计算机图形学2
- 格式:doc
- 大小:109.50 KB
- 文档页数:9

《计算机图形学》练习试题及参考答案二、选择题(每题2分)B 1、计算机图形学与计算几何之间的关系是( )。
A)学术上的同义词B)计算机图形学以计算几何为理论基础C)计算几何是计算机图形学的前身D).两门毫不相干的学科B 2、计算机图形学与计算机图象学的关系是( )。
A)计算机图形学是基础,计算机图象学是其发展B)不同的学科,研究对象和数学基础都不同,但它们之间也有可转换部分C)同一学科在不同场合的不同称呼而已D)完全不同的学科,两者毫不相干C 3、触摸屏是( )设备。
A)输入B)输出C)输入输出D)既不是输入也不是输出B 4.计算机绘图设备一般使用什么颜色模型?( )A)RGB;B)CMY;C)HSV ;D)HLS A 5. 计算机图形显示器一般使用什么颜色模型?( )A)RGB;B)CMY;C)HSV ;D)HLS C 6.分辨率为1024×1024的显示器各需要多少字节位平面数为24的帧缓存?( )A)512KB;B)1MB;C)2MB ;D)3MBD 7.哪一个不是国际标准化组织(ISO)批准的图形标准?( )A)GKS;B)PHIGS;C)CGM ;D)DXF C8.下述绕坐标原点逆时针方向旋转a角的坐标变换矩阵中哪一项是错误的? ( )| A B || C D |A) cos a;B) sin a;C) sin a;D) cos aA 9、在多边形的逐边裁剪法中,对于某条多边形的边(方向为从端点S 到端点P)与某条裁剪线(窗口的某一边)的比较结果共有以下四种情况,分别需输出一些顶点.请问哪种情况下输出的顶点是错误的? ( )A)S和P均在可见的一侧,则输出S和P.B)S和P均在不可见的一侧,则输出0个顶点.C)S在可见一侧,P在不可见一侧,则输出线段SP与裁剪线的交点.D)S在不可见的一侧,P在可见的一侧,则输出线段SP与裁剪线的交点和P.C 10、在物体的定义中对边的哪条限制不存在? ( )A) 边的长度可度量且是有限的B) 一条边有且只有两个相邻的面C) 一条边有且只有两个端点D) 如果一条边是曲线,那么在两个端点之间不允许曲线自相交D11.下述哪一条边不是非均匀有理B样条(NURBS)的优点? ( )A) NURBS比均匀B样条能表示更多的曲面B) 对于间距不等的数据点,用NURBS拟合的曲线比用均匀B 样条拟合的曲线更光滑C) NURBS提供的权控制方法比用控制点更能有效的控制曲线的形状D) 使用NURBS可以提高对曲面的显示效率C 12.下列关于图的存储表示的叙述中,哪一个是不正确的?A) 无向图的相邻矩阵是对称矩阵B) 对于带权的图,其相邻矩阵中值为1的元素,其值可以用边的权来权替C) 用邻接表法存储包括n个结点的图需要保存一个顺序存储的结点表和n个链接存储的边表D) 用邻接表法存储包括n条边的图需要保存一个顺序存储的结点表和n个链接存储的边表C13*.在面片的数量非常大的情况下哪一个消隐算法速度最快? ( )A) 深度缓存算法(Z-Buffer)B) 扫描线消隐算法C) 深度排序算法(画家算法)D) 不知道B14*.下面关于深度缓存消隐算法(Z-Buffer)的论断哪一条不正确? ( )A) 深度缓存算法并不需要开辟一个与图像大小相等的深度缓存数组B) 深度缓存算法不能用于处理对透明物体的消隐C) 深度缓存算法能并行实现D) 深度缓存算法中没有对多边形进行排序D15.在用射线法进行点与多边形之间的包含性检测时,下述哪一个操作不正确? ( )A) 当射线与多边形交于某顶点时且该点的两个邻边在射线的一侧时,计数0次B) 当射线与多边形交于某顶点时且该点的两个邻边在射线的一侧时,计数2次C) 当射线与多边形交于某顶点时且该点的两个邻边在射线的两侧时,计数1次D) 当射线与多边形的某边重合时,计数1次D 16*、扫描消隐算法在何处利用了连贯性(相关性Coherence)?(1)计算扫描线与边的交点;(2)计算多边形在其边界上的深度;(3)计算多边形视窗任意点处的深度值;(4)检测点与多边形之间的包含性。

一、 判断题(10x1=10分)1、 构成图形的要素可分为两类:刻画形状的点、线、面、体的非几何要素与反映物体表面属性或材质的明暗、色彩等的几何要素。
( 错误 )2、 参数法描述的图形叫图形;点阵法描述的图形叫图像。
( 正确 )3、 EGA/VGA 为增强图形显示效果的一种图形处理软件的名称。
( 错误 )4、 对山、水等不规则对象进行造型时,大多采用过程式模拟方法。
( 正确 )5、 若两个图形是拓扑等价的,则一个图形可通过做弹性运动与另一个图形相重合。
( 正确 )6、 0阶参数连续性和0阶几何连续性的定义是相同的。
( 正确 )7、 Bezier 曲线可做局部调整。
( 错误 )8、 字符的图形表示分为点阵和矢量两种形式。
( 正确 )9、 LCD 表示发光二极管显示器。
( 错误 )10、 使用齐次坐标可以将n 维空间的一个点向量唯一的映射到n+1维空间中。
( 错误 ) 二、 填空题(15x2=30分)1、目前常用的PC 图形显示子系统主要由3个部件组成:(1)帧缓冲存储器、(2)显示控制器、(3)ROM BIOS 。
2、 图形的输入设备有(4)键盘、鼠标、光笔(至少写三种);图形的显示设备有(5)CRT 显示器、LCD 、投影仪(至少写三种)。
3、常用坐标系一般可以分为:建模坐标系、用户坐标系、(6观察坐标系、(7)规格化设备坐标系、(8)设备坐标系。
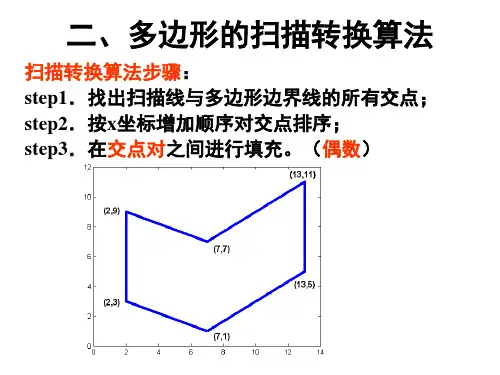
4、在多边形的扫描转换过程中,主要是通过确定穿越多边形区域的扫描线的覆盖区间来填充,而区域填充则是从(9)给定的位置开始涂描直到(10)指定的边界条件为止。
5、一个交互式计算机图形系统应具有(11)计算 、(12)存储、(13)对话、(14)输入和输出等五个方面的功能。
三、 简答题(5x6=30分)1、 请列举常用的直线段裁减算法(四种)。
答:答:直接求交算法、编码算法、中点再分算法、Cyrus-Beck 算法。
2、 考虑三个不同的光栅系统,分辨率依次为480640⨯,10241280⨯,20482560⨯。
第一章绪论概念:计算机图形学、图形、图像、点阵法、参数法、图形的几何要素、非几何要素、数字图像处理;计算机图形学和计算机视觉的概念及三者之间的关系;计算机图形系统的功能、计算机图形系统的总体结构。
第二章图形设备图形输入设备:有哪些。
图形显示设备:CRT的结构、原理和工作方式。
彩色CRT:结构、原理。
随机扫描和光栅扫描的图形显示器的结构和工作原理。
图形显示子系统:分辨率、像素与帧缓存、颜色查找表等基本概念,分辨率的计算第三章交互式技术什么是输入模式的问题,有哪几种输入模式。
第四章图形的表示与数据结构自学,建议至少阅读一遍第五章基本图形生成算法概念:点阵字符和矢量字符;直线和圆的扫描转换算法;多边形的扫描转换:有效边表算法;区域填充:4/8连通的边界/泛填充算法;内外测试:奇偶规则,非零环绕数规则;反走样:反走样和走样的概念,过取样和区域取样。
5.1.2 中点 Bresenham 算法(P109)5.1.2 改进 Bresenham 算法(P112)习题答案习题5(P144)5.3 试用中点Bresenham算法画直线段的原理推导斜率为负且大于1的直线段绘制过程(要求写清原理、误差函数、递推公式及最终画图过程)。
(P111)解: k<=-1 |△y|/|△x|>=1 y为最大位移方向故有构造判别式:推导d各种情况的方法(设理想直线与y=yi+1的交点为Q):所以有: y Q-kx Q-b=0 且y M=y Qd=f(x M-kx M-b-(y Q-kx Q-b)=k(x Q-x M)所以,当k<0,d>0时,M点在Q点右侧(Q在M左),取左点 P l(x i-1,y i+1)。
d<0时,M点在Q点左侧(Q在M右),取右点 Pr(x i,y i+1)。
d=0时,M点与Q点重合(Q在M点),约定取右点 Pr(x i,y i+1) 。
所以有递推公式的推导:d2=f(x i-1.5,y i+2)当d>0时,d2=y i+2-k(x i-1.5)-b 增量为1+k=d1+1+k当d<0时,d2=y i+2-k(x i-0.5)-b 增量为1=d1+1当d=0时,5.7 利用中点 Bresenham 画圆算法的原理,推导第一象限y=0到y=x圆弧段的扫描转换算法(要求写清原理、误差函数、递推公式及最终画图过程)。
中国地质大学(武汉)课题:计算机图形学班级:191113姓名:杨耀鹏源程序#include<gl/glut.h>#include<iostream.h>#include<stdlib.h>typedef struct dePt{int x;int y;}dePt;void fill(GLint x1,GLint y1,GLint z1) {glBegin(GL_POINTS);glVertex3f(x1,y1,0.0f);glEnd();}typedef struct Edge{int yUpper;float xIntersect, dxPerScan;struct Edge *next;}Edge;void insertEdge(Edge *list, Edge *edge) {Edge *p,*q=list;p=q->next;while(p!=NULL){if(edge->xIntersect<p->xIntersect)p=NULL;else{q=p;p=p->next;}}edge->next=q->next;q->next=edge;}int yNext(int k, int cnt, dePt*pts){int j;if((k+1)>(cnt-1))j=0;elsej=k+1;while(pts[k].y==pts[j].y)if((j+1)>(cnt-1))j=0;else j++;return (pts[j].y);}void makeEdgeRec(dePt lower, dePt upper,int yComp,Edge *edge,Edge *edges[]) {edge->dxPerScan=(float)(upper.x-lower.x)/(upper.y-lower.y);edge->xIntersect=lower.x;if(upper.y<yComp)edge->yUpper=upper.y-1;elseedge->yUpper=upper.y;insertEdge(edges[lower.y],edge);}void buildEdgeList(int cnt,dePt *pts,Edge *edges[]){Edge *edge;dePt v1,v2;int i,yPrev=pts[cnt-2].y;v1.x=pts[cnt-1].x;v1.y=pts[cnt-1].y;for(i=0;i<cnt;i++){v2=pts[i];if(v1.y!=v2.y){edge=(Edge *)malloc(sizeof(Edge));if(v1.y<v2.y)makeEdgeRec(v1,v2,yNext(i,cnt,pts),edge,edges);elsemakeEdgeRec(v2,v1,yPrev,edge,edges);}yPrev=v1.y;v1=v2;}}void buildActiveList(int scan,Edge *active,Edge *edges[]){Edge *p,*q;p=edges[scan]->next;while(p)q=p->next;insertEdge(active,p);p=q;}}void fillScan(int scan,Edge *active){Edge *p1,*p2;int i;p1=active->next;while(p1){p2=p1->next;for(i=p1->xIntersect;i<p2->xIntersect;i++) fill((int)i,scan,3);p1=p2->next;}}void deleteAfter(Edge *q){Edge *p=q->next;q->next=p->next;free(p);}void updateActiveList(int scan,Edge *active) {Edge *q=active, *p=active->next;while(p)if(scan>=p->yUpper){p=p->next;deleteAfter(q);}else{p->xIntersect=p->xIntersect+p->dxPerScan; q=p;p=p->next;}void resortActiveList(Edge *active) {Edge *q,*p=active->next;active->next=NULL;while(p){q=p->next;insertEdge(active,p);p=q;}}void scanFill(int cnt,dePt *pts){Edge *edges[1024],*active;int i,scan;for(i=0;i<1024;i++){edges[i]=(Edge *)malloc(sizeof(Edge)); edges[i]->next=NULL;}buildEdgeList(cnt,pts,edges);active=(Edge *)malloc(sizeof(Edge)); active->next=NULL;for(scan=0;scan<1024;scan++){buildActiveList(scan,active,edges);if(active->next){fillScan(scan,active); updateActiveList(scan,active); resortActiveList(active);}}}void ChangeSize(GLsizei w,GLsizei h) {GLfloat nRange=400.0f;if(h==0) h=1;glViewport(0,0,w,h);glMatrixMode(GL_PROJECTION);glLoadIdentity();if(w<=h)glOrtho(-nRange,nRange,-nRange*h/w,nRange*h/w,-nRange,nRange);elseglOrtho(-nRange*h/w,nRange*h/w,-nRange,nRange,-nRange,nRange); glMatrixMode(GL_MODELVIEW);glLoadIdentity();}void Display(void){int n,x,y,i;cout<<"请输入多边形顶点数:"<<endl;cin>>n;dePt *t=new dePt[n];for(i=0;i<n;i++){cout<<"请输入第"<<i+1<<"个顶点坐标"<<endl;cin>>x>>y;t[i].x=x;t[i].y=y;glVertex2i(t[i].x,t[i].y);}glEnd();glFlush();scanFill(n,t);glFlush();glutPostRedisplay();}void Initial(void){glClearColor(2.0f,2.0f,2.0f,2.0f);glMatrixMode(GL_PROJECTION); //指定设置投影参数gluOrtho2D(-100.0,200.0,-100.0,150.0); //设置投影参数}void main(int argc,char*argv[]){glutInit(&argc,argv);glutInitDisplayMode(GLUT_SINGLE|GLUT_RGB); //初始化窗口的显示模式glutInitWindowSize(400,300); //设置窗口的尺寸glutInitWindowPosition(100,120); //设置窗口的位置glutCreateWindow("多边形的扫描转换与填充"); //设置一个名为多边形的扫描转换与填充的窗口glutDisplayFunc(Display); //设置当前窗口的显示调用函数Initial(); //完成窗口初始化glutMainLoop(); //启动主GLUT事件处理循环}运行结果。