动力臂L1_<___ 阻力臂L2
动力臂L1__=__ 阻力臂L2
新 知
力的
动力F1_<_____ 动力F1__>____阻 动力F1_=_____阻
梳 关系
理
阻力F2
力F2
力F2
既不省力也不
特点 省力但费距离 费力但省距离 费力,既不省距
离也不费距离
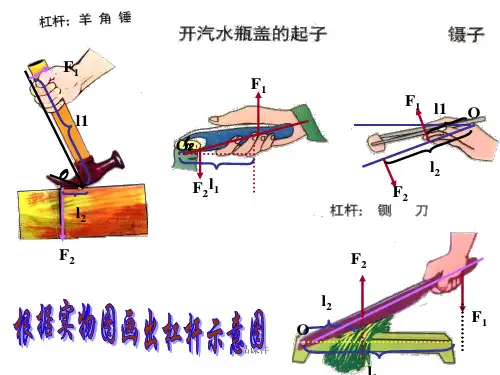
撬棒、开酒瓶 缝纫机脚踏板、
应用
托盘天平
的起子
筷子
馈 A
是 支点 ,F1是 动力 ,F2是 阻力 ,L1是 动力臂,L2
是 阻力臂。
图5-1
课 4. 如图5-2所示,一名同学在做俯卧撑,如果把人的躯干看
堂
反 成一个杠杆,该杠杆的支点是 B (填图中字母)点,动力
馈 A
是 地面对手掌的支持力 (选填“手掌对地面的压力”或“地
面对手掌的支持力”),阻力是 人自身的重力 。
水平位置平衡的主要目的是 消除杠杆自重对实验的影响 。
应 用
(2)如图所示,在杠杆左侧
示 A处挂4个相同的钩码,要使杠杆
例
在水平位置平衡,应在杠杆右侧
B处挂 3 个相同的钩码。
图6-5-4
(3)如图乙所示,用弹簧测力计在C处竖直向上拉,当弹簧测力
计逐渐向右倾斜时,使杠杆仍然在水平位置平衡,则弹簧测
力杠杆的是___A____,属于
等臂杠杆的是__C_____。
(均填字母)
图5-6
课 5.如图5-7所示,轻质杠杆OA可绕O点转动,杠杆长0.4 m,在它
堂 反
的中点B处挂一重30 N的物体G。若在杠杆上A端施加竖直
馈 方向的力F,使杠杆在水平位置平衡,求F的大小。