基于STM32的WIFI视频监控智能小车
- 格式:doc
- 大小:144.50 KB
- 文档页数:5

《基于STM32的智能小车研究》篇一一、引言随着科技的进步和智能化设备的广泛应用,智能小车已成为人们生活中不可或缺的一部分。
基于STM32的智能小车凭借其卓越的硬件性能、高效的运算速度以及灵活的扩展能力,在各种应用场景中展现出强大的优势。
本文旨在探讨基于STM32的智能小车的设计原理、技术特点及其在多个领域的应用。
二、STM32简介STM32系列微控制器由意法半导体公司生产,广泛应用于嵌入式系统中。
该微控制器具备高性价比、高性能以及丰富的资源优势,成为众多研发人员首选的硬件平台。
基于STM32的智能小车,通过搭载传感器、执行器等设备,实现智能化的导航、避障等功能。
三、智能小车设计原理1. 硬件设计:智能小车的硬件设计主要包括STM32微控制器、电机驱动模块、传感器模块(如超声波传感器、红外传感器等)、执行器等部分。
这些硬件设备通过STM32微控制器的控制,实现小车的智能化运行。
2. 软件设计:智能小车的软件设计主要基于嵌入式操作系统或实时操作系统,实现对硬件设备的控制以及任务调度等功能。
软件设计应具备高效、稳定、可扩展的特点,以满足不同应用场景的需求。
四、技术特点1. 智能化:基于STM32的智能小车可实现自动导航、避障等功能,具备高度自主化特性。
2. 高效性:STM32微控制器的高性能和高效的运算速度,使智能小车能够快速响应环境变化,实现实时控制。
3. 灵活性:智能小车具备丰富的接口资源,可方便地扩展其他功能模块,如摄像头、通信模块等,以满足不同应用场景的需求。
4. 稳定性:智能小车的软件设计采用嵌入式或实时操作系统,具备较高的稳定性和可靠性,确保小车在复杂环境中能够稳定运行。
五、应用领域1. 物流配送:基于STM32的智能小车可应用于物流配送领域,实现自动化货物运输,提高物流效率。
2. 巡检工作:智能小车可应用于工厂、仓库等场所的巡检工作,提高工作效率和安全性。
3. 自动驾驶:在自动驾驶领域,智能小车可实现自动驾驶功能,提高交通安全性和道路利用率。

摘要本次试验主要分析了基于STM32F103微处理器的智能小车控制系统的系统设计过程.此智能系统的组成主要包括STM32F103控制器、电机驱动电路、红外探测电路、超声波避障电路.本次试验采用STM32F103微处理器为核心芯片,利用PWM技术对速度以及舵机转向进行控制,循迹模块进行黑白检测,避障模块进行障碍物检测并避障功能,其他外围扩展电路实现系统整体功能。
小车在运动时,避障程序优先于循迹程序,用超声波避障电路进行测距并避障,在超声波模块下我们使用舵机来控制超声波的发射方向,用红外探测电路实现小车循迹功能.在硬件设计的基础上提出了实现电机控制功能、智能小车简单循迹和避障功能的软件设计方案,并在STM32集成开发环境Keil下编写了相应的控制程序,并使用mcuisp软件进行程序下载。
关键词:stm32;红外探测;超声波避障;PWM;电机控制AbstractThis experiment mainly analyzes the control system of smart car based on microprocessor STM32F103 system design process。
The composition of the intelligent system mainly including STM32F103 controller, motor drive circuit, infrared detection circuit, circuit of ultrasonic obstacle avoidance。
This experiment adopts STM32F103 microprocessor as the core chip, using PWM technique to control speed and steering gear steering,tracking module is used to detect the black and white, obstacle avoidance module for obstacle detection and obstacle avoidance function, other peripheral extended circuit to realize the whole system function。
一种基于STM32单片机的视频遥控小车的设计随着各种科学技术的不断提高,自动化技术的不断加深,智能遥控技术将跨领域应用,并深入普及。
机器人小车的研究是移动机器人分支的一部分,是一项涉及到计算机技术、传感技术、通讯技术等相关技术的综合系统。
它的主要功能是利用无线网络视频技术实现识别路径,控制车速及操纵转向等。
小车采用STM32单片机作为主制器,通过一款Wifi射频模块RT5350实现远程视频画面的传输,整个项目涵盖的知识面广,包括单片机编程技术,OpenWrt路由器系统以及Windows上位机软件开发等等不同技术领域。
下面分为三个层面来介绍视频小车的实现方法:(1)底层驱动层:以STM32单片机实现对小车的驱动控制;(2)中层传输层:借助RT5350路由器平台传输控制命令以及视频流;(3)顶层控制层:在Windows平台实现对小车的控制。
1、底层驱动层小车整体是实现STM32单片机控制小车电机的运动和控制摄像头的舵机云台的运动。
由于STM32单片机提供的电流非常微小,不足以让小车动起来,所以需要电机驱动模块,这里使用了L298N模块驱动小车的直流电机。
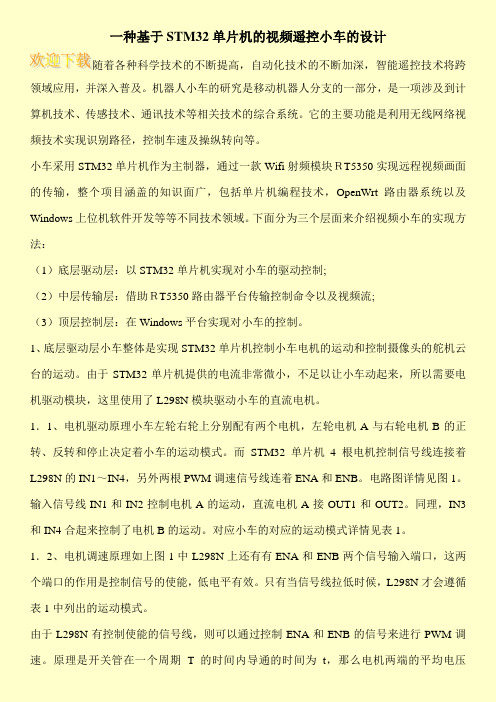
1.1、电机驱动原理小车左轮右轮上分别配有两个电机,左轮电机A与右轮电机B的正转、反转和停止决定着小车的运动模式。
而STM32单片机4根电机控制信号线连接着L298N的IN1~IN4,另外两根PWM调速信号线连着ENA和ENB。
电路图详情见图1。
输入信号线IN1和IN2控制电机A的运动,直流电机A接OUT1和OUT2。
同理,IN3和IN4合起来控制了电机B的运动。
对应小车的对应的运动模式详情见表1。
1.2、电机调速原理如上图1中L298N上还有有ENA和ENB两个信号输入端口,这两个端口的作用是控制信号的使能,低电平有效。
只有当信号线拉低时候,L298N才会遵循表1中列出的运动模式。
由于L298N有控制使能的信号线,则可以通过控制ENA和ENB的信号来进行PWM调速。
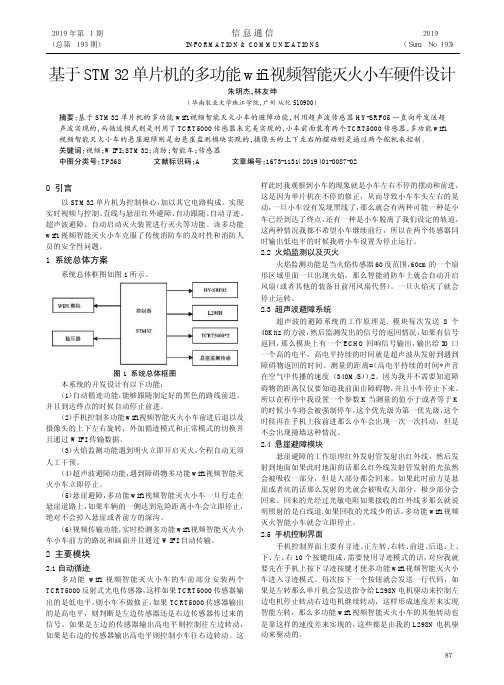
87基于STM32单片机的多功能wifi 视频智能灭火小车硬件设计朱明杰,林友坤(华南农业大学珠江学院,广州从化510900)摘要:基于STM32单片机的多功能wifi 视频智能灭火小车的避障功能,利用超声波传感器HY-SRF05一直向外发送超声波实现的,而循迹模式则是利用了TCRT5000传感器来完美实现的,小车前面装有两个TCRT5000传感器,多功能wifi 视频智能灭火小车的悬崖避障则是由悬崖监测模块实现的,摄像头的上下左右的摆动则是通过两个舵机来控制。
关键词:视频;WIFI ;STM32;消防;智能车;传感器中图分类号:TP368文献标识码:A 文章编号:1673-1131(2019)01-0087-020引言以STM32单片机为控制核心,加以其它电路构成。
实现实时视频与控制、直线与悬崖红外避障、自动跟随、自动寻迹、超声波避障、自动启动灭火装置进行灭火等功能。
该多功能wifi 视频智能灭火小车克服了传统消防车的及时性和消防人员的安全性问题。
1系统总体方案系统总体框图如图1所示。
图1系统总体框图本系统的开发设计有以下功能:(1)自动循迹功能,能够跟随制定好的黑色的路线前进。
并且到达终点的时候自动停止前进。
(2)手机控制多功能wifi 视频智能灭火小车前进后退以及摄像头的上下左右旋转,外加循迹模式和正常模式的切换并且通过WIFI 传输数据。
(3)火焰监测功能遇到明火立即开启灭火,全程自动无须人工干预。
(4)超声波避障功能,遇到障碍物多功能wifi 视频智能灭火小车立即停止。
(5)悬崖避障,多功能wifi 视频智能灭火小车一旦行走在悬崖道路上,如果车辆的一侧达到危险距离小车会立即停止,绝对不会掉入悬崖或者前方的深沟。
(6)视频传输功能,实时检测多功能wifi 视频智能灭火小车小车前方的路况和画面并且通过WIFI 自动传输。
2主要模块2.1自动循迹多功能wifi 视频智能灭火小车的车前部分安装两个TCRT5000反射式光电传感器,这样如果TCRT5000传感器输出的是低电平,则小车不做修正,如果TCRT5000传感器输出的是高电平,则判断是左边传感器还是右边传感器传过来的信号。

基于STM32精准识别-万向运动无线智能小车云台万向运动无线智能小车是一款集传输、控制、视频监控于一体的智能设备。
其核心部分是STM32单片机,可以实现高精度的运动控制和数据处理。
本文将介绍如何使用STM32实现精准识别功能,进一步提高小车的智能化水平。
一、识别技术的应用识别技术作为人工智能领域的重要组成部分,已经被广泛应用在各个领域。
在智能小车中,识别技术可以使其更加智能化,实现自主导航、人脸识别等功能。
例如,在小车的导航中,可以通过识别路标、障碍物等来进行路径规划和避障操作,从而实现小车的自动导航。
在视频监控中,可以通过识别人脸来进行身份识别,提高安全性和便利性。
二、基于STM32的识别技术实现STM32单片机作为智能小车的控制核心,具有高性能、低功耗等特点,适合于实现精准识别技术。
下面介绍两种实现方法:1.使用图像处理算法通过摄像头采集图像,利用图像处理算法对图像进行处理,从而实现目标识别。
常用的图像处理算法有边缘检测、模板匹配、颜色识别等。
例如,可以通过颜色识别算法实现对红色物体的识别,从而实现小车在追踪红球的过程中自主行走。
2.使用神经网络算法神经网络算法是一种模拟人脑神经元工作方式的算法,可以在处理大量数据的同时实现识别功能。
在小车的识别中,可以通过训练神经网络实现对目标的识别。
例如,在实现人脸识别功能时,可以利用神经网络算法训练模型,从而实现对人脸的识别和认证功能。
三、总结精准识别技术是实现智能小车的重要手段之一,可以帮助小车实现自主导航、人脸识别等功能。
在STM32的支持下,可以实现高精度的识别和控制操作,从而提高小车的智能化水平。
未来,随着人工智能技术的不断发展,精准识别技术将在更多领域发挥巨大的作用。

【项⽬实战】基于STM32单⽚机的智能⼩车设计(有代码)【1】背景意义近些年随着国民⽣活⽔平的提升,以⼩车为载体的轮式机器⼈进⼊了我们的⽣活,尤其是在⼀些布线复杂困难的安全⽣活区和需要监控的施⼯作业场合都必须依赖轮式机器⼈的视频监控技术。
因此,基于嵌⼊式技术的⽆线通信视频监控轮式机器⼈应运⽽⽣。
由于它们与⼈类⼯作相⽐具有成本低廉、安全稳定的优点,⽬前已经在许多危险作业以及⼯业场合得到了⼴泛应⽤⽽且轮式机器⼈不需要像⼈那样采取过多的保护措施,因此轮式机器⼈更适合在危险困难的⼯作环境中⼯作。
然⽽轮式机器⼈在⾏驶中所能碰到的障碍很多,例如前部凸出物的碰触,后部凸出物的拖托,中部凸出物的顶举,特别还有垂直障碍和壕沟等,所以必须对轮式机器⼈的越障问题进⾏研究来解决类似问题。
针对复杂地形环境的巡检作业,设计⼀种基于wifi视频监控的智能⼩车。
基于STM32F103主控板搭建智能⼩车的控制系统,并采⽤模块化的设计思想编写控制系统程序,为能够在复杂地形下进⾏巡检作业的轮式机器⼈研究提供理论依据。
【2】总设计⽅案本课题利⽤STM32作为智能⼩车的主控制器来驱动智能⼩车的直流电机⼯作,电机驱动芯⽚采⽤L298N微型集成电路电机驱动芯⽚,配合STM32核⼼板使⽤实现四个直流电机运⾏和pwm软件调速,通过改变直流电机占空⽐的电压来改变平均电压的数值,从⽽改变电机的转速变化来驱动轮式机器⼈运⾏。
轮式机器⼈⾏驶的状态有:前进、后退、左转、右转和停⽌。
当轮式机器⼈在⾏驶过程中遇到障碍物,红外避障检测模块检测周围障碍物,轮式机器⼈⾃动停⽌或转向。
通过WIFI⽆线信号作为传输媒介,以上位机或⼿机作为控制端来控制机器⼈的运动以及将摄像头所拍摄的视频信息在控制端界⾯中显⽰,这样便可观察轮式机器⼈周围的环境并对机器⼈进⾏实时监控。
主要设计步骤有:(1)根据提出⽅案的功能需求对智能⼩车进⾏结构设计。
(2)根据主控制器的基本结构和特点,设计总体硬件电路模块。
基于STM32的无线视频监控防疫智能小车基于STM32的无线视频监控防疫智能小车随着2020年新冠疫情的爆发,全球范围内的疫情防控工作成为社会关注的热点。
传统的疫情防控手段难以满足大面积、高效率、低风险的需求,因此需要借助现代技术来解决这一难题。
本文将介绍一种基于STM32的无线视频监控防疫智能小车,以期为疫情防控工作提供一种新思路。
1. 系统架构基于STM32的无线视频监控防疫智能小车系统由硬件和软件两部分组成。
硬件部分包括STM32微控制器、摄像头、传感器、驱动电路等组件,软件部分包括控制程序、图像处理算法、通信协议等。
STM32微控制器作为系统的核心控制单元,负责接收传感器数据、控制电机驱动器,并与上位机进行通信。
2. 功能与实现2.1 视频监控智能小车搭载了高清摄像头,并通过STM32微控制器对摄像头进行控制和采集。
通过实时图像处理算法,对采集到的图像进行预处理,提取目标物体并进行识别。
将目标物体的位置信息及时传输到上位机,实现远程视频监控。
2.2 传感器监测智能小车上还配置了多种传感器,包括温湿度传感器、气体传感器等。
通过这些传感器,可以实时监测疫情防控工作中的重要参数,如温度、湿度、有害气体浓度等。
当温度或湿度超出设定范围时,系统会自动报警,提醒工作人员及时采取相应措施。
2.3 环境感知与避障智能小车还搭载了超声波传感器和红外传感器,用于环境感知和避障功能。
通过超声波传感器检测前方障碍物的距离,当距离过近时,系统会自动停车或选择绕行路线。
红外传感器可以有效识别地面上的黑线,从而实现自动跟踪功能。
2.4 无线通信智能小车通过无线通信模块与上位机进行数据交换。
上位机可以实时接收到小车传输的视频和传感器数据,并通过图形界面显示。
同时,上位机可以通过无线通信模块向小车发送控制指令,实现对小车的远程操控。
3. 应用前景基于STM32的无线视频监控防疫智能小车具有广阔的应用前景。
首先,在疫情防控过程中,可以将智能小车部署在重点区域,如机场、车站、商场等公共场所,实现对人群密集区域的监控。
基于STM32的无线视频监控智能小车设计无线视频监控智能小车是一种通过无线视频传输技术实现远程监控功能的智能小车。
本设计基于STM32微控制器,通过控制小车的运动和视频传输,实现对目标区域的实时监控。
本设计的主要硬件组成包括:STM32微控制器、电机驱动模块、摄像头模块以及无线通信模块。
STM32微控制器将作为整个系统的核心控制单元,用于控制小车的运动以及处理视频信号。
电机驱动模块用于控制小车的方向和速度,使其能够实现前进、后退、左转和右转等基本运动。
摄像头模块负责采集目标区域的图像,并将其传输给STM32微控制器进行处理。
无线通信模块用于将视频信号传输到远程监控端。
在软件设计方面,本设计主要包括两部分功能:小车的运动控制和视频信号处理。
小车的运动控制功能通过对电机驱动模块的控制实现。
STM32微控制器根据接收到的指令,通过电机驱动模块控制小车的转向和速度。
通过编程控制电机的转速和方向来实现小车的前进、后退、左转和右转等运动。
视频信号处理功能主要通过对摄像头模块的控制实现。
STM32微控制器通过与摄像头模块的通信,获取到目标区域的图像数据。
然后,利用图像处理算法对图像进行处理,例如目标检测、运动跟踪和图像压缩等。
最后,通过无线通信模块将处理后的视频信号传输到远程监控端。
本设计的优点是:1.控制灵活:通过对电机驱动模块和摄像头模块的精确控制,可以实现小车的精准运动和目标区域的准确监控。
2.实时性好:利用STM32微控制器的高性能和快速的数据处理能力,可以实现对图像数据的实时处理和传输。
3.扩展性强:基于STM32的设计可以方便地扩展其他功能模块,例如避障传感器或其他传感器模块,以增强小车的智能化能力。
此外,该设计还可以应用于许多领域,例如室内安防、无人仓库、无人巡检等。
通过无线视频监控智能小车,可以实现对远程目标区域的监控,提高安全性和有效性。
系统存在的不足之处包括:1.成本较高:因为需要使用较多的硬件模块,造成了系统成本的增加。
基于STM32的无线视频监控智能小车设计基于STM32的无线视频监控智能小车设计随着科技的不断进步和智能化的发展,无线视频监控系统正逐渐成为现代社会安全保障的重要手段之一。
为了提高监控系统的实时性和灵活性,本文设计了一款基于STM32的无线视频监控智能小车。
一、引言无线视频监控系统通过将摄像头安装在移动式平台上,能够实现对目标区域的即时监控。
不仅可以在需要时对监控范围内的情况进行远程观察,还可以根据需要调整监控设备的位置和角度。
为了实现这一智能监控功能,本文以STM32微控制器为核心,并结合无线通信技术,设计出了一种功能强大的无线视频监控智能小车。
二、硬件设计1. 硬件平台本设计选用STM32F407VET6微控制器作为主控芯片,其具有较高的性能和丰富的外设接口,能够满足监控小车的需求。
此外,还选用了高清摄像头、无线模块、电机驱动模块和电池供电模块等外围硬件设备。
2. 系统框架整个系统分为上位机和下位机两部分。
上位机负责监控界面的显示和控制信号的发送,下位机则负责接收控制信号并控制小车的运动,同时将摄像头拍摄的视频传输给上位机。
3. 视频传输为了实现无线视频传输,我们选用了2.4GHz的无线模块进行数据传输。
摄像头通过DSP进行图像处理,并以数字信号的形式传给STM32微控制器,经过压缩编码后通过无线模块传输给上位机。
上位机通过接收无线信号并解码,实现对监控画面的实时观察。
4. 姿态控制为了提高小车的稳定性和适应性,我们引入了姿态控制技术。
通过陀螺仪和加速度计等传感器获得小车的姿态信息,并通过PID控制算法对小车进行动态调整以保持平衡。
这样不仅可以防止小车发生倾倒,还可以使其在多种地形上灵活行驶。
三、软件设计1. 控制算法为了使小车具备智能导航和障碍物避免能力,我们采用了模糊控制算法。
通过图像处理技术分析监控范围内的实时图像,识别并计算出目标物体的位置和运动轨迹。
然后根据目标物体的距离和角度信息,利用模糊控制算法生成控制信号,实现小车的自主导航。
基于STM32的WIFI视频监控智能小车
作者:杜静周琪栋王晓安周立萍
来源:《科学与财富》2016年第10期
摘要:针对传统的智能小车只有循迹、避障和超声波测距等简单功能且实际应用效果并不理想,本文设计实现了一种高效的无线视频监控智能小车。
小车采用STM32主控芯片,集成多种高性能传感器,可以有效实现红外循迹、红外避障、自动跟随、边沿检测、超声波测距和超声波避障等多种功能。
小车带有WIFI模块,可以利用Android客户端或PC客户端来实现小车的无线控制。
试验表明,客户端采集到的视频画面较清晰,视频流传输速度较快,可以满足实时监控的要求。
关键词:智能小车;WIFI;视频监控;STM32
Abstract: In view of the traditional intelligent car only tracking, obstacle avoidance and ultrasonic ranging and other simple functions and practical application effect is not ideal, this paper design and implement an efficient wireless video surveillance intelligent car. The car uses the STM32 main control chip, integrated a variety of high performance sensors can effectively realize multi functions such as infrared tracking, obstacle avoidance, automatic tracking, infrared edge detection, ultrasonic ranging and ultrasonic obstacle avoidance. The car with WIFI module,wireless control can realize the car using Android client or PC client. Test results show that, the client acquisition to the video screen is clear, video streaming transmission speed faster, and can meet the requirements of real-time monitoring.
Keywords:intelligent small car; WIFI; video surveillance; STM32
1 引言
智能小车是一个集自动控制、环境监测、无线遥控等多种功能于一体的综合系统,目前以高级单片机为核心的移动机器人还存在处理数据局限、控制不稳定等不足之处,国内市场暂时还没有出现具有真正意义的跟随性智能载物小车[1-3]。
本文提出了一种基于STM32f105rbt6的嵌入式微处理器无线视频监控智能小车设计方案。
电机驱动芯片采用的是微型集成电路电机驱动芯片L298N,其稳定性较好[4]。
摄像头视频格式为MJPEG,此格式减少了WIFI模块的工作量;该无线智能小车是以WIFI作为数据传输信道,通过Android客户端和PC客户端等进行控制小车各种运动[5-6],以及将机器人摄像头采集到的视频显示在控制端屏幕上的机器人设备。
2 硬件设计
2.1 系统总体设计
系统总体设计可分为软件设计与硬件设计。
软件方面,PC客户端采用.net开发平台,编程语言为C#;Android 手机客户端采用Eclipse开发平台,编程语言为Java。
硬件方面,硬件设计主要是系统的电路设计,包括电机驱动模块设计、视频采集模块设计、无线通信模块设计等部分。
2.2 WIFI模块
控制端发出的指令通过TCP协议传输到WIFI模块,WIFI模块将接收到的数据直接从串口输出到主控板,主控板中的下位机程序对接收到的数据进行解析,进而设置电机驱动芯片引脚电平的高低,最后驱动电机转动。
主控制器将采集到的传感器信息通过WIFI模块传输到PC 控制端并显示,如主控制器将通过超声波测距模块采集到的距离信息传输到WIFI模块,然后再传输到控制端并显示。
另外,WIFI模块将摄像头采集到的视频直接传输到控制端,并不通过主控制器。
3 软件设计
3.1 下位机程序
主控板上电之后需先进行系统初始化设置,包括延时函数和串口的初始化。
系统采用三个定时器,定时器0用于红外遥控电视和产生PWM[7]信号控制舵机、定时器1指示主控板是否成功接收到WIFI模块传输的数据、定时器2用于计算超声波测距高电平持续的时间。
最后,程序进入while(1)循环,判断当前模式(无线控制模式或全功能模式)。
下位机程序结构图如图2所示。
3.2 PC控制端和Android 控制端
PC控制端程序采用Visual Studio 2012开发环境,使用C#语言。
PC控制端通过TCP向WIFI模块的2001端口发送控制数据,WIFI模块会自动转发到串口,从而发送给主控芯片。
上位机程序首先根据摄像头视频流的地址从WIFI模块读取出第一帧图像并进行解码,再将图像帧推送到显示控件上,然后使用线程循环的进行读取剩余帧,即实现摄像头视频流的读取。
Android 控制端程序采用Android开发环境,使用java语言。
当Android APP使用HTTPURLConnection对象打开视频流的请求连接后,WIFI模块会自动采集USB摄像头的视频,并通过8080端口传输到Android APP,Android APP接着进行视频解码;
4 系统测试
系统测试主要分为硬件测试和软件测试。
硬件测试主要是测试小车电机是否正常运转以及转速的调整,5个红外传感器和1个超声波传感器是否正常工作,WIFI模块是否正常启动和摄像头的驱动是否正常等。
软件测试主要是Android客户端和PC客户端是否能准确控制小车的各种运动状态以及与小车的无线通信是否正常。
在温度为20℃的室内测试小车的“自动跟随”功能,改变小车与被跟随物体的距离,分别测出系统的响应时间和跟随准确率,如表1所示。
5 结论
设计并实现了以STM32为主控芯片,集成多种高性能传感器的实时视频监控智能小车。
小车的控制分为全功能模式和无线遥控模式。
全功能模式可以准确实现红外循迹、红外避障、自动跟随、边缘检测、超声波测距等功能。
其中,自动跟随功能的系统响应时间小、跟随距离保持较准确。
无线遥控模式可以通过Android客户端和PC客户端实时遥控小车的各种运动以及摄像头转动的角度。
今后的工作是将客户端采集到的视频进行模式识别,如人脸识别、手势识别、火焰识别等,进一步实现高智能化视频监控。
参考文献
[1] 蔺瑞军. 基于嵌入式Linux的无线视频监控与调度系统设计和实现[D].中国科学院大学(工程管理与信息技术学院),2015.
[2] 徐成波,张常年.基于嵌入式Linux的移动机器人控制系统[J].单片机与嵌入式系统应用,2014,7:24-27.
[3] 刘巍. 基于STM32的小型排障智能车设计与实现[D].河北大学,2013.
[4] 雷红淼,程耀瑜. 基于L298N的直流电机驱动电路优化设计[J]. 数字技术与应用,2012,02:118+1
[5] 章隆彬,邱恒,马国荣.基于Android操作系统的XKI教育机器人平台设计[J].国外电子测量技术,2013,32(8):50-53. 20.
[6] 赵晓凤,张顺,周璟瑜,钟晓玲,何凌霄. 基于蓝牙小车的控制系统[J]. 电子科.
[7] 凌好,刘荣忠,郭锐,王宇波. 基于STM32的太阳自动跟踪控制系统的设计[J]. 计算机测量与控制,2012,02:383-385.。