状态转移矩阵的性质与计算
- 格式:ppt
- 大小:304.50 KB
- 文档页数:22
状态转移矩阵名词解释
状态转移矩阵是一个用于描述马尔可夫链的概率矩阵。
马尔可夫链是一个具有特定性质的随机过程,即未来的状态只依赖于当前的状态,与过去的状态无关。
状态转移矩阵的每个元素表示从当前状态到下一个状态的转移概率。
假设有n个可能的状态,则状态转移矩阵是一个n×n的方阵。
矩阵的第i行第j列元素表示从状态i到状态j的转移概率。
状态转移矩阵要求其每一行的元素之和等于1,即一个状态必须以某个转移概率转移到所有其他可能的状态之一。
这体现了马尔可夫链的特性,即无论当前的状态如何,下一个状态都是确定的。
状态转移矩阵在许多领域中有广泛的应用,如自然语言处理、图像处理、金融预测等。
通过利用状态转移矩阵,可以计算出马尔可夫链在不同时间步的状态分布,从而预测未来的状态。
马尔可夫模型转移矩阵怎么算马尔可夫模型是用来描述离散随机过程的数学模型,常用于解决序列问题。
在马尔可夫模型中,转移矩阵是一个重要的概念,用来描述状态之间的转移概率。
那么,如何计算马尔可夫模型的转移矩阵呢?首先,我们需要明确什么是马尔可夫链。
马尔可夫链是指一个满足马尔可夫性质的随机过程,即在给定当前状态下,未来的状态只依赖于当前状态,而与过去的状态无关。
这一性质使得马尔可夫链能够简洁地描述一系列随机事件的演化过程。
在马尔可夫模型中,转移矩阵用来表示状态之间的转移概率。
假设我们有n个状态,那么转移矩阵的维度就是n×n。
矩阵中的每个元素表示从当前状态转移到下一个状态的概率。
计算转移矩阵的方法有多种,常见的有频率法和极大似然估计法。
频率法是根据观测数据中的频率来计算转移概率。
具体而言,我们需要统计每个状态出现的频率以及每个状态转移对出现的频率,然后将频率归一化得到概率。
这种方法的优点是简单直观,但对于数据量较小的情况下可能存在估计偏差。
极大似然估计法是基于最大似然估计原理来计算转移概率。
在这种方法中,我们假设转移概率服从某个分布,然后通过最大化观测数据的似然函数来选择合适的分布参数。
这种方法的优点是可以更准确地估计转移概率,但需要对分布进行假设,并且对于数据量较大的情况下计算量较大。
除了这两种方法,还有其他一些基于贝叶斯估计等的计算转移概率的方法,具体选择哪种方法可以根据实际问题和数据情况来确定。
总之,计算马尔可夫模型的转移矩阵是描述离散随机过程中状态之间转移概率的重要步骤。
通过统计观测数据或者使用估计方法,我们可以得到转移矩阵,从而进一步分析和预测随机事件的演化过程。
状态转移矩阵的三种求法一、状态转移矩阵的定义状态转移矩阵,也称为转移概率矩阵,是描述马尔可夫链中状态转移概率的一种数学工具。
在马尔可夫链中,系统的状态会随时间发生改变,而状态转移矩阵则可以描述不同状态之间的转移概率。
二、基本概念和符号定义在讨论状态转移矩阵之前,我们先来了解一些基本概念和符号定义。
1. 状态:指系统所处的特定情况或条件。
在马尔可夫链中,状态可以是离散的,也可以是连续的。
2. 状态空间:指所有可能的状态组成的集合。
3. 转移概率:指一个状态转移到另一个状态的概率。
4. 状态转移矩阵:是一个方阵,其元素表示从一个状态转移到另一个状态的概率。
下面将介绍三种常见的求解状态转移矩阵的方法。
1. 统计法统计法是最常见的求解状态转移矩阵的方法之一。
该方法基于大量的历史数据,通过统计分析来确定状态之间的转移概率。
假设有一个马尔可夫链,其状态空间为S={s1, s2, ..., sn},观测到的历史数据为{X1, X2, ..., Xm},其中Xi表示第i次观测到的状态。
根据统计法,可以通过计算状态转移的频率来估计状态转移概率。
具体做法是统计历史数据中每个状态之间的转移次数,然后除以总的观测次数,得到转移概率的估计值。
2. 最大似然估计法最大似然估计法是一种常用的参数估计方法,也可以用于求解状态转移矩阵。
该方法通过最大化观测数据的似然函数,估计状态转移概率。
假设有一个马尔可夫链,其状态空间为S={s1, s2, ..., sn},观测到的历史数据为{X1, X2, ..., Xm},其中Xi表示第i次观测到的状态。
根据最大似然估计法,可以通过最大化观测数据的似然函数来求解状态转移概率。
具体做法是构建一个似然函数,然后求解使得似然函数取得最大值时的参数值。
3. 马尔可夫链蒙特卡洛法马尔可夫链蒙特卡洛法是一种基于模拟的求解状态转移矩阵的方法。
该方法通过在马尔可夫链上进行随机游走,来估计状态之间的转移概率。
转移矩阵描述
转移矩阵(Transition Matrix),又称跃迁矩阵,是俄国数学家马尔科夫提出的。
他发现,一个系统的某些因素在转移中,第n次结果只受第n-1次结果的影响,即只与当前所处状态有关,而与过去状态无关。
这种性质被称为“无后效性”或“马尔科夫性”。
在具有这种性质的系统中,状态转移的概率可以用转移矩阵来描述。
转移矩阵是一个矩阵,其元素都是非负的,且各行元素之和等于1。
这些元素用概率表示,表示在一定条件下,从一个状态转移到另一个状态的概率。
例如,在市场决策中,转移矩阵的元素可以表示市场或顾客的保留、获得或失去的概率。
转移矩阵有以下特征:
每个元素都是非负的,表示概率不能为负。
每一行元素之和等于1,这是因为一个状态转移到其他所有可能状态的概率之和必须等于1。
转移矩阵在马尔科夫链分析中有着广泛的应用。
马尔科夫链是一种随机过程,其中每个状态的未来变化只依赖于其当前状态,而与过去状态无关。
通过转移矩阵,我们可以计算出在给定初始状态下,经过一定步数后系统处于各个状态的概率分布。
除了马尔科夫链分析外,转移矩阵还广泛应用于其他领域,如物理学中的量子力学、化学中的反应动力学、生态学中的种群
动态等。
在这些领域中,转移矩阵被用来描述系统状态之间的转移概率和动态变化过程。
状态转移矩阵的性质和计算状态转移矩阵(Transition Matrix)是概率论和随机过程中常用的一种数学工具。
它描述了一个马尔可夫链(Markov Chain)中不同状态之间的转移概率,并允许我们通过矩阵运算来计算系统的长期行为。
1.性质:(1)非负性:状态转移矩阵的所有元素都是非负数。
(2)行概率和为1:转移矩阵的每一行的元素之和等于1,即每个状态转移到其它状态的概率之和为1(3)稳定分布性:对于马尔可夫链的状态转移矩阵,存在一个稳定分布向量(Steady State Distribution Vector),使得转移矩阵作用于稳定分布向量后,得到的向量仍然等于稳定分布向量。
2.计算:(1)初等概率法:对于已知的初态概率向量(Initial Probability Vector),可以通过矩阵乘法来计算下一步的状态概率向量。
设初态概率向量为P,状态转移矩阵为T,则下一步的状态概率向量为P' = PT。
持续迭代可以得到任意步后的状态概率向量。
(2)幂法:幂法是计算稳定分布向量的一种有效算法。
设初始向量为P,状态转移矩阵为T,则稳定分布向量为P'=PT,持续迭代可以得到趋于稳定的分布向量。
(3)马尔可夫链的收敛:马尔可夫链的收敛指的是经过多次状态转移后,状态转移概率不再发生变化,系统趋于稳定。
可以通过计算状态转移矩阵的幂次来判断马尔可夫链是否收敛,若存在一个正整数n,使得T^n=T^(n+1),则认为马尔可夫链收敛。
3.应用:(1)马尔可夫链模型:状态转移矩阵是马尔可夫链模型的核心之一,用于描述和分析系统状态的动态变化。
(2)媒体传播:状态转移矩阵可以用于描述媒体传播的行为,比如在社交网络中用户之间的关注关系、消息传播等。
(3)金融市场:状态转移矩阵可以用于描述金融市场中不同状态之间的转移,并通过矩阵运算来计算投资组合的风险和收益。
(4)自然语言处理:状态转移矩阵可以用于语言模型中,描述不同词语之间的转移概率,帮助进行语言生成和理解。
具有共轭复数重极点系统的一种状态转移矩阵共轭复数重极点系统是一种常见的控制系统,其特点是系统的极点成对出现,且均为共轭复数。
这种系统常常出现在电子电路、机械控制、信号处理等领域中,其稳定性和性能对系统的运行至关重要。
在控制系统设计中,通常需要对系统进行状态转移矩阵的计算,以便进行系统分析和控制器设计。
本文将介绍一种适用于具有共轭复数重极点系统的状态转移矩阵计算方法。
一、共轭复数重极点系统的特点共轭复数重极点系统是指系统的极点成对出现,且均为共轭复数。
例如,系统的极点可能为:$$s_{1,2} = -alpha pm jbeta$$其中,$alpha$和$beta$为实数。
此时,系统的传递函数可以表示为:$$G(s) = frac{K}{(s+s_1)^m(s+s_2)^m}$$其中,$K$为常数,$m$为极点重数,$s_1=-alpha+jbeta$和$s_2=-alpha-jbeta$为共轭复数重极点。
共轭复数重极点系统具有以下特点:1. 系统的极点成对出现,且均为共轭复数。
2. 极点重数可能大于1,即存在多个相同的共轭复数极点。
3. 系统的阶数为偶数。
4. 系统的频率响应具有一定的对称性,即在实轴左侧与右侧具有相同的幅频特性和相位特性。
二、共轭复数重极点系统的状态空间表示共轭复数重极点系统可以通过状态空间表示进行描述。
假设系统的状态向量为$x=[x_1,x_2,cdots,x_n]^T$,系统的输入向量为$u=[u_1,u_2,cdots,u_k]^T$,系统的输出向量为$y=[y_1,y_2,cdots,y_p]^T$。
则系统的状态空间模型可以表示为: $$begin{cases}dot{x} = Ax+Buy = Cx+Duend{cases}$$其中,$A$为$ntimes n$的状态转移矩阵,$B$为$ntimes k$的输入矩阵,$C$为$ptimes n$的输出矩阵,$D$为$ptimes k$的直接传递矩阵。
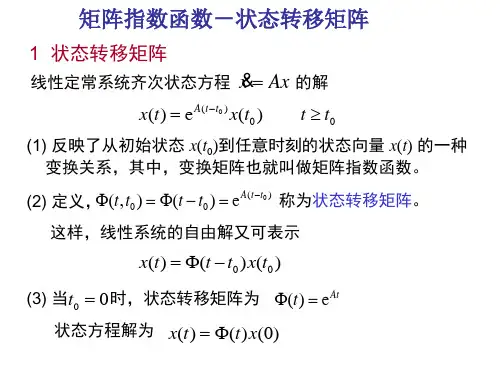
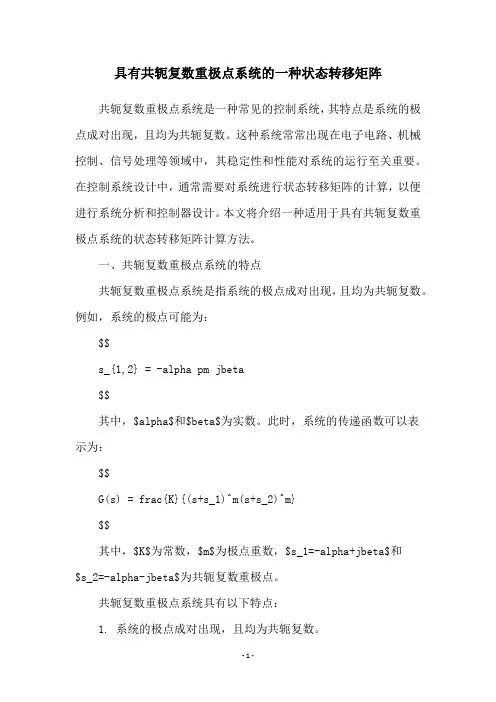
![[doc]状态转移矩阵及系统响应函数](https://uimg.taocdn.com/a0057199cd22bcd126fff705cc17552706225e54.webp)
状态转移矩阵及系统响应函数航天控制1991年第3期状态转移矩阵及系统响应函数李振涛北京航天自动控制研究所文摘本文分析7系统状态转移矩阵及函数矩阵L的性质.给出7新的彼此转换关系推导了系统的输入信号响应函数,及积分响应函数的表达式,说明7它们的计算方法.主题词线性系统状态方程转移矩阵响应引言有一个系统:A(t)X+F(X,X.,u),初值00)=Xo(1)设(1)为Ⅳ阶连续系统,A(t)x为由右函数中分离出来的线性部分.控制信号的表达式为U=u(x,X)(2)非线性的右函数F(X,X,U)中可有与系统参数无关的强迫向量.A(t)是N×N可微连续矩阵,右函数可积,即系统(1)可解.如系统(1)可线性化(或在其离散化的一个采样区间内),则右函数必可写成下式,,)1一}(3)U(X,X)J又X=,(X)‟即右函数与系统状态无关,在采样点上即可完全确定其性质.这样的系统称线性系统,可由线性理论求解与控制.如系统(1)的右函数不可化为(3)式,则为非线性系统.通常非线性系统的X,X,U)中含有不可忽略的X的高阶项.因此把线性项A(t)X分离出来,一般不带来求解与控制的方便性,也就是仍可把A(t)X部分并人右函数F(X,X,∽之中.即令系统(1)中之A(t)为零矩阵.,这样,系统方程(1)即表示了一个一般的连续系统.线性系统时,它满足(3)式;非线性系统时令A(t)=0.注:黑体为矩阵~8~{●●■●●一,状态转移矩阵e(t,c)及LM函数矩阵1.状态转移矩阵表达式/已知线性系统的状态转移矩阵西(f,i)的表达式如下”西~M(tp,l,0主L(tp,0,m㈤且有下式存在西(f_:M(tp,l,0(5)(tp,r=可见式(4)即为dP(t,f)一dP(t,t)dP(t,f).此是状态转移矩阵的传递性e 计算参考时刻t是任选的系统定义域内的用以计算M,L函数矩阵的时刻,用M,L系数矩阵可计算出系统由t点开始”向前与”向后的状态转移矩阵,从而即可计算出任意区段(T,f)的状态转移矩阵.由此可看出西,L,M函数矩阵的如下诸性质:性质1M(t,,l,0L(t,,0,『)‟是系统状态转移矩阵西(f,,)的”向前泰勒展式与”向后泰勒展式的系数..由式(5)可看出有…l_M(t,l,0)afJ一I—p(6)l—L(tp,)afllf一,pM(t,,0)与L(f,,0,『】之间的关系可由L(f,k,,)作为中间变量表达如下: M(,,.)毛‟一)cL(t,l--k,k)t(Ip,『】:一圭c;董c:L(f,一‟,一l一),zA+j(f,)={一i9两个互逆状态转移矩阵的表达式分别可写成下式:砉:主L.川圭L.o1~-o1],o)性质2(t,t)可由二相同自变量(t~t)的幂级数表示,此二幂级数的系数M(t,1,0)与(一1)L(t,0,f)不同.性质3函数矩阵L(z,0,f)‟M(T,,,0),J|=0,1,2…组成T点的两个收敛幂级数,在此幂级数的自变量At=t—f相同时,此二幂级数互逆.显然,因(f,T)(T,)=L且T可以是系统(1)定义域内的任意时刻.2.状态转移矩阵的微分表达式由式(8)微分,有:掣dt=塞M,,∞P‟‟=.to!,m+v)dt,.=子rn[,…‟‟:主M(f,,0)ff1‟‟由于状态转移矩阵的递性,可将(:)写下式(,tp)(f,t,)(f,t,)罔而右将式(9)代人上式,一l0一(r,f).(,f):攀(dtPp:mn枷(fI{一并分别取值等于,与,时,则状态转移矩阵的微分表达式为:M)dt)dt(9一1)f9—2)(10—1)(10—21It●零(11)中的f与f可互换.[对应于式(9—2)i.性质4系统(1)的状态转移矩阵满足如下齐次方程组(共轭方程) dt:一(f,fP).A(f)…‟,‟,_A(f).,)……,(12)已知L(z,0,,)=一A(T),M(T,,,0)A(T)再考虑到式(11)即可得上式.3.函数矩阵M(t,f,0)与IXt,0,,)问的转换公式已知(f,f(T,t)=I(13)对t微分v阶,视f=t=常数.则有:dOl~(z,Oddt={.0一r….o,v>将式(9一1)代人(14),得—d【(f,f),f)]f=垂[M(z,l--m+v--i,O).L(,o,…)]一J一0…=Oi一0一,=o;(15)0.v>0.当v=0时,上式为:I=∑∑cM(f,,一,0)L(z,0,)=M,o,o)L(0,o)+∑i二;L∑CIM(~,f一卅,0)L,0,)故有:∑i∑cM(f,f一Ⅲ,o)L(f,o,Ⅲ)=o06)在v≠0时,式(15)在任意(t—T)下恒等于零.已知此幂级数收敛,由代数相关定理知,该幂级数的各阶系数恒等于零再与式(n6)比较,可知有:(下式也可由式(11)直接推出)Mcz,v--i,0L{(17i0,‟v同理可推出:Lct,O,v-i={(18In▲‟‟t可是系统(1)定义域内的任意时刻.由此可推出如下递推转换公式L(t,0,O)=M(t,0,o)=Ii(t,v,o)=一∑cM(f,v—f,O)L(t,0,f)J一1L(t,0,v)=一∑cL(f,0,v—i)M(t,i,o)(19)上式有很好的对称性..又知●…一【0)L(t,0,v)=一∑cL(f,0,v一1一)A(f)(2o)一0.用式(19),(2O)即可由系统的A(f)矩阵,直接计算出所需的L(t,0,v),M(t,v,O),并由此计算出系统(1)的状态转移矩阵.函数矩阵L(t,O,v),M(t,v,2),2≠0也是很有用的,它们分别是状态转移矩阵的某种混合偏导数.在计算积分响应函数时即要用到.M(t(f,0,0)=L(t,0,0)=I1M(t,v,)=L(t,i,v)=0,当z≠0或v≠O时J(f,t)I二,系统响应函数(27)(28)把系统(1)写成下列形式,以研究其对控制信号的响应函数.=A(f)+s(t)v,x(t0)=0(29)Y=c(t)xA(O,B(f),c(f)均为连续函数矩阵.设r维控制向量可展成时同的幂级数,如下:化成首l形式U—u敢f)u…(f—fP)“tu,.m“J(,)“fJO一,.,O—fP)‟可一Oo 0..;Ⅱ”00(30)设控制信号的第』分量的不为零的最低阶系数为”(f.).为说明方便,设各分量的首项均为i.项,且有相同的首项系数”(.).这样.)就是一个各分量相等的常向量(对实际系统不必使其各分量相等,只要使i对齐即可).设B(f)有与A()形式相同的展开形式,则B(t).us…()可写成如下展式s∽_B(:ys()(32)则常输入)的系统响应函数如下:一13一;.H(f,f0)I(f,T)s(r)出(33)nH(t,f.)的表达式可用与状态转移矩阵积分相同的方法求得将式(4)代人上式:.,害=…,~Ls(tp,m)mLs(f,,)L(f,Oj)S(,)因而有H(t,toct,tp)~Ls一)[一]系统响应函数H(f,f.)中的f.表示输入的作用起始时间.计算参考时刻f的取值不影响响应函数的值.一般令f为输入的作用端点,计算最为简单.其表达式为:当fto时当f:时(37)(38)2.脉冲响应函数当输人为=f)时,(35)与(36)即为系统的脉冲响应函数,其表达式可直接写成.14——t●●●H(t,to)中(u)Ls(,m)tn一)如系统又有B(t)=I且rN时,则脉冲响应函数为H(t,t)=e(t,T)3.其它响应函数当输人为fu(i0)≠0LU(i)=0,i≠i(39)(4O)(41)此时有::二L式(35)与(36)即为系统的f阶斜坡响应函数.f如系统的B(t)特殊,能使S(t)化为单位矩阵,则其退化为阶跃响应函数,即式(38)表示的H(t,t)可是特殊设计的B(f)的i阶斜坡响应函数(系统综合问题,此处设B(t1是可改变的网络).当系统输入有:.;l(42)U(i)0,i>iJ则式(36)表示的是系统的f次函数响应函数.如此类推,可以得到系统的输人为已知函数(3O)的各种特殊响应函数.求褥响应函数H(t,t)后,对应于各种输入的输出表达式即可写成下式: (f)e(t,tn)(fD)+H(t,to)i.)(43)三,系统的积分响应函数1.积分响应函数表达式当系统(29)的输入信号U难于表达成式(30)形式时,最好用积分响应函数来求解系统仍将系统写成式(1)形式:XA(t)X+F(t),X0(44)Y=c(t)x则系统对右函数的响应可写成s(f)=∑Q(t,f.,V)F(f)Y=n”十_J(45)rrF(f)=l,(T)~l5一Q(t,f,v)是系统右函数f)的v+l阶积分的响应函数其表达式为9)tto时Q(fIf0j):_1).掣fa中(fn,f)ttf时的计算公式最简单,(50)ft0时,Q(t,f0,V)的计算较复杂当f—fo很大时,(f.t.)可用分段计算法求得;但£的计算却遇到了麻烦方便的计算方法仍然是使用式(47),计算中选at择t值,以使|卜--不大,则计算很易实现.求得积分响应函数后,则系统解即可写为下式:f)(f,t0)0+∑Q(t,t0,V)F(f)(51)2.特殊系统的积分响应函数Q(t,t0,V)与H(f,t.)的差别是Q(f,t,v)中没有包含B(f)与等信息.故更易直接化简:一l6一4●●■当系统为定常系统时,有:Q(t,t,V)一A,Q(t,t.,0)中(f.t.)=P….故定常系统解为(f)=P卜x(to)+∑A,(f)-=0JJ当系统(1)为非线性系统时,ACt)=0故有Q(t,to,v)iv≠0orI.v=,t0)I由此推得的系统(1)的解即为一般熟知形式:x(t)=x(to)+F(t)可见连续系统,当为线性系统时,有很多可供分析使用的手段有参考文献(52)(53)(54)(55)对非线性系统却没【1]李振涛,线性时变系统的状态转移矩阵,宇航,1986年第1期,p.33 【2]李振涛,变参数线性常微分方程组的积分型级数解,宇航,1987年第2期,p.36STA TETRANSFERMA TRIXANDSYSTEMRESP0NSEFUNCT10NLiZhenta0BeijingAerospaceAutomaticControlInstitute AbshtThepaperanalysestheL.Mpropertiesofsystemstatetransfermat~‟ixa ndfunctionmatrix.Anewtransformationrelationshipbetweenthemisgiven.Theexpress ionsoff船re- sponsefunctionofsysteminputsignalandintegralresponsefunctionaredevir ed0wfandtheircomputingmethodsarealsodeseribed. SubjecttermLinersystemEquationofstateTransferMatrixResponse—l7一。
过渡矩阵的求法介绍过渡矩阵是在马尔可夫链中使用的一种概率矩阵,用于描述状态之间的转变情况。
在本文中,我们将探讨过渡矩阵的求法,以及它在现实生活和学术研究中的应用。
马尔可夫链简介马尔可夫链是一种数学模型,用于描述在概率框架下状态之间的转移过程。
它的特点是当前状态仅与前一个状态有关,与之前的状态无关。
马尔可夫链的一个核心概念就是过渡矩阵。
过渡矩阵定义过渡矩阵是一个方阵,其元素表示从一个状态转移到另一个状态的概率。
假设有n 个可能的状态,那么过渡矩阵是一个n×n的矩阵。
过渡矩阵的性质过渡矩阵的性质如下: 1. 过渡矩阵的元素必须是非负的。
2. 过渡矩阵的每一行元素之和必须为1。
求解过渡矩阵的方法基于观察数据的求解方法当已知观察数据时,可以通过统计的方法求解过渡矩阵。
以下是基于观察数据的求解方法的步骤: 1. 收集观察数据,记录状态之间的转变情况。
2. 统计每对状态的转变次数。
3. 根据统计结果计算过渡概率,即过渡矩阵的元素。
基于马尔可夫假设的求解方法在某些情况下,我们可能无法直接观察到状态之间的转变情况,但是可以根据领域知识和假设来确定过渡概率。
这种方法基于马尔可夫假设,即当前状态只与前一个状态有关。
以下是基于马尔可夫假设的求解方法的步骤: 1. 确定状态集合,假设有n个状态。
2. 假设过渡概率矩阵为P,其中P[i][j]表示从状态i转移到状态j的概率。
初始化P为一个n×n的零矩阵。
3. 根据领域知识和马尔可夫假设,为P赋予合适的初值。
4. 对于所有的i,计算P的第i行元素之和,将其用于归一化每一行,使得每一行元素之和为1。
5. 重复步骤4,直到P的每一行元素之和都为1,求解过渡矩阵完成。
过渡矩阵的应用过渡矩阵在很多领域都有广泛的应用: 1. 自然语言处理:过渡矩阵可以用于模型训练和预测,例如语言模型和机器翻译。
2. 经济学:过渡矩阵可以用于预测经济指标的未来走势,例如股票价格和国内生产总值。
状态转移矩阵的性质与计算
首先,状态转移矩阵的所有元素都必须是非负的,并且每一行的元素之和必须等于1、这是因为每个状态转移到其他状态的概率之和必须等于1,表示一个状态必须转移到其他状态。
其次,状态转移矩阵的幂运算可以用来计算从一个状态转移到另一个状态的概率。
具体地说,状态转移矩阵的n次幂的第i行第j列的元素表示从状态i转移到状态j经过n步的概率。
这个计算方法可以用来预测未来的状态,或者计算一个状态在未来一些时间点的概率分布。
另外,状态转移矩阵还可以用来计算稳态分布。
稳态分布是指在长期运行下,马尔可夫链中各个状态的概率分布趋于稳定的分布。
可以通过状态转移矩阵的特征向量来计算稳态分布。
具体地说,如果矩阵A是状态转移矩阵,那么它的特征向量v对应的特征值为1,且特征向量的元素之和为1,那么v就是A的稳态分布。
这个计算方法可以用来分析马尔可夫链的长期行为。
状态转移矩阵的计算方法有多种。
一种方法是根据实际数据来估计状态转移概率。
例如,如果我们观察到一系列状态转移的数据,可以通过统计每个状态转移到其他状态的次数来估计状态转移概率。
另一种方法是根据系统的特性来确定状态转移概率。
例如,在一些简单的马尔可夫链中,状态转移概率可能是根据一些规律或者经验确定的。
总结起来,状态转移矩阵是描述马尔可夫链中状态之间转移概率的矩阵。
它具有非负性和行之和为1的性质,可以用来计算从一个状态转移到另一个状态的概率。
状态转移矩阵的幂运算和特征向量计算方法可以用来
预测未来的状态和计算稳态分布。
状态转移矩阵的计算可以根据实际数据或者系统特性进行。
状态转移矩阵的计算方法
1. 嘿,你知道吗?状态转移矩阵的计算方法之一就是直接按照定义来呀!就像我们走路,一步一个脚印,老老实实地去计算每个状态之间的转移概率。
比如说掷骰子,从一个点数到另一个点数的概率不就是状态转移嘛,很简单吧?
2. 还有哦,通过迭代的方法也能算出状态转移矩阵。
这就好像搭积木,一层一层地往上垒,逐渐找到那个最终的结果。
比如说一个生物种群的变化,不就是这样一步步迭代着计算状态变化嘛!
3. 哇塞,竟然还能用矩阵乘法来搞定状态转移矩阵的计算呢!这就好比给不同的元素配上对,让它们相乘之后得出新的结果。
想想机器人在不同状态间的转换,是不是很神奇呢?
4. 嘿呀,通过求解线性方程组也能行呢!这就如同在迷雾中寻找出路,解出那些方程就找到了正确的路径呀。
比如在一个复杂的系统中,找到状态转移的规律就是这么厉害!
5. 你可别小看了利用马尔科夫链的性质来计算哦!这就好像抓住了事物的本质特点,一下子就把状态转移矩阵搞清楚了。
就像股票的涨落,不就可以用这个方法来分析嘛!
6. 还有一种方法是基于概率统计呀!这简直就是在数据的海洋中寻宝。
比如分析天气的变化模式,不就是从大量的数据中找出状态转移的规律吗?
7. 哇哦,根据模型假设来计算状态转移矩阵也很不错呢!就如同给一个故事设定好情节,然后顺着情节发展去计算。
想想一个游戏中的角色状态变化,是不是很有道理呀?
8. 嘿嘿,最后说说利用数值计算的方法。
这就类似用精确的工具去打造一件完美的作品。
比如模拟物理现象中的状态转移,靠的就是这个厉害的方法呢!
总之,状态转移矩阵的计算方法有很多,就看你怎么去用啦!掌握了这些,就能在各种领域大显身手啦!。
时间序列的状态转移矩阵
时间序列的状态转移矩阵是指将一组时间序列数据转化成一个
状态空间模型,从而可以通过状态转移矩阵来描述时间序列的动态演化过程。
在时间序列的状态空间模型中,常常将观测值序列表示为一些隐含状态的函数,这些状态在不同时间点上的演化是由状态转移矩阵来描述的。
状态转移矩阵通常是一个方阵,它的行和列均为隐含状态的数量。
矩阵中的每个元素都表示从一个状态转移到另一个状态的概率值。
因此,状态转移矩阵可以用来描述时间序列中状态的演化过程,从而可以预测未来的状态。
在实际应用中,状态转移矩阵的构建通常需要依赖领域知识和数据分析。
具体来说,需要先对数据进行建模,根据模型得到隐含状态的数量以及状态之间的关系,然后通过最大似然估计等方法来确定状态转移矩阵。
除了用于预测时间序列的未来状态外,状态转移矩阵还可以用于分析时间序列的结构和动态特性。
通过对状态转移矩阵的分析,可以发现时间序列中的周期性、趋势、季节性等特征。
这对于深入理解时间序列的动态特性和规律具有重要的意义。
- 1 -。
状态转移概率矩阵的特征
状态转移概率矩阵是一种用于描述系统状态之间转移的概率的矩阵。
它是一种重要的概率模型,可以用来描述系统的行为,并用于预测系统的未来状态。
状态转移概率矩阵是一种矩阵,它由一系列的状态和一系列的概率值组成。
每一行代表一个状态,每一列代表一个可能的转移状态,每一个元素代表从一个状态转移到另一个状态的概率。
状态转移概率矩阵具有一些特征,首先,它是一个方阵,每一行和每一列都有相同的状态数量。
其次,每一行的概率和都是1,因为每一个状态都有一定的概率转移到另一个状态。
此外,每一行的概率值都是非负的,因为概率值不能为负。
最后,每一行的概率值都是相互独立的,因为每一个状态的转移概率不会受到其他状态的影响。
状态转移概率矩阵是一种重要的概率模型,它可以用来描述系统的行为,并用于预测系统的未来状态。
它具有一些特征,如方阵结构、每一行概率和为1、每一行概率值都是非负的、每一行概率值都是相互独立的等。
它可以用来描述系统的行为,并用于预测系统的未来状态,是一种重要的概率模型。