天文数据处理方法 平滑与滤波 Vondrak
- 格式:pdf
- 大小:1.97 MB
- 文档页数:26
globk卡尔曼滤波、平差流程及相关公式,特别是解算哪些状态
量
GLObal Kalman (GLOBK) 是一种经典的卡尔曼滤波技术,用于对全球定位系统(GPS)观测数据进行精确的平差和解算。
它可以估计包括位置、速度、钟差、大气延迟等在内的多种状态量。
GLOBK的平差流程一般分为以下几个步骤:
1. 预处理:对GPS观测数据进行预处理,包括剔除异常值、修正电离层延迟等。
2. 初始状态估计:使用初始条件估计状态向量的初始值,包括位置、速度、钟差等。
3. 状态预测:根据系统的动态模型,通过预测状态转移矩阵和过程噪声协方差矩阵,预测下一个时刻的状态向量。
4. 观测更新:根据GPS观测数据和测量模型,计算观测矩阵和测量噪声协方差矩阵,并通过卡尔曼增益对状态向量进行更新。
5. 迭代优化:通过迭代更新步骤3和4,直到满足收敛条件为止,得到最优的状态估计结果。
相关公式包括:
1. 状态预测公式:
X(k+1|k) = F(k) * X(k|k) + G(k) * w(k)
其中,X(k+1|k)是下一个时刻的状态向量的预测值,X(k|k)是当前时刻的状态向量的估计值,F(k)是状态转移矩阵,G(k)是过程噪声协方差矩阵,w(k)是过程噪声。
2. 观测更新公式:
X(k|k) = X(k|k-1) + K(k) * (Y(k) - H(k) * X(k|k-1))
其中,X(k|k)是当前时刻状态向量的估计值,K(k)是卡尔曼增益,Y(k)是GPS观测数据,H(k)是观测矩阵。
解算的状态量包括位置、速度、钟差等。
通过卡尔曼滤波,可以准确估计这些状态量,并提供相应的协方差矩阵用于评估其精度。
天文观测数据的模型拟合和分析方法引言天文学是研究天体物理现象和宇宙结构的科学,而天文观测数据的模型拟合和分析是天文学研究中至关重要的一环。
通过对观测数据的精确分析,我们可以深入了解宇宙中的各种天体现象,推进我们对宇宙的理解和认识。
一、观测数据的收集与整理天文观测数据的收集通常以天文观测设备(如望远镜、射电望远镜等)为载体进行。
观测数据的整理是为了方便后续的模型拟合和分析。
在整理过程中,首先需要将原始数据进行仪器响应的校准,以消除仪器系统误差的影响;其次,还要考虑天文观测数据中可能存在的噪声(如热噪声、相位噪声等),以及随时间和空间改变的环境因素,进行相应的去噪和纠正操作。
二、模型拟合方法1. 经典曲线拟合经典曲线拟合是最常用的一种模型拟合方法。
通过选取适当的数学模型,如多项式、指数曲线等,对观测数据进行最小二乘拟合。
经过拟合后,可以得到符合观测数据特征的曲线,从而推断出其中的规律和趋势。
2. 非参数拟合方法非参数拟合方法不需要预设数学模型,而是根据观测数据的分布特点进行模型拟合。
如核密度估计(KDE),通过计算观测数据点周边的核密度来估计概率密度函数的形状。
3. 参数拟合方法参数拟合方法则需要通过已知的数学模型来进行拟合。
常见的参数拟合方法有最大似然估计、贝叶斯统计方法等。
这些方法可以通过拟合参数的最优值来优化模型,提高拟合的准确性和可靠性。
三、模型拟合的准确性评估与分析模型拟合的准确性评估是分析结果可靠性的重要环节。
常用的评估方法有残差分析和拟合优度检验。
残差分析通过计算模型预测值与实际观测数据之间的差异,来评估模型的准确性。
而拟合优度检验则是通过计算模型拟合平均残差与原始数据的差异,来评估拟合效果。
这些评估指标能够帮助我们判断模型拟合是否符合实际观测数据的特征,并为进一步分析提供依据。
四、分析方法在模型拟合的基础上,我们可以通过分析模型参数、函数关系及其物理意义等方法,来深入理解天文观测数据背后的物理过程与规律。
天文数据处理方法天文数据处理是天文学的重要分支,其主要目的是从天文观测数据中提取并分析有关天体的信息,以便更好地了解天体的特性和演化。
天文数据处理方法包括数据获取、数据清理、数据校准、数据筛选、数据分析等步骤,下面将详细介绍各个步骤的方法和技巧。
一、数据获取1. 观测记录法:通过天文望远镜、探测器等设备的观测记录获取原始数据。
2. 数字文件下载法:通过网络等渠道下载相关天文观测数据文件。
3. 个人记录法:天文学家自己进行的观测记录和文献资料。
在获取数据时需要注意数据的来源、格式、质量等方面的问题,及时对数据进行备份和整理,便于后续的数据处理和分析。
二、数据清理在得到原始数据后,需要进行数据清理,从中去除不合理的数据和噪声,以获取更可靠的结果。
数据清理的方法如下:1. 异常值检测:通过检查数据中是否存在异常值来筛选掉不合理的数据。
2. 噪声滤除:通过信噪比等技术滤除数据中的噪声,提高数据的可靠性。
3. 重复数据去除:去除重复的数据,避免对后续分析造成影响。
4. 缺失数据填补:对于缺失的数据,可以通过差值法或插值法等方法进行填补。
三、数据校准数据校准是为了保证数据的精度和准确性,对数据进行校准可以消除一些系统误差和仪器偏差。
数据校准的方法如下:1. 零点校准:通过调节仪器的零点来消除系统误差。
2. 线性校准:对于存在线性误差的数据,通过对数据进行线性拟合来消除误差。
3. 背景校准:对于存在背景噪声的数据,需要进行背景减法。
四、数据筛选数据筛选是为了滤掉不需要的数据和不合理的数据,从而得到更加精确和合理的数据。
数据筛选的方法如下:1. 范围筛选:根据数据的范围,筛选出符合条件的数据。
3. 精度筛选:针对需要高精度数据的应用,通过对数据进行提高精度的处理来筛选出满足需求的数据。
五、数据分析数据处理完成后,需要进行数据分析,以便对数据进行更加深入和全面的了解。
数据分析的方法如下:1. 基本统计分析:通过对数据的平均值、标准差、方差等基本统计参数的计算和分析来了解数据的分布和特征。

Value Engineering0引言在我国军事和航天领域中,导航定位和授时系统在北斗信息服务中占据着越来越重要的地位。
而时钟同步是精密授时的根本保证[1]。
铷钟短期稳定度较好,是常用的同步原子时钟[2-4]。
时间统一系统包含时统中心和若干时统分中心,是为测控系统提供统一标准时间信号和标准频率信号的系统,其设备由无线电接收机、原子频率标准、标准信号发生器和放大分配设备组成,无线电接收机通过接收卫星信号校准本地铷钟频率[5]。
世界各国以性能优异的原子钟建立并保持着本国的时间体系。
高精度时间统一系统设备作为授时设备,能够通过不同的链路接口对不同的设备进行授时。
本文分析了一种北斗时统设备铷钟驯服技术,该技术基于FPGA 获取铷钟钟频差值,并利用vondrak 滤波和kalman 滤波算法对钟差值进行处理,然后利用PID 控制算法对铷钟电压进行控制,调节铷钟频率,实现时间同步、提高守时设备精度。
1铷钟驯服技术实现原理铷钟驯服技术由FPGA 和MCU 实现。
FPGA 根据时间间隔测量原理,计算北斗接收机的秒脉冲与铷钟分频的秒脉冲差值,并采用kalman 算法和vondrak 算法联合对此钟差值滤波,再通过uart 发给MCU ;MCU 通过PID 控制算法,对DAC 转换芯片进行精准的电压控制,从而准确地改变铷钟频率,达到驯服铷钟的目的。
1.1时间间隔测量原理时间间隔测量由FPGA 实现,原理如图1所示,T X 为测量时间间隔值,T 0为采用时钟计数法计算出的时间间隔值,计数法存在量化误差:T 1(开始信号与计数时钟信号不同步部分)和T2(结束信号与计数时钟信号不同步部分),关系如下:(1)T 1和T 2两值可由时间-幅度转换法计算。
计数法参考时钟为铷钟倍频的100MHz 时钟,若其在由开始信号和结束信号构成的时间闸门内计得时钟个数为N 0,则T 0=N 0×T ,这里T 为10ns 。
若时间闸门内时钟个数理论值为N ,则钟差值为:±(N-N 0)/T X 。
维纳滤波反褶积维纳滤波反褶积是数字信号处理中一种重要的滤波技术,它可以帮助我们恢复由于褶积模糊造成的图像模糊。
在本文中,我将详细介绍维纳滤波反褶积的原理和应用。
一、维纳滤波反褶积的原理维纳滤波反褶积是一种通过对图像进行反褶积和滤波来恢复原始图像的方法。
根据维纳滤波反褶积的定义,它可以被定义为一种优化滤波方法,旨在通过最小化重建图像与理论模型之间的误差来恢复模糊图像的清晰度。
具体来说,维纳滤波反褶积利用噪声模型、图像抖动以及空间频率响应函数等信息来计算一个最佳的滤波器,该滤波器可以最小化图像退化过程所引起的噪声和失真。
通过使用正则化技术,维纳滤波反褶积可以对噪声和信号之间的平衡进行调整,并以最小化总方差为目标来选择最佳的滤波器。
二、维纳滤波反褶积的应用维纳滤波反褶积广泛应用于遥感图像处理、医学成像、地震学、天文学等领域,在这些领域中需要准确的图像重建和图像去噪。
例如,在医学成像中,由于诸如运动伪影、伽马射线散射等因素而导致的图像模糊,会严重影响诊断的准确性。
因此,维纳滤波反褶积可以帮助医生恢复丢失的细节并提高图像质量。
此外,维纳滤波反褶积还在工业品质检测、机器视觉等领域中得到了广泛应用。
例如,在制造业中,图像模糊可能会导致产品质量问题,而维纳滤波反褶积可以找到并消除这些模糊。
三、维纳滤波反褶积的优缺点维纳滤波反褶积作为一种优化方法,在实践中仍然具有一些优缺点。
优点:维纳滤波反褶积可以通过最小化重建图像与理论模型之间的误差来恢复图像,因此它可以有效减少噪声和提高图像质量。
此外,该方法还具有灵活性,可以根据具体情况进行优化,例如可以通过修改正则化参数来调整噪声和信号之间的平衡。
缺点:像维纳滤波反褶积这样的优化问题通常需要进行计算,因此需要一些计算资源和时间。
此外,在图像中存在大量噪声时,维纳滤波反褶积可能会变得复杂和不稳定。
四、总结总体而言,维纳滤波反褶积是一种强大的数字信号处理技术,能够在图像模糊处理、去噪等方面发挥重要作用。
滤波分析的用法
大气运动是多种时间和空间尺度的系统组成的,空间尺度与时间尺度有基本上对应的关系,空间尺度越人的系统时间也会越人,或活动周期越长。
因此,人气运动系统中的气象变量序列通常都包含若复杂的周期成分,具有多尺度特征。
如,年、季、月、周、口的平均气温、海温、气压等等。
不同气象要素的规则或不规则振荡周期是不同的,在指定尺度下某些规则周期占有的分量不同。
由于研究日的不同,经常需要将我们感兴趣的周期成分从原序列中识别和提取出来,或把不感兴趣的周期成分从原序列中去掉,这一过程就是序列滤波。
滤波是分离不同频带大气变化和分离各种天气尺度系统,研究其对天气的不同影响及各种尺度系统间的相互作用的常用方法。
数字滤波器原理
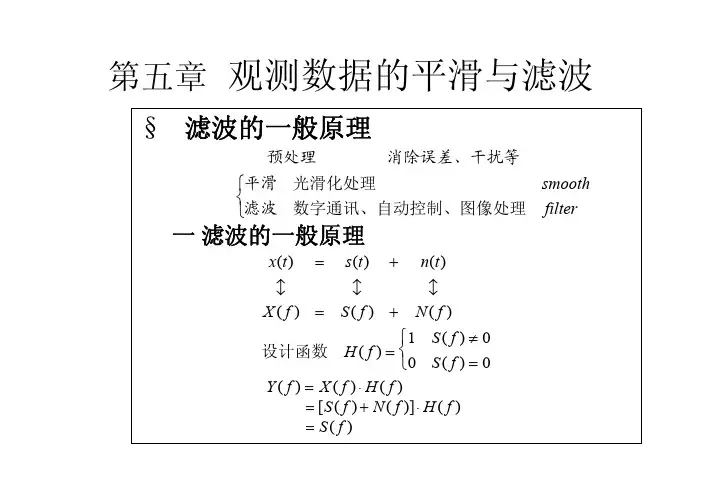
从数学角度上看,滤波过程实际上是原始序列经过一定的变换转化为另一序列的过程。
时间序列使用的是数字滤波器,它是一个线性运算系统,从输入的时间序列(时间函数)x(t),后到输出新的时间函数y(t),所经过运算是y()=∫c(k)x(t-k)dk 其中,c(k)是脉冲函数,也称为脉冲响应。
此外,称输入时间函数的谱为X(f),输
出时间函数的谱为Y(f),脉冲函数的谱为频率响应H(f),则有
通常对某一频率振动,通过过滤后,它的方差有所削减,其削减量就是输入与输出的功率之比。
在一般气象应用中,不希望滤波后产生位相移动,这要求argH(f)=0,这往是不
能完全做到的,实际应用中可先使H(f)虚部为0,并取偶函数c(-k)=c(k)以达到接近效果。
另外,实际应用中时间t时离散的等问距的,输入序列x的长度有限,则输出序列y可表达为有限项求和的形式。
卡尔曼滤波是一种利用线性系统状态方程,通过将系统状态预测值和观测值结合起来,对系统状态进行最优估计的方法。
在处理含有噪声或偏差的信号时,卡尔曼滤波结合其他估计值或测量值,可以得到更准确的观测值。
对于状态估计算法,可以获取状态量的三个值:状态预测值、最优估计值以及真实值,卡尔曼滤波的原理就是利用卡尔曼增益来修正状态预测值,使其逼近真实值。
特别提到的GLOBK程序,是GAMIT/GLOBK程序的主要组件,主要应用于GNSS数据处理。
该程序使用卡尔曼滤波的方式对GAMIT、GIPSY 和Bernese等产出的结果及经典大地测量和SLR观测数据进行处理,最后得到观测点的坐标、站速度、EOP参数和卫星的轨道参数等。
其平差流程包括:将单天解合并为多天解;将多天解合并为多年解,并估计测站速度;估计测站坐标重复性,进而评价多天观测解的精度。
卫星遥感影像处理的常用方法随着卫星遥感技术的不断发展和应用,卫星遥感影像处理已经成为了解地球表面特征和环境变化的重要手段。
在这个过程中,常用的方法及算法起到至关重要的作用。
本文将介绍几种常见的卫星遥感影像处理方法,包括图像增强、分类与识别、变化检测、目标提取等。
一、图像增强图像增强是改进和优化遥感影像质量的一种方法。
常用的图像增强方法包括直方图均衡化、滤波、拉普拉斯变换等。
直方图均衡化通过对图像的灰度直方图进行调整,使得图像的灰度分布更加均匀,从而增强图像的对比度。
滤波方法通过对图像的像素值进行平滑或增强,使图像更加清晰和易于分析。
拉普拉斯变换则用于边缘检测,通过计算图像中像素灰度的二阶导数,实现对图像边缘的提取。
二、分类与识别分类与识别是卫星遥感影像处理中的一个重要环节。
它可以将遥感影像中的像素分为不同的类别,从而实现对地面特征的解译和分析。
常用的分类与识别方法包括监督分类、非监督分类和目标识别等。
监督分类是根据已知类别的训练样本进行分类,其分类准确度较高。
非监督分类是根据像素之间的相似性进行分类,但需要人工干预进行分类结果的解释。
目标识别则是通过特定的算法和规则,自动提取出遥感影像中的目标对象。
三、变化检测变化检测是比较两幅或多幅遥感影像之间的差异,以检测出地表特征和环境变化的方法。
常用的变化检测方法包括基于差异图的像素级差异检测、基于时间序列的统计分析以及基于分类方法的变化检测等。
像素级差异检测是通过计算两幅影像中像素灰度的差异值,来获得地表特征的变化信息。
时间序列分析则是基于多幅影像的时间序列数据进行统计分析,以检测出地表特征的长期变化趋势。
基于分类方法的变化检测则是通过对两幅影像进行分类,从而实现对影像中的变化区域的提取。
四、目标提取目标提取是将图像中的目标对象从背景中分割和提取出来的方法。
常用的目标提取方法包括基于阈值分割、基于纹理分析和基于形态学运算等。
阈值分割是通过设定不同的阈值来将影像中的目标与背景分离,但其结果受噪声的影响较大。
固定滞后平滑滤波方法全文共四篇示例,供读者参考第一篇示例:固定滞后平滑滤波方法(Fixed Lag Smoothing Filter)是一种常用的信号处理技术,主要用于对信号进行平滑处理,以便于提取出信号的趋势和周期性变化。
其原理是利用固定的时滞期对信号进行滤波,达到减少噪声干扰、提取信号特征的效果。
本文将对固定滞后平滑滤波方法的原理、应用及优缺点进行详细介绍。
一、固定滞后平滑滤波方法的原理固定滞后平滑滤波方法主要基于信号的历史数据进行滤波处理。
其基本原理是通过对输入信号进行滞后处理,然后对滞后处理后的信号进行加权平均,从而得到平滑后的输出信号。
滞后处理的时长决定了滤波器的滞后期,而加权平均的权重则决定了滤波器的平滑程度。
固定滞后平滑滤波方法最常用的滤波器类型是指数滤波器(Exponential Smoothing Filter)。
指数滤波器通过对输入信号进行加权平均,使得较早的信号数据对平滑后的输出数据影响逐渐减小,而较近期的信号数据对输出数据的影响逐渐增大,从而实现对信号的平滑处理。
二、固定滞后平滑滤波方法的应用固定滞后平滑滤波方法广泛应用于金融、经济、气象、工程等领域的信号处理和数据分析中。
在金融领域,固定滞后平滑滤波方法常用于股票价格、汇率、利率等时间序列数据的平滑处理,以便于分析其趋势和周期性变化。
在经济领域,固定滞后平滑滤波方法常用于对经济指标数据进行平滑处理,以便于预测经济趋势和制定政策。
在气象领域,固定滞后平滑滤波方法常用于对气象数据进行平滑处理,以便于预测气象变化和灾害监测。
在工程领域,固定滞后平滑滤波方法常用于对传感器数据进行平滑处理,以便于控制系统的稳定性和性能。
三、固定滞后平滑滤波方法的优缺点固定滞后平滑滤波方法具有以下优点:简单易实现,不需要复杂的数学模型和算法;对于平稳或近似平稳的信号具有较好的平滑效果;对于处理噪声干扰和突发事件具有一定的抑制效果。
固定滞后平滑滤波方法也存在一些缺点:对非平稳信号的平滑效果较差;滞后期的选择需要根据具体信号特点进行调整,容易受到滞后期选择不当而导致平滑效果不佳;对于突发事件的响应较慢,不能及时反映信号的变化。
使用测绘技术进行卫星遥感数据处理的技巧导语:卫星遥感数据处理是借助卫星遥感技术获取地球表面信息的一种方式,而测绘技术则是处理和分析这些数据的重要工具。
本文将给出使用测绘技术进行卫星遥感数据处理的一些技巧,包括数据预处理、计算机图像处理和地理信息系统的应用等。
第一节:数据预处理卫星遥感数据获取的过程中,会受到大气、地形和云层等因素的影响,因此需要进行数据预处理,以提高数据的质量和准确性。
1. 大气校正:利用大气校正模型,去除大气对图像的影响。
这可以通过获取大气参量并进行修正来实现,如大气校正模型MODTRAN和6S等。
2. 地形校正:将遥感数据与数字高程模型(DEM)结合,进行地形校正,以消除地形对图像的影响。
这可以通过利用DEM计算地形指数,如坡度、高程、植被指数等进行达到。
3. 云层去除:使用云层检测算法,将图像中的云层部分进行去除。
常用的算法包括亮度阈值法、比值阈值法和植被指数方法等。
第二节:计算机图像处理计算机图像处理是卫星遥感数据处理的重要环节,通过对图像进行增强、分类和分析,可以更好地理解和利用数据。
1. 图像增强:图像增强可以改善图像的视觉效果和细节,使其更具辨识度。
常用的增强方法包括直方图均衡化、滤波和波段合成等。
2. 图像分类:图像分类是将图像像素分为不同类别的过程,可以帮助我们识别和提取地物信息。
常用的分类方法包括基于像元的分类、基于对象的分类和基于深度学习的分类等。
3. 特征提取:特征提取是将图像中的信息转化为可量化的数值特征的过程。
利用特征提取可以提取出地物的形状、纹理、频谱等特征,为后续分析提供基础。
第三节:地理信息系统的应用地理信息系统(GIS)是将地理数据和信息进行存储、管理和分析的系统,对卫星遥感数据处理具有重要的应用价值。
1. 数据集成:将卫星遥感数据与其他地理数据集成在一起,可以帮助我们更好地理解数据,并进行综合分析。
常用的集成方法包括栅格数据与矢量数据的结合,以及卫星遥感数据与地面测量数据的融合等。
InSAR干涉图平滑方法比较InSAR干涉图平滑方法比较干涉合成孔径雷达(InSAR)是一种利用雷达波束对地表进行测量的技术。
通过测量雷达波束沿不同方向的相位差异,可以获取地表的高程信息。
然而,由于地表的复杂性和外界干扰的存在,InSAR图像往往存在噪声和杂散信号。
为了提高图像的质量和解释能力,需要对InSAR干涉图进行平滑处理。
在平滑InSAR干涉图时,有几种常用的方法可供选择。
下面将逐步比较这些方法:1. 均值滤波法:均值滤波法是最简单直观的平滑方法之一。
它将图像中每个像素点周围的像素值取平均,然后用该平均值替代原像素值。
这种方法可以有效减小噪声,但对图像细节的保留较差,容易模糊图像。
2. 中值滤波法:中值滤波法是一种非线性平滑方法,它将每个像素点周围的像素值排序,取中值作为新的像素值。
相比于均值滤波法,中值滤波法能够更好地保留图像边缘和细节信息,对于脉冲噪声的去除效果更好。
3. 高斯滤波法:高斯滤波法是一种基于高斯函数的线性平滑方法。
它通过对图像中每个像素点周围像素值进行加权平均,使得离该像素距离越远的像素权重越小。
这种方法能够平滑图像并保留边缘信息,但可能会导致图像细节的模糊。
4. 双边滤波法:双边滤波法是一种结合了空间域和灰度域信息的非线性滤波方法。
它通过考虑像素点之间的距离和像素值之间的相似性来进行加权平均。
这种方法能够有效平滑图像并保留边缘和纹理信息,对于InSAR干涉图的平滑效果较好。
总体而言,不同的平滑方法适用于不同的情况。
均值滤波法简单易用,适用于去除比较强的高斯噪声;中值滤波法适用于去除脉冲噪声;高斯滤波法适用于平滑图像并保留边缘信息;双边滤波法适用于平滑图像并保留边缘和纹理信息。
根据需求和图像特点,可以选择合适的平滑方法进行处理。
需要注意的是,平滑InSAR干涉图时应避免过度平滑,以免造成误差或遮挡关键信息。
因此,在选择平滑方法时需要权衡图像质量和细节保留的程度。
最佳的平滑方法取决于具体应用和数据特点,可以通过对比不同方法对同一干涉图的平滑效果进行评估和选择。
速度平滑距离与Vondrak平滑方法在高精度测量中的比较应用于晴;耿虎军;郭肃丽【摘要】随着卫星定位以及测定轨精度的提高,需要研究厘米量级的高精度测距系统;针对现有测控系统测量距离值存在较大随机误差的问题,提出了一种基于速度对距离值进行平滑的方法,以减小测距随机误差,并将之与Vondrak平滑方法作了对比;为了保证速度的解算精度,给出了一种基于三阶锁相环路的跟踪接收方案,并对环路跟踪精度、速度平滑时间选择及优化等进行分析和仿真;仿真结果表明,新提出的接收方案和速度平滑距离方法能够实现对不同动态目标信号的有效跟踪,有效降低距离测量的随机误差,可为高精度航天测控系统提供一种解决思路.%With the improvement of satellite positioning and orbit determination,high accuracy ranging system in cm level is needed to study.To the question about the existing of big random error in normal measurement and control system,this paper proposes a method that using velocity value to smooth range in order to reduce the range random error,and compare it with the Vondrak smoothing method.For the calculating precision of velocity,this paper gives a tracking receiving scheme based on third order phase-locked loop,what's more,we carry on analysis and simulation about loop tracking accuracy and smoothing time.The simulation results show that the receiving scheme we proposed and the method of smoothing range using velocity can ensure the effective tracking with different dynamic target signal and can effectively reduce the pseudorangemeasurement random error,it can provide a solution for high precision aerospace measurement and control system.【期刊名称】《计算机测量与控制》【年(卷),期】2017(025)011【总页数】5页(P34-38)【关键词】厘米级测距;三阶锁相环;测距随机误差;速度平滑距离;Vondrak平滑【作者】于晴;耿虎军;郭肃丽【作者单位】中国电子科技集团公司第五十四研究所,石家庄050081;中国电子科技集团公司第五十四研究所,石家庄050081;中国电子科技集团公司第五十四研究所,石家庄050081【正文语种】中文【中图分类】TP311.52随着卫星定位以及测定轨精度的提高,现有测距系统难以满足要求,研究更高精度的测距系统尤为必要。
Chandra天文望远镜数据处理流程天文系李兆升实验目的:对设备的观测物理量进行归算、分析,从而获得X射线源的位置、入社谱和光变规律。
如果用F表示待测谱,P表示仪器设备的响应函数,D代表观测的物理量,观测的数据就应该等于仪器的响应函数对待测谱的卷积:D=P*F (1.1) 由于这些量的统计特性,(1.1)式不可能用数学方法解出。
所谓数据归算方法就是由P, D推断出F的方法。
实验背景:当代X射线天文的观测数据处理有几个重要特点,一是数据的开放度大大提高,二是发展了大型专用软件集或者与软件集的专用接口,例如,美国国立天文台的IRAF软件集,美国卢瑟福实验室的STRALINK软件集,分别成为英、欧、美世界各国采用的标准天文数据处理软件集,而几乎每一个重要的X射线天文设备都有自己的专用软件包,并依托在上的一个标准的专用软件环境上,如EXOSAT卫星的XSPEC等。
这就使得原始数据处理可以完全工程化,对常规的谱分析、空间定位和光变分析,分析者就可以直接调用软件,不必自己直接编写程序。
三是围绕每一个设备,都用专用的观测数据库,或称数据银行。
天文界用统一的格式存放这些数据,叫做FITS格式,每一个专用软件集都可以直接阅读FITS数据。
实验原理:1)观测量及其特点X射线天文中的观测量,通常都是量子化的,尤其是在硬X射线波段,观测以一个个高能光子为单位,探测器直接记录下每个进入仪器的光子的能量损失、入射方向和到达时间,或定时累积的能损谱、位置分布图等。
观测设备必须经过标定数据处理才得以进行。
2)本底和背景英语中使用的background,事实上包括本底和背景两方面的内容。
以空间定位为目的的观测,对一待定方向或点源的观测计数,除了来自观测对象的计数外,其中掺杂着仪器视场中所以方向的辐射进入视场的附加计数,通常被称为背景,这类背景主要由弥漫X射线背景成分构成,有时还包括辐射带区的带点粒子背景(fb),或者地球进入望远镜视场后地球大气反照X射线背景成分。