add curve to current,然后装入曲线或仿真图象就行了。
ADAMS 2023动力学分析与仿真从入门到精通简介ADAMS(Advanced Dynamic Analysis of Mechanical Systems)是一种用于进行动力学分析和仿真的强大工具。
它可以帮助工程师和设计师在产品开发过程中预测和优化机械系统的性能。
无论是汽车、飞机还是机械设备,ADAMS都可以用来模拟其在不同工况下的动态行为。
本文档将介绍ADAMS 2023的基本概念和操作指南,从入门到精通,帮助读者快速上手并掌握ADAMS的使用方法。
1. ADAMS简介1.1 ADAMS的定义ADAMS是一种基于多体动力学理论的仿真软件,它能够对复杂的机械系统进行动力学分析和仿真,并提供详细的结果和可视化的模拟效果。
它主要用于评估系统的运动性能、力学特性和振动响应,是工程师进行设计优化和故障排查的重要工具。
1.2 ADAMS的应用领域ADAMS广泛应用于汽车、航空航天、机械设备等领域,用于模拟和分析复杂机械系统的动态行为。
例如,汽车制造商可以使用ADAMS来评估车辆的悬挂系统、转向动力学和车身振动特性;航空航天公司可以使用ADAMS来模拟飞机的飞行动力学和振动响应。
2. ADAMS基本概念2.1 多体系统ADAMS将机械系统建模为多个刚体之间的约束系统。
每个刚体包含了几何特征、质量和惯性属性。
通过在刚体之间添加约束和运动条件,可以建立复杂的多体系统模型。
2.2 约束约束用于描述刚体之间的相对运动关系。
ADAMS提供了各种类型的约束,如平面、关节、铰链等。
通过正确定义约束条件,可以模拟系统的运动和力学特性。
2.3 运动条件运动条件用于描述系统的运动。
ADAMS提供了多种运动模式,如位移、速度、加速度和力矩等。
通过在刚体上施加运动条件,可以模拟系统的各种运动情况。
3. ADAMS操作指南3.1 ADAMS界面ADAMS的用户界面由多个工具栏、菜单和窗口组成。
主要包括模型浏览器、属性编辑器、运动学模块、仿真控制和结果查看器等。
实用的Adams使用技巧、教程一,Adams常见问题篇1、ADAMS中的单位的问题开始的时候需要为模型设置单位。
在所有的预置单位系统中,时间单位是秒,角度是度。
可设置:MMKS--设置长度为千米,质量为千克,力为牛顿。
MKS—设置长度为米,质量为千克,力为牛顿。
CGS—设置长度为厘米,质量为克,力为达因。
IPS—设置长度为英寸,质量为斯勒格(slug),力为磅。
2、如何永久改变ADAMS的启动路径?在ADAMS启动后,每次更改路径很费时,我们习惯将自己的文件存在某一文件夹下;事实上,在Adams的快捷方式上右击鼠标,选属性,再在起始位置上输入你想要得路径就可以了。
3、关于ADAMS的坐标系的问题。
当第一次启动ADAMs/View时,在窗口的左下角显示了一个三视坐标轴。
该坐标轴为模型数据库的全局坐标系。
缺省情况下,ADAMS/View用笛卡儿坐标系作为全局坐标系。
ADAMS/View 将全局坐标系固定在地面上。
当创建零件时,ADAMS/View给每个零件分配一个坐标系,也就是局部坐标系。
零件的局部坐标系随着零件一起移动。
局部坐标系可以方便地定义物体的位置,ADAMS/View也可返回如零件的位置——零件局部坐标系相对于全局坐标系的位移的仿真结果。
局部坐标系使得对物体上的几何体和点的描述比较方便。
物体坐标系不太容易理解。
你可以自己建一个part,通过移动它的位置来体会。
4、关于物体的位置和方向的修改可以有两种途径修改物体的位置和方向,一种是修改物体的局部坐标系的位置,也就是通过MODIFY物体的position属性;令一种方法就是修改物体在局部坐标系中的位置,可以通过修改控制物体的关键点来实现。
我感觉这两种方法的结果是不同的,但是对于仿真过程来说,物体的位置就是质心的位置,所以对于仿真是一样的。
5、关于ADAMS中方向的描述。
对于初学的人来说,方向的描述不太容易理解。
之前我们都是用方向余弦之类的量来描述方向的。
11整车仿真 (234)11.1整车装配模型 (234)11.2整车仿真 (235)11.3后处理曲线读取 (237)11.4动画演示 (237)11.4录制动画演示 (241)11.5整车仿真调试 (241)附例 (242)233《整车仿真分析篇》11整车仿真在Adams/Car环境下进行整车动力学仿真必须包含的子系统有:前/后悬架转向系统前/后轮胎车身此外Adams/Car还会包含一个Test Rig(测试台)。
在开环(Open-loop)、闭环(Close-loop)和准静态分析(Quasi-static)中必须选择._MDI_SDI_TESTRIG。
用户可以在整车模型中包含其它的子系统,如制动子系统、动力系统等。
11.1整车装配模型在Standard Interface界面菜单里选择File>New>Full_Vehicle Assembly。
在出现的对话框里输入自己取的整车装配体名称,在各个子系统栏目里右击鼠标,在自己的数据库里找到相应的各个子系统:234235点击OK ,如图所示:本例分析以双移线仿真为例,没有添加动力总成部分。
11.2整车仿真从菜单选择Simulation>Full_Vehicle Analysis>Course Events>ISO Lane_Change 。
设定对话框如图所示:点击OK,如果运算成功的话信息窗口如下:23611.3后处理曲线读取方法和步骤请参照悬架分析篇11.4动画演示动画演示有两种方式:Review>Animation Controls1)从菜单选择Array设定动画控制如下:237点击播放按钮,可以观看动画演示。
2)从后处理窗口去看,并可以保存动画演示为*.avi格式视频。
点击Review>Postprocessing Window或直接按F8,进入后处理窗口。
如图所示在后处理窗口点该下拉菜单,选择Animation。
基于ADAMS和MATLAB的空气悬架系统仿真与试验研究空气悬架系统是一种采用空气弹簧作为弹性元件、电磁阀作为控制元件的先进悬架系统,其具有优良的适应性和可调性。
本文以ADAMS和MATLAB为工具,通过仿真和试验研究空气悬架系统的动态性能和控制策略。
首先,利用ADAMS建立了空气悬架系统的三维模型,包括汽车车身、四个轮子、空气弹簧和电磁阀等组成部分。
然后,运用ADAMS中的控制分析功能,分别设计了PID控制、模糊控制和神经网络控制三种控制策略,并通过仿真分析了它们的动态性能。
结果表明,三种控制策略在提高空气悬架系统的稳定性和舒适性方面均起到了显著的作用,其中神经网络控制效果最为优秀。
为了验证仿真分析的结果,本文对空气悬架系统进行了实际试验研究。
试验采用了与仿真模型一致的系统组成和控制策略,通过对空气悬架系统在不同路况下的动态响应进行测量和分析,得到了与仿真结果基本一致的结论。
试验结果表明,空气悬架系统在不同路况下均具有较好的适应性和可调性,且控制策略能够显著提高其稳定性和舒适性。
综合而言,本文采用ADAMS和MATLAB工具,从仿真模型到实际试验,对空气悬架系统进行了深入研究,通过分析不同控制策略的动态性能,为实际应用提供了科学依据和参考。
这一研究不仅可为汽车工业的发展提供技术支持,也有望在其他工业领域得到应用。
除了上述提到的控制策略,实际应用中,还可以采用基于模型预测控制、基于状态反馈控制等策略,进一步优化空气悬架系统的控制效果。
比如,基于模型预测控制可以通过建立系统动态模型,预测未来的系统状态并进行优化控制,以实现更精确的控制效果。
而基于状态反馈控制可以实现对系统状态的实时监测和响应,以使控制策略更加灵活和精准。
此外,应用新型传感器和智能算法等技术,还可以进一步提高空气悬架系统的控制能力和稳定性。
例如,在传感器方面,采用更高精度和更全面的参数监测,可以实现对系统压力、位移、速度等关键参数的实时监测和反馈。
山东建筑大学实验报告课程:现代机械工程基础实验Ⅱ院部:机电工程学院专业:机械工程及自动化班级:机械096班姓名:李希伟学号: 2009071304指导教师:马爱梅完成日期:2012-12-12一、实验目的1、综合练习计算机仿真应用软件ADAMS的使用和操作。
2、综合练习和使用ADAMS软件在机械系统的方案设计论证和分析阶段的应用。
二、实验环境计算机仿真应用软件ADAMS。
三、实验内容1、根据实验设计任务书要求对机械系统进行简单的分析设计计算;2、利用计算机仿真软件所设计的系统进行模型建立、连接和约束、载荷施加虚拟样机建立;3、根据任务书要求对机械系统进行仿真分析;4、根据要求书写实验分析报告或实验说明。
四、实验过程(抓取部分图形和曲线)1、实验样机模型建立(包括造型、施加约束、施加载荷)(1)环境设置:栅格设置范750mm、750mm;间距10mm、10mm;单位:MMKS;设置重力加速度Y=-9800/mm2;图标按钮处于打开状态;F4打开坐标窗口。
(2)创建支架在集合建模工具集中,单击工具图标;在主工具箱的选项栏中选择新零件在长、高、厚选项分别输入10mm、150mm、10mm在建模视窗中,选择点(-110,0,0),创建创建长方体、在集合建模工具集中,再次单击工具图标;长、宽、高的数值不变,在建模视窗中,选择点(0,0,0),创建创建长方体。
在集合建模工具集中,再次单击工具图标;在长、宽、高选项分别输入100mm、10mm、10mm,在建模视窗中,选择点(-100,130,0),创建创建长方体。
在集合建模工具集中,再次单击工具图标;在长、宽、高选项分别输入100mm、10mm、10mm,在建模视窗中,选择点(-100,100,0),创建创建长方体。
在集合建模工具集中,单击工具图标,分别将以上建立的四个长方体连接成为一个整体。
(3)创建滑块在集合建模工具集中,单击工具图标;在主工具箱的选项栏中选择新零件在长、高、厚选项分别输入40mm、50mm、10mm;在建模视窗中,选择点(-40,90,0),创建滑块,所创建的滑块以及支架如下图所示:(4)创建导轨以及立柱在以上创建的基础上,底端用长方体拉伸长100mm,高10mm,厚度10mm,拉出两条导轨,在导轨的末端用长为60mm高10mm宽10mm长方体连接件连接,然后在连接件的上端中间位置建立一高150mm,长80mm,厚度10mm的立柱,其上端与滑块7相连。
ADAMS 2023动力学分析与仿真从入门到精通1. 简介ADAMS(Advanced Dynamic Analysis of Mechanical Systems,机械系统高级动力学分析)是一种用于进行多体动力学分析和仿真的工程软件。
它可以帮助工程师在设计阶段预测和优化机械系统的动态性能。
本文档旨在介绍ADAMS软件的基本概念和使用方法,从入门到精通,帮助读者快速上手并深入了解该软件的应用。
2. ADAMS基本概念2.1 动力学分析动力学分析是研究物体在受力的作用下的运动规律的过程。
在工程领域中,动力学分析可以帮助工程师了解机械系统的受力情况、振动特性以及运动性能,从而进行系统设计和优化。
2.2 多体系统ADAMS主要适用于多体系统的动力学分析和仿真。
多体系统是由多个物体组成的系统,这些物体之间通过连接件(如关节、弹簧等)相互连接。
在ADAMS中,物体和连接件共同构成了一个复杂的多体系统。
2.3 仿真仿真是通过模拟真实系统的运行过程来获取系统的性能和行为数据。
在ADAMS中,可以建立一个虚拟的多体系统模型,并对其进行动态仿真。
通过仿真可以观察系统的运动轨迹、应力情况以及其他动态性能指标。
3. ADAMS软件安装与设置3.1 软件安装ADAMS软件可以从MSC官方网站上下载并安装。
根据操作系统的要求进行安装步骤,并确保软件安装成功。
3.2 界面介绍ADAMS的主界面由多个视图组成,包括模型视图、结果视图、控制视图等。
在开始使用ADAMS之前,需要熟悉界面的各个部分以及其功能。
3.3 工作空间设置在ADAMS中,可以通过设置工作空间来指定工作目录、结果输出路径等。
正确设置工作空间可以提高工作效率并方便管理文件。
4. ADAMS模型的建立与编辑4.1 模型概念在ADAMS中,模型是指多体系统的虚拟表示。
建立一个准确的模型是进行动力学分析和仿真的前提。
4.2 模型创建ADAMS提供了丰富的建模工具和元件库,通过拖拽和连接不同的元件可以创建复杂的多体系统模型。
基于ADAMS的虚拟试验场自动化仿真系统作者:杨志岱来源:《电脑知识与技术》2020年第09期摘要:虚拟试验场(VPG)是解决道路疲劳载荷数据采集(RIDA)问题的关键方法之一。
然而,该方法的应用面临着多路况仿真周期长、载荷结果处理繁杂、数据查找与提取不便等难点。
为了提高车辆仿真优化效率,本文设计一种基于ADAMS的虚拟试验场自动化仿真系统。
通过分析虚拟试验场的应用难点,介绍了该系统实现批量化、自动化和可视化的处理方法,并在此过程中进行任务监督和仿真管理,保证了鲁棒性。
仿真测试结果表明虚拟试验场的多路况仿真效率显著提升,进一步验证了该系统的有效性。
关键词:虚拟试验场;道路疲劳载荷数据;ADAMS;自动化仿真中图分类号:TP391.9文献标识码:A文章编号:1009-3044(2020)09-0260-04车辆零部件疲劳分析的道路载荷数据采集( Road Load Da-to Acquisition,RLDA),其传统方法需要组装物理样车,安装与调试传感器以及到试验场采集现场信号,成本高、周期长,难以满足底盘配置与调教优化的需求[1]。
而利用虚拟样车代替物理样车进行车辆测试、评估的虚拟试验场( Virtual Proving Ground。
VPG),成为解决传统道路载荷数据采集问题的新方法,被越来越多的汽车主机厂采用,如VOLVO、吉利和上汽等[2-4]。
虚拟试验场通过构建三维数字路面模型、高精度轮胎模型与全面的悬挂子系统模型,建立模型数据库,有效地保证了车辆动力学仿真结果的准确率与可信度。
在此基础上,便于用户开展结构疲劳、全频率振动噪声分析和碰撞历程仿真,降低成本与缩短周期[5][6]。
另一方面,虚拟试验场配合完备的路面库进行多路况仿真测试可预测车辆的最大有效颠簸行程和车身最大负荷,进而降低后期的潜在风险和研究成本[1]。
国内外汽车主机厂主要采用集建模、求解、可视化技术为一体的动力学仿真软件ADAMS 构建虚拟试验场,该软件是目前世界上使用范围最广、最负盛名的机械系统仿真分析软件[7]。