结构动力学复习题
- 格式:pdf
- 大小:588.17 KB
- 文档页数:4
结构动力学课后习题答案结构动力学是研究结构在动态载荷作用下的响应和行为的学科。
它涉及到结构的振动、冲击响应、疲劳分析等方面。
课后习题是帮助学生巩固课堂知识、深化理解的重要手段。
以下内容是结构动力学课后习题的一些可能答案,供参考:习题1:单自由度系统自由振动分析解答:对于一个单自由度系统,其自由振动的频率可以通过以下公式计算:\[ f = \frac{1}{2\pi}\sqrt{\frac{k}{m}} \]其中,\( k \) 是系统的刚度,\( m \) 是系统的总质量。
系统自由振动的振幅随着时间的衰减可以通过阻尼比 \( \zeta \) 来描述,其衰减系数 \( \delta \) 可以通过以下公式计算:\[ \delta = \sqrt{1-\zeta^2} \]习题2:单自由度系统受迫振动分析解答:当单自由度系统受到周期性外力作用时,其受迫振动的振幅可以通过以下公式计算:\[ A = \frac{F_0}{\sqrt{(k-m\omega^2)^2+(m\zeta\omega)^2}} \] 其中,\( F_0 \) 是外力的幅值,\( \omega \) 是外力的角频率。
习题3:多自由度系统模态分析解答:对于多自由度系统,可以通过求解特征值问题来得到系统的模态。
特征值问题通常表示为:\[ [K]{\phi} = \lambda[M]{\phi} \]其中,\( [K] \) 是系统的刚度矩阵,\( [M] \) 是系统的质量矩阵,\( \lambda \) 是特征值,\( {\phi} \) 是对应的特征向量,即模态形状。
习题4:结构的冲击响应分析解答:对于结构的冲击响应分析,通常需要考虑冲击载荷的持续时间和冲击能量。
结构的冲击响应可以通过冲击响应谱(IRF)来分析,它描述了结构在不同频率下的响应。
冲击响应分析的结果可以用来评估结构的耐冲击性能。
习题5:疲劳分析解答:结构的疲劳分析需要考虑结构在重复载荷作用下的寿命。
工程力学结构动力学复习题一、简答题1、结构的动力特性主要指什么?对结构做动力分析可分为哪几个阶段?2、何谓结构的振动自由度?它与机动分析中的自由度有何异同?3、何谓动力系数?简谐荷载下动力系数与哪些因素有关?4、动力荷载与静力荷载有什么区别?动力计算与静力计算的主要差别是什么?5、为什么说结构的自振频率和周期是结构的固有性质?怎样改变他们?6、简述振型分解法是如何将耦联的运动方程解耦的.7、时域法求解与频域法求解振动问题各有何特点?8、什么叫动力系数,动力系数大小与哪些因素有关?单自由度体系位移动力系数与内力动力系数是否一样?答:动力放大系数是指动荷载引起的响应幅值与动荷载幅值作为静荷载所引起的结构静响应之比值。
简谐荷载下的动力放大系数与频率比、阻尼比有关。
当惯性力与动荷载作用线重合时,位移动力系数与内力动力系数相等;否则不相等.原因是:当把动荷载换成作用于质量的等效荷载时,引起的质量位移相等,但内力并不等效,根据动力系数的概念可知不会相等。
9、振型正交性的物理意义是什么?振型正交性有何应用?答:由振型关于质量、刚度正交性公式可知,i 振型上的惯性力在j 振型上作的虚功为0。
由此可知,既然每一主振型相应的惯性力在其他主振型上不做功,那么它的振动能量就不会转移到别的主振型上去。
换句话说,当一个体系只按某一主振型振动时,不会激起其他主振型的振动.这说明各个主振型都能单独出现,彼此线性无关。
这就是振型正交的物理意义. 一是可用于校核振型的正确性;二是在已知振型的条件下,可以通过折算质量与折算刚度计算对应的频率。
而更主要的是任一同阶向量均可用振型的线性组合来表示,在受迫振动分析中,利用振型的正交性,在阻尼矩阵正交的假设下可使运动方程解藕。
10、什么是阻尼、阻尼力,产生阻尼的原因一般有哪些?什么是等效粘滞阻尼?答:振动过程的能量耗散称为阻尼。
产生阻尼的原因主要有:材料的内摩擦、构件间接触面的摩擦、介质的阻力等等。
结构力学下复习题一. 判断题1. 对于单自由度体系有如下关系k =δ-1对于多自由度体系也同样成立。
( )2. 仅在恢复力作用下的振动称为自由振动。
( )3. 如果使单自由度体系的阻尼增大,其结果是周期变短。
( )4、 体系在θϖ>时,)(t y 与)(t p 方向相同。
ϖ为自振频率,EI 为常数。
( )5. 在无限自由度体系的弹性稳定分析中,用静力法和能量法(瑞利-里兹法)得到的临界荷载是相同的。
( )6. 只要两个杆件的截面面积相同、所用材料相同,它们的极限弯矩就是相同的。
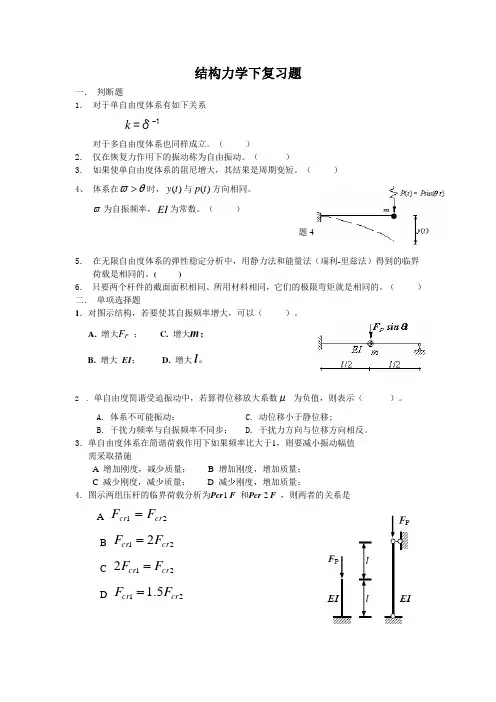
( )二. 单项选择题1.对图示结构,若要使其自振频率增大,可以( )。
A. 增大F P ; C. 增大m ;B. 增大 EI ; D. 增大l 。
2 . 单自由度简谐受迫振动中,若算得位移放大系数μ 为负值,则表示( )。
A. 体系不可能振动; C. 动位移小于静位移;B. 干扰力频率与自振频率不同步; D. 干扰力方向与位移方向相反。
3.单自由度体系在简谐荷载作用下如果频率比大于1,则要减小振动幅值需采取措施A 增加刚度,减少质量;B 增加刚度,增加质量;C 减少刚度,减少质量;D 减少刚度,增加质量;4.图示两组压杆的临界荷载分析为Pcr 1 F 和Pcr 2 F ,则两者的关系是A 21cr cr F F =B 212cr cr F F =C 212cr cr F F =D 215.1cr cr F F =题4三 . 填充题1.图示体系不计杆件质量和轴向变形,各杆抗弯刚度为常数,其动力自由度为 。
2.图示体系的自振频率为 。
3、对于矩形截面,极限弯矩为屈服弯矩的 倍。
4、已知质点m 的最大竖向位移st y y 5max = ,且初始时质点竖向位移为st y (st y 为静位移),则质点的初始速度为 。
四. 计算分析题1.)已知θ = 0.4ω ,试求图示体系的振幅和最大动弯矩。
2.试求图示体系质点的振幅和A 截面动弯矩幅值,已知ϖθ6.0=3.试求图示基础的振幅 A及地基所受的动压力N。
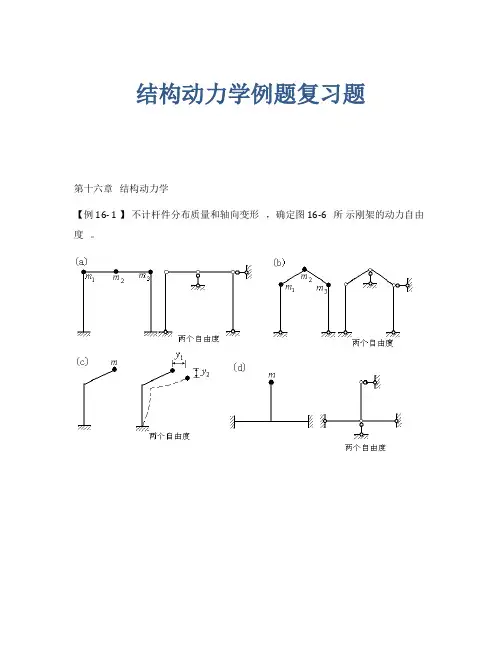
结构动力学例题复习题第十六章结构动力学【例 16- 1 】不计杆件分布质量和轴向变形,确定图 16-6 所示刚架的动力自由度。
图 16-6【解】各刚架的自由度确定如图中所示。
这里要注意以下两点:1.在确定刚架的自由度时,引用受弯直杆上任意两点之间的距离保持不变的假定。
根据这个假定并加入最少数量的链杆以限制刚架上所有质量的位置,则刚架的自由度数目即等于所加链杆数目。
2.集中质量的质点数并不一定等于体系的自由度数,而根据自由度的定义及问题的具体情形确定。
【例 16- 2 】试用柔度法建立图 16-7a 所示单自由度体系,受均布动荷载作用的运动方程。
【解】本题特点是,动荷载不是作用在质量上的集中荷载。
对于非质量处的集中动荷载的情况,在建立运动方程时,一般采用柔度法较为方便。
设图 a 质量任一时刻沿自由度方向的位移为 y (向下为正)。
把惯性力、阻尼力及动荷载,均看作是一个静荷载,则在其作用下体系在质量处的位移y ,由叠加原理(见图 b 、 c 、 d 及 e ),则式中,,。
将它们代入上式,并注意到,,得图 16-7经整理后可得式中,,称为等效动荷载或等效干扰力。
其含义为:直接作用于质量上所产生的位移和实际动荷载引起的位移相等。
图 a 的相当体系如图 f 所示。
【例 16- 3 】图 16-8 a 为刚性外伸梁, C 处为弹性支座 , 其刚度系数为,梁端点 A 、 D 处分别有和质量,端点 D 处装有阻尼器 c ,同时梁 BD 段受有均布动荷载作用,试建立刚性梁的运动方程。
【解】因为梁是刚性的,这个体系仅有一个自由度,故它的动力响应可由一个运动方程来表达,方程可以用直接平衡法来建立。
这个单自由度体系可能产生的位移形式如图 b 所示,可以用铰 B 的运动作为基本量,而其它一切位移均可利用它来表示。
图 16-8以顺时针向为正。
则 A 点有位移和加速度; D 点有位移和加速度及速度; C 点约束反力为。
由,有将惯性力、阻尼力及约束反力代入上式,得经整理,运动方程为小结:例 16- 2 及例 16- 3 讨论的是单自由度的一般情况下的运动方程的建立。
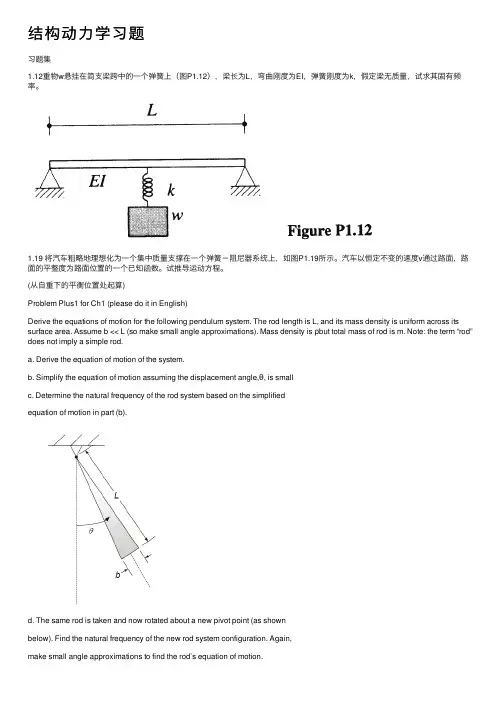
结构动⼒学习题习题集1.12重物w悬挂在简⽀梁跨中的⼀个弹簧上(图P1.12),梁长为L,弯曲刚度为EI,弹簧刚度为k,假定梁⽆质量,试求其固有频率。
1.19 将汽车粗略地理想化为⼀个集中质量⽀撑在⼀个弹簧-阻尼器系统上,如图P1.19所⽰。
汽车以恒定不变的速度v通过路⾯,路⾯的平整度为路⾯位置的⼀个已知函数。
试推导运动⽅程。
(从⾃重下的平衡位置处起算)Problem Plus1 for Ch1 (please do it in English)Derive the equations of motion for the following pendulum system. The rod length is L, and its mass density is uniform across its surface area. Assume b << L (so make small angle approximations). Mass density is ρbut total mass of rod is m. Note: the term “rod”does not imply a simple rod.a. Derive the equation of motion of the system.b. Simplify the equation of motion assuming the displacement angle,θ, is smallc. Determine the natural frequency of the rod system based on the simplifiedequation of motion in part (b).d. The same rod is taken and now rotated about a new pivot point (as shownbelow). Find the natural frequency of the new rod system configuration. Again,make small angle approximations to find the rod’s equation of motion.e. Compare the natural frequency from part (c) and (d). The new pivot point istermed the CENTER of PERCUSSIONProblem Plus2 for Ch1 (please do it in English)Determine the equation of motion of the following system using the Principle of Virtual Work.where()4x c x a=Hint: Be careful with respect to the beam with a distributed mass shown on the left. You caneither consider the rotational inertia about the hinge on the left –OR- you can consider therotational inertia about the beam’s center of mass point. If you go with considering the rotation about the beam’s center of mass, you need to account for the inertia associated with translational movement of that center of mass. In fact, a third valid approach is to not even consider the beam as a rotational element. You could discretize the beam to infinitely small slices with thickness “dx” and find the vertical translational inertia (essentially sum them using integrals). You should convince yourself of the equivalency of both approaches of analysis of the inertial properties of the system shown.2.6 ⼀个仪器的包装可如图P2.6所⽰模拟。

第十二章 矩阵位移法【例12-1】 图 a 所示 连 续 梁 ,EI=常数,只 考 虑 杆 件 的 弯 曲 变 形 。
分别用位移法和矩阵位移法计算。
图12-1解:(1)位移法解∙基本未知量和基本结构的确定 用位移法解的基本结构如图c 所示。
这里我们将结点1处的转角也作为基本未知数,这样本题仅一种基本单元,即两端固定梁。
∙位移法基本方程的建立⎪⎭⎪⎬⎫=+θ+θ+θ=+θ+θ+θ=+θ+θ+θ000333323213123232221211313212111P P P R K K K R K K K R K K K 将上式写成矩阵形式⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡000321321333231232221131211P P P R R R K K K K K K K K K∙系数项和自由项 计算(须绘出单位弯矩图和荷载弯矩图)由图d ,结点力矩平衡条件∑=0M ,得 l EI K 411=,l EI K 221=,031=K由图e ,结点力矩平衡条件∑=0M ,得l EI K 212=,l EI l EI l EI K 84422=+=,EI K 232=由图f ,结点力矩平衡条件∑=0M ,得 013=K ,l EI K 223=,EI l EI EI K 84433=+=由图g ,结点力矩平衡条件∑=0M ,得1Pl R p -=,2Pl R P -=,03=P R将系数项和自由项代入位移法基本方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧--+⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡0000118820282024321Pl l EI ∙解方程,得⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧-=⎪⎭⎪⎬⎫⎪⎩⎪⎨⎧θθθ14114162321EI Pl ∙由叠加法绘弯矩图,如图h 所示。
(2)矩阵位移法解∙对单元和结点编号(图a ) 本题只考虑弯曲变形的影响,故连续梁每个结点只有一个角位移未知数。
结构动力学复习题1、对单自由度体系的自由振动,加速度始终与位移方向相反。
2、下图所示为对称的四自由度体系,则正对称振型和反对称振型个数分布为2,23.结构体系的动力特性主要指频率、振型及阻尼4.图示体系(EI= 常数)的自振频率 为:(5={1 0.5}TΦ2={0.5 −1}TΦ6、如图所示振动体系不计杆件的轴向变形,则动力自由度数目是2。
7、单自由度体系只有当阻尼比1时才会产生振动现象。
8、已知结构的自振周期T=0.3s,阻尼比ζ=0.04,质量m在的初始条件下开始振动,则至少经过14个周期后振幅可以衰减到0.1mm以下。
9、多自由度框架结构顶部刚度和质量突然变小时,自由振动中顶部位移很大的现象称为鞭梢效应。
10.结构体系简化的自由度数目与计算结果的精度有关。
11.单自由度体系发生无阻尼自由振动时,若初始速度为零时,体系的振幅和初始位移大小相等。
12、如图2层框架结构,梁与楼板平面内的质量各为120吨,梁的刚度为无穷大,各柱的抗弯刚度EI 均为4×104 kNm 2,在2层楼面处有动荷载F P sin θt ,F P =5 Kn ,θ=2.5 rad/s ,不计阻尼,求最大动力位移和最大动力弯矩图。
⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⋅⎥⎦⎤⎢⎣⎡-⨯⨯-⨯--⨯50105.1105.1105.110321244424A A m m θθ13、地震反应谱是在阻尼比为0.05条件下地震影响系数与体系自振周期T 的关系曲线。
假设在上题2层楼体系条件下第1振型和第2振型振动的阻尼比均为0.05,在特定激励下测得体系按第1振型振动时的1,2层楼的层间相对侧移为0.06m 。
试按反应谱理论计算该体系第1振型振动时的顶层相对地面的位移。
解:1)求自振频率⎪⎪⎭⎫ ⎝⎛=⎪⎪⎭⎫ ⎝⎛⋅⎥⎦⎤⎢⎣⎡-⨯⨯-⨯--⨯00105.1105.1105.110321244424A A m m ωω s rad /91.61=ω ,s rad /09.182=ω2)求振型:()⎪⎪⎭⎫ ⎝⎛=618.111A ,()⎪⎪⎭⎫ ⎝⎛-=618.012A 3)顶层的侧移刚度为m kN /105.14⨯,故顶层受到的激励作用力大小为 kN 90006.0105.14=⨯⨯根据反应谱理论:1,2层的作用力为900618.1120111211221=⋅⨯=⋅⋅⋅=γααγA w FkN A w F 24.556618.19001120111111112==⋅⨯⨯=⋅⋅⋅=γααγ9004)顶层相对地面的位移为:m d 157.006.0105.124.5569004=+⎪⎭⎫ ⎝⎛⨯+=14、图3为三种不同支承情况的单跨梁,EI=常数,在梁中点有一集中质量m,不计梁的质量,试比较三者的自振频率。
第二章自由振动分析2-1(a )由例2 2W Tgk22()W K Tg 因此max()()D t kT 其中k=0、1、2……T D =0.64sec如果很小,T D =T222200()49.9/0.64sec 386/sec kips k kips inin 50/k kips in(b )211ln ln n n v v v v 222121()11.2ln0.3330.86210.05292()10.33320.053025.3%(a ’)21D2T21D TT 249.950/1kkips in(c)2c mW mg2T4cTg21D T T 241WcTg2240.05292000.64sec 386/sec 10.0529kipsc in 0.539sec/ckips inT=T D 0.538sec/ckips in 0.54sec/ckips in2-22k m40 4.472(1/sec )(0)(0)()sin(0)costDDDv v t et v t(0)(0)()sin(0)(0)(0))costDDDv v t et v v v t22(0)(0)()(0)cossinDtDDDv v t ev tt21D()(0)cos(0)(0)sintDDDt ev t v v t2(0)(0)()(0)c o s s i n1tD D v v t ev tt 0.055922(2)(4.47)c c cm(a) c=00D5.6(1)sin 4.470.7cos4.47 1.384.47v t in(1) 5.6cos 4.47 4.47(0.7)sin 4.47 1.69/secv t in (1) 1.4v in ,(1) 1.7/secv in (b) c=2.80.0559(2.8)0.15724.4710.1574.41D(1/sec )(0.157)(4.41)5.60.7(0.157)(4.47)(1)sin 4.410.7cos 4.414.41t e(1)0.764t in(0.157)(4.41)20.157(5.6) 4.41(0.7)(1) 5.6cos 4.41sin 4.4110.157t e (1) 1.10/sect in (1)0.76v in ,(1) 1.1/secv in 第三章谐振荷载反应3-1根据公式有21sin sin 1R t wt wt0.8w w2.778sin 0.8sin1.25R twt wt将t 以80°为增量计算)(t R 并绘制曲线如下:0 80°160°240°320°400°480°560°640°720°800°00.5471.71 -0.481 -3.214 0.357 4.33-0.19 -4.9244.9241.25w wt)(t R3-2解:由题意得:22mkips s in ,20kkips in ,(0)(0)0v v ,w w20 3.162sec2k w rad m8wt(a )0c1sin cos 2R twt wt wt将8wt 代入上式得:()412.566R t (b )0.5ck s in0.50.0395222 3.162cc c c mw1exp1cos exp sin 2R twtwtwt wt将8wt 代入上式得:()7.967R t (c ) 2.0ck s in2.00.158222 3.162cc c c mw1exp1cos exp sin 2R twtwtwt wt将8wt 代入上式得:() 3.105R t 3-3解:(a ):依据共振条件可知:1003860.0810.983sec4000k kg wwrad m W由2LTVw 得:10.9833662.96022wL V ft s(b ):122max2221212tgovv 1w w 0.41.2gov in 代入公式可得:max1.921tv in(c ):2L T Vw45m i n 66Vhf t s226611.51336V wrad secL11.513 1.04810.983w w0.4代入数据得:122max22212=1.85512t govv in3-4解:按照实际情况,当设计一个隔振系统时,将使其在高于临界频率比2下运行,在这种情况下,隔振体系可能有小的阻尼。
第九章 结构动力计算一、是非题1、结构计算中,大小、方向随时间变化的荷载必须按动荷载考虑。
2、忽略直杆的轴向变形,图示结构的动力自由度为4个。
3、仅在恢复力作用下的振动称为自由振动。
4、单自由度体系其它参数不变,只有刚度EI 增大到原来的2倍,则周期比原来的周期减小1/2。
5、图 a 体 系 的 自 振 频 率 比 图 b 的 小 。
l /2l /2l /2l /2(a)(b)6、单 自 由 度 体 系 如 图 ,W =98.kN ,欲 使 顶 端 产 生 水平 位 移 ∆=001.m ,需 加 水 平 力 P =16kN ,则 体 系 的 自振 频 率 ω=-40s 1。
∆7、结构在动力荷载作用下,其动内力与动位移仅与动力荷载的变化规律有关。
8、由于阻尼的存在,任何振动都不会长期继续下去。
9、桁 架 ABC 在 C 结 点 处 有 重 物 W ,杆 重 不 计 ,EA 为 常 数 ,在 C 点 的 竖 向 初 位 移 干 扰 下 ,W 将 作 竖 向 自 由 振 动 。
AC10、不 计 阻 尼 时 ,图 示 体 系 的 运 动 方 程 为 :m m X X h EI EI EI EI X X P t 00148242424012312⎡⎣⎢⎤⎦⎥⎧⎨⎩⎫⎬⎭+--⎡⎣⎢⎤⎦⎥⎧⎨⎩⎫⎬⎭=⎧⎨⎩⎫⎬⎭()二、选择题1、图 示 体 系 ,质 点 的 运 动 方 程为 :A .()()()y l P s in m y EI =-77683θ t /;B .()()m y EI y lP s in /+=19273θ t ;C .()()m y EI y l P s in /+=38473θ t ;D .()()()y l P s in m y EI =-7963θ t / 。
ll0.50.52、在 图 示 结 构 中 ,若 要 使 其 自 振 频 率 ω增 大 ,可 以A .增 大 P ;B .增 大 m ;C .增 大 E I ; D .增 大 l 。
结构动力学期末复习题_2014结构动力学期末复习题1. 试用哈密顿原理推证第二类拉格朗日方程。
2. 在允许大变形的情况下,请采用拉格朗日方程求出图示系统在指定的广义坐标下的运动微分方程。
若仅考虑小变形振动,写出其运动微分方程。
图中弹簧1未变形时的原长为1l ,弹簧2未变形时的原长为a 。
5. 试讨论对于多自由度体系如何形成一致质量矩阵、一致刚度(包括几何刚度)矩阵、一致荷载列阵并分析与集中质量矩阵的区别。
6. 一栋多层楼房,在地震地面运动作用下运动,若结构在运动中保持为弹性,弹簧1(a +q )P(t)ym 3q 弹簧22k 22q 1k 1m 1x试述求解该结构弹性动力反应的振型叠加法的原理以及求解步骤。
7. 一栋多层楼房,在地震地面运动作用下运动,结构产生非线性变形,试讨论如果将结构简化为集中质量的串模型,如何采用逐步积分法分析该结构在地震地面运动作用下结构的非线性反应时程,写出线性加速度法、Wilson-θ法、Newmark-β法、中央差分法等几种方法中的一种方法分析求解非线性多自由度体系的动力反应的步骤,并就你所知,讨论用于结构非线性时程反应分析的这些逐步积分方法在稳定性和求解精度方面的优缺点,提出你的改进意见和方法。
8.9. (ρ1()(EI x EI o +=试采用10. 满载时为m 1=为kg m 5002=度为k 350=呈正弦波形,可表示为lza x s π2sin =,其中,m l 5=。
求拖车在满载和空载时的振幅比。
11. 试推导粘性阻尼力在一周内消耗的能量的表达式。
12. 试求振动系统02=++kx x x m nζω在图示方波激励下的稳态受迫振动。
13. 图示结构,受到如图所示周期性荷载,可表示如下的正弦级数:t b t p n n n ωsin )(1∑∞==,其中,n n n p b )1(20--=π,不考虑阻尼,且荷载频率与结构自振频率之比为:431=ωω,试求出结构在此荷载作用下的稳态反应。