ASM能力风暴机器人硬件和传感器介绍
- 格式:ppt
- 大小:2.27 MB
- 文档页数:29
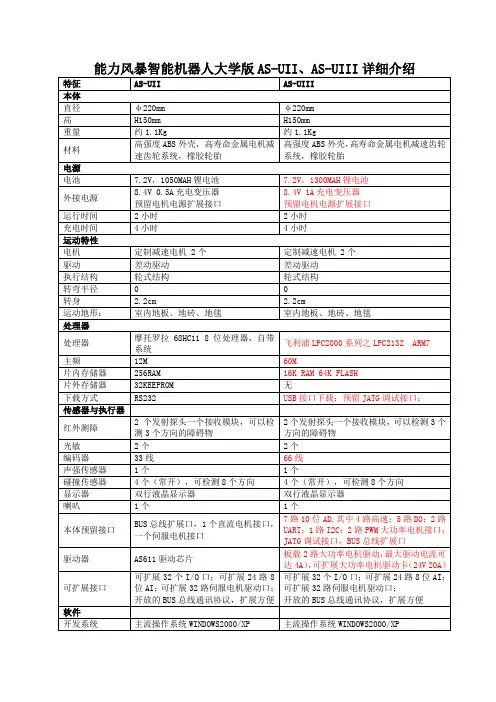
能力风暴机器人AS-UⅡ目标搜索研究张西良鲁立峰丁飞摘要:能力风暴机器人AS-UⅡ一般是通过一种或者两种自身携带的传感器实现目标搜索,但目标位置确定比较粗糙。
通过综合应用多种传感器,采用粗搜索和精搜索相结合的方法,建立随机漫游轨迹算法实现粗搜索,建立方向和位置误差算法以实现精搜索,最后设计了目标搜索程序进行了模拟仿真和实际应用试验。
结果表明:搜索目标可行,目标位置确定准确,其误差与一般搜索方法相比,大大降低,达到满意效果。
关键字:风暴机器人;目标搜索;路径规划0 引言能力风暴机器人AS-UⅡ(以下简称:AS-UⅡ)是上海广茂达公司生产的专门面向教育的机器人。
它提供了一个接口平台,可供用户进行扩展,实现二次开发,在软件,机械,电子等方面均有较强的延拓能力。
它采用图形化交互C语言(简称VJC)完成AS-UⅡ的软件开发,具有基于流程图的编程语言和交互式C语言(简称JC),便于用户自由发挥。
在基于AS-UⅡ家用机器人研究中,进行了机械的扩展,安装了机械手爪,可以实现对特定物品的抓取。
能力风暴机器人如何搜索目标,确定目标准确位置,以便机械手爪准确抓取特定物品,这是一个十分关键的问题。
因为能力风暴机器人AS-UⅡ一般是通过一种或者两种自身携带的传感器实现目标搜索,目标位置确定比较粗糙,同时AS-UⅡ手爪的自我调节范围有限,所以在研究中,通过综合应用AS-UⅡ的多种传感器,采用粗搜索和精搜索相结合的方法,建立搜索算法,来搜索目标并实现抓取目标物品。
1 能力风暴机器人AS-UⅡ功能特点AS-UⅡ是依靠传感器来与外界进行”交流”的,传感器探测到了外界信息,然后将它传给AS-UⅡ的”大脑”,”大脑”经过判断计算,控制执行机构输出动作。
AS-UⅡ自带五种传感器,包括:①碰撞传感器,能够检测到来自360度范围内物体的碰撞,使AS-UⅡ遭遇到来自不同方向的碰撞后,能够转弯避开并保持正常活动。
②红外传感器,用来检测前方,左前方,右前方的障碍,和人眼一样,在看见前方的障碍物后,可避开。
机器人技术及应用-机器人内部传感器机器人技术及应用机器人内部传感器在当今科技飞速发展的时代,机器人已经成为我们生活和生产中不可或缺的一部分。
从工业制造中的自动化生产线,到家庭服务中的智能助手,机器人的应用范围越来越广泛。
而机器人能够如此高效、精准地完成各种任务,很大程度上依赖于其内部的传感器。
这些传感器就如同机器人的“感觉器官”,为机器人提供了感知周围环境和自身状态的能力,从而使其能够做出准确的决策和动作。
机器人内部传感器主要包括位置传感器、速度传感器、加速度传感器、力传感器、扭矩传感器、姿态传感器等。
它们各司其职,共同保障机器人的正常运行和精确操作。
位置传感器是机器人中最基本的传感器之一。
它能够精确地测量机器人各个关节或部件的位置信息。
常见的位置传感器有电位计式、编码器式和霍尔效应式等。
电位计式位置传感器通过电阻的变化来反映位置的改变,结构简单但精度相对较低。
编码器式位置传感器则利用光电或电磁原理,能够实现高精度的位置测量,广泛应用于工业机器人等对精度要求较高的场合。
霍尔效应式位置传感器则基于霍尔效应,对磁场变化敏感,适用于一些特殊的应用场景。
速度传感器用于测量机器人运动部件的速度。
常见的速度传感器有测速发电机和光电式速度传感器。
测速发电机通过将机械转速转化为电信号来测量速度,具有较高的可靠性和稳定性。
光电式速度传感器则通过检测光脉冲的频率来计算速度,具有响应速度快、精度高的优点。
加速度传感器可以感知机器人的加速度变化。
在机器人的运动控制和姿态调整中发挥着重要作用。
常见的加速度传感器有压电式、电容式和压阻式等。
压电式加速度传感器利用压电材料的压电效应,具有灵敏度高、频率响应宽的特点。
电容式加速度传感器则通过电容的变化来测量加速度,精度较高。
压阻式加速度传感器基于压阻效应,结构简单、成本较低。
力传感器和扭矩传感器对于机器人与环境的交互以及精确的力控制至关重要。
力传感器能够测量机器人与外界物体接触时所受到的力,帮助机器人实现精确的抓取、操作和装配等任务。
机器人组成,元器件及功能介绍
机器人由不同的元器件组成,每个元器件都承担着不同的功能。
1. 处理器(CPU):处理器是机器人的大脑,其主要功能是执行计算、决策和控制机器人的各种动作。
2. 传感器:机器人配备了各种传感器,如摄像头、红外线传感器、超声波传感器等。
这些传感器能够获取来自外界的信息,如位置、距离、颜色等,并将这些信息传输给处理器进行进一步的处理和分析。
3. 电机和执行器:机器人使用电机和执行器来实现各种动作,如移动、抓取、旋转等。
电机将接收到的指令转化为机器人的物理动作。
4. 通信模块:机器人配备了通信模块,可以与其他机器人或外部设备进行通讯。
通过通信模块,机器人可以接收来自远程指令的控制,或将自己的状态和数据传输给其他机器人或外部设备。
5. 电源和电池:机器人需要电源供电,电源和电池为机器人提供所需的电能。
6. 执行单元:机器人可以配备执行单元,如机械臂、抓取器等。
这些执行单元可以根据机器人的任务需求来实现特定的操作和功能。
总体而言,这些元器件的功能互补,通过相互协作来实现机器人的各种任务和功能。
例如,传感器获取环境信息,处理器分析和决策,电机和执行器执行动作,通信模块实现与外界的交互。
简述机器人各部分的名称和作用机器人是指能够执行一系列任务或指令的自动化设备,它由多个部分组成,每个部分都具有特定的名称和作用。
下面是对机器人各部分的简要描述:1.机器人结构:机器人结构是机器人的基本框架,一般由金属材料制成。
机器人结构的作用是提供支撑和保护机器人的其他部分,同时也决定了机器人的外观和形状。
机器人结构还包括关节和链条等机械连接部件,用于实现机器人各部分的协调运动。
2.机器人传感器:机器人传感器用于感知周围环境的信息。
常见的机器人传感器包括摄像头、红外线传感器、超声波传感器、激光雷达等。
这些传感器能够实时监测和测量周围环境的各种参数,如距离、温度、湿度等,为机器人执行任务提供必要的信息。
3.机器人执行机构:机器人执行机构是机器人的动作执行部分,用于实现机器人的运动和操作。
常见的机器人执行机构包括电动机、液压系统、气动系统等。
这些执行机构能够通过控制机器人关节的运动,实现机器人在空间中的各种动作,如抓取、举起、运输等。
4.控制系统:机器人的控制系统负责对机器人的各个部分进行协调和控制,使机器人能够按照预定的任务执行指令。
控制系统包括硬件和软件两个部分。
硬件部分主要由控制器和传感器接口组成,用于接收传感器的输入信号和发送执行机构的控制信号。
软件部分主要由控制算法和编程语言组成,用于处理和分析传感器信息,并生成相应的控制指令。
5.人机交互界面:人机交互界面用于人类和机器人之间的信息交流和指令输入。
常见的人机交互界面包括触摸屏、语音识别、虚拟现实、手势识别等。
人机交互界面使得人类能够通过简单直观的方式与机器人进行交互,有效地控制和操作机器人。
6.电源和能源管理系统:机器人需要能量来支持其运行和执行任务,因此电源和能源管理系统是机器人的重要组成部分。
电源系统提供机器人所需的电能,能源管理系统用于对机器人的能源进行管理和优化。
这样可以确保机器人在执行任务过程中能够持续稳定地运行,提高机器人的工作效率和续航能力。

机器人硬件配置的说明书
为了让机器人工作正常并发挥最佳性能,我们将为您提供具体的机
器人硬件配置说明。
以下是硬件配置的详细描述。
1.机器人躯体
机器人躯体是由高强度材料制成的,并具有一定的灵活性,在保护
机器人内部电子设备的同时也可以承受一定程度的碰撞。
2.感应器
机器人的感应器由红外线、超声波、碰撞传感器和压力传感器等组成。
红外线和超声波传感器可以帮助机器人检测并避开障碍物。
碰撞
传感器和压力传感器可以检测到机器人是否与障碍物或墙壁发生碰撞,确保机器人不会受损。
3.测距仪
机器人配备高精度激光测距仪,可精确测量距离,并在机器人导航
时提供精确的距离数据。
这可以确保机器人在导航时不会偏离其预定
路径。
4.电机
机器人配备高质量的电机,可以为机器人提供稳定、持续的能量供应,并帮助机器人完成各种任务,如旋转、抓握、移动等。
5.摄像头
机器人配备高清摄像头,可捕获精美的图像,并在机器人导航和识别配有视觉感知功能的目标时发挥重要作用。
总结
以上是机器人硬件配置的详细说明。
这些硬件协同工作,确保机器人能够精确、高效地完成各种任务。
我们致力于提供高品质的机器人产品,使用户获得极佳的用户体验。
学习教程第1章预备知识1.1能1.1.1身体结构在VJC1.5的 :AS-M、AS-MII、AS-UII、AS-InfoX和AS-InfoM 。
图1-1 的 。
的身体结构 的 的。
的 的 为A S-MⅡ。
的 参见附录B。
图1-11.1.2感觉 官 的感觉 的 感 的。
身 的 感 :1. 感 感 和 。
程 的 。
在的 。
、 、 的 的 。
的如图1-2示。
图1-2 示 图2. 感 感 的 的 为0~255的 。
的 的 。
的 的3. 感 的 感、 、 、 的 为AS-InfoX的 、 、 的 。
如 的的 体在 。
在 程 程 的程 如 的 (参见附录B) 程、仿 运行。
如: 程 行走(M).flw面带M为AS-M程文件、仿 运行。
程行走(Info).flw为AS-InfoM程文件、仿 运行。
在 面 的 差(参见附录C、D)。
4. 感 感 的 为0~255的 。
。
的 的。
5. 面 感面 感 面的 的 为0~255的 。
面 面 。
的 。
1.1.3 程语言 的程语言 V J C1.5C语言(简 JC)和流程图 程语言 。
仿 的 流程图 程。
在 流程图程的 VJC1.5J C、 程参见图1-3。
在图1-3流程图JC 。
在流程图 面 的JC 快捷按钮程 的JC 。
图1-3 走 的VJ C 程1.2VJC1.5 能做什么1.2.1为 程在VJC1.5仿 流程图程 J C。
J C为程 。
在仿 的程 的 的。
目录第一章欢迎进入个人机器人时代 (1)1.1. 个人机器人时代 (1)1.2. 在学校应用能力风暴个人机器人 (1)第二章让你的个人机器人动起来 (3)2.1. 打开包装 (3)2.2. 了解能力风暴个人机器人 (3)2.3. 检测能力风暴 (4)2.4. 连接能力风暴 (6)2.5. 使用JC编程环境 (7)2.6. 让能力风暴跳舞 (9)第三章感觉、大脑与驱动器 (10)3.1. 个人机器人的三大要素 (10)3.2. 能力风暴的传感器及其处理电路 (11)3.2.1. 碰撞传感器 (11)3.2.2. 红外传感器 (13)3.2.3. 光敏传感器 (16)3.2.4. 麦克风 (19)3.2.5. 光电编码器 (20)3.2.6. 其他传感器 (23)3.3. 能力风暴的计算机硬件 (25)3.3.1. 微控制器 (25)3.3.2. 外部存储器 (28)3.3.3. 电源与复位电路 (30)3.3.4. 通信 (30)3.4. 驱动器 (31)3.4.1. 电机驱动电路 (31)3.4.2. 喇叭 (33)3.5. 硬件扩展总线ASBUS (33)3.5.1. 扩展2个光敏传感器 (34)3.5.2. 扩展2个红外接收传感器 (34)3.5.3. 扩展8个数字输出口 (35)第四章编程——赋予能力风暴智慧 (36)4.1. 第一个JC程序,H ELLO R OBOT! (36)4.2. 控制你的能力风暴 (36)4.2.1. 校正能力风暴的电机 (36)4.2.2. 走出规则轨迹 (37)4.3. 让能力风暴获得感知周围环境的能力。
(38)4.3.1. 能力风暴的基本程序结构 (38)4.3.2. 一个“台球”程序 (38)4.3.3. 红外和光敏的使用 (40)4.3.4. 编码器的使用 (41)4.4. 能力风暴的高级编程 (41)4.4.1. 第一个多进程程序 (41)4.4.2. 添加一个新进程 (42)4.4.3. JC进程同步的基本方法 (45)第五章尝试迷人的机器人项目,参加精彩的机器人比赛 (46)5.1. 机器人的行为控制 (46)5.2. 迷人的机器人项目 (48)5.3. 机器人比赛 (49)附录1:能力风暴库函数 (51)附录2:下载操作系统 (53)附录3:能力风暴控制板PCB 布局图 (54)附录4:能力风暴个人机器人性能指标 (54)附录5:能力风暴常见问题列表 (55)第一章欢迎进入个人机器人时代1.1. 个人机器人时代感谢你购买能力风暴个人机器人,你是全世界拥有个人机器人(P ersonal R obot)的先驱,如同在1975年拥有一台个人电脑(P ersonal C omputer)。