状态转移矩阵判定条件小论文
- 格式:docx
- 大小:227.60 KB
- 文档页数:3
状态转移概率矩阵计算摘要:1.状态转移概率矩阵的概念2.状态转移概率矩阵的计算方法3.状态转移概率矩阵的应用正文:一、状态转移概率矩阵的概念状态转移概率矩阵是在马尔可夫过程中,描述系统从某一状态转移到另一状态的概率分布的矩阵。
在马尔可夫过程中,系统的状态转移是随机的,且只与当前状态有关,与过去状态无关。
状态转移概率矩阵是一个方阵,行和列分别对应系统的所有可能状态。
矩阵中的每个元素表示从当前状态转移到对应状态的概率。
二、状态转移概率矩阵的计算方法状态转移概率矩阵的计算方法有多种,以下介绍两种常用的方法:1.直接计算法对于具有n 个状态的马尔可夫过程,假设状态转移概率矩阵为P,那么P 的第i 行第j 列元素表示从状态i 转移到状态j 的概率,可以通过如下公式计算:P(i, j) = (观测到从状态i 转移到状态j 的次数+ 1) / (总的观测次数+ n)2.隐马尔可夫模型算法在实际应用中,通常使用隐马尔可夫模型(HMM)算法来估计状态转移概率矩阵。
该算法的基本思想是利用训练数据中的观测序列和状态序列,通过最小二乘法或其他优化算法来估计状态转移概率矩阵。
具体步骤如下:(1)初始化状态转移概率矩阵P 为任意值。
(2)根据训练数据中的观测序列和状态序列,计算观测概率矩阵O 和观测概率矩阵I。
(3)利用最小二乘法或其他优化算法,求解状态转移概率矩阵P,使得观测概率矩阵O 和观测概率矩阵I 的乘积等于观测序列的概率分布。
(4)不断迭代,直到状态转移概率矩阵P 收敛。
三、状态转移概率矩阵的应用状态转移概率矩阵在实际应用中有广泛的应用,例如:1.在马尔可夫过程中,用于描述系统的状态转移规律,预测未来状态的概率分布。
2.在隐马尔可夫模型中,用于估计状态转移概率,从而推测隐藏状态序列。
随机过程中的马尔可夫性质与转移矩阵随机过程是概率论中的一个重要概念,它描述了随机变量随时间的变化规律。
而马尔可夫性质则是随机过程中一个重要的性质,它表示在给定当前状态下,未来的状态只依赖于当前状态,而与过去的状态无关。
转移矩阵是用来描述马尔可夫过程中状态之间转移的概率的矩阵。
本文将详细介绍随机过程中的马尔可夫性质与转移矩阵。
1. 马尔可夫性质马尔可夫性质是指一个随机过程在给定当前状态下,未来的状态只依赖于当前状态,而与过去的状态无关。
换句话说,一个随机过程满足马尔可夫性质,当且仅当对于任意的状态序列和任意的时刻,有以下条件成立:P(X_{n+1} = x_{n+1} | X_n = x_n, X_{n-1} = x_{n-1}, ..., X_0 = x_0) = P(X_{n+1} = x_{n+1} | X_n = x_n)其中,X_n表示随机过程在时刻n的状态,x_n表示X_n可能取的值。
马尔可夫性质的直观解释是,未来的状态只与当前状态有关,与过去的状态无关。
这个性质在许多实际问题中都是成立的,比如天气预测、股票价格预测等。
因此,马尔可夫性质在概率论和统计学中有着广泛的应用。
2. 转移矩阵转移矩阵是用来描述马尔可夫过程中状态之间转移的概率的矩阵。
对于一个具有n个状态的马尔可夫过程,其转移矩阵是一个n×n的矩阵,记作P。
其中,P_{ij}表示从状态i转移到状态j的概率。
转移矩阵的性质有两个重要的特点:非负性和行和为1。
非负性表示转移矩阵的元素都是非负数,而行和为1表示每一行的元素之和等于1。
这两个性质保证了转移矩阵的合法性,使得它可以描述状态之间的转移概率。
在实际应用中,转移矩阵可以通过观测数据进行估计。
通过统计观测到的状态转移次数,可以得到转移矩阵的估计值。
这种方法被广泛应用于信号处理、机器学习等领域。
3. 马尔可夫链马尔可夫链是一种特殊的随机过程,它满足马尔可夫性质。
一个马尔可夫链可以用转移矩阵来描述。
状态转移矩阵的三种求法一、状态转移矩阵的定义状态转移矩阵,也称为转移概率矩阵,是描述马尔可夫链中状态转移概率的一种数学工具。
在马尔可夫链中,系统的状态会随时间发生改变,而状态转移矩阵则可以描述不同状态之间的转移概率。
二、基本概念和符号定义在讨论状态转移矩阵之前,我们先来了解一些基本概念和符号定义。
1. 状态:指系统所处的特定情况或条件。
在马尔可夫链中,状态可以是离散的,也可以是连续的。
2. 状态空间:指所有可能的状态组成的集合。
3. 转移概率:指一个状态转移到另一个状态的概率。
4. 状态转移矩阵:是一个方阵,其元素表示从一个状态转移到另一个状态的概率。
下面将介绍三种常见的求解状态转移矩阵的方法。
1. 统计法统计法是最常见的求解状态转移矩阵的方法之一。
该方法基于大量的历史数据,通过统计分析来确定状态之间的转移概率。
假设有一个马尔可夫链,其状态空间为S={s1, s2, ..., sn},观测到的历史数据为{X1, X2, ..., Xm},其中Xi表示第i次观测到的状态。
根据统计法,可以通过计算状态转移的频率来估计状态转移概率。
具体做法是统计历史数据中每个状态之间的转移次数,然后除以总的观测次数,得到转移概率的估计值。
2. 最大似然估计法最大似然估计法是一种常用的参数估计方法,也可以用于求解状态转移矩阵。
该方法通过最大化观测数据的似然函数,估计状态转移概率。
假设有一个马尔可夫链,其状态空间为S={s1, s2, ..., sn},观测到的历史数据为{X1, X2, ..., Xm},其中Xi表示第i次观测到的状态。
根据最大似然估计法,可以通过最大化观测数据的似然函数来求解状态转移概率。
具体做法是构建一个似然函数,然后求解使得似然函数取得最大值时的参数值。
3. 马尔可夫链蒙特卡洛法马尔可夫链蒙特卡洛法是一种基于模拟的求解状态转移矩阵的方法。
该方法通过在马尔可夫链上进行随机游走,来估计状态之间的转移概率。
转移矩阵描述
转移矩阵(Transition Matrix),又称跃迁矩阵,是俄国数学家马尔科夫提出的。
他发现,一个系统的某些因素在转移中,第n次结果只受第n-1次结果的影响,即只与当前所处状态有关,而与过去状态无关。
这种性质被称为“无后效性”或“马尔科夫性”。
在具有这种性质的系统中,状态转移的概率可以用转移矩阵来描述。
转移矩阵是一个矩阵,其元素都是非负的,且各行元素之和等于1。
这些元素用概率表示,表示在一定条件下,从一个状态转移到另一个状态的概率。
例如,在市场决策中,转移矩阵的元素可以表示市场或顾客的保留、获得或失去的概率。
转移矩阵有以下特征:
每个元素都是非负的,表示概率不能为负。
每一行元素之和等于1,这是因为一个状态转移到其他所有可能状态的概率之和必须等于1。
转移矩阵在马尔科夫链分析中有着广泛的应用。
马尔科夫链是一种随机过程,其中每个状态的未来变化只依赖于其当前状态,而与过去状态无关。
通过转移矩阵,我们可以计算出在给定初始状态下,经过一定步数后系统处于各个状态的概率分布。
除了马尔科夫链分析外,转移矩阵还广泛应用于其他领域,如物理学中的量子力学、化学中的反应动力学、生态学中的种群
动态等。
在这些领域中,转移矩阵被用来描述系统状态之间的转移概率和动态变化过程。
匀速直线运动是物体在一定时间内以恒定速度沿着直线运动的一种运动状态。
在匀速直线运动过程中,物体的位置随时间的变化呈现出直线性、均匀性的特征,而速度大小和方向保持不变。
匀速直线运动是物体运动的一种理想模型,在实际应用中也有着重要的作用。
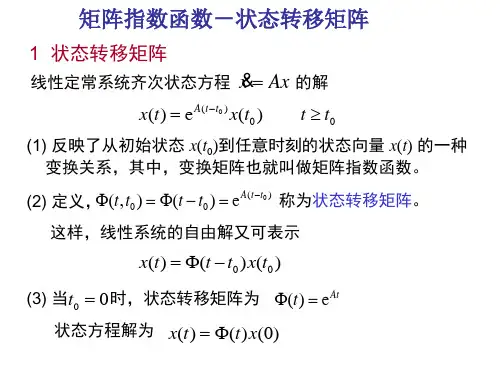
状态转移矩阵是描述系统状态随时间变化的数学工具,它将系统的当前状态和下一个时刻的状态之间的转移关系进行了抽象和描述。
状态转移矩阵在匀速直线运动中具有重要的意义,可以帮助我们更好地理解和分析物体的运动规律。
而方差矩阵则是描述随机变量离散程度的数学工具,在匀速直线运动中用于描述物体位置的不确定性和波动性。
通过分析方差矩阵可以更加全面地了解物体在运动过程中可能出现的位置变化情况,从而为我们提供更准确的运动预测和分析。
接下来,我们将分别对匀速直线运动、状态转移矩阵和方差矩阵进行深入探讨,以期更好地理解这些概念在物理学和数学领域中的重要应用和意义。
一、匀速直线运动1.匀速直线运动的定义匀速直线运动是指物体在一定时间内以恒定速度沿着直线运动的过程。
在匀速直线运动中,物体的速度大小和方向保持不变,位置随时间的变化成等差数列,表现出直线性、均匀性的运动规律。
匀速直线运动是物理学中的一种理想模型,在实际应用中有着广泛的应用。
2.匀速直线运动的数学描述在数学上,匀速直线运动可以通过位置-时间函数来描述。
假设物体在t=0时刻的位置为x0,速度为v,则物体在任意时刻t的位置可以表示为x(t) = x0 + vt。
这个函数描述了物体在匀速直线运动过程中位置随时间的变化规律。
3.匀速直线运动的应用匀速直线运动在现实生活和工程技术中有着重要应用。
在交通工程中,我们可以通过对车辆的匀速直线运动进行模拟和分析,来优化交通路线和提高交通效率。
在机械工程中,我们可以通过对机械零件的匀速直线运动进行建模和仿真,来提高机械设备的运行稳定性和效率。
二、状态转移矩阵1.状态转移矩阵的定义状态转移矩阵是描述系统状态随时间变化的数学工具。
应用随机过程论文题目:马尔科夫发展与应用班级:2012级统计1班姓名:***学号: ***********摘要现实生活中,人脸识别以及股市走势预测等实际问题都具有马尔科夫性,即未来的走势和演变仅仅与当前的状态有关而不受过去状态的影响。
本文介绍马尔科夫过程及马尔科夫链的发展过程与应用,运用其性质建立了以下几个问题的马尔科夫预测模型并做出了预测分析。
关键字马尔科夫过程马尔科夫链人脸识别股市预测目录前言 (1)一.随机过程发展简述 (2)二.马尔科夫过程发展简述 (2)2.1马尔科夫过程简介 (2)2.2 马尔科夫过程的发展 (3)三.马尔科夫过程的应用举例 (5)3.1、股票市场走势预测 (5)3.2、人脸识别模型 (6)四.马尔科夫链的定义和性质 (8)五.马尔科夫链的应用背景 (9)六.马尔科夫链在各个领域的应用 (9)6.1马尔科夫链在教育领域的应用 (9)6.2马尔科夫链在经济领域的应用 (10)6.3马尔科夫链理论在医学卫生领域的应用 (11)6.4马尔科夫链在遗传学领域中的应用举例 (12)七.总结 (13)八.参考文献 (14)前言马尔科夫链预测法是应用概率论中马尔科夫链的理论与方法,来研究分析某些动态系统的发展变化过程,并预测其发展变化趋势的一种预测方法,它是现代预测方法中的一种,具有较高的科学性,准确性和适应性,在现代预测方法中占有重要的地位。
在国外,它不仅广泛应用在自然科学领域,还应用在经济领域。
在我国,它主要应用于水文,气象,地震等自然科学技术的预测,近年在产品市场占有率预测和经济决策中也有所应用。
为了有效的利用这个工具,解析一下它的基本原理,研究它的应用,这对深入理解,推广应用马尔科夫链预测法,提高预测质量,发挥该预测法的效力将是有益的。
本文拟从最原始的数学定义出发,逐步讨论它的转移概率矩阵。
我们采用马尔科夫链的建模方法,就马尔科夫模型在股市预测、人脸识别等几个方面的应用进行探讨。
matlab 状态转移矩阵摘要:1.状态转移矩阵的定义与性质2.状态转移矩阵在MATLAB中的表示与计算3.状态转移矩阵的应用领域4.MATLAB中状态转移矩阵的实际操作演示正文:状态转移矩阵是控制系统中的一个重要概念,它用于描述系统状态随时间的变化规律。
在MATLAB中,我们可以通过矩阵运算来表示和计算状态转移矩阵,进一步应用于各种实际问题。
1.状态转移矩阵的定义与性质状态转移矩阵是一个方形矩阵,通常用P表示,其元素由系统的状态变量及其导数构成。
状态转移矩阵具有以下性质:- 行列式为1:det(P) = 1- 矩阵的幂等于其自身:P^n = P,对于任意正整数n- 迹为零:trace(P) = 02.状态转移矩阵在MATLAB中的表示与计算在MATLAB中,我们可以用符号或者数值的方式表示状态转移矩阵。
例如,假设有一个状态转移矩阵P,可以表示为:P = [1, 1; 0, 1]或者P = [1, 1; 0, 1] * [1, 0; 0, 1]在MATLAB中,我们可以使用如下的命令来计算状态转移矩阵的幂或者迹:```matlabP = [1, 1; 0, 1];P^2trace(P)```3.状态转移矩阵的应用领域状态转移矩阵广泛应用于控制理论和系统科学中,例如在稳定性分析、状态观测器设计、最优控制等问题中,状态转移矩阵都是关键的数学工具。
此外,状态转移矩阵在机器学习、信号处理等领域也具有重要的应用价值。
4.MATLAB中状态转移矩阵的实际操作演示下面我们通过一个简单的例子,演示如何在MATLAB中使用状态转移矩阵求解线性系统的稳定性问题。
假设我们有一个线性时不变系统,其输入信号x(t)和输出信号y(t)的关系可以表示为:y(t) = Ax(t) + Bu(t)其中A和B分别是系统的状态转移矩阵和控制矩阵。
我们可以通过MATLAB编写如下代码,计算系统的稳定性:```matlabA = [1, 1; 0, 1]; % 状态转移矩阵B = [0, 1]; % 控制矩阵% 构造输入信号和系统矩阵= 10; % 信号长度T = 1; % 采样时间x = [1, 0, 0, ..., 0]; % 初始状态y = zeros(n, 1); % 输出信号for t = 1:ny(t) = A * x(t) + B * u(t);end% 计算系统的稳定性eig_values = eig(A);stability = (eig_values(1) > 0) && (eig_values(2) < 0);disp(["系统稳定性:", num2str(stability)]);```以上代码首先定义了状态转移矩阵A和控制矩阵B,然后构造了一个线性时不变系统。
状态转移矩阵及系统响应函数航天控制1991年第3期状态转移矩阵及系统响应函数李振涛北京航天自动控制研究所文摘本文分析7系统状态转移矩阵及函数矩阵L的性质.给出7新的彼此转换关系推导了系统的输入信号响应函数,及积分响应函数的表达式,说明7它们的计算方法.主题词线性系统状态方程转移矩阵响应引言有一个系统:A(t)X+F(X,X.,u),初值00)=Xo(1)设(1)为Ⅳ阶连续系统,A(t)x为由右函数中分离出来的线性部分.控制信号的表达式为U=u(x,X)(2)非线性的右函数F(X,X,U)中可有与系统参数无关的强迫向量.A(t)是N×N可微连续矩阵,右函数可积,即系统(1)可解.如系统(1)可线性化(或在其离散化的一个采样区间内),则右函数必可写成下式,,)1一}(3)U(X,X)J又X=,(X)‟即右函数与系统状态无关,在采样点上即可完全确定其性质.这样的系统称线性系统,可由线性理论求解与控制.如系统(1)的右函数不可化为(3)式,则为非线性系统.通常非线性系统的X,X,U)中含有不可忽略的X的高阶项.因此把线性项A(t)X分离出来,一般不带来求解与控制的方便性,也就是仍可把A(t)X部分并人右函数F(X,X,∽之中.即令系统(1)中之A(t)为零矩阵.,这样,系统方程(1)即表示了一个一般的连续系统.线性系统时,它满足(3)式;非线性系统时令A(t)=0.注:黑体为矩阵~8~{●●■●●一,状态转移矩阵e(t,c)及LM函数矩阵1.状态转移矩阵表达式/已知线性系统的状态转移矩阵西(f,i)的表达式如下”西~M(tp,l,0主L(tp,0,m㈤且有下式存在西(f_:M(tp,l,0(5)(tp,r=可见式(4)即为dP(t,f)一dP(t,t)dP(t,f).此是状态转移矩阵的传递性e 计算参考时刻t是任选的系统定义域内的用以计算M,L函数矩阵的时刻,用M,L系数矩阵可计算出系统由t点开始”向前与”向后的状态转移矩阵,从而即可计算出任意区段(T,f)的状态转移矩阵.由此可看出西,L,M函数矩阵的如下诸性质:性质1M(t,,l,0L(t,,0,『)‟是系统状态转移矩阵西(f,,)的”向前泰勒展式与”向后泰勒展式的系数..由式(5)可看出有…l_M(t,l,0)afJ一I—p(6)l—L(tp,)afllf一,pM(t,,0)与L(f,,0,『】之间的关系可由L(f,k,,)作为中间变量表达如下: M(,,.)毛‟一)cL(t,l--k,k)t(Ip,『】:一圭c;董c:L(f,一‟,一l一),zA+j(f,)={一i9两个互逆状态转移矩阵的表达式分别可写成下式:砉:主L.川圭L.o1~-o1],o)性质2(t,t)可由二相同自变量(t~t)的幂级数表示,此二幂级数的系数M(t,1,0)与(一1)L(t,0,f)不同.性质3函数矩阵L(z,0,f)‟M(T,,,0),J|=0,1,2…组成T点的两个收敛幂级数,在此幂级数的自变量At=t—f相同时,此二幂级数互逆.显然,因(f,T)(T,)=L且T可以是系统(1)定义域内的任意时刻.2.状态转移矩阵的微分表达式由式(8)微分,有:掣dt=塞M,,∞P‟‟=.to!,m+v)dt,.=子rn[,…‟‟:主M(f,,0)ff1‟‟由于状态转移矩阵的递性,可将(:)写下式(,tp)(f,t,)(f,t,)罔而右将式(9)代人上式,一l0一(r,f).(,f):攀(dtPp:mn枷(fI{一并分别取值等于,与,时,则状态转移矩阵的微分表达式为:M)dt)dt(9一1)f9—2)(10—1)(10—21It●零(11)中的f与f可互换.[对应于式(9—2)i.性质4系统(1)的状态转移矩阵满足如下齐次方程组(共轭方程) dt:一(f,fP).A(f)…‟,‟,_A(f).,)……,(12)已知L(z,0,,)=一A(T),M(T,,,0)A(T)再考虑到式(11)即可得上式.3.函数矩阵M(t,f,0)与IXt,0,,)问的转换公式已知(f,f(T,t)=I(13)对t微分v阶,视f=t=常数.则有:dOl~(z,Oddt={.0一r….o,v>将式(9一1)代人(14),得—d【(f,f),f)]f=垂[M(z,l--m+v--i,O).L(,o,…)]一J一0…=Oi一0一,=o;(15)0.v>0.当v=0时,上式为:I=∑∑cM(f,,一,0)L(z,0,)=M,o,o)L(0,o)+∑i二;L∑CIM(~,f一卅,0)L,0,)故有:∑i∑cM(f,f一Ⅲ,o)L(f,o,Ⅲ)=o06)在v≠0时,式(15)在任意(t—T)下恒等于零.已知此幂级数收敛,由代数相关定理知,该幂级数的各阶系数恒等于零再与式(n6)比较,可知有:(下式也可由式(11)直接推出)Mcz,v--i,0L{(17i0,‟v同理可推出:Lct,O,v-i={(18In▲‟‟t可是系统(1)定义域内的任意时刻.由此可推出如下递推转换公式L(t,0,O)=M(t,0,o)=Ii(t,v,o)=一∑cM(f,v—f,O)L(t,0,f)J一1L(t,0,v)=一∑cL(f,0,v—i)M(t,i,o)(19)上式有很好的对称性..又知●…一【0)L(t,0,v)=一∑cL(f,0,v一1一)A(f)(2o)一0.用式(19),(2O)即可由系统的A(f)矩阵,直接计算出所需的L(t,0,v),M(t,v,O),并由此计算出系统(1)的状态转移矩阵.函数矩阵L(t,O,v),M(t,v,2),2≠0也是很有用的,它们分别是状态转移矩阵的某种混合偏导数.在计算积分响应函数时即要用到.M(t(f,0,0)=L(t,0,0)=I1M(t,v,)=L(t,i,v)=0,当z≠0或v≠O时J(f,t)I二,系统响应函数(27)(28)把系统(1)写成下列形式,以研究其对控制信号的响应函数.=A(f)+s(t)v,x(t0)=0(29)Y=c(t)xA(O,B(f),c(f)均为连续函数矩阵.设r维控制向量可展成时同的幂级数,如下:化成首l形式U—u敢f)u…(f—fP)“tu,.m“J(,)“fJO一,.,O—fP)‟可一Oo 0..;Ⅱ”00(30)设控制信号的第』分量的不为零的最低阶系数为”(f.).为说明方便,设各分量的首项均为i.项,且有相同的首项系数”(.).这样.)就是一个各分量相等的常向量(对实际系统不必使其各分量相等,只要使i对齐即可).设B(f)有与A()形式相同的展开形式,则B(t).us…()可写成如下展式s∽_B(:ys()(32)则常输入)的系统响应函数如下:一13一;.H(f,f0)I(f,T)s(r)出(33)nH(t,f.)的表达式可用与状态转移矩阵积分相同的方法求得将式(4)代人上式:.,害=…,~Ls(tp,m)mLs(f,,)L(f,Oj)S(,)因而有H(t,toct,tp)~Ls一)[一]系统响应函数H(f,f.)中的f.表示输入的作用起始时间.计算参考时刻f的取值不影响响应函数的值.一般令f为输入的作用端点,计算最为简单.其表达式为:当fto时当f:时(37)(38)2.脉冲响应函数当输人为=f)时,(35)与(36)即为系统的脉冲响应函数,其表达式可直接写成.14——t●●●H(t,to)中(u)Ls(,m)tn一)如系统又有B(t)=I且rN时,则脉冲响应函数为H(t,t)=e(t,T)3.其它响应函数当输人为fu(i0)≠0LU(i)=0,i≠i(39)(4O)(41)此时有::二L式(35)与(36)即为系统的f阶斜坡响应函数.f如系统的B(t)特殊,能使S(t)化为单位矩阵,则其退化为阶跃响应函数,即式(38)表示的H(t,t)可是特殊设计的B(f)的i阶斜坡响应函数(系统综合问题,此处设B(t1是可改变的网络).当系统输入有:.;l(42)U(i)0,i>iJ则式(36)表示的是系统的f次函数响应函数.如此类推,可以得到系统的输人为已知函数(3O)的各种特殊响应函数.求褥响应函数H(t,t)后,对应于各种输入的输出表达式即可写成下式: (f)e(t,tn)(fD)+H(t,to)i.)(43)三,系统的积分响应函数1.积分响应函数表达式当系统(29)的输入信号U难于表达成式(30)形式时,最好用积分响应函数来求解系统仍将系统写成式(1)形式:XA(t)X+F(t),X0(44)Y=c(t)x则系统对右函数的响应可写成s(f)=∑Q(t,f.,V)F(f)Y=n”十_J(45)rrF(f)=l,(T)~l5一Q(t,f,v)是系统右函数f)的v+l阶积分的响应函数其表达式为9)tto时Q(fIf0j):_1).掣fa中(fn,f)ttf时的计算公式最简单,(50)ft0时,Q(t,f0,V)的计算较复杂当f—fo很大时,(f.t.)可用分段计算法求得;但£的计算却遇到了麻烦方便的计算方法仍然是使用式(47),计算中选at择t值,以使|卜--不大,则计算很易实现.求得积分响应函数后,则系统解即可写为下式:f)(f,t0)0+∑Q(t,t0,V)F(f)(51)2.特殊系统的积分响应函数Q(t,t0,V)与H(f,t.)的差别是Q(f,t,v)中没有包含B(f)与等信息.故更易直接化简:一l6一4●●■当系统为定常系统时,有:Q(t,t,V)一A,Q(t,t.,0)中(f.t.)=P….故定常系统解为(f)=P卜x(to)+∑A,(f)-=0JJ当系统(1)为非线性系统时,ACt)=0故有Q(t,to,v)iv≠0orI.v=,t0)I由此推得的系统(1)的解即为一般熟知形式:x(t)=x(to)+F(t)可见连续系统,当为线性系统时,有很多可供分析使用的手段有参考文献(52)(53)(54)(55)对非线性系统却没【1]李振涛,线性时变系统的状态转移矩阵,宇航,1986年第1期,p.33 【2]李振涛,变参数线性常微分方程组的积分型级数解,宇航,1987年第2期,p.36STA TETRANSFERMA TRIXANDSYSTEMRESP0NSEFUNCT10NLiZhenta0BeijingAerospaceAutomaticControlInstitute AbshtThepaperanalysestheL.Mpropertiesofsystemstatetransfermat~‟ixa ndfunctionmatrix.Anewtransformationrelationshipbetweenthemisgiven.Theexpress ionsoff船re- sponsefunctionofsysteminputsignalandintegralresponsefunctionaredevir ed0wfandtheircomputingmethodsarealsodeseribed. SubjecttermLinersystemEquationofstateTransferMatrixResponse—l7一。
转移矩阵及其基本性质哈尔滨师范大学学年论文题目转移矩阵及其基本性质学生周林指导教师张强讲师年级 2008级专业物理学系别物理系学院物理与电子工程学院哈尔滨师范大学2011年 2 月论文提要一是随着光通信、光信息处理和光传感等技术的迅速发展,研究光在薄膜波导中调制、耦合、传输、放大、色散和非线性相互作用等现象的波导光学日益受到有关研究人员的重视。
而波导光学领域内的研究的研究成果对一系列薄膜光电子器件的发展也起到了重大作用。
而在研究导波光学中转移矩阵是不可或缺的,在导波光学中,利用转移矩阵方法研究多类波导特性已经取得了许多的创造性成果,其内容覆盖了多层薄膜导波、渐变折射率波导、周期性波导、多量子阱波导、泄漏波导、金属覆盖波导以及金属与介质界面上的表面等离子波。
由此可见,转移矩阵在导波光学中的作用是巨大的。
二是在数学和物理学的研究中,转移矩阵也是不能缺少的,利用转移矩阵的定义和转移矩阵的八个基本的性质解决了许多数学和物理学的问题。
转移矩阵及其基本性质周林摘要:利用矩阵技术描述光在多层薄膜中的传播是一种简单易行的方法。
这种方法不仅物理意义清晰、计算方便,而且具有给出解析式的潜力。
本文先介绍平板波导的波动方程以此为基础通过简单的三层平板波导来建立转移矩阵,从而导出转移矩阵的八个基本性质,在现在科学界中转移矩阵及其基本性质被广泛应用。
关键词:波动方程 TM 波 TE 波转移矩阵矩阵方程基本性质模式本征方程一、平板导波的波动方程在研究转移矩阵前我们要先知道平板导波的波动方程因为在下面的转移矩阵的推导中会用到这个方程,还可以通过推导波导方程更好的理解转移矩阵的推导过程,还有它们之间的联系和转移矩阵在导波光学中的重要作用。
假设有一个非对称平板波导的结构如图1所示,它是由三层材料组成的,中间一层是折射率为1n 导波层,它的淀基在折射率为2n 的衬底上,导波层上面是折射率为3n 的覆盖层(也称包层)。
图 1为了构成真正的光波导,所以1n 必须大于2n 和3n ,为了不失一般性,可以假设321n n n ≥>。
状态转移矩阵的判定条件
状态转移矩阵是描述状态转移系统的工具。
在控制论、自动控制和系
统工程方面有广泛的应用。
状态转移矩阵判定条件主要有以下几点:
1. 必须是有限维的
状态转移矩阵必须是有限维的,也就是说,该矩阵的列数和行数都必
须有限。
如果矩阵的列数和行数是无限的,那么其无法使用矩阵的方
式进行描述,也就无法使用状态转移矩阵进行状态转移的分析。
2. 具有可逆性
状态转移矩阵必须具有可逆性,也就是说,存在一个逆矩阵,可以将
该矩阵进行逆变换。
如果状态转移矩阵不具有可逆性,那么其无法进
行状态转移的分析和控制。
3. 矩阵必须稳定
状态转移矩阵必须是稳定的,也就是说,在进行状态转移的过程中,
系统的状态必须保持在一个有限范围内。
如果状态转移矩阵不稳定,
那么其在系统中的应用会带来很大的问题。
4. 具有一定的几何意义
状态转移矩阵具有一定的几何意义,可以被视为一个线性变换的描述。
因此,在状态转移的过程中,其所描述的变换必须满足一定的几何条件,如旋转、缩放等。
5. 满足复合定理
状态转移矩阵必须满足复合定理,也就是说,如果有两个状态转移矩阵,那么它们的复合必须仍然是一个状态转移矩阵。
如果状态转移矩
阵不满足复合定理,那么其在状态转移的过程中会造成不确定性和混乱。
总之,状态转移矩阵是描述状态转移系统的重要工具,其判定条件包括有限维、可逆性、稳定性、几何意义和复合定理等要素。
只有满足这些条件,才能进行有效的状态转移的分析和控制。
摘要:状态转移矩阵是现代控制理论的重要概念,在线性控制系统的运动分析中起着重要的作用。
分别对连续时间线性时变系统、离散时间线性定常系统以及离散时间线性时变系统的状态转移矩阵进行了研究。
根据常微分方程和差分方程解的唯一性,得到了判断矩阵函数是某一线性系统状态转移矩阵的充分条件,以及如何求出其对应的系统矩阵的方法。
状态转移矩阵是现代控制理论的重要概念,在线性控制系统的运动分析中起着重要的作用。
文献[1-8] 对线性系统的状态转移矩阵(包括连续时间线性定常系统、连续时间线性时变系统、离散时间线性定常系统、离散时间线性时变系统)进行了详细而深人的介绍。
通常情况下,判断矩阵函数是某一连续时间线性时不变系统的状态转移矩阵的充要条件会在之前的工作中给出。
本文对连续时间线性时变系统、离散时间线性定常系统、离散时间线性时变系统的状态转移矩阵进行了进一步的研究。
根据常微分方程和差分方程解的唯一性,得到了判断矩阵函数是某一线性系统状态转移矩阵的充分条件,并求出了其对应的系统矩阵。
1预备知识
考虑连续时间线性时变系统、离散时间线性定常系统和时变系统,它们的齐次状态方程分别为:
其中差分方程部分如下:
为了给出判断矩阵函数是某一线性系统状态转移矩阵的充分条件,需要用到下面的引理。
引理1状态转移矩阵是下列矩阵微分方程初值问题的解,且解是唯一的[5]:
引理2状态转移矩阵是下列矩阵差分方程初值问题的解:
引理3状态转移矩阵是下列矩阵差分方程初值问题的解:
2.1判定结果
2.2讨论
定理1 ~3给出了判定矩阵函数是某一线性系统状态转移矩阵的充分条件,也给出了计算其对应的系统矩阵的公式。
由状态转移矩阵的性质可知对连续系统,定理1的条件也是必要的;但对于离散系统,由于状态转移矩阵不能保证必为非奇异[2],所以定理2和定理3的条件不是必要的。
但对于连续时间线性系统的时间离散化系统,无论其为时不变或时变系统,状态转移矩阵必为非奇异[2],此时定理2和定理3 的条件是充分必要的。
定理1 ~3给出的条件是非常容易验证的,可使用比较流行的Matlab工具进行验证,因而这些充分条件是有效的。
3结束语
本文对线性系统的状态转移矩阵进行了进一步的讨论,针对连续时间线性时变系统、离散时间线性定常系统和离散时间线性时变系统,分别给出了函数矩阵是某一线性系统状态转移矩阵的充分条件。
这些条件是非常容易验证的,因而是有效的,并通过例子说明了结论的正确性。
参考文献
[1 ]王高雄,周之铭,朱思铭,等.常徽分方程[M].2版.北京:高等《自动化仪表》
[2] 郑大钟.线性系统理论[M].2版.北京:清华大学出版社,2002.
[3] 刘豹,唐万生.现代控制理论[M].2版.北京:机械工业出版社,
2005.
[4] 施颂椒,陈学中,杜秀华.现代控制理论基础[M].北京:高等教育出版社,2007.
[5] 王孝武.现代控制理论基础[M].2版.北京:机械工业出版社,
2006.
[6] 白素英四种计算方法的比较[J].数学的实践与认识,2008 , 38(2) :156-158.
[7] 徐进.常系数齐次线性微分方程组基解矩阵的求解[J].江汉大学学报:自然科学版,2005,33(4): 17-19.
[8] 黄承绪.矩阵指数函数的一些性质[J].武汉理工大学学报:交通科学与工程版,2001,25(2) ;147 -149.。