船舶电力推进
- 格式:ppt
- 大小:5.38 MB
- 文档页数:57
船舶电力推进系统船舶电力推进系统是现代船舶设计中的重要部分,它的作用是为船舶提供高效、可靠的动力,以满足船舶的各种需求。
本文将详细介绍船舶电力推进系统的构成、特点、应用场景及其发展趋势。
一、系统构成船舶电力推进系统主要由发电机、变压器、配电板、变频器、推进器等组成。
其中,发电机负责将机械能转化为电能,变压器则将发电机输出的电压和电流进行调节,配电板负责对电能进行分配和控制,变频器则将电源频率转换为推进器所需的频率,推进器则最终将电能转化为机械能,推动船舶前行。
二、系统特点船舶电力推进系统具有以下优点:1、能量利用率高:电力推进系统中的电动机能量转换效率高达90%以上,相比传统燃油发动机,能量利用率更高。
2、航行平稳:由于电力推进系统可以通过调节电动机的转速和转向来控制推进器,因此可以实现船舶的平稳航行,减少震动和噪音。
3、维护方便:电力推进系统的机械部件相对较少,因此维护相对简单,寿命也更长。
4、环保:由于电力推进系统使用的燃料是电力,因此不会产生废气和噪音,对环境更加友好。
三、应用场景电力推进系统在船舶中的应用非常广泛,尤其是在大型船舶、高速船和军舰中,电力推进系统的优势更加明显。
例如,在大型油轮中,电力推进系统可以更好地满足油轮的平稳航行和货物运输需求;在高速船中,电力推进系统可以实现更高的航速和更好的舒适性;在军舰中,电力推进系统可以提高舰船的隐蔽性和作战能力。
四、发展趋势随着科技的不断进步,船舶电力推进系统也在不断发展。
未来,电力推进系统将更加智能化、高效化和环保化。
具体来说,以下是一些发展趋势:1、智能控制:未来的电力推进系统将更加智能化,可以通过传感器和人工智能技术实现自动化控制和优化,提高系统的效率和可靠性。
2、高效能源:未来的电力推进系统将更加注重能源的高效利用,例如采用更高效的发电机和电动机,以及更先进的能量储存技术,以提高系统的能量利用率。
3、环保技术:未来的电力推进系统将更加注重环保,例如采用更环保的燃料电池或太阳能等可再生能源技术,以减少对环境的影响。
船舶电力推进技术
船舶电力推进技术是指使用电力驱动船舶推进系统的技术。
相比于传统的机械推进技术,电力推进技术具有更高的效率、更低的噪音和更少的污染排放,因此在现代船舶设计中得到了越来越广泛的应用。
船舶电力推进系统通常由以下几个部分组成:
1. 发电机:将机械能转换成电能,产生所需的电力。
2. 电动机:将电能转换成机械能,驱动船舶的螺旋桨旋转,产生推进力。
3. 电池组:作为备用电源,提供紧急电力供应或在需要时提供额外的电力。
4. 控制系统:负责监测和调节电力系统的运行,确保系统的稳定和安全。
船舶电力推进技术的优点包括:
1. 高效节能:电力推进系统可以实现高效节能,降低船舶的燃料消耗和排放。
2. 噪音低:电力推进系统的运转噪音较低,减少了对周围环境的噪音污染。
3. 灵活性高:电力推进系统可以根据需要调节输出功率,提高船舶的操纵灵活性。
4. 维护方便:电力推进系统的维护相对简单,可以减少
船舶的维护成本和停机时间。
船舶电力推进技术的缺点包括:
1. 初始成本高:电力推进系统的建设成本相对较高,需要投入大量资金。
2. 技术要求高:电力推进系统的设计和维护需要具备较高的技术水平。
3. 受电网限制:电力推进系统的运行需要依赖电网供电,受到电网供电的限制。
船舶直流组网电力推进技术发展优势报告随着船舶行业的发展,船舶电力推进技术也不断得到了改进和优化。
其中,船舶直流组网电力推进技术是当前较为先进的一种技术。
本文主要介绍船舶直流组网电力推进技术的发展优势。
一、提高船舶效率采用船舶直流组网电力推进技术可以有效提高船舶的效率。
相比于传统的交流电系统,直流电系统具有更高的电能转化效率和更低的能量损耗。
在船舶的电力供应和储存方面,直流电池和充电器具有更高的充电效率和更长的电池寿命,从而使得船舶运行更加高效。
二、提升船舶的可靠性在传统的交流电系统中,一旦发生短路或电路故障,整个电力系统就可能会瘫痪。
而直流电系统则可以更加灵活地应对这些故障,因为故障发生后只会影响到一个或几个电池单元,而不会影响到整个电力系统。
这种特性可以提高船舶的可靠性和安全性,从而降低船舶的维修成本和运营风险。
三、降低船舶的碳排放船舶是主要的碳排放来源之一。
采用船舶直流组网电力推进技术可以减少碳排放,因为直流电池和充电器所需的电源可以来自可再生能源,例如太阳能和风能。
此外,使用直流电推进系统可以减少能源的浪费,从而降低船舶的碳排放。
四、支持智能化船舶随着智能化技术的快速发展,越来越多的船舶需要智能化技术的支持。
船舶直流组网电力推进技术可以为智能化船舶提供更好的平台,因为它可以与各种智能化方案集成,如远程监控、自主导航、自动调节和自适应控制等。
这些功能帮助船舶更好地适应未来的智能化趋势,提高生产效率并减少人为干扰。
综上所述,船舶直流组网电力推进技术具有很多优势,在提高船舶效率、提升可靠性、降低碳排放、支持智能化船舶等方面都有显着表现。
这种技术的进步将使船舶更加清洁、高效和安全。
船舶直流组网电力推进技术的发展不仅在理论计算和实验室观测方面有所突破,在实际应用中也取得了不俗表现。
以下将选取相关数据进行分析。
一、直流电系统的效率比交流电系统高5-10%直流电系统具有更高的电能转化效率和更低的能量损耗,这也是船舶直流组网电力推进技术优势之一。
舰船电⼒推进技术的发展现状电⼒推进是指由舰船的原动机(柴油机或燃⽓轮机或两者混合,甚⾄核动⼒装置)驱动发电机产⽣电能,再由电动机将电能转换为机械能驱动推进器实现舰船机动的⼀种推进⽅式。
⼀艘电⼒推进船舶,不管采⽤何种⽅式发电,电⼒不是像传统布置⼀样直接与驱动装置相连,但可为全船提供电⼒,这种⽅式能提供更⼤的供电灵活性、⾼效性和⽣存性。
舰船步⼊全电⼒时代就像当初从帆船时代步⼊蒸汽时代⼀样,是⼀个巨⼤的跨越。
⼀电⼒推进的优缺点1 电⼒推进的优点1)可以灵活布置船上⼤型机械设备;2)便于操控和航⾏;3)可降低运⾏噪声。
因为没有齿轮箱等⼤功率后传动机械装置和长轴系,明显降低了舰艇运⾏噪声,提⾼了乘员的舒适度,且提⾼了舰船的隐⾝性;4)如果电动机设计成低速(100~200 r/min)运⾏,并直接与推进轴连接,则可省去减速齿轮;5)与常规的机械推进⽐较,电⼒推进的重量和体积⼤⼤减少;6)电⼒推进系统能效更⾼;7)电⼒由冗余电缆传输,可靠性⾼,并可减少维护;8)节能环保。
所有原动机均以恒定速度运⾏于最佳⼯作状态,并可根据负载变化动态调整,明显降低能耗和排放;9)全电⼒舰船所需的舰员⼈数会⼤幅减少,进⼀步减少使⽤成本。
10)可使舰船成为电磁武器的搭载平台。
⼤型舰船变频调速电⼒推进在功率等级上与电磁武器基本相当,随着这种新型电⼒推进技术的⼯程化应⽤,将在电能管理和脉冲式电源变换等重⼤技术上为⼤功率雷达、电磁炮、电磁弹射等新装备装舰扫清障碍。
2 电⼒推进系统相对常规推进装置的不⾜之处1)电⼒推进系统的价格较传统推进装置更为昂贵,因⽽船舶建造的初投资将会增加;2)在原动机与螺旋桨之间增加的电器设备,如发电机、变压器、变频器和电动机等,加⼤了船舶全动⼒运⾏时的传输损耗;3)⼤量采⽤电⽓设备可能引起⼀些危害,如⽕灾和电⽹的谐波⼲扰等;4)由于船舶安装了多种新型设备,需要制定不同的运⾏、⼈员配备及维护策略,提⾼了对操作⼈员和维护⼈员的要求。
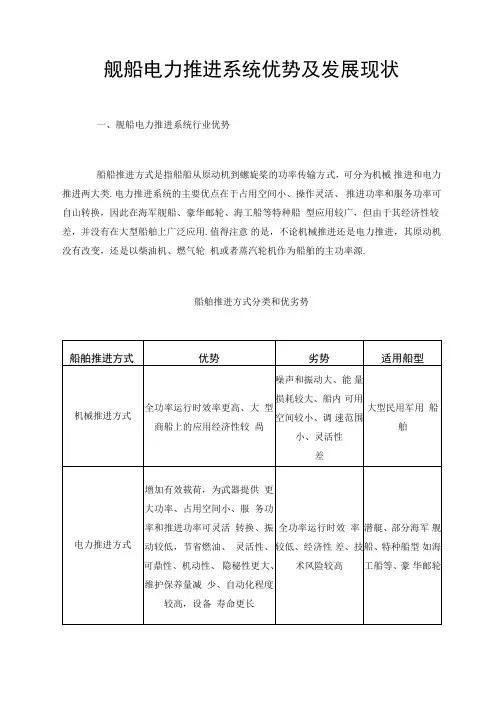
舰船电力推进系统优势及发展现状一、舰船电力推进系统行业优势船船推进方式是指船船从原动机到螺旋桨的功率传输方式,可分为机械推进和电力推进两大类.电力推进系统的主要优点在于占用空间小、操作灵活、推进功率和服务功率可自山转换,因此在海军舰船、豪华邮轮、海工船等特种船型应用较广,但由于其经济性较差,并没有在大型船舶上广泛应用.值得注意的是,不论机械推进还是电力推进,其原动机没有改变,还是以柴油机、燃气轮机或者蒸汽轮机作为船舶的主功率源.船舶推进方式分类和优劣势电力推进根据不同维度可分为多种类型.根据电力推进占比可分为混合电力推进和全电力推进,根据电动机的布局位置可分为吊舱式和非吊舱式,根据推进负载与非推进负载的电力管理和分配方式可分为综合电力推进等.电力推进方式分类由于电力推进技术具备明显优势,广泛适用于各类军船,也适用于各种大型客轮(豪华邮轮、渡轮)、特殊货轮(特别是LNG船、化学品船等)、海洋工程船(破冰船、铺缆船、挖泥船、测量船等)、海洋石油、天然气开采装备以及油气运输船等.对于民船和军船而言,电力推进技术的共同优越性有十点:1)增加有效载荷;2)降低振动;3)提高灵活性;4)增强可靠性;5)提高机动性; 6)减少维护保养量;7)节省燃油;8)提高自动化程度;9)延长设备寿命;10)技术升级.电力推进技术的主要优势U前电力推进方式中最有发展前景的是综合电力推进系统,综合电力推进系统所需功率范围为50-100W,主要系统包括供电系统、推进系统和监控系统三个分系统,主要的装置包括原动机,发电机,推进功率分配系统,推进电动机驱动装置,推进电动机,螺旋桨,非推进功率分配系统.从价值量来看,不含原动机的船舶价值量约为全船的15%左右,整套系统套价值量在千万到亿不等.综合电推系统的主要子系统舰船采用综合电力推进系统能够降低燃料消耗、节省舰船运行成本.舰船采用综合电力推进系统能够降低燃料消耗、节省舰船运行成本.在舰船的不同工作模式下,仅当舰船发动机接近满功率运行时采用机械推进的效率稍高,其余模式下采用电力推进的效率均高于机械推进.不同推进方式的推进效率比较不同推进方式的推进效率比较与乩大村堆切準比值<*)隈血极电力加遗g"幼枫》枫从曲it二、舰船电力推进系统发展现状民品领域,电力推进应用率逐步提高,整个市场呈扩张趋势.从2010-2019年完工船舶各类推进方式占比来看,采用电力推进的完工船舶占比从2010年的3. 74%上升到2019年的4.96%,其中,2017、2018年船舶电力推进占比均超过7%, 2019年有所下降主要因为整体船舶市场处于低谷,特别是油价持续低迷,海工船船等主要应用电力推进船型订单量较少.采用电力混合推进方式的船舶占比也有较大提升,从2010年的0. 33%提高到2019年的0. 73%.2010-2019年完工船舶各类推进方式占比2010-2019年2010-2019年采用电力推进和混合艘数100.00% 90.00% 80.00% 70.00% 60.00% 50.00% 40.00% 30.00% 20.00% 10.00%2010-201^年采川电力推进和混合艘数■全电0.00%从应用船型来看,船船电力推进系统主要应用的船型为海工船、特殊船型和豪华邮轮• 111于造价较高、全功率效率较低等原因,电力推进系统在油船、散货船、集装箱船这三大主流船型应用较少,但山于其突出的操作性优势,故在海工船、特殊船型和豪华邮轮等船舶上应用率极高.从具体船型来看,2019年完丄的海工船中钻井船、地震探测船、科考船、R0V潜水支持船等船型100%都是采用了电力推进系统,在其他的海工船型中应用占比也基本达到50%以上;在特殊船型中,LNG再气化船、燃料船等船型100% 采用了电力推进系统,LNG船舶中电力推进系统占比也达到了67%;豪华邮轮是另一个电力推进系统应用的主要船型,2019年完工的豪华邮轮中,电力推进系统占比达到了85. 7%.2019年完工船舶中电力推进系统主要应用船型2010-2019年完工豪华邮轮数量(艘)2010-2019年完工g华邮轮数応(艘〉2010-2019年完工豪华邮轮推进方式占比2010-2019年完工豪华邮轮推进方式占比■全电推进•小型鏗轮(2万吨以下)■全电推进冲型蜉轮(2-5万吨)全电推进•大型哒(5~7万吨)■全电推迸•巨型密轮(7万从建造国家来看,欧洲完工的船舶采用电力推进的比例较高.一方面山于欧洲生产的船型主要为豪华邮轮、海工船以及特殊船型,这些船型较为适合应用电力推进系统,另一方面也因为全球主要的电力推进系统生产厂商均在欧洲,技术和产业链较为成熟.2019年中国完工的船舶电力推进占比仅为3. 94%,但从绝对量来讲,由于基数较大,中国完丄的电力推进船舶数量全球最高,占全球完工电力推进船舶的23. 36%.2019年中国完工船舶中电力推进船舶数量及占比2019年中国完工船舶中电力推进船船数量及占比2010 2011 2012 20132014 2015 2016 2017 2018 20192019年各国完工电力推进船舶占比2019年各国完工电力推进船舶占比■中国■挪威■韩国■意坤■韩国■具他从完工船型来看,中国完工船舶中采用电力推进的主要为海工船和特殊船型.2019年中国完工的海工船中有25艘采用了电力推进方式,特殊船型中有19艘采用了电力推进方式,3艘采用了混合动力推进方式.2019年中国完工船舶电力推进船型船型分类具体船型电力推进混合动力推进机械推进总计电力及混合动力占比海工船三用工作船1—7812. 50%潜水支持船2—2450. 00%12%中国2049年询将建造10艘航母,LI前中国已造航母型号为002,后续2020-2049年将建造8艘航母,若对标美航母作战群水面舰艇价格,则造价为2592亿美元,平均每年129.6亿美元对应900. 72亿人民币(按照6. 93中美汇率计算).按照20%船舶动力系统造价占比计算,则未来中国航母作战群军用舰船动力系统总采购规模约为180. 14亿元,若中国也建造非航母作战配套舰艇,则此为军用电力综合推进系统采购额的保守估计.未来中国航母作战群军用舰船综合电力推进系统投入预佔未来市场空间方面,军品方面,预计未来十年军船市场电力推进市场空间为31.35亿美元,约合人民币220亿元。
船舶电力推进技术简述摘要:电力推进作为船舶的新型推进动力,世界各国都在进行深入的研究。
本文简要介绍了船舶电力推进装置的基本组成、船舶电力推进技术的优缺点以及发展趋势。
关键词船舶电力推进展望1概述自1833年第一艘电动实验船诞生到现在,电力推进系统的发展已经有170多年的历史。
二战期间,电力推进曾出现过一段流行期,由于当时交流电机调速技术不成熟,多采用直流电力推进,其调速系统简单、调速性能好。
但由于直流电机结构复杂、体积及重量大,并存在功率及转速极限等问题,故只能用在一些工程船舶及潜艇上,使得电力雏进在整个船舶推进领域中的发展受到限制。
20世纪80年代以来,随着电力电子技术迅速发展,大功率交流电机变频调速技术日益成熟,同时,为了迎合各国对船舶性能要求的进一步提高,船舶电力推进技术在国内外得以迅速发展。
近年来,综合全电力推进系统使得电力推进船舶在军事舰艇上得到了深入的研究。
实现了电力和动力两大系统的全面融合。
目前,电力推进越来越广泛的使用在潜艇、起重船、破冰船、挖泥船、消防船、滚装船、领航船、航标工作、船渡船、豪华游船以及军事舰艇上。
2船舶电力推进装置基本组成目前世界上使用电力推进的船舶,主要可分为两类:一类是电力推进与其他发动机推进结合的混合推进,例如英国23型护卫舰;另一类是全电力推进,即使用一个电站供电给推进装置和其他辅助装置,例如美国DD21水面舰艇。
船舶电力推进装置一般由原动机、发电机、电动机、螺旋桨以及控制单元组成。
原动机带动发电机,发电机带动推进电机,电机驱动螺旋桨,推动船舶航行。
因螺旋桨所需功率很大,一般需要设置两个单独的电站:推进电机电站和辅机电站,分别给推进电机和辅机供电。
目前的原动机一般使用高速或中高速的柴油机,推进装置一般有直流电力推进和交流电力推进两种。
3船舶电力推进技术优缺点3.1船舶电力推进技术具有的主要优点(1)可获得所需要的推进电机机械特性,以满足不同航行工况的要求,这对主机以及船舶的经济性有利。
2024年舰船综合电力推进系统市场前景分析概述舰船综合电力推进系统是通过综合利用舰船上的各种能源,将其转化为电能驱动舰船前进的系统。
该系统综合利用了传统的燃油动力和电力驱动技术,能够提高舰船的燃油利用效率,降低对环境的影响,提高舰船的推进效率和灵活性。
本文将对舰船综合电力推进系统的市场前景进行分析。
市场需求舰船综合电力推进系统市场前景广阔,主要受以下几个因素驱动:1.节能环保需求:随着全球环保意识的增强,舰船综合电力推进系统的节能环保特性受到越来越多的重视。
该系统能够有效降低舰船的燃油消耗和排放量,符合节能减排的政策要求,受到许多国家和地区政府的支持和推广。
2.舰船性能要求:舰船综合电力推进系统通过提供更高的动力输出和灵活性,能够满足舰船在极端条件下的特殊需求,如战斗任务、巡航速度、航行稳定性等。
在提高舰船性能的需求推动下,舰船综合电力推进系统的市场前景广阔。
3.研发和创新推动:舰船综合电力推进系统技术的研发和创新不断推动舰船推进系统市场的发展。
新型材料、高效能源转化等技术的突破,为舰船综合电力推进系统的应用提供了更多可能性和机会。
市场发展趋势舰船综合电力推进系统市场正呈现出以下几个发展趋势:1.技术升级和创新:随着科技的不断进步,舰船综合电力推进系统的技术也在不断升级和创新。
例如,采用高效能源转化技术、智能控制系统等新技术,提高系统的效能和性能,满足舰船不断增长的需求。
2.产品多样化:舰船综合电力推进系统的市场上,产品逐渐呈现多样化的趋势。
从传统的柴油发电机驱动系统到新型的氢燃料电池驱动系统,不同的舰船综合电力推进系统为用户提供了更多选择,满足不同舰船的需求。
3.国际合作加强:在舰船综合电力推进系统市场竞争日益激烈的情况下,国际合作成为一种趋势。
各国船舶制造企业进行技术合作、联合研发,共同提高船舶推进系统的技术水平和竞争力,共同开拓市场。
市场前景分析舰船综合电力推进系统市场具有广阔的前景:1.2020年以来,世界各国对绿色环保的关注度持续提高,不断推动舰船综合电力推进系统市场的发展。
船舶电力推进系统的发展船舶电力推进系统已有近百年历史,但是由于受各种因素制约,发展缓慢,且大多数只应用在特种船舶上。
从20世纪80年代起,供电系统、推进电机和微电子及信息技术的迅猛发展,使船舶电力推进装置打破了长期徘徊局面,得到了大力的发展。
电力推进系统基本由机械原动机(柴油机、燃气轮机或核动力)构成,用以驱动交流发电机,发电机再为推进电动机提供动力。
电动机可能是直流、交流同步电动机或交流感应电动机。
同传统的机械推进方式相比,采用电力推进系统的船舶在经济性、振动噪声、船舶操纵、布置和安全可靠性等方面具有明显优点。
船舶综合全电力推进系统包括:发电、输电、配电、变电、拖动、推进、储能、监控和电力管理,是现行船舶平台的电力和动力两大系统发展的综合;它不是电力推进加自动电站的简单组合,而是从概念到方案、组成、配置、技术等均发生重大变化,给未来的船舶带来一场革命。
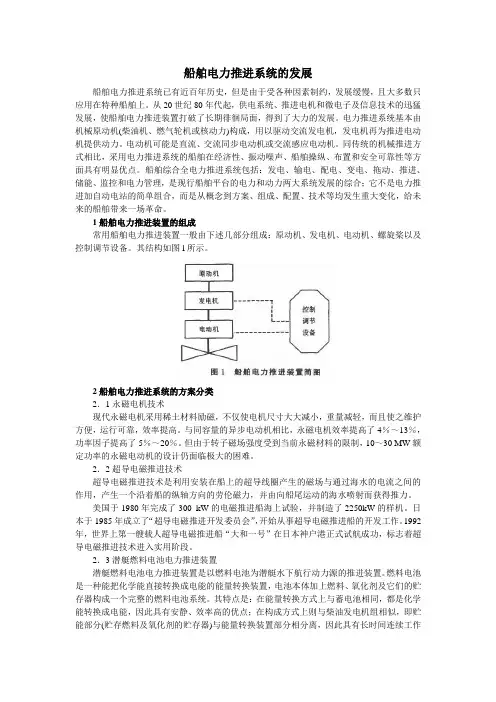
1船舶电力推进装置的组成常用船舶电力推进装置一般由下述几部分组成:原动机、发电机、电动机、螺旋桨以及控制调节设备。
其结构如图l所示。
2船舶电力推进系统的方案分类2.1永磁电机技术现代永磁电机采用稀土材料励磁,不仅使电机尺寸大大减小,重量减轻,而且使之维护方便,运行可靠,效率提高。
与同容量的异步电动机相比,永磁电机效率提高了4%~13%,功率因子提高了5%~20%。
但由于转子磁场强度受到当前永磁材料的限制,10~30 MW额定功率的永磁电动机的设计仍面临极大的困难。
2.2超导电磁推进技术超导电磁推进技术是利用安装在船上的超导线圈产生的磁场与通过海水的电流之间的作用,产生一个沿着船的纵轴方向的劳伦磁力,并由向船尾运动的海水喷射而获得推力。
美国于1980年完成了300 kW的电磁推进船海上试验,并制造了2250kW的样机。
日本于1985年成立了“超导电磁推进开发委员会”,开始从事超导电磁推进船的开发工作。
1992年,世界上第一艘载人超导电磁推进船“大和一号”在日本神户港正式试航成功,标志着超导电磁推进技术进入实用阶段。
船舶电力推进原理嗨,朋友!你有没有想过,那些在大海上航行的巨轮是怎么动起来的呢?今天呀,我就来给你讲讲船舶电力推进这个超酷的东西。
先来说说传统的船舶推进方式吧。
就像我们人走路,靠脚一步一步地往前迈,传统船舶大多靠的是柴油机或者蒸汽轮机带动螺旋桨来推动船前进。
这种方式就像是一个大力士,靠着自己的力气,生硬地转动那个大螺旋桨。
可这种方式也有不少麻烦事儿呢。
比如说,机械结构复杂,维护起来那叫一个费劲,就像照顾一个脾气古怪的老古董一样,时不时就出点小毛病。
而且呀,噪音还特别大,就像一群人在你耳边不停地敲锣打鼓,在船上工作或者休息的人可就遭罪喽。
那这时候,船舶电力推进就闪亮登场啦。
想象一下,船舶电力推进就像是一个超级智能的魔法系统。
它主要由电源、推进电机、螺旋桨还有控制系统这几个部分组成。
这电源就好比是整个系统的能量心脏。
它可以是发电机组,也可以是蓄电池。
就像我们人要吃饭才能有力气干活一样,这个电源为整个推进系统提供源源不断的电能。
再看看这个推进电机,哇塞,它可是这个魔法系统里的大力神呢!电能传到推进电机这儿,电机就像被施了魔法一样,快速地转动起来。
这电机的转速可以根据船舶的航行需求灵活调整,就像我们开车换挡一样方便。
而且呀,电机转动带动螺旋桨旋转,推动船舶前进的过程非常顺畅,就像滑冰运动员在冰面上滑行一样,没有那种磕磕绊绊的感觉。
还有那个控制系统,简直就是这个魔法系统的大脑。
操作人员就像魔法师一样,通过这个控制系统对整个电力推进系统进行指挥。
比如说,当船舶需要加速的时候,操作人员在控制系统上操作一下,就像魔法师挥动魔法棒一样,电源就会提供更多的电能给推进电机,电机转得更快,螺旋桨也就转得更快,船就“嗖”的一下加速啦。
我有个朋友是船员,他跟我讲过他在电力推进船舶上的经历呢。
他说:“以前在传统推进的船上,那机器的轰鸣声吵得我晚上都睡不好觉。
现在可好喽,在这电力推进的船上,安静得很呢。
就像从嘈杂的菜市场一下子来到了安静的图书馆。
舰船电力推进系统优势和新能源舰船电力推进系统的优势主要包括以下几点:1. 环保节能:舰船电力推进系统可以采用新能源作为能源输入,例如太阳能、风能、核能等,相比传统的燃油推进系统更加环保,减少了对大气和水域的污染。
同时,电力推进系统的效率更高,能够更好地利用能源,实现节能目标。
2. 噪音低:相比燃油推进系统,电力推进系统的噪音更低。
燃油推进系统产生的噪音主要来自于内燃机的运转,而电力推进系统可以采用电动机等无噪音的设备,降低了舰船的噪音污染,提高了舰船的隐蔽性。
3. 可靠性高:电力推进系统由多个电动机组成,每个电动机都可以独立工作,因此具有较高的可靠性。
即使其中一个电动机出现故障,其他电动机仍然可以正常工作,确保舰船的持续运行。
4. 灵活性强:电力推进系统可以根据舰船的需求进行灵活的调节。
通过控制电动机的转速和功率输出,可以实现对舰船的速度和航行方式的灵活调整,提高舰船的机动性和操纵性。
至于新能源在舰船电力推进系统中的应用,目前主要包括以下几种:1. 太阳能:舰船可以通过安装太阳能电池板来收集太阳能,将其转化为电能供电。
太阳能电池板可以安装在舰船的甲板上,通过吸收阳光来产生电能,为舰船提供部分电力需求。
2. 风能:舰船可以利用风能进行推进。
通过安装风能发电机和风帆等设备,将风能转化为电能或直接推动舰船,实现舰船的推进。
3. 核能:核能是一种高效且稳定的能源,可以为舰船提供持续的电力供应。
核能发电系统可以通过核反应堆产生热能,再将热能转化为电能,为舰船提供动力。
4. 其他新能源:除了太阳能、风能和核能,舰船还可以利用其他新能源如地热能、潮汐能等进行推进。
这些新能源的应用可以减少对传统能源的依赖,提高舰船的能源利用效率和环境友好性。
舰船电力推进系统优势和新能源舰船电力推进系统的优势主要包括以下几个方面:1. 环保节能:舰船电力推进系统采用电力作为动力源,相比传统的燃油推进系统,能够减少燃油的使用量,降低碳排放和空气污染,对环境更加友好。
2. 高效稳定:舰船电力推进系统具备高效稳定的特点,电动机的功率输出可以根据需求进行调整,能够实现快速启动和停止,提高舰船的操控性能。
3. 低噪音和振动:相比传统的内燃机推进系统,电力推进系统噪音和振动更低,能够提供更加安静和舒适的工作环境,有利于舰员的工作和休息。
4. 灵活性和可靠性:舰船电力推进系统可以根据需要进行灵活配置,可以采用多台电动机进行推进,提高系统的可靠性和冗余性,同时也有利于舰船的机动性能。
5. 整合新能源:舰船电力推进系统可以与新能源技术相结合,如太阳能、风能等,通过利用可再生能源来供电,进一步减少对传统能源的依赖,提高能源利用效率。
新能源在舰船电力推进系统中的应用主要包括以下几个方面:1. 太阳能:舰船上的太阳能电池板可以将太阳能转化为电能,为舰船提供部分电力需求,如照明、通信等。
此外,太阳能还可以用于充电设备,如电动舰艇的电池组。
2. 风能:舰船上的风力发电机可以利用风能产生电能,为舰船提供部分电力需求。
风能可以通过舰船上的风帆或风轮来捕捉,转化为机械能,再经过发电机转化为电能。
3. 潮汐能:舰船可以利用潮汐能发电,通过潮水的涨落来驱动发电机,产生电能。
潮汐能是一种可再生能源,可以提供稳定的电力供应。
4. 氢能:舰船可以利用氢能作为燃料,通过燃料电池将氢气与氧气反应产生电能,为舰船提供动力。
氢能是一种清洁能源,只产生水蒸气作为副产品,对环境无污染。
综上所述,舰船电力推进系统具有环保节能、高效稳定、低噪音和振动、灵活性和可靠性等优势,并可以与新能源技术相结合,实现对可再生能源的利用,从而进一步提高舰船的能源利用效率。
船舶电力推进技术概况船舶电力推进系统代表着当今船舶动力的发展方向。
传统的船舶推进方式是利用原动机直接推进,而船舶电力推进则由原动机带动发电机发电,经变频器把满足要求的电流送到推进电动机,从而驱动螺旋桨的推进方式。
跟传统的机械推进方式相比,采用电力推进系统的船舶在经济性、振动噪声、船舶操纵、布置和安全可靠性等方面具有明显优点。
1.电力推进的特点以柴油机和汽轮机为主的传统型船舶,发动机占据空间过大、工作环境差、振动大、噪声高、油污多、废气排放影响空气质量。
另外由于主机大而高,系统复杂,增加维护难度,加重维护工作量(轮机人员往往占船员的30%-45%)。
[4]船舶采用电力推进系统后,提高了柴油机效率约10%-15%,节约了维修保养费,显著提高船体空间利用率,同时船型优化,提供了安静的推进方式,并且通过柴油机在大于40%的负载匀速运转来减少了NOx和SOx的排放[4]。
除此之外,电力推进系统还将提高船舶的机动性、可靠性和电站的可利用率。
1.1 电力推进船相对于机械推进船的主要优势在于:⑴机动性能好。
由于电动机的控制性能优于传统的热力机械,电力推进船舶的机动性能较好,还具有紧急停车时滑行距离短、小角度回转和快速响应等优点。
⑵机舱小、布置灵活,可增加船舶的载货载客能力。
电力推进系统减少了尾轴、舵、传动装置以及热力系统所需要的大量辅机,节省了舱容。
⑶推进效率高。
由于吊舱式结构省去了舵,所以与传统的定距浆(特别是大功率船舶用双桨时)相比推进效率提高了6%-10%。
最近ABB和韩国三星船厂曾对一万箱的集装箱船舶进行了技术和经济论证,其结论是“对于电力推进船而言,推进效率与舱容的增加已抵消电力推挤装置初投资的增加和二次换能损耗”。
[5]⑷节能、环保。
减少各种燃油、滑油的消耗;减少废气排放和震动噪声污染。
⑸适合于特种船舶的应用。
如战舰、移动式平台、破冰船等。
这些船舶航行时一般不使用其他大功率的电力设备,若使用,则不航行,电站就获得了很高的使用率。
船舶电力推进技术概况文档1. 引言随着全球经济的快速发展,海洋运输业的重要性越来越凸显,而船舶推进技术作为海洋运输业中的关键领域,更是倍受关注。
电力推进技术作为目前海洋运输业中较为可行的推进技术之一,越来越受到业内外的关注。
本文将对船舶电力推进技术作一概括性的介绍和解析。
2. 船舶电力推进技术的基本原理船舶电力推进技术的基本原理是利用船舶上的内燃机等传统动力装置用于驱动发电机,通过电源电动机的转动产生动力,从而实现船舶的移动。
这里的电源电动机将能源转换为机械能,进而推动船舶前行。
同时,船舶电力推进技术还可以通过连接多个电机来实现船舶的多点推进,从而增强船舶的推进效率。
3. 船舶电力推进技术的优缺点3.1 优点船舶电力推进技术相较于传统的直接驱动船舶动力源来说,具有很多优点。
首先,电力推进技术具有无污染性。
因为它不需要燃料的直接爆燃来驱动船舶,所以相较于传统的船舶推进方式更加环保。
其次,电力推进技术的操作更加省力。
因为电力推进技术需要的只是电动机的控制,基本上可以实现自动化操作,更加简单方便。
最重要的是,电力推进技术能更好地满足不同地区和不同尺寸的船舶的推进需求。
因为船舶推进技术的基本原理是引擎和推进器的直接混合推力,所以不同的船舶需要的推进力量也不同,而这正是船舶电力推进技术的优势所在。
3.2 缺点船舶电力推进技术相较于传统船舶推进技术也存在一定的不足。
首先,电力推进技术需要高昂的建造成本和更大的电池储存容量。
如果船舶的尺寸更小,往往会需要更高的电池储存容量,进而带来更大的建造成本。
其次,这种电力推进技术在一些航行环境下会受到比传统推进技术更严重的影响。
比如在船舶冰区的环境下,电力推进技术的效率会因为冰的干扰而出现下降,从而影响船舶的推进速度和推进能力。
4. 船舶电力推进技术的应用现状目前,世界上许多船舶制造厂商和船东都已经开始采用电力推进技术。
部分欧洲和北美地区的航运企业的大型船只,如货轮、客轮等,均已采用电力推进技术,以减少对环境的影响并提高航行效率。