第4章控制网平差
- 格式:ppt
- 大小:540.00 KB
- 文档页数:15

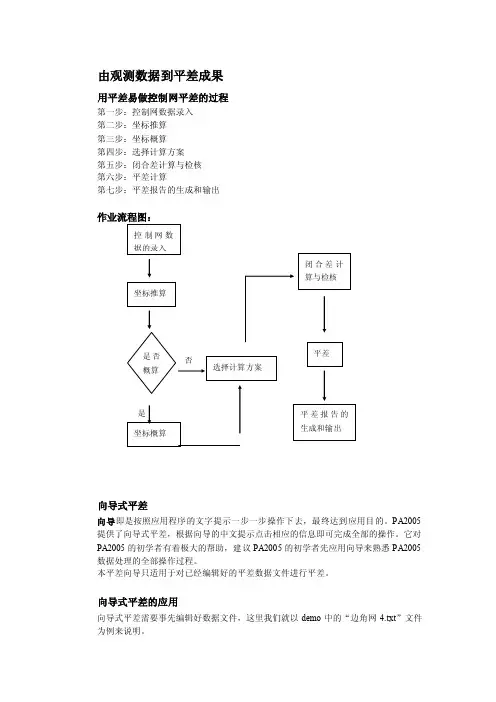
由观测数据到平差成果用平差易做控制网平差的过程第一步:控制网数据录入第二步:坐标推算第三步:坐标概算第四步:选择计算方案第五步:闭合差计算与检核第六步:平差计算第七步:平差报告的生成和输出作业流程图:向导式平差向导即是按照应用程序的文字提示一步一步操作下去,最终达到应用目的。
PA2005提供了向导式平差,根据向导的中文提示点击相应的信息即可完成全部的操作。
它对PA2005的初学者有着极大的帮助,建议PA2005的初学者先应用向导来熟悉PA2005数据处理的全部操作过程。
本平差向导只适用于对已经编辑好的平差数据文件进行平差。
向导式平差的应用向导式平差需要事先编辑好数据文件,这里我们就以demo中的“边角网4.txt”文件为例来说明。
第一步:进入平差向导首先启动“南方平差易2005”,然后用鼠标点击下拉菜单“文件\平差向导”。
如下图“平差向导”所示:平差向导请注意平差向导的中文提示和应用说明,并依据提示进行。
第二步:选择平差数据文件点击“下一步”进入平差数据文件的选择页面。
如下图“选择平差数据”所示:选择平差数据点击“浏览”来选择要平差的数据文件。
所选择的对象必须是已经编辑好的平差数据文件,如PA2005的Demo中“边角网4”。
对于数据文件的建立,PA2005 提供了两种方式,一是启动系统后,在指定表格中手工输入数据,然后点击“文件\保存”生成数据文件;二是依照附录A中文件格式,在Windows的“记事本”里手工编辑生成。
打开数据文件点击“打开”即可调入该数据文件。
如下图“调入平差数据文件”所示:调入平差数据文件第三步:控制网属性设置调入平差数据后点击“下一步”即可进入控制网属性设置界面,如下图:该功能将自动调入平差数据文件中控制网的设置参数,如果数据文件中没有设置参数则此对话框为空,同时也可对控制网属性进行添加和修改,向导处理完后该属性将自动保存在平差数据文件中。
点击“下一步”进入计算方案的设置界面。
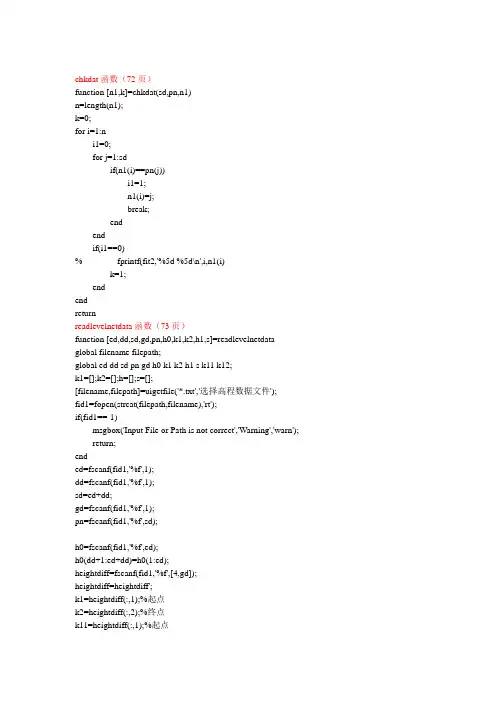
chkdat函数(72页)function [n1,k]=chkdat(sd,pn,n1)n=length(n1);k=0;for i=1:ni1=0;for j=1:sdif(n1(i)==pn(j))i1=1;n1(i)=j;break;endendif(i1==0)% fprintf(fit2,'%5d %5d\n',i,n1(i)k=1;endendreturnreadlevelnetdata函数(73页)function [ed,dd,sd,gd,pn,h0,k1,k2,h1,s]=readlevelnetdata global filename filepath;global ed dd sd pn gd h0 k1 k2 h1 s k11 k12;k1=[];k2=[];h=[];s=[];[filename,filepath]=uigetfile('*.txt','选择高程数据文件');fid1=fopen(strcat(filepath,filename),'rt');if(fid1==-1)msgbox('Input File or Path is not correct','Warning','warn');return;ended=fscanf(fid1,'%f',1);dd=fscanf(fid1,'%f',1);sd=ed+dd;gd=fscanf(fid1,'%f',1);pn=fscanf(fid1,'%f',sd);h0=fscanf(fid1,'%f',ed);h0(dd+1:ed+dd)=h0(1:ed);heightdiff=fscanf(fid1,'%f',[4,gd]);heightdiff=heightdiff';k1=heightdiff(:,1);%起点k2=heightdiff(:,2);%终点k11=heightdiff(:,1);%起点k12=heightdiff(:,2);%终点h1=heightdiff(:,3);%高差s=heightdiff(:,4);%距离fclose('all');%点号转换[k1,k01]=chkdat(sd,pn,k1);[k2,k02]=chkdat(sd,pn,k2);h0(1:dd)=20000;ie=0;while(1)%计算近似高程for k=1:gdi=k1(k);j=k2(k);if(h0(i)<1e4&h0(j)>1e4)h0(j)=h0(i)+h1(k);ie=ie+1;endif(h0(i)>1e4&h0(j)<1e4)h0(i)=h0(j)-h1(k);ie=ie+1;endendif(ie==dd)break;endendh0=reshape(h0,length(h0),1); returnbm1函数(75页)function id=bm1(gd,dd,k1,k2)%计算一维压缩存放的数组idid=[];for i=1:ddk=i;for j=1:gdi1=k1(j);i2=k2(j);if(i1==i&i2<k)k=i2;endif(i2==i&i1<k)k=i1;endendid(i)=k;endfor i=2:ddid(i)=id(i-1)+i-id(i)+1;endreturn一维压缩存储法方程平差(76页)global pathname filenameglobal ed dd sd pn gd h0 k1 k2 h1 s dh;p=1./s;id=bm1(gd,dd,k1,k2);mm=id(dd);a(1:mm)=0;b(1:dd)=0;for k=1:gd %形成法方程i=k1(k);j=k2(k);h1=h1(k)+h0(i)-h0(j);if(i<=dd)ii=id(i)-i;a(ii+i)=a(ii+i)+p(k);b(i)=b(i)-h1*p(k);endif(j<=dd)jj=id(j)-j;a(jj+j)=a(jj+j)+p(k);b(j)=b(j)+h1*p(k);if(i<=dd)if(i>=j)a(ii+j)=a(ii+j)-p(k);elsea(jj+i)=a(jj+i)-p(k);endendendenda=gs5(dd,a,id);%变带宽下三角紧缩存储高斯消元法dh=cy6(a,b,id,dd,1);%常数项约化与回代子程序dh(dd+1:ed+dd)=0;hm(dd+1:ed+dd)=0;for i=1:sdh(i)=h0(i)+dh(i);endvv=0;for i=1:gdL(i)=h(k2(i))-h(k1(i));v(i)=h(k2(i))-h(k1(i))-h1(i);vv=vv+v(i)*v(i)/s(i);endu=sqrt(vv/(gd-dd));for i=1:ddb(1:dd)=0;b(i)=1.0;b=cy6(a,b,id,dd,i);hm(i)=sqrt(b(i))*u;endwritelevelnetdata(pn,k1,k2,h1,v',L',h0,dh',h',hm',u);gs5函数(77页)function a=gs5(dd,a,id)%变带宽高斯消去法for i=1:ddii=id(i)-i;if(i-1==0)li=1-ii;elseli=id(ii-1)-ii+1;endfor j=li:ijj=id(j)-j;if(j-1)==0lj=1-jj;elselj=id(j-1)-jj+1;endlk=li;if(li<lj)lk=lj;endfor k=lk:j-1kk=id(k);a(ii+j)=a(ii+j)-a(ii+k)/a(kk)*a(jj+k);endendendreturncy6函数(78页)function b=cy6(a,b,id,dd,k1)%常数项约化与回代子程序for i=k1:ddii=id(i)-i;if(i==1)nd=id(i);elsend=id(i)-id(i-1);ende=0;for k=1:i-1if((i-k)<nd)e=e+a(ii+k)*b(k);endendb(i)=(b(i)-e)/(a(ii+i);endfor i=dd-1:-1:k1ii=id(i);for k=i+1:ddkk=id(k)-k;nk=id(k)-id(k-1);if(k-i<nk)b(i)=b(i)-a(kk+i)/a(ii)*b(k);endendendreturn上三角存储法方程平差程序(79页)mm=(dd+1)*dd/2;a(1:mm)=0;b(1:dd)=0;for k=1:gdi=k1(k);j=k2(k);h1=h1(k)+h0(i)-h0(j);if(i<=dd)ii=(i-1)*(dd-i/2);a(ii+i)=a(ii+i)+1/s(k);b(i)=b(i)+1./s(k)*h1;endif(j<=dd)jj=(j-1)*(dd-j/2);a(jj+j)=a(jj+j)+1/s(k);b(j)=b(j)-1./s(k)*h1;if(i<=dd)if(i<j)a(ii+j)=a(ii+j)-1/s(k);elsea(jj+i)=a(jj+i)-1/s(k);endendendenda=invsqr(a,dd);for i=1:dddh(i)=0;di=(i-1)*(dd-i/2);for j=1:dddj=(j-1)*(dd-j/2);if(j<i)dh(i)=dh(i)-a(dj+i)*b(j);elsedh(i)=dh(i)-a(di+j)*b(i);endendenddh(dd+1:ed+dd)=0;hm(dd+1:ed+dd)=0;for i=1:sdh(i)=h0(i)+dh(i);endvv=0;for i=1:gdL(i)=h(k2(i))-h(k1(i));v(i)=h(k2(i))-h(k1(i))-h1(i);vv=vv+v(i)*v(i)/s(i);enduw0=sqrt(vv/(gd-dd));for i=1:ddii=(i-1)*(dd-i/2);hm(i)=sqrt(a(ii+i))*uw0;endreturn输出数据函数(79页)function writelevelnetdata(pn,k1,k2,h1,v,L,h0,dh,h,hm,uw0)disp('待定点高程平差值及中误差:')disp('---点号----近似高程(m)-高程改正(m)-高程平差值(m)-中误差')[pn,h0,dh,h,hm]disp('高差观测值平差值:')disp('---点号------点号----观测高差(m)---高差改正(m)-平差高差(m)')[pn(k1),pn(k2),h1,v,L][filename1,pathname1]=uigetfile('*.txt','请选择输出文件');fid2=fopen(strcat(pathname1,filename1),'wt');if(fid2==-1)msgbox('Error by Opening Output File','Warning','warn');return;endfprintf(fid2,'待定点高程平差值及中误差:\n 点号--近似高程(m)--高程改正(m)-高程平差值(m)-中误差\n');fprintf(fid2,'%5d %10.4f %10.4f %10.4f %10.4f\n',[pn,h0,dh,h,hm]');fprintf(fid2,'高差观测值平差值:\n -点号---点号--观测高差(m)--高差改正(m)-平差高差(m)\n'); fprintf(fid2,'%5d %5d %10.4f %10.4f %10.4f\n',[pn(k1),pn(k2),h1,v,L]');fprintf(fid2,'单位权中误差:%10.4fm\n',uw0);% open(strcat(pathname1,filename1));fclose(fid2);return利用Matlab矩阵运算的平差程序(81页)function level3ticdisp('平差已经开始---->>>>')global ed dd sd pn gd h0 k1 k2 h1 s dh;[ed,dd,sd,gd,pn,h0,k1,k2,h1,s]=readlevelnetdata;[dh,h,V,L,uw0,uwh,uwl]=calculatelevelnet(ed,dd,sd,gd,pn,h0,k1,k2,h1,s);writelevelnetdata(pn,k1,k2,h1,V,L,h0,dh,h,uwh,uw0); %输出水准网解算结果yunxing=toc;disp(['平差过程的运行时间为',num2str(yunxing),'秒。
柃路园柃路园9860计算器与道路之星销售靠的是诚信与服务来经营店铺,店铺诚信服务、服务第一。
在本店铺购买后包教会道路之星安装与使用,并解决购买者任何测量问题,同时赠送各种常用软件及测量文件案例,并对新手及老手测量人员提供测量服务。
柃路园—(服务淘宝第一、价格淘宝最低)购买者请看准测量服务:网店网址:按住Ctrl并点击鼠标“柃路园—(淘宝网址)”以跟踪连接教程网址:按住Ctrl并点击鼠标“(道路之星软件视频讲解_道路之星软件使用教程 - )”以跟踪连接QQ测量服务群:128528455 电话138****4860基于Casio计算器的中文测量计算系统道路之星V1.22操作手册目录第一章概述- 1 - 第二章系统安装- 3 - 第一节电脑端程序- 3 - 第二节计算器与电脑交换数据- 5 - 第三节计算器程序- 7 - 第四节计算器程序基本操作- 11 - 第五节简易操作指南- 14 - 第三章常规计算- 16 - 第四章水准网记录及平差- 20 - 第五章控制测量记录与平差- 26 - 第六章道路测设- 30 - 第一节项目管理- 30 - 第二节道路正反算- 36 - 第三节路基路面控制- 44 - 第四节边坡计算- 49 - 第五节结构物及桥梁计算及检测- 53 - 第六节隧道超欠挖计算- 60 - 第七章计算器数据输入- 68 -道路之星用户手册第一章概述第一章概述一、功能和特点道路之星适用于公路、铁路、城市道路主线、立交匝道、隧道的勘测设计与施工放样工作。
软件分为两个部分:a.电脑端数据处理负责设计输入输出、设计成果的复核、现场采集数据的分析计算以及与计算器进行文件传输;b.计算器端施工现场计算基于Casio fx9750、fx9860、fxCG20计算器设计,负责现场的施工指导和相关数据的采集。
(一)、道路全线测设系统:将道路全线或一个标段所有数据一次性输入,主线、匝道可以存入一个文件,用路线名进行标识,一个项目文件可以包含任意多条路线。
![[整理]10控制网平差计算](https://uimg.taocdn.com/e0263d420066f5335b812169.webp)
§9.1 条件平差原理在条件观测平差中,以n 个观测值的平差值1ˆ⨯n L作为未知数,列出v 个未知数的条件式,在min =PV V T 情况下,用条件极值的方法求出一组v 值,进而求出平差值。
9.1.1基础方程和它的解设某平差问题,有n 个带有相互独立的正态随机误差的观测值 ,其相应的权阵为 , 它是对角阵,改正数为 ,平差值为 。
当有r 个多余观测时,则平差值 应满足r 个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=++++=++++=++++0ˆˆˆ0ˆˆˆ0ˆˆˆ221122112211οοοr L r L r L r b L b L b L b a L a L a L a n n n n n n (9-1) 式中i a 、i b 、…i r (i =1、2、…n )——为条件方程的系数;0a 、0b 、…0r ——为条件方程的常项数以ii i v L L +=ˆ(i =1、2、…n )代入(9-1)得条件方程(9-2)式中a w 、b w 、……r w 为条件方程的闭合差,或称为条件方程的不符值,即(9-3) 令⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n n n r r r r b b b a a a A212121⎪⎪⎭⎪⎪⎬⎫++⋅⋅⋅++=++⋅⋅⋅++=++++=022110221102211r L r L r L r w b L b L b L b w a L a L a L a w n n n n n b n n a ⎪⎪⎭⎪⎪⎬⎫=++⋅⋅⋅++=++⋅⋅⋅++=++⋅⋅⋅++000221122112211r n n b n n a n n w v r v r v r w v b v b v b w v a v a v a ⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L 211⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L ˆˆˆˆ211⎪⎪⎪⎪⎫ ⎛=⨯b a r w w W 1⎪⎪⎪⎪⎫ ⎛=⨯n v v V 211⎪⎪⎪⎫⎛=⨯οοb a A o r 11⨯n L nn P ⨯1⨯n V 1ˆ⨯n L 1ˆ⨯n L⎪⎪⎪⎫⎛=⨯n n p p P 000021则(9-1)及(9-2)上两式的矩阵表达式为0ˆ0=+A LA (9-4) 0=+W AV (9-5)上改正数条件方程式中V 的解不是唯一的解,根据最小二乘原理,在V 的无穷多组解中,取PV V T = 最小的一组解是唯一的,V 的这一组解,可用拉格朗日乘数法解出。
柃路园柃路园9860计算器与道路之星销售靠的是诚信与服务来经营店铺,店铺诚信服务、服务第一。
在本店铺购买后包教会道路之星安装与使用,并解决购买者任何测量问题,同时赠送各种常用软件及测量文件案例,并对新手及老手测量人员提供测量服务。
柃路园—(服务淘宝第一、价格淘宝最低)购买者请看准测量服务:网店网址:按住Ctrl并点击鼠标“柃路园—(淘宝网址)”以跟踪连接教程网址:按住Ctrl并点击鼠标“(道路之星软件视频讲解_道路之星软件使用教程 - )”以跟踪连接QQ测量服务群:128528455 电话138****4860基于Casio计算器的中文测量计算系统道路之星V1.22操作手册目录第一章概述- 1 - 第二章系统安装- 3 - 第一节电脑端程序- 3 - 第二节计算器与电脑交换数据- 5 - 第三节计算器程序- 7 - 第四节计算器程序基本操作- 11 - 第五节简易操作指南- 14 - 第三章常规计算- 16 - 第四章水准网记录及平差- 20 - 第五章控制测量记录与平差- 26 - 第六章道路测设- 30 - 第一节项目管理- 30 - 第二节道路正反算- 36 - 第三节路基路面控制- 44 - 第四节边坡计算- 49 - 第五节结构物及桥梁计算及检测- 53 - 第六节隧道超欠挖计算- 60 - 第七章计算器数据输入- 68 -道路之星用户手册第一章概述第一章概述一、功能和特点道路之星适用于公路、铁路、城市道路主线、立交匝道、隧道的勘测设计与施工放样工作。
软件分为两个部分:a.电脑端数据处理负责设计输入输出、设计成果的复核、现场采集数据的分析计算以及与计算器进行文件传输;b.计算器端施工现场计算基于Casio fx9750、fx9860、fxCG20计算器设计,负责现场的施工指导和相关数据的采集。
(一)、道路全线测设系统:将道路全线或一个标段所有数据一次性输入,主线、匝道可以存入一个文件,用路线名进行标识,一个项目文件可以包含任意多条路线。
工程测量与测绘技术操作手册第1章工程测量基础 (4)1.1 测量基本概念 (4)1.1.1 测量 (4)1.1.2 基准 (4)1.1.3 尺度 (4)1.1.4 比例尺 (4)1.2 测量坐标系与基准面 (4)1.2.1 测量坐标系 (5)1.2.2 基准面 (5)1.3 测量误差与精度分析 (5)1.3.1 测量误差的分类 (5)1.3.2 测量误差的传播与合成 (5)1.3.3 测量精度的评定 (5)1.3.4 测量误差的控制 (5)第2章测绘仪器及其使用方法 (5)2.1 水平仪 (5)2.1.1 使用方法 (5)2.2 经纬仪 (6)2.2.1 使用方法 (6)2.3 全站仪 (6)2.3.1 使用方法 (6)2.4 激光扫描仪 (6)2.4.1 使用方法 (6)第3章水平控制测量 (6)3.1 水平控制网设计 (7)3.1.1 控制网设计原则 (7)3.1.2 控制网类型选择 (7)3.1.3 控制点等级划分 (7)3.1.4 控制网精度估算 (7)3.2 水平控制点布设与测量 (7)3.2.1 控制点布设原则 (7)3.2.2 控制点选点与标石埋设 (7)3.2.3 水平控制测量方法 (7)3.2.4 水平控制测量操作步骤 (8)3.3 水平控制测量数据处理 (8)3.3.1 数据预处理 (8)3.3.2 观测值平差 (8)3.3.3 控制点坐标计算 (8)3.3.4 控制网精度评定 (8)3.3.5 成果整理与提交 (8)第4章垂直控制测量 (8)4.1.1 设计原则 (8)4.1.2 控制网等级与类型 (8)4.1.3 控制点分布 (8)4.1.4 控制网优化 (9)4.2 垂直控制点布设与测量 (9)4.2.1 控制点选点 (9)4.2.2 控制点标志 (9)4.2.3 观测设备 (9)4.2.4 观测方法 (9)4.2.5 观测精度 (9)4.3 垂直控制测量数据处理 (9)4.3.1 数据预处理 (9)4.3.2 外业数据检验 (9)4.3.3 数据平差 (9)4.3.4 精度分析 (10)4.3.5 成果整理与提交 (10)第5章地形图测绘 (10)5.1 地形图基本知识 (10)5.1.1 地形图概念 (10)5.1.2 地形图分类 (10)5.1.3 地形图比例尺 (10)5.1.4 地形图符号 (10)5.2 地形图测绘方法 (10)5.2.1 地面测量 (11)5.2.2 航空摄影测量 (11)5.3 地形图质量控制与检查 (11)5.3.1 资料检查 (11)5.3.2 测量数据检查 (11)5.3.3 地形图内容检查 (11)5.3.4 地形图精度检查 (11)5.3.5 审核与验收 (12)第6章工程测量 (12)6.1 施工放样 (12)6.1.1 概述 (12)6.1.2 放样方法 (12)6.1.3 放样步骤 (12)6.1.4 放样质量控制 (12)6.2 线路测量 (12)6.2.1 概述 (12)6.2.2 中线测量 (12)6.2.3 横断面测量 (13)6.2.4 纵断面测量 (13)6.3 建筑物测量 (13)6.3.2 平面控制测量 (13)6.3.3 高程控制测量 (13)6.3.4 细部测量 (13)6.3.5 建筑物变形观测 (14)第7章水下测量 (14)7.1 水下测量概述 (14)7.2 单波束测深仪 (14)7.3 多波束测深系统 (14)第8章遥感与卫星测绘技术 (15)8.1 遥感基本原理 (15)8.1.1 遥感概念 (15)8.1.2 电磁波谱 (15)8.1.3 遥感传感器 (15)8.1.4 遥感平台 (15)8.2 卫星测绘技术 (15)8.2.1 卫星测绘概述 (16)8.2.2 卫星轨道与传感器 (16)8.2.3 卫星测绘系统 (16)8.3 遥感与卫星测绘数据处理 (16)8.3.1 数据预处理 (16)8.3.2 数据融合 (16)8.3.3 目标提取与分类 (16)8.3.4 变化检测 (16)8.3.5 应用实例 (16)第9章摄影测量与激光扫描 (16)9.1 摄影测量基本原理 (17)9.1.1 摄影测量概述 (17)9.1.2 摄影测量基本公式 (17)9.1.3 摄影测量设备 (17)9.1.4 摄影测量方法 (17)9.2 激光扫描技术 (17)9.2.1 激光扫描概述 (17)9.2.2 激光扫描原理 (17)9.2.3 激光扫描设备 (17)9.2.4 激光扫描方法 (17)9.3 摄影测量与激光扫描数据处理 (17)9.3.1 数据预处理 (17)9.3.2 特征提取 (18)9.3.3 数据配准与拼接 (18)9.3.4 三维模型重建 (18)9.3.5 精度分析 (18)第10章测绘成果应用与质量控制 (18)10.1 测绘成果的应用 (18)10.1.1 测绘成果在工程项目中的应用 (18)10.1.2 测绘成果在公共事务中的应用 (18)10.2 测绘成果的质量控制 (18)10.2.1 质量控制原则 (19)10.2.2 质量控制方法 (19)10.2.3 质量控制措施 (19)10.3 测绘成果交付与验收标准 (19)10.3.1 成果交付要求 (19)10.3.2 成果验收标准 (19)10.3.3 成果验收程序 (20)第1章工程测量基础1.1 测量基本概念工程测量是应用测量学原理和方法,对工程对象的几何位置、形状、大小及物理量进行测定的一门科学技术。
威远图公司简介北京威远图仪器有限责任公司(简称WELTOP),是一家致力于空间数据的获取与应用开发、空间信息系统集成、空间信息服务的高新技术企业,创建于1997年1月。
公司自成立以来,一直本着“真诚、服务、创新、发展”的企业精神,“以卓越的方式完成每一件事”的原则,集测绘设备销售、软件开发、信息系统集成、空间信息生产与服务为一体,短短几年时间里,已发展成为一家集空间地理信息和应用专业软件的研制和开发、空间地理信息增值服务、大型GIS工程承接为一体的全国性知名品牌企业,业务范围涵盖了整个测绘行业及服务于公众地理信息的所有工作范畴。
2000年1月又分离出北京威远图数据开发有限公司,侧重于软件和系统工程的开发和研究。
现在公司的产品与服务涉及领域包括国土、交通、水利、海洋、石化、电力、市政、农业、金融、商业、咨询等行业,在测绘行业中赢得了引人瞩目的一席之地。
公司的主要业务范围包括:测绘/地理信息采集设备、计算机与专业应用软件系统的开发/销售、以及相关的技术咨询和服务。
目前主要产品分为软、硬件两大类,有公司自己开发研制的Cito和SV系列测绘成图软件、TOP 系列测绘软件(平差及通讯等)、水利断面软件、道路测设一体化系统软件、地下管线测绘及管理软件、建筑物沉降分析软件、掌上测图系统、数字水准软件、数字矿山测绘系统以及房产测量师软件;另外我公司还承接GIS工程,已经推出并得到成熟应用的GIS系统有:房产测绘信息管理系统、矿产资源管理信息系统、银行营业网点管理系统、通用测绘信息化管理系统、地下管网信息管理系统等;配套的硬件产品有全站仪、GPS、绘图仪、扫描仪等。
2002年,威远图公司入住中关村德胜科技园区,同时获得北京市西城区政府下属隆达集团风险注资,被北京市认证为高新技术企业以及软件企业、获得北京市规划委员会颁发的测绘软件及地理信息系统开发的乙级资质,同年与美国知名企业Autodesk公司携手,作为Autodesk GIS产品中国测绘行业总代理,成为测绘行业唯一的一家ADN全球开发联盟成员。
控制点坐标平差处理城市平面控制网的种类较多,有GPS网、三角网、边角组合网和导线网,其中导线网按等级划分为三、四等和一、二、三级。
本文以附合导线的内业数据处理为例,说明控制点坐标平差处理的方法。
导线的内业计算,就是根据起始点的坐标和起始边的坐标方位角,以及所观测的导线边长和转折角,计算各导线点的坐标。
计算的目的除了求得各导线点的坐标外,还有就是检核导线外业测量成果的精度。
在转入内业计算之前,应整理并全面检查外业测量的基础资料,检查数据是否完整,是否有记录错误和计算错误,是否满足精度要求,起算数据是否正确和完整,然后绘制相应导线的平面草图,并将相关数据标示于草图的对应部位。
如图2-21所示的附合导线,观测转折角为左角,计算的步骤如下:(1)填表。
计算之前,首先将示意图中各观测数据(观测角和边长)和已知数据(起始边和附合边的坐标方位角,起始点和终止点的坐标)填入相应表格之中,如表2-19所示。
(2)角度闭合差的计算与调整。
如图2-20所示的附合导线,观测转折角为左角,根据坐标方位角的推算公式可以依次计算各边的坐标方位角:αA1=αBA+180°+βAα12=αA1+180°+β1α2C=α12+180°+β2+)αCD′=α2C+180°+βCαCD ′=αBA+4×180°+∑β测左计算终边坐标方位角的一般公式为:α终边′=α始边+n·180°+∑β测左(2-5)式中n为导线观测角个数。
角度闭合差的计算公式为:fβ测=α终边′-α终边(2-6)图2-21 附合导线计算示意图角度闭合差fβ的大小,表明测角精度的高低。
对于不同等级的导线,有不同的限差(即fβ容)要求,例如图根导线角度闭合差的允许值为:fβ容=±60″n(2-7)式中n为多边形内角的个数。
这一步计算见辅助计算栏,fβ测=+41″, fβ容=±120″。
第4章平差数学模型与最小二乘原理测量———确定模型确定模型的必要元素(量、数据),其个数为t m个。
•必要元素的个数T只取决于模型本身•所有的必要元素都是彼此函数独立的量•模型中所有的量都是必要元素的函数•一个模型中函数独立的量最多只有T个•模型中作为必要元素的“量”不是唯一的必要元素分必要观测量(t 个)和必要起算数据(t o 个)。
一个测量问题中的总观测个数(n 个),则多余观测个数(r 个)相应的有总起算数据个数和多余起算数据个数。
必要观测数据个数:m o t t t =--多余起算数据个数控制网必要元素个数必要起算数据个数与类型水准网点数t=1一个点的高程测角三角网点数×2t=4一个点的坐标、一边边长和方位角⇦⇨两个已知点测边三角网点数×2t=3一个点的坐标、一边方位角边角三角网点数×2t=3一个点的坐标、一边方位角r=n-t当n<t时,不能确定平差问题的模型n =t时,能确定模型,但无检核、有无粗差不知n>t时,有多余观测,因观测误差使观测值间产生矛盾,使模型出现多解。
n>t时,通过平差处理,让观测值的平差值之间满足相应的条件关系,消除矛盾,获取模型的唯一最优解。
4-2函数模型由于只能求出真误差的估值,即真值的估值,函数模型应为:ˆ0AL A +=平差值条件:0()AV W W AL A +==+改正数条件选择t 个函数独立的参数:,这些参数刚好能够确定模型。
则函数模型为:12(,,,)t X X X1()n L F X ⨯=线性情况下111n n t t n L B X d⨯⨯⨯⨯=+ 误差方程:111111()n t t n n n n n V B X l l d L ⨯⨯⨯⨯⨯⨯⨯=+=- o o1111()n t n t n n V B x ll BX d L L L ⨯⨯⨯⨯⨯=+=+-=-附有参数的条件平差法模型在具体平差问题中,观测次数n ,必要观测次数t ,则多余观测次数r ,再增加u 个独立参数,且0 <u <t ,则总共有r +u = c 个条件方程,一般形式是:线性情况下01111c n n c u u c c A L B X A ⨯⨯⨯⨯⨯⨯++=改正数条件方程:01111()c n c u n u c c A V B x W W AL BX A ⨯⨯⨯⨯⨯⨯++==++1(,)0c F L X ⨯=具有约束条件的间接平差法的函数模型选择u 个参数:,u>t ,且包含t 个函数独立的参数。