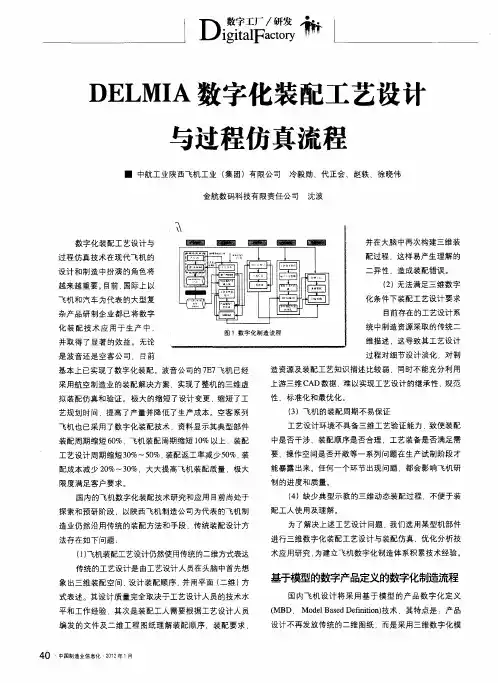
DELMIA数字化装配工艺设计与过程仿真流程
- 格式:pdf
- 大小:646.48 KB
- 文档页数:3
Delmia功能的使用介绍摘要:本文介绍了Delmia的Deneb和Version做了一个简单的介绍,对其中的DPM模块的Assemble和Machining功能做了一个详细的介绍。
并针对DPM Assemble的特点,结合其他模块对Assemble的辅助,对其具体的使用做了简单的模拟。
1.介绍Delmia作为Dassault公司续Catia之后的又一大型工业软件。
它提供了能够数字化地设计、测试和验证一台机床、一个工作单元或整条生产线的解决方案,DELMIA PLM 提供了流程与资源功能,能够贯穿整个产品生命周期,创建和验证连续的、涉及产品的制造流程。
DELMIA 服务于那些制造流程优化对其来讲非常关键的行业,包括汽车、航空、制造与装配、电气电子、生活消费品,工厂和造船部门。
通过使制造商能够优化流程,DELMIA 帮助公司提高生产率,促进协同和加速上市时间。
2.主要模块Delmia分为Deneb和Version两个部分。
其中,Version是可以与Catia完全无缝连接的模块系统,有着与Catia相同的操作方式与系统界面,而Deneb则是相对独立的系统模块,操作方式与系统界面与Catia之间有着很大的差异。
两者之间的数据可以相互的使用,但并不能进行直接的转换,两者的数据转化需要一定的操作与修改。
2.1 Deneb的主要模块Deneb的功能主要关注于一些细节过程的仿真模拟,并力图把他们做的最好。
主要的模块包括:ENVISIONIGRIP (Interactive Graphics Robot Instruction Program)UltraArcUltraGRIPUltraPaintUltraSpotVirtual NCQUEST(Queuing Event Simulation Tool)其中,Ultra系列如其名所表示,为机器人控制,角焊,点焊和喷涂的专业模拟。
而IGRIP则是对机器人的控制,并可以使用机器人语言进行良好的离线编程。

第一章软件设置在进行仿真之前,建议完成培训阶段的DELMIA option设置(参考文件1-Option.pdf);第二章仿真流程2.12D布局图导入1、AutoCAD布局图纸导入DELMIA:AutoCAD的零点坐标系与DELMIA一致,为保证导入的布局图在DELMIA原点附近,建议将CAD图纸导入之前进行偏移,选取某一点作为布局图的参考;如下图,选择布局图左下角为0,0位置;2、偏移之后保存成较低版本dwg文件(如AutoCAD 2007),直接在DELMIA中打开,File->Open,然后保存成*.CATDrawing文件备用3、选择进入DELMIA->AEC Plant->Plant Layout模块,如下图所示,建立一Area对象,保存;4、切换至DELMIA->Resource Detailing->Resource Layout模块,创建Area对象的Foot Print;勾选“show Footprint”选型,OK。
5、同时打开布局图,点击“Attach Drafting View”,按照图示顺序选择对象,布局图关联到DELMIA环境;将Product文件保存,然后插入到Resource节点;备注:为了后续方便机器人和设备精确布局,可以结合CATIA草图模块,选取布局图机器人基座中心点,创建一组圆柱特征;2.2机器人模型导入根据布局图,切换至DELMIA->Resource Detailing->Device Task Definition模块,选择catalog方式选择机器人型号并插入机器人模型,通过Snap命令将机器人精确定位;2.3三维数据导入1、选择从供应商提供的以工位为单位的焊枪及夹具设计数据,如下图为3dxml轻量化格式文件,直接打开并建立同名文件夹,保存相关数据在本地;2.4车身焊点建立1、焊点类型:车身焊点数据需要基于STEP格式或者CATIA设计数据创建,在3D模型中以多种形式存在,几何球型或者几何点+线段表示,如下图所示;1)点代表焊点的位置,线段代表焊点的方向;2)球型焊点和一个坐标轴系2、将某工位数据车身数据插入到Product节点下,建立Tag group,如下图所示;3、建立第一个焊点,如下图所示步骤,把罗盘Z轴吸附到线段上,以绿色显示,此时可以拖动罗盘移动至球的中心,同样也可以转动XY平面,OK即可创建第一个焊点;依次可以创建该工位的所有焊点结果如下所示:(注:焊点导出)为了便于使用轻量化数据进行仿真,焊点数据也可以先导出到外部Excel 文件中,然后再导入到仿真场景中;2.5焊枪/库建立1、DELMIA将STEP格式焊枪模型打开,另存为Product和Part文件;2、确定动臂和静臂各组件;3、切换到Device Building工作台,新建一个Component类型,将静臂部分全部移动到新的组件里面;4、然后依次将静臂部分固定(Fix),动臂各组件刚性连接(rigid joint),建立运动机构;5、机构定义完成之后,创建焊枪TCP点和Base点;6、定义焊枪的特殊状态(Home Position):关闭、工作(考虑车身件厚度,TCP点偏移静臂焊枪头2mm)小开,大开;7、焊枪入库:新建Catalog文件,建立C型和X型枪分类,然后将建好机构的焊枪添加到库中,便于重复调用;可以事先建立常用焊枪库,也可逐步添加;2.6焊枪位置分析1、2.1~2.3节将准备好的数据资源导入到DELMIA环境中;2、项目数据文件中,车身、焊枪和夹具都是在车身数据坐标系下完成的装配,本节开始前最好是按照布局图,将位置调整好;4、在方案设计阶段,夹具和机器人的位置都存在变化,要逐个焊点对经验选择的焊枪进行验证,可以使用手动焊枪选型的命令;a)执行手动焊枪选型命令,选择该工位上使用的焊枪,然后选择要分析的焊点,罗盘自动吸附到焊点上,TCP点和Tag点的坐标系重合;b)此时可以转动绿色的罗盘,绕Z轴旋转(焊点的位置和Z轴方向不能改变,因此只能绕Z轴旋转);调整好焊枪的位置与夹具和工件都不发生干涉,点击Save Position即可保存当前焊枪的焊接姿态;c)下图所示为焊枪和夹具发生干涉,通过旋转Z轴方向可以避开干涉,如果没有办法避开干涉,就需要修改夹具夹头的结构或者位置;2.7机器人可达性分析经过焊枪手动选型之后,如果基本上能够排除掉焊枪和工件的干涉,那么接下来可以添加机器人任务,检查机器人可达性;a)通过Set tool命令将焊枪关联到对应的机器人上;b)Add tag命令将当前焊枪对应要焊的焊点添加到机器人Task;c)使用Reach命令,初步分析机器人的可达性,如果不可达或者机器人关节超出极限位置,分析结果直接显示为out of limit或unreachable;d)如果是unreachable,那么需要稍微调整机器人的位置;机器人基座高度200mm,300mm,500mm,700mm等e)接下来,teach示教逐个检查每个焊点的可行性,检查机器人的姿态;重复操作,实现所以焊点可达可焊;2.8 机器人经过点插入1、机器人示教完成之后,可以调整打点的顺序,然后增加进枪、出枪的经过点(Via Point );下图示为机器人可达性调整好的任务,可以通过右侧‘箭头’调整打点顺序。
[摘要] 针对我国航空制造业当前装配工艺规划与设计的现状,开展了基于DELMIA进行飞机三维装配工艺设计与仿真方法的研究,对三维装配工艺设计与仿真的关键技术进行了重点分析,包括三维工艺组件划分、装配生产线布局规划、基于知识的装配工艺规划,以及装配仿真中的装配干涉检查、人机工效仿真,并通过某型飞机机翼装配对三维工艺设计与仿真进行了应用验证。
关键词:飞机制造 装配工艺设计 装配仿真 DELMIA 三维[ABSTRACT] The situation of assembly process design and layout in aircraft manufacturing department of our country are analyzed, proposes the method and work-flow for aircraft 3D virtual assembly process design and simulation based on DELMIA are proposed, the relational functions of this software with the contents of 3D virtual assembly are combined, the key technologies are analyzed in detail, including process-oriented component partition and assembly line layout through 3D model, assembly process design based on former knowledge, and the in-terference check and ergonomics analysis in assembly simulations. Finally the verifi cation of application in some aircraft wing virtual assembly is introduced.Keywords: Aircraft manufacturing Assembly process design Assembly simulation 3D随着数字化技术在我国航空制造业中的应用不断深入,飞机研制已经从三维数字化设计、数字化预装配向基于模型定义技术(Model Based Definition,MBD)迈进,已基本取消二维图,并且在部分航空企业已经实现了全机三维标注;同时自动化装配生产线、柔性工装、自动钻铆机、装配机器人、激光跟踪仪等先进设备的引入,也使产品制造、装配向数字化方向逐渐完善。
使用DELMIA在飞机中机身上部装配工艺仿真运用DELMIA是一款特殊工业领域的仿真软件,可以在飞机中机身上部装配工艺中得到广泛应用。
下面将详细介绍DELMIA在飞机中机身上部装配工艺仿真的运用。
一.DELMIA简介DELMIA是一个数字化制造解决方案,为制造业界提供全面的仿真和虚拟生产环境,通过更加精确地模拟生产现场和过程,帮助企业提高产品质量、降低制造成本和缩短产品上市时间。
它包含多个模块,其中包括飞机中机身上部装配工艺仿真。
二.DELMIA在飞机中机身上部装配工艺仿真的应用范围DELMIA在飞机中机身上部装配工艺仿真的应用范围很广泛,涵盖了从设计到生产的整个过程。
具体应用包括:工艺规划、装配工序设计、人机工程学分析、工作站设计、生产线规划、物流优化等。
三.DELMIA在飞机中机身上部装配工艺仿真的优势1.提高装配精度:DELMIA可以模拟装配过程中的每个步骤,从而可以发现潜在的装配问题,并及时调整工艺,提高装配精度。
2.降低成本:通过DELMIA进行装配工艺仿真,可以提前发现设计上的问题和改进的空间,减少改造次数,降低成本。
3.缩短工期:DELMIA可以模拟整个装配过程,帮助企业合理安排工艺和工序,减少浪费的时间和资源,从而缩短装配工期。
4.提高安全性:在DELMIA的虚拟环境中,可以模拟机身上部装配过程中的各种情况和风险,并进行相应的分析和预防措施,提高安全性。
四.DELMIA在飞机中机身上部装配工艺仿真的应用实例以飞机制造商为例,他们使用DELMIA在飞机中机身上部装配工艺仿真中的几个方面:1.工艺规划:使用DELMIA进行装配工艺的规划和优化,包括装配顺序、工装设计、工作站布局等,以确保装配过程的流畅性和高效性。
2.装配工序设计:通过DELMIA模拟飞机机身上部的装配过程,评估不同工序的装配难度和工时,优化装配工序的设计。
3.人机工程学分析:使用DELMIA进行人机工程学分析,确保工人在装配过程中的人体工程学要求得到满足,提高工人的工作效率和安全性。
[摘要] 为了实现飞机、船舶等大型复杂产品的计算机辅助装配工艺规划和工艺仿真的集成,提出了装配工艺微规划的概念,介绍了装配工艺微规划的组成层次以及基于装配工艺微规划实现装配工艺规划和仿真集成的方法。
结合仿真平台DELMIA,采用CAA对DELMIA进行二次开发,实现了装配工艺微规划技术在该环境下的实现,最终输出可直接指导装配现场的电子装配操作指令、装配操作视频等多媒体装配工艺文件。
关键词: 装配工艺微规划 装配工艺仿真 DELMIA二次开发[ABSTRACT] In order to integrate the processes of computer aided assembly process planning and simulation in the large and complex product manufacturing such as an aircraft or a ship, etc,the concept of assembly process micro-planning(APMP) is proposed. By using APMP for information sharing and transferring between the area of process planning and process simulation, so the both is in-tegrated. Besides, by using CAA to develop new function based on DELMIA,this technology is implemented. And the electro-assembly order and assembly process video can be output to guide the workers to implement a product as-sembly in a work shop.Keywords: Assembly process micro-planning As-sembly process simulation Secondary development of DELMIA在航空、航天、船舶等领域的大型复杂产品制造过程中,计算机辅助装配工艺规划[1-3](Computer Aided Assembly Process Planning, CAAPP)和装配工艺仿真[2-3](Computer Aided Assembly Process Simulation, CAAPS)是产品数字化制造过程中的关键环节。
基于DELMIA的汽车装配线建模与仿真作者:容芷君周燕学刘悦摘要:汽车装配线直接决定了汽车生产的效率,因此,对汽车装配线进行建模与仿真,优化装配流程十分必要。
基于DELMIA的DPM(Digital Process for Manufacturing)模块,对汽车装配线的装配序列规划、装配干涉以及装配路径规划进行研究,按规划的工艺流程对总装线进行模拟仿真,分析装配线的平衡率,通过仿真结果验证该装配线的可达性、可行性以及装配线的人因工效性。
文中研究工作对优化及改善汽车装配过程,缩短工艺规划时间,实现汽车装配线的流水化具有一定指导意义和应用价值。
1 装配生产线建模与仿真汽车装配线将人和机器有效结合起来,实现汽车零部件的自动装配,在汽车生产中扮演着重要的角色。
汽车装配线直接决定了汽车的生产效率。
随着汽车工业和零部件工业的发展,汽车装配线技术水平也有了较大的提高,围绕汽车装配线的研究一直是汽车工业发展的一个重要内容。
装配生产线的建模与仿真能把生产资源、产品工艺数据、装备等信息动态地结合起来,通过系统活动过程来模拟装配过程,从而分析和预测装配线的效能。
虚拟装配系统是装配系统向多维信息化空间的一种映射,主要包括基本模型构建、装配序列规划、路径规划、干涉检查和装配仿真等关键技术。
建立虚拟装配系统的目的是:在计算机上利用已有的虚拟装配环境,在该装配环境下能够把用户指令和各种信息及时输入到系统中,也能把虚拟环境中的序列和路径规划结果、干涉检测结果、装配仿真结果等传输给用户,实现产品的最终装配。
当前有许多数字化仿真软件能有效地帮助人们实现对生产装配线的建模仿真,如DELMIA,eM-Power,ProModel,Flexsim等。
其中DELMIA解决方案涵盖汽车领域的发动机、总装和白车身,航空领域的机身装配、维修维护,以及一般制造业的制造工艺。
使用户利用数字实体模型完成产品生产制造工艺的全面设计和校验。
DELMIA 数字制造解决方案建立于一个开放式结构的产品、工艺与资源组合模型(PPR)上,此模型使得在整个研发过程中可以持续不断地进行产品的工艺生成和验证。

仿真规程2013.4.221.仿真的概念功能:设备的动作、时序、节拍;目的(售前阶段):方案可行性分析、动作演示;目的(设计阶段):找到设计/布局/方案中的问题,并做相应修正;2.软件平台设计阶段:DSS.Delmia3.工作流程S1:仔细阅读布局图、方案说明书、技术协议等;●根据要求,准备资料,计划时间等。
●掌握客户对功能、节拍、工艺等需求;●掌握主要设备组成;●整理外购件设备性能和参数说明书;●了解加工工艺知识;●对不明之处,与团队沟通;●与团队内其他人员沟通,掌握所需材料的获得时间;●合理安排进度;S2:建立仿真的文件夹目录结构自制设备编号命名必须依照机械设计课的任务书!外购设备命名使用英语或代码,不得用汉语或拼音!仿真主文件CATProcess文件名称为:“Process_7位项目号_子系统代码(数字,如有)_6位日期(yymmdd)”S3:数模格式转换(1)请机械设计课设计人员提供数模前,根据数模中心,建议用于位置定义的坐标系;(2)请机械设计课设计人员必须提供STEP或CGR格式的文件;(3)在DELMIA中将STEP转成CATPart/CATProduct格式(如数模曲面复杂或不便转成CATPart,可转成CGR格式),并按照任务书规定命名(FAxxxxxyy);注意:数模属性中的名称也要按规定命名;设备数模文件插入新建装配体CATProdcut;CATProdcut命名成FAxxxxxyy_dev;将所有数模按以上方式准备好,待仿真时调用;自制设备命名前,必须向机械设计课获取定义号;S4:为必要的设备做运动关系要求先将一个设备内部有相对运动关系的parts分成两个components;固定不动部分命名成J0,第一关节运动部分J1,第二关节运动部分J2,以此类推;建立机构固定J0在components 间做相对运动关系joints;S5:将数模插入仿真文件Process有运动的工艺设备(如机器人)导入Resource,库中导入的设备需将其“实例”名按工位号命名(如R6);静态设备和加工对象导入Prodcut使用罗盘定位各个设备;每次设备改变位置后,必须用命令保存;S6:利用机器人示教功能,检查机器人工作最远和最近点可达性和姿态,调整和优化设备间相对位置;S7:利用Teach示教机器人路径;机器人的不同功能性路径段必须分成不同的Task程序,Task的命名为:“机器人名_动作功能”(如R6_unload)S8: 2D局图通过仿真,确定每个设备的最终外形尺寸和安装位置,然后绘制2D布局图;文件名称为:“layout_7位项目号_6位日期(yymmdd)”4.规则•建模•建立安装原点;•尽量简化数模,但同时保留关键轮廓信息;•动作•避免机器人奇异问题;•避免机器人关节极限;•避免工件和工具本身与机器人干涉;•避免管线缠绕;•布局•依据中心设备的布置原点,确定其它位置了;•机器人布置位置+/-5cm内可变;Note:●通过网络文件夹(Z:\10_FA部\01_项目\2013年项目\FA1xxxx\02_布局和仿真\02. 仿真)传递数模文件,方便团队协作。
DELMIA飞机中机身上部装配工艺仿真激光跟踪仪在飞机装配中的运用专业综合实训(现代飞机装配部分)实验报告目录第一章飞机中机身上部装配工艺仿真 (1)1 飞机装配仿真技术 (1)2飞机装配工艺仿真软件 (2)3 飞机机身结构及零件分析 (3)3.1机身总装图 (3)3.2机身典型零件 (3)4 飞机机身结构件装配顺序的规划 (5)4.1工艺分离面和设计分离面 (5)4.2装配基准的选择 (6)4.3工装设备的选用 (7)5飞机上半机身装配方案及DELMIA仿真 (8)5.1装配仿真流程 (8)5.2装配序列规划 (8)5.3装配路径规划 (9)5.4装配工艺仿真过程 (10)5.5装配干涉检查 (12)第一章飞机中机身上部装配工艺仿真1 飞机装配仿真技术在现代制造企业的生产流程中,工艺设计工作贯穿于整个制造流程当中,是生产技术准备工作的第一步。
工艺设计工作不仅涉及到企业的生产类型、产品结构、工艺装备、生产技术水平等,而且还要受到工艺人员实际经验和生产管理体制的制约,其中的任何一个因素发生变化,都可能导致工艺方案的变化。
工艺总方案、工艺路线规划和工艺规程是指导工装制造和零件装配的主要依据,它们对组织生产、保证产品质量、提高生产率、降低成本、缩短生产周期及改善劳动条件等都有直接影响,因此工艺设计是整个生产流程中的关键性工作。
以往装配工艺的设计工作主要是依赖工艺人员个人的技术水平和经验,工艺人员根据产品图纸、工艺标准、工装、设备等,所做的工艺设计在车间实际生产(式制)时,还要不断更改,不能保证其装配工艺设计的合理性、适用性。
而大型飞机由于尺寸大,零件数量多,结构复杂,协调部位多,装配工艺设计不可避免地存在问题。
但装配工艺设计中隐藏的错误难以在设计过程中被发现,装配工艺的优化基本上是凭工艺员的经验,工艺设计中存在的问题往往要在产品实际装配过程中才被发现 , 因此装配工艺设计的错误带来了产品、周期、人力和费用的损失。
DELMIA软件C型焊枪机构创建——数模装配与机械装置、固
定装置创建
一、数模装配
1.打开DELMIA软件,进入【装配设计】模块中,点击右侧的“具有定位的现有部件”命令图标,然后点击浏览树中的“Product1”,弹出选择文件对话框,浏览到保存焊枪各个部件的文件夹,使用快捷键Ctrl+A全选,点击打开,焊枪被载入,并保持装配关系,如下图所示。
2.鼠标点击浏览树中的“Product1”,使其高亮显示,按快捷键Alt+Enter,弹出属性窗口,修改零件编号为C_SpotGun,如下图所示,点击确定按钮。
3.将其保存到与零部件相同的位置,文件名为C_SpotGun,如下图所示。
二、机械装置与固定零件创建
1. 切换到【Device Building】模块中,点击右侧的“NewMechanism”命令图标,创建机械结构。
在浏览树中的Applications中出现机械装置及其关系,如下图所示。
2.点击右侧的“Fixed Part”命令图标,在弹出的新固定零件对话框中选择刚创建的“机械装置.1”,点击浏览树中的body_c部件,为焊枪创建固定装置。
固定关系在浏览树中的Applications中展示,如下图所示。
上一篇:DELMIA软件C型焊枪机构创建——数模载入与拆分
····The End··
感谢关注,精彩内容持续更新中。
数字化设计与仿真是现代工程设计领域中的重要工具和技术。
它通过将设计和仿真过程与计算机技术相结合,能够帮助工程师和设计师们更快速、更精确地进行产品设计和性能仿真。
下面我们将简要介绍数字化设计与仿真的一般步骤。
1. 需求分析和概念设计在数字化设计与仿真的开始阶段,首先需要对产品的需求进行分析。
这包括对产品功能、性能和外观的详细了解,以及对用户需求和市场需求的调研。
在需求分析的基础上,设计团队会进行概念设计,提出不同的设计方案和思路,为后续的数字化设计和仿真奠定基础。
2. 数字化建模数字化建模是数字化设计的核心环节。
在这一步骤中,设计团队会使用计算机辅助设计(CAD)软件对产品进行三维建模。
通过CAD软件,设计师能够更加直观地呈现产品的外观和结构,并对产品进行参数化设计,为后续的仿真分析提供准确的几何模型。
3. 材料选择和工艺优化在数字化设计的过程中,材料选择是非常重要的一环。
通过材料科学和工程技术,设计团队需要对不同材料的性能、强度、耐久性和成本进行评估和选择,以确保产品在设计阶段就能满足实际使用的要求。
工艺优化也是数字化设计的重要内容之一,设计团队需要综合考虑材料加工、成型和组装的工艺特点,为产品的生产和制造提供参考和支持。
4. 仿真分析和性能评估在数字化设计的过程中,仿真分析是必不可少的一步。
通过有限元分析(FEA)、计算流体力学(CFD)等仿真技术,设计团队可以对产品的结构强度、热传导、流体运动等进行模拟和分析,为产品的性能评估提供依据和支持。
通过仿真分析,设计团队可以提前发现产品可能存在的问题和风险,及时进行优化和改进。
5. 优化和再设计在仿真分析的基础上,设计团队会进行产品的优化和再设计。
通过对仿真结果进行综合评估和分析,设计团队可以针对产品的结构、材料和工艺进行进一步的调整和改进,以提高产品的性能和质量,降低产品的成本和风险。
6. 设计验证和样品制作数字化设计与仿真的最后阶段是设计验证和样品制作。
切割下料淬火一次成形二次成形时效外形切割钻孔修整基于Delmia/Quest 的钣金零件生产线的仿真与分析张丽1,郭佳2,刘春1,马玉鹏1(1.沈阳航空航天大学航空宇航制造工程学院,沈阳110136;2.中航工业沈阳飞机工业(集团)有限公司,沈阳110850)1引言钣金零件是一种被广泛应用于机电、轻工、航空、航天、汽车等行业的零件,材料种类繁多、结构复杂,工艺成形困难。
目前国内钣金企业基本上还停留在小作坊的生产模式,存在工艺路线不合理、在制品大量积压、工时等待时间长等一系列问题。
这就迫切需要企业不断改进制造资源的配置,以提高生产效率和工作质量,来进一步满足生产的需要。
以前,没有有效手段对生产线进行评估,只能通过实际生产来验证生产线设计或对改进方案的合理性与可行性进行评估,成本高、周期长、效率低且风险较大。
近年来,计算机仿真技术以良好的可控制性、无破坏性、可复现性和经济性的特点,将研制过程、运行过程和实施过程放在实验室中进行,在各个领域得到了广泛的应用,生产线的设计与评估也逐渐采用该技术。
目前生产线建模仿真软件种类很多,例如:Aline2.0、Flexible Line Balance 、Delmia/Quest 、eMPowerTM 、Flexsim 、eM-Plant 等,国内生产线建模仿真软件大多是基于理论计算的平面显示系统,仅可以进行一些简单的数据统计分析,比较抽象。
仿真技术在国内生产制造领域的应用还不广泛,存在一定的局限性。
相比之下国外对生产线仿真规划的研究工作比较成熟,可贯穿生产线的设计规划到仿真实现以至系统维护。
Delmia/Quest (Queuing Event Simulation Tool )是法国达索公司(Dassault Syst èmes )“数字化制造”平台子系统,它是基于离散事件的理论框架,提供以物料的输送、处理和存储为线索的仿真环境,包含机床、缓冲区、处理工艺、故障率、维修、操作者、路径和物料出口等快速建模的素材元素。
DELMIA在飞机的数字化装配工艺设计与过程仿真技术项目实施情况陈兴虎1、刘军锋1、刘红军2、浦一飞21西安飞机工业(集团)公司 2西安安托公司前言数字化装配工艺设计与过程仿真技术在现代飞机的设计和制造中扮演的角色将越来越重要。
它提供了在3维数字化环境中动态地安装零部件及其组件的整个过程。
通过数字化3维仿真技术实现飞机装配全过程的仿真。
并在仿真过程中检查干涉以确保所有零部件的准确安装,及这种安装相对于其周边安装件而言的可行性,同时可验证操作人员在该环境下的可达性,可操作性。
目前国际上以飞机和汽车为代表的大型复杂产品研制企业都已将数字化装配技术应用于生产中,取得了显著的效益。
无论是波音还是空客目前基本上已实现了数字化装配。
波音公司的7E7飞机已经采用航空制造业的装配解决方案,实现了整机的3D虚拟装配仿真和验证。
极大的缩短了设计变更,缩短了工艺规划时间,提高了产量并降低了生产成本。
空客系列飞机壁板装配采用了以数控钻铆机为中心的柔性装配系统,从铆接过程到装配管理均实现了数字化控制。
资料统计得出:对典型部件装配周期缩短60%,飞机装配周期缩短10%以上,装配工艺设计周期缩短30%~50%,装配返工率减少50%,装配成本减少20%~30%,大大提高飞机装配质量,极大限度满足客户要求。
为充分了解DELMIA软件的功能特性及其装配工艺设计思想和装配设计流程,以西飞即将投产的ARJ21中央翼组件的装配为验证项目展开中央翼组件的数字化装配工艺设计与过程仿真技术项目实施。
ARJ21是Advanced Regional Jet for the 21st Century的简称,是70~90座级的中、短航程支线飞机,拥有国内自主知识产权,按照世界上最新技术设计,研制过程中全面采用数字化技术是该新支线的又一特点。
同时,并行工程技术的充分应用,从飞机总体方案起,设计部门、工艺部门、项目管理部门等各部门就介入进去,一起工作,组成了真正的联合工作队。