微惯性技术第四章
- 格式:ppt
- 大小:2.12 MB
- 文档页数:88
基于微惯性传感器的姿态算法研究一、本文概述随着科技的快速发展,微惯性传感器在诸多领域,如航空航天、无人驾驶、虚拟现实等,扮演着日益重要的角色。
其中,姿态解算作为微惯性传感器的核心技术,对设备的定位、导航与控制等具有决定性影响。
本文旨在深入研究基于微惯性传感器的姿态算法,旨在提高姿态解算的精度与稳定性,为相关领域的技术进步提供理论支持与实践指导。
本文将首先介绍微惯性传感器的基本原理及其在姿态解算中的应用,为后续研究奠定理论基础。
随后,将详细分析现有姿态算法的优势与不足,并在此基础上提出一种新型的姿态解算算法。
该算法将结合微惯性传感器的特点,通过优化数据处理流程、提高传感器数据融合精度等方式,实现更准确的姿态解算。
本文还将对所提出的新算法进行仿真验证与实验测试,以评估其在实际应用中的性能表现。
通过对比分析实验数据,本文将揭示新算法相较于传统算法的优越性,并探讨其在实际应用中可能遇到的问题及解决方案。
本文将全面而深入地研究基于微惯性传感器的姿态算法,以期在提高姿态解算精度与稳定性方面取得重要突破,为相关领域的技术进步做出贡献。
二、微惯性传感器技术概述微惯性传感器,作为一种集成了微型机械和微电子技术的先进传感器,已在现代导航、姿态测量和控制系统等领域得到了广泛应用。
其核心部件包括微型加速度计和微型陀螺仪,它们分别用于测量物体的加速度和角速度,进而推算出物体的姿态和位置信息。
微型加速度计主要利用压电效应、压阻效应或电容变化等原理,通过感知物体在加速度作用下的形变或电荷变化来测量加速度。
微型陀螺仪则通过测量物体在旋转运动中的角速度来推算姿态变化,其工作原理通常基于振动陀螺的科里奥利效应。
与传统的惯性传感器相比,微惯性传感器具有体积小、质量轻、功耗低、价格低廉等优点,因此在许多对体积和成本有严格要求的场合,如无人机、智能穿戴设备、机器人等领域,微惯性传感器成为了首选的姿态测量工具。
然而,微惯性传感器也存在一些固有的技术挑战,如测量误差、噪声干扰、温度影响等。
基于MEMS技术的微型惯性导航系统的发展现状一、本文概述随着微纳技术的快速发展,微型惯性导航系统(Micro-Inertial Navigation System, MINS)以其体积小、重量轻、功耗低等优点,在航空航天、无人驾驶、机器人导航、个人定位等众多领域展现出广阔的应用前景。
其中,基于微机电系统(Micro-Electro-Mechanical Systems, MEMS)技术的微型惯性导航系统因其实用性和成本效益,成为了当前研究的热点。
本文旨在全面概述基于MEMS技术的微型惯性导航系统的发展现状,包括其基本原理、关键技术、应用领域以及面临的挑战。
我们将简要介绍惯性导航系统的基本原理和MEMS技术的基本概念。
然后,重点分析当前MEMS微型惯性导航系统的关键技术,如微型化设计、误差补偿与校准、数据处理算法等。
接着,探讨该技术在航空航天、无人驾驶、个人定位等领域的应用现状。
我们将讨论当前微型惯性导航系统面临的挑战,如误差累积、环境适应性等问题,并展望未来的发展趋势。
通过本文的阐述,希望能够为相关领域的研究人员和技术人员提供有价值的参考,推动基于MEMS技术的微型惯性导航系统的发展和应用。
二、MEMS技术在微型惯性导航系统中的应用微型惯性导航系统(Micro-Inertial Navigation System, MINS)结合了微型机电系统(Micro-Electro-Mechanical Systems, MEMS)技术与惯性导航原理,实现了导航系统的微型化、低功耗和高度集成化。
随着MEMS技术的快速发展,MINS在军事、航空、航天、无人驾驶以及消费电子等领域的应用越来越广泛。
MEMS加速度计和陀螺仪是MINS的核心部件,用于测量载体在三维空间中的加速度和角速度。
通过精确的测量和数据处理,它们为导航系统提供必要的导航参数。
与传统的惯性器件相比,MEMS加速度计和陀螺仪具有体积小、重量轻、功耗低和成本低的优点,非常适合用于构建微型化的惯性导航系统。
哈尔滨工张大学硕士学位论文摘要撼联式惯性导航系统是一种十分先进的惯性导航技术,它采用数学平台代替实体乎台,即通过导舷计算机实时计算出姿态矩阵,建立起数学平台, 所汉导靛诗算辊跫建整个系统麓谈心寇关毽。
瓣薅,捷联矮浮簸系统聂澎衮精度、商可靠性、低成本、小型化、数字化的方向发展。
怒现代数字信号处理中的一门新兴技术,作为一零孛专魏数字售号处理器,它具骞毫激、麓这秘裹蕤凄等貔点。
本文应用单片机和设计了一套被捷联导航计算机系统。
以高速、高精度的?作为导航计算机数据处理的核心,以高速、商性能的离档位单片枧为作为整个系统的控铡器,构成了~褰双勺捷联导簸计簿枫系统。
这为导虢系统瀚小型纯、低藏本、数字化提供了一种设计思想。
如果再加上、电子罗擞和计程仪等,就可以完整的组合一个定位和导航系统。
本文蠹绕基予蕊导菠诗算壤系统,具,零巧震了以下尼方囊骚究工作:.论文分析了捷联惯导系统的基本原理,讨论了捷联懒导系统的算法。
.提出并论证了导航计算机的总体方案,同时分析了和单片枕这两牵申微处理器的特点和应用方法。
.讨论了基予麓捷联镄导系统静硬俘设计,包括基本功能静实现、原理框图及外围电路的设计。
本文对周围的接口电路作了较详细的介绍,主要电路有存储器系统、引导装载程序系统、通用异步串行蹦电路以及复位电路等。
.论述了系统的各种软件的舆体设计方法。
采用汇编语言和语言混台编程的方法来实现麟个系统软件。
并且详细讨论了实现该导航系统过程中的软件、硬件的调试和考核过程。
关键词:捷联惯性导航系统:数字信号处理器;数据处理;单片机哈尔滨工程太学硕士学位论文拄. , ,, ,, 。
,曲,跏,,它 .。
, 拉. ?曲 ?;圆 .,.‘’., ? ,:......髓接。
.?。
.. , , .,, 南撞哈尔滨工程大学硕士学位论文. 掣硼娃..: ;;; ?哈尔滨工程大学学位论文原创性声明本人郑重声明:本论文的所有工作,是在导师的指导下,由作者本人独立完成灼。
第9卷第4期中国惯性技术学报 2001年・仪表研究与设计・文章编号:1005-6734(2001)04-0046-04微惯性仪表技术的研究与发展丁衡高,王寿荣,黄庆安,裘安萍,万德钧,周百令,苏岩 (东南大学,江苏南京 210096)摘要:论述了当前国内外微惯性仪表设计和制造技术的研究与发展,强调了对相关基础理论研究的重要性,提出了计算机集成微制造单元的概念。
关键词:微惯性仪表;微机械陀螺;计算机集成微制造单元中图分类号:TN402;TH16 文献标识码:A Research and Development of Micro Inertial InstrumentsDING Heng-gao,WANG Shou-rong,HUANG Qing-an,QIU An-ping,WAN De-jun,ZHOU Bai-ling,SU Yan(Southeast University, Nanjing 210096, China)Abstract:In this paper, the research and development for the design and fabrication technique of micro inertial instruments are presented with emphasis on the fundamental theory. A viewpoint about the computer- integrated micro manufacture unit is proposed.Key words:micro inertial instrument; micromachined gyroscope; computer integrated micro manufacture unit (CIMMU)1 引 言 微惯性仪表,包括微机械加速度计、微机械陀螺和微惯性测量组合(MIMU),是一类重要的微机电系统(MEMS)。
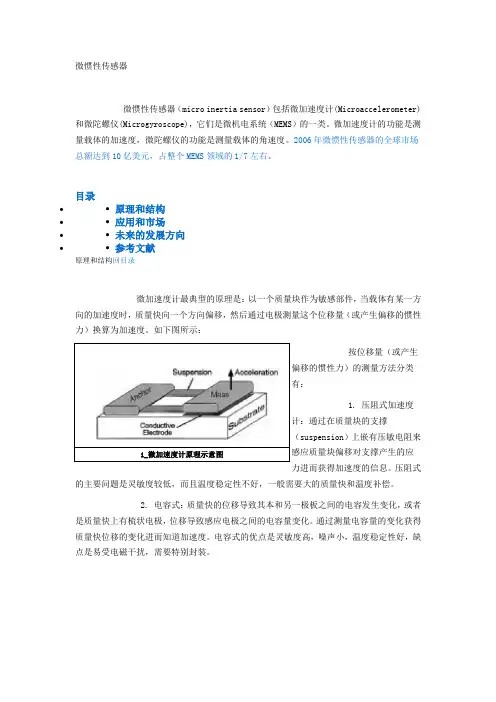
微惯性传感器微惯性传感器(micro inertia sensor)包括微加速度计(Microaccelerometer)和微陀螺仪(Microgyroscope),它们是微机电系统(MEMS)的一类。
微加速度计的功能是测量载体的加速度,微陀螺仪的功能是测量载体的角速度。
2006年微惯性传感器的全球市场总额达到10亿美元,占整个MEMS领域的1/7左右。
目录∙•原理和结构∙•应用和市场∙•未来的发展方向∙•参考文献原理和结构回目录微加速度计最典型的原理是:以一个质量块作为敏感部件,当载体有某一方向的加速度时,质量快向一个方向偏移,然后通过电极测量这个位移量(或产生偏移的惯性力)换算为加速度。
如下图所示:偏移的惯性力)的测量方法分类有:1. 压阻式加速度计:通过在质量块的支撑(suspension)上嵌有压敏电阻来感应质量块偏移对支撑产生的应力进而获得加速度的信息。
压阻式的主要问题是灵敏度较低,而且温度稳定性不好,一般需要大的质量快和温度补偿。
2. 电容式:质量快的位移导致其本和另一极板之间的电容发生变化,或者是质量快上有梳状电极,位移导致感应电极之间的电容量变化。
通过测量电容量的变化获得质量快位移的变化进而知道加速度。
电容式的优点是灵敏度高,噪声小,温度稳定性好,缺点是易受电磁干扰,需要特别封装。
3. 隧道电流式:通过在活动部件上添加一个隧穿针尖和另一个电极之间通有隧穿电流。
当载体具有加速度时,活动部件的位移会导致隧道电流的剧烈变化(典型的是位移变化一个埃——10^-10米,隧道电流变化一倍),通过测量隧道电流可以获得很高的加速度的感应灵敏度,而且由于质量快可以做的很小,因此器件的体积很小,缺点是低频噪声很大,供电电压较高(上百伏)。
4. 谐振性力来改变另一根梁的轴向应力进而改变梁的共振频率。
通过共振频率的测量就可以获得加速度的信息。
5. 热传感式:质量块的位移改变质量块和散热之间的间距进而改变质量快的温度,通过测量温度的变化来感知加速度。
基于MEMS技术的微型惯性导航系统的设计与实现微型惯性导航系统(Micro Electromechanical Systems Inertial Navigation System,MEMS INS)是一种新型的惯性导航系统,它的出现解决了传统惯性导航系统的缺陷。
传统的惯性导航系统因其体积大,重量重,定位精度低等缺陷,限制了其在军事、航空等领域的应用。
而MEMS INS仅有传统系统的十分之一左右的体积,重量也仅有十分之一,定位精度却能达到0.01%。
因此,该系统已逐渐得到广泛的应用,包括医疗器械、航空器、移动设备等领域。
本文将介绍如何设计实现一款基于MEMS技术的微型惯性导航系统。
一. MEMS技术的概述MEMS技术是一种将微型机械系统与电路系统相结合的技术,通过微电子加工技术,在微米尺度制造出微小的工作元件。
MEMS技术广泛应用于航空、军事、医疗等领域,其制造工艺和器件设计都较为复杂。
MEMS惯性传感器是MEMS技术中的一种重要应用,由三轴陀螺仪和三轴加速度计组成,它们能够测量物体的姿态和运动状态,并根据运动状态计算出物体的位置和速度。
二. 微型惯性导航系统的组成和原理微型惯性导航系统由MEMS惯性传感器、微处理器、GPS等部分组成。
其中,MEMS惯性传感器主要负责测量物体的姿态和运动状态,微处理器则负责计算物体的位置和速度,而GPS则可用于补偿MEMS惯性传感器的漂移误差。
微型惯性导航系统的工作原理是:通过测量加速度计和陀螺仪所感知的经纬度、角度以及高度等数据,将数据传输给微处理器进行分析和处理,得到航向、坐标、速度等导航信息,在不借助外部参考的情况下准确导航。
三. 微型惯性导航系统的设计和实现(1)系统设计在设计MEMS INS之前,需要确定以下参数:A.系统精度:在众多因素的影响下,系统的精度是十分重要的设计参数。
精度与成本也有很大的关系,因此控制规模,将测量错误最小化是一款惯性导航系统最重要的要求。
基于SOI技术的MEMS惯性加速度计摘要:SOI技术材料具有寄生PN效应小、电子迁移速度高、功耗低、抗干扰能力强、稳定性好等特点,将其运用于MEMS惯性器件可以有效改微惯性善器件的反应速度、功耗、精度和稳定性等方面的性能。
本文主要介绍了三部分内容:一、基于SOI技术的电容式微加速度计的结构设计,选择使用梳齿偏置式U型折叠梁结构;二、本电容微加速度计的各主要结构的仿真及优化设计,使用Ansys对结构的尺寸进行仿真优化,运用理论推导确定电容梳齿的数目及极板间距离;三、本SOI技术电容微加速度计的工艺设计及工艺加工流程,给出了SOI材料的制作工艺流程以及对SOI材料加工刻蚀的工艺流程。
一、概述MEMS惯性加速度计的研究就是惯性器件最重要的研究内容之一。
硅微加速度计是一种重要的力学传感器,是最早研究的微机械惯性传感器之一。
由于集成在硅片上的加速度计具有体积小、重量轻、易于测试或控制电路集成等许多优点,且依据其近几十年来的发展,硅微加速度计的研究得到了越来越广泛的关注和重视,特别是世界经济强国己经广泛开展了MEMS在军事领域的研究工作。
目前世界主流的发展趋势倾向于采用微电子机械系统MEMS技术的微加速度计和陀螺仪,它们是MEMS领域一个重要分支的微惯性测量组合MIMU(Micro Initial Measurement Unit)系统的核心和关键部件,决定了惯性导航和运动载体的控制。
惯性加速度计具有不受电磁干扰、完全自主、精度高、安全可靠和实时性能好等优点,在军用航天载体和民用相关领域获得了广泛应用和发展。
目前由于洲际导弹弹体内唯一可检测的物理量是载荷加速度口,所以惯性加速度计直接决定了武器引信的精确性和可靠性,对其进行详细研究和开发具有十分重要和潜在的价值体现。
依据其具有的这些性能稳定、故障率低、性能一致性好等特点,惯性加速度计在惯性测量系统中具有重要的发展应用前景,在本世纪初已开始大批量的生产,并应用于导航、制导、控制、测量等军用及民用的诸多领域。