第十章_控制器的组成
- 格式:pdf
- 大小:331.17 KB
- 文档页数:20

国家精品课程/ 国家精品资源共享课程/ 国家级精品教材国家级十一(二)五规划教材/ 教育部自动化专业教学指导委员会牵头规划系列教材控制系统仿真与CAD第十章智能控制器设计方法自抗扰控制Auto Disturbances Rejection Control主讲:薛定宇教授自抗扰控制自抗扰控制199x年有韩京清研究员提出的控制策略 控制器设计时无需受控对象模型的参数 有三个组成部分微分跟踪器扩张状态观测器自抗扰控制器微分跟踪器 数学模型S-函数(状态方程)的实现 S-函数入口语句S-函数的基本框架扩张的状态观测器 数学模型其中扩张状态观测器的S-函数实现选择参数,设计状态观测器主函数 输入输出路数、连续离散状态变量个数扩张状态观测器支持函数自抗扰控制器数学模型其中方程没有连续、离散状态输入信号为m(t)=[v(t), v2(t), z1(t), z2(t), z3(t)]1输出信号为u(t)自抗扰控制器S-函数实现 主函数支持函数 输入信号为 m (t )=[v 1(t ), v 2(t ), z 1(t ), z 2(t ), z 3(t )]输出信号为 u (t )例10-4自抗扰控制器仿真 时变受控对象模型搭建仿真框图 ex_han2.slx控制器参数仿真模型 受控对象ADRC控制器模块封装 自抗扰控制器内部结构自抗扰控制器仿真 新的系统框图控制器参数选择自抗扰控制设计小结 自抗扰控制的三个组成部分 微分跟踪器扩张的状态观测器自抗扰控制器数学模型与S-函数实现自抗扰控制系统的仿真与设计。
第十章自校正控制(一)10.1 概述自校正控制系统是用电子数字计算机来实现的。
它的一个主要特点是具有对象数学模型的在线辩识环节。
在每个控制周期,计算机首先对被控对象进行辩识,然后根据辩识得到的模型参数和事先指定的性能指标,在线综合出控制作用。
因此自校正控制系统是一种把参数的在线辩识与控制器的在线设计有机结合在一起的控制系统。
通常这类控制系统在设计辩识算法和控制算法时考虑了随机干扰的影响,因此属于随机自适应控制系统。
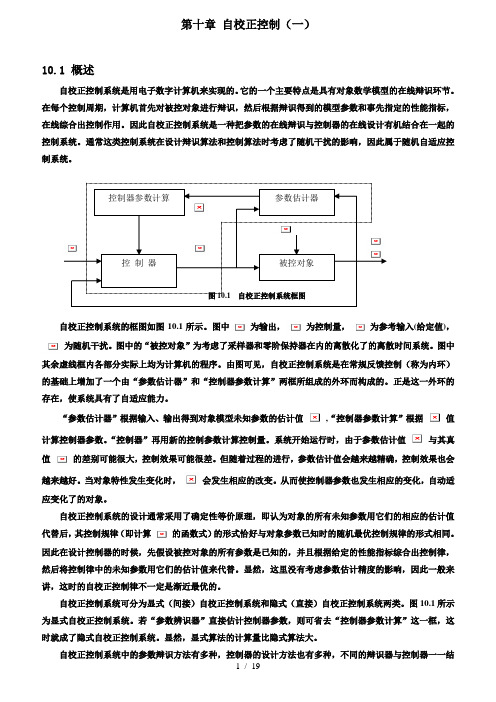
图10.1 自校正控制系统框图自校正控制系统的框图如图10.1所示。
图中为输出,为控制量,为参考输入(给定值),为随机干扰。
图中的“被控对象”为考虑了采样器和零阶保持器在内的离散化了的离散时间系统。
图中其余虚线框内各部分实际上均为计算机的程序。
由图可见,自校正控制系统是在常规反馈控制(称为内环)的基础上增加了一个由“参数估计器”和“控制器参数计算”两框所组成的外环而构成的。
正是这一外环的存在,使系统具有了自适应能力。
“参数估计器”根据输入、输出得到对象模型未知参数的估计值,“控制器参数计算”根据值计算控制器参数。
“控制器”再用新的控制参数计算控制量。
系统开始运行时,由于参数估计值与其真值的差别可能很大,控制效果可能很差。
但随着过程的进行,参数估计值会越来越精确,控制效果也会越来越好。
当对象特性发生变化时,会发生相应的改变。
从而使控制器参数也发生相应的变化,自动适应变化了的对象。
自校正控制系统的设计通常采用了确定性等价原理,即认为对象的所有未知参数用它们的相应的估计值代替后,其控制规律(即计算的函数式)的形式恰好与对象参数已知时的随机最优控制规律的形式相同。
因此在设计控制器的时候,先假设被控对象的所有参数是已知的,并且根据给定的性能指标综合出控制律,然后将控制律中的未知参数用它们的估计值来代替。
显然,这里没有考虑参数估计精度的影响,因此一般来讲,这时的自校正控制律不一定是渐近最优的。
自校正控制系统可分为显式(间接)自校正控制系统和隐式(直接)自校正控制系统两类。
自动控制原理第十章非线性控制系统非线性控制系统是指系统动态特性不能用线性数学模型表示或者用线性控制方法解决的控制系统。
非线性控制系统是相对于线性控制系统而言的,在现实工程应用中,许多系统经常具有非线性特性,例如液压系统、电力系统、机械系统等。
非线性控制系统的研究对于实现系统的高效控制和稳定运行具有重要意义。
一、非线性控制系统的特点1.非线性特性:非线性控制系统的动态特性往往不能用线性方程或者线性微分方程描述,经常出现非线性现象,如饱和、死区、干扰等。
2.多变量关联:非线性系统动态关系中存在多个变量之间的相互影响,不同变量之间存在复杂的耦合关系,难以分离分析和解决。
3.滞后响应:非线性系统的响应时间较长,且在过渡过程中存在较大的像后现象,不易预测和控制。
4.不确定性:非线性系统通常存在参数变化、外部扰动和测量误差等不确定性因素,会导致系统性能变差,控制效果下降。
二、非线性控制系统的分类1.反馈线性化控制:将非线性系统通过适当的状态反馈、输出反馈或其它形式的反馈转化为线性系统,然后采用线性控制方法进行设计。
2.优化控制:通过建立非线性系统的数学模型,利用优化理论和方法,使系统达到其中一种性能指标最优。
3.自适应控制:根据非线性系统的参数变化和不确定性,设计自适应控制器,实时调整控制参数,以适应系统的动态变化。
4.非线性校正控制:通过建立非线性系统的映射关系,将测量信号进行修正,以减小系统的非线性误差。
5.非线性反馈控制:根据非线性系统的特性,设计合适的反馈控制策略,使得系统稳定。
三、非线性控制系统设计方法1.线性化方法:通过将非线性系统在其中一工作点上线性化,得到局部的线性模型,然后利用线性控制方法进行设计和分析。
2.动态编程方法:采用动态系统优化的方法,建立非线性系统的动态规划模型,通过求解该模型得到系统的最优控制策略。
3.反步控制方法:通过构造适当的反步函数和反步扩散方程,实现系统状态的稳定和输出的跟踪。

第十章电磁感应第1讲电磁感应现象楞次定律选择题(本题共15小题,1~10题为单选,11~15题为多选)1.(2021·北京高三一模)用图中三套实验装置探究感应电流产生的条件,下列选项中能产生感应电流的操作是(B)A.甲图中,使导体棒AB顺着磁感线方向运动,且保持穿过ABCD中的磁感线条数不变B.乙图中,使条形磁铁匀速穿过线圈C.丙图中,开关S闭合后,A、B螺线管相对静止一起竖直向上运动D.丙图中,开关S保持闭合,使小螺线管A在大螺线管B中保持不动[解析]甲图中,使导体棒AB顺着磁感线方向运动,AB不切割磁感线,故不能产生感应电流,另外也可以从保持穿过ABCD中的磁感线条数不变的角度看,磁通量没变化,故也不产生感应电流,A错误;乙图中,使条形磁铁匀速穿过线圈,在磁铁从上向下穿过时,穿过线圈的磁通量会变化,故产生感应电流,B正确;丙图中,开关S闭合后,A、B螺线管相对静止一起竖直向上运动,两线圈没有相对运动,B中的磁通量没变化,故不产生感应电流,C错误;丙图中,开关S保持闭合,使小螺线管A在大螺线管B中保持不动时也不会使B中的磁通量变化,故也不能产生感应电流,D错误。
2.(2021·浙江高三一模)如图是漏电保护器的部分电路图,由金属环,线圈,控制器组成,其工作原理是控制器探测到线圈中有电流时会把入户线断开,即称电路跳闸,下列有关漏电保护器的说法正确的是(C)A.当接负载的电线中电流均匀变化时,绕在铁芯上的线圈中有稳定的电流B.当接负载的电线短路或电流超过额定值时,漏电保护器会发出信号使电路跳闸C.只有当接负载的电线漏电时,绕在铁芯上的线圈中才会有电流通过D.当接负载的电线中电流不稳定时,漏电保护器会发出信号使电路跳闸[解析]漏电保护器的工作原理是控制器探测到线圈中有电流时会把入户线断开,线圈的磁通量是由流入负载的导线中的电流和流出负载的导线中的电流在线圈中产生的磁通量的叠加,由于一般情况下,流入负载导线中的电流和流出负载导线中的电流等大反向,故线圈中的磁通量为零,无电流产生。


《控制工程基础》电子教案第一章:绪论1.1 课程介绍解释控制工程的定义、目的和重要性概述控制工程的应用领域和学科范围1.2 控制系统的基本概念介绍控制系统的定义和组成解释输入、输出、反馈和控制器的概念1.3 控制工程的历史和发展回顾控制工程的发展历程和重要里程碑讨论现代控制工程的挑战和发展趋势第二章:数学基础2.1 线性代数介绍矩阵、向量的基本运算和性质讲解线性方程组的求解方法2.2 微积分复习微积分的基本概念和公式讲解导数和积分的应用2.3 离散时间信号介绍离散时间信号的定义和特点讲解离散时间信号的运算和处理方法第三章:连续控制系统3.1 连续控制系统的概述介绍连续控制系统的定义和特点解释连续控制系统的应用领域3.2 传递函数讲解传递函数的定义和性质介绍传递函数的绘制和分析方法3.3 控制器设计讲解PID控制器和模糊控制器的原理和方法讨论控制器设计的考虑因素和优化方法第四章:离散控制系统4.1 离散控制系统的概述介绍离散控制系统的定义和特点解释离散控制系统的应用领域4.2 差分方程和离散传递函数讲解差分方程的定义和求解方法介绍离散传递函数的定义和性质4.3 控制器设计讲解离散PID控制器和模糊控制器的原理和方法讨论控制器设计的考虑因素和优化方法第五章:状态空间方法5.1 状态空间模型的概述介绍状态空间模型的定义和特点解释状态空间模型的应用领域5.2 状态空间方程讲解状态空间方程的定义和求解方法介绍状态空间方程的稳定性分析5.3 状态控制器设计讲解状态控制器的原理和方法讨论状态控制器设计的考虑因素和优化方法第六章:频域分析6.1 频率响应介绍频率响应的定义和作用讲解频率响应的实验测量方法6.2 频率特性分析系统频率特性的性质和图形讨论频率特性对系统性能的影响6.3 滤波器设计讲解滤波器的基本类型和设计方法分析不同滤波器设计指标的选择和计算第七章:数字控制系统7.1 数字控制系统的概述介绍数字控制系统的定义和特点解释数字控制系统的应用领域7.2 数字控制器设计讲解Z变换和反变换的基本原理介绍数字PID控制器和模糊控制器的设计方法7.3 数字控制系统的仿真与实现讲解数字控制系统的仿真方法和技术讨论数字控制系统的实现和优化第八章:非线性控制系统8.1 非线性系统的概述介绍非线性系统的定义和特点解释非线性系统的应用领域8.2 非线性模型和分析方法讲解非线性系统的建模方法和分析技术分析非线性系统的稳定性和可控性8.3 非线性控制策略讲解非线性PID控制器和模糊控制器的原理和方法讨论非线性控制策略的设计和优化第九章:鲁棒控制9.1 鲁棒控制的概述介绍鲁棒控制的定义和目的解释鲁棒控制在控制工程中的应用领域9.2 鲁棒控制设计方法讲解鲁棒控制的基本设计和评估方法分析不同鲁棒控制策略的性能和特点9.3 鲁棒控制在实际系统中的应用讲解鲁棒控制在工业和航空航天等领域的应用案例讨论鲁棒控制在实际系统中的挑战和限制第十章:控制系统的设计与实践10.1 控制系统的设计流程讲解控制系统设计的基本流程和方法分析控制系统设计中的关键环节和技术选择10.2 控制系统实践案例分析不同控制系统实践案例的设计和实现过程讲解控制系统实践中的注意事项和优化方法10.3 控制系统的发展趋势讨论控制系统未来的发展方向和挑战分析新兴控制技术和方法在控制系统中的应用前景重点和难点解析重点环节1:控制系统的基本概念和组成控制系统定义和组成的理解输入、输出、反馈和控制器的相互作用重点环节2:传递函数和控制器设计传递函数的定义和性质PID控制器和模糊控制器的设计方法和应用重点环节3:差分方程和离散传递函数差分方程的求解方法离散传递函数的定义和性质重点环节4:状态空间模型的建立和分析状态空间方程的定义和求解状态空间模型的稳定性和可控性分析重点环节5:频率响应和滤波器设计频率响应的实验测量和分析滤波器设计方法和应用重点环节6:数字控制系统和控制器设计Z变换和反变换的应用数字PID控制器和模糊控制器的设计方法重点环节7:非线性系统的建模和控制策略非线性系统的建模方法非线性控制策略的设计和优化重点环节8:鲁棒控制的设计和评估鲁棒控制的基本设计和评估方法鲁棒控制策略的性能和特点重点环节9:控制系统的设计流程和实践案例控制系统设计的基本流程和方法控制系统实践案例的设计和实现过程重点环节10:控制系统的发展趋势和新兴技术控制系统未来的发展方向新兴控制技术和方法在控制系统中的应用前景本教案涵盖了控制工程基础的十个重点环节,包括控制系统的基本概念和组成、传递函数和控制器设计、差分方程和离散传递函数、状态空间模型的建立和分析、频率响应和滤波器设计、数字控制系统和控制器设计、非线性系统的建模和控制策略、鲁棒控制的设计和评估、控制系统的设计流程和实践案例以及控制系统的发展趋势和新兴技术。
第十章DMA控制器8237A1.试说明在DMA方式下,传输单个数据的全过程。
答:内存往外设传输单个数据:(1)当一个接口准备就绪,要进行DMA传输时,该接口往DMA 控制器发一个DMA请求;(2)DMA控制器采样到DRED有效电平后,若屏蔽寄存器是开放的,便往控制总线上发一个总线保持请求;(3)若CPU允许让出总线,则发回一个总线保持允许信号;(4)DMA控制器接到此信号后,就将其内部地址寄存器的内容送到地址总线上;(5)同时,DMA控制器往接口发一个DMA回答信号,并发出一个内存读信号和一个I/O写信号;(6)接口收到DMA回答信号后,撤除DMA请求信号,且内存把数据送到数据总线上;(7)接口锁存数据总线上的数据后,一般往DMA控制器回送一个准备好信号;(8)DMA控制器的地址寄存器内容加1或减1,字节计数器的值减1;(9)DMA控制器撤除总线保持请求信号,CPU收回总线控制权。
这样,就完成了对一个数据的DMA输出过程。
外设往内存传输单个数据的过程:(1)当一个接口中有数据要输入时,就往DMA控制器发一个DMA 请求信号;(2)DMA控制器接到DMA请求后,(若屏蔽触发器是开放的)便往控制总线上发一个总线保持请求信号;(3)若CPU允许让出总线,则发回一个总线保持允许信号;(4)DMA控制器接到此信号后,就将其内部地址寄存器的内容送到地址总线上;(5)同时,DMA控制器往接口发一个DMA回答信号,并发一个I /O读信号和一个内存写信号;(6)接口收到DMA回答信号后,撤除DMA请求信号,并将数据送到数据总线上;(7)内存在收到数据后,一般往DMA控制器回送一个准备好信号;(8)DMA控制器的地址寄存器内容加1或减1,字节计数器的值减1;(9)DMA控制器撤除总线保持请求信号,CPU收回总线控制权。
这样,就完成了对一个数据的DMA输入过程。
2.为使DMA控制器正常工作,系统对DMA控制器进行初始化的过程分为哪两个主要方面?答:(1) 将数据传输缓冲区的起始地址或结束地址送到地址寄存器中;(2) 将传输的字节数或字数送到计数器中。