ProENGINEER与MATLABsimulink联合仿真设置
- 格式:doc
- 大小:134.00 KB
- 文档页数:3
MATLABSimulink模型建立与仿真指南第一章:MATLAB与Simulink简介MATLAB是一种高级的数值计算和科学分析的编程语言,由MathWorks开发。
它提供了强大的数学函数库和绘图工具,使得用户可以进行复杂的数值计算和数据可视化。
Simulink是MATLAB的扩展,是一种用于建立和仿真动态系统的图形化环境。
在MATLAB中,用户可以通过命令行或脚本文件进行计算。
而在Simulink中,用户可以利用图形化界面来搭建系统模型,并进行仿真。
Simulink提供了丰富的预置模块库,用户只需将这些模块连接起来,即可构建复杂的系统模型。
第二章:Simulink模型的基本组成Simulink模型由多个部分组成,包括输入信号、输出信号和系统组件。
输入信号可以是手动输入的常数,也可以是来自其他模型的信号。
输出信号是用户对系统模型感兴趣的结果。
系统组件即模型中的各个模块,这些模块可以完成各种功能,如乘法、滤波、逻辑运算等。
第三章:模型建立与仿真流程1. 确定系统模型的目标和需求:在建立模型之前,需要明确系统模型的目标和需求。
这些可能包括系统的输入输出关系、稳定性要求、性能要求等。
2. 模型建立:根据系统的目标和需求,选择合适的系统组件,并将其连接起来,构建系统模型。
可根据需要进行参数设置,以适应不同的场景。
3. 仿真设置:在进行仿真之前,需要设置仿真参数。
这些包括仿真时间、仿真步长等。
仿真时间指定了仿真的时间范围,仿真步长指定了仿真的时间间隔。
4. 仿真运行:设置好仿真参数后,可以运行仿真。
Simulink将逐步模拟系统的行为,并输出仿真结果。
第四章:Simulink模型调试与优化在进行仿真时,可能会发现模型存在问题,如输出不符合预期、系统不稳定等。
这时需要对模型进行调试和优化。
1. 系统调试:可以通过数据观察、信号域分析等方法,定位系统问题。
更换输入信号、输出信号,或调整模型参数,可以帮助发现问题。
Simulink是Simulation和link仿真链接。
是一个附加组件,为用户提供了一个建模与仿真的工作平台,由于许多功能是基于MATLAB平台的。
必须在MATLAB环境中运行,也把他称为一个MATLAB的工具箱。
以前MATLAB仿真编程是在文本窗口中进行的。
输入函数是命令和MATLAB 函数,在simulink 中与用户的交互接口是基于windows的模型化图形输入,用户可以通过单击拖动鼠标的方式绘制和组织系统,并完成对系统的仿真。
因此对于我们来说只需知道这些功能模块的输入输出、功能以及图形界面的使用方法。
就可以用鼠标和键盘进行仿真。
三种方法进入Simulink1、在MATLAB菜单栏中单击FILE,在下拉菜单的NEW选项中单击MODEL.2、在MATLAB工具栏中单击彩色图标,然后在打开的模型库浏览器窗口中单击‘新建文件‘3、在MATLAB命令窗口中输入Simulink,然后在打开的模型库浏览器窗口中单击‘新建文件‘。
一、模块的提取左键拖曳右键add to二、模块的移动放大和缩小移动:左键拖曳选中后用方向键脱离线移动按住shift 然后拖曳缩放 : 点击模块四个角拖曳三、复制粘贴和删除和windows一样删除选择clear四、模块的旋转:右键点击然后选择Flip block 顺时针转180度 rotate block顺时针90度。
五、模块名的修改移动:单击该模块名出现一个小框可以像文本一样修改移动还可以右键单击然后Hide name六、模块参数设置:双击七、模块连接:光标的箭头对准模块的输出端变成+后按下左键拖曳到另一个输入端松开左键。
八、连线的弯折开始画线时,在需要弯折的地方松开鼠标停顿一下,然后继续按下鼠标左键改变方向即可。
移动光标指向要移动的线段,然后拖动鼠标即可删除选中要删除的部分,然后delete直流电动机的直接启动新建一个simulink 仿真平台打开simulink然后点击新建打开simpowersystems的加号在electrical source中选择D C Voltage Source拖曳到仿真平台Elements里面选BreakerConnectors 里面选择Ground output把电源正端接到断路器的1端,电源负端接地。
matlab中simulink仿真的搭建规则
在MATLAB的Simulink中进行仿真搭建,需要遵循以下规则:
1. 模型文件:启动Simulink后,可以在Simulink Library Browser窗口中,通过拖放模块进行模型搭建。
模型搭建完成后,需要将其保存为.slx文件格式。
2. 模块的连接:在Simulink中,可以通过鼠标拖动模块的端口进行连接。
连接时,需要确保连接线在两个模块之间完全接触,以避免出现断路或接触不良的情况。
3. 模块的参数设置:在连接模块后,需要进入每个模块的参数设置界面,根据需要进行参数设置。
例如,可以设置输入信号的幅值、频率等参数。
4. 仿真时间的设置:在Simulink中,可以设置仿真的起始时间和结束时间。
通常,仿真的时间范围应该覆盖输入信号的整个周期。
5. 仿真结果的显示:在Simulink中,可以通过将示波器模块连接到输出端口来显示仿真结果。
示波器模块可以实时显示输出信号的波形。
以上是Simulink中进行仿真搭建的基本规则,但具体的搭建规则可能会因应用场景和模型复杂度的不同而有所差异。
因此,建议在具体的仿真项目中,仔细阅读官方文档和教程,以了解更多关于搭建规则和操作细节的信息。
simulink/modelsim联合仿真XX学生的师傅2016年5月13日Simulink/Modelsim 联合仿真操作步骤本人使用的matlab版本为:matlab R2014a ; modelsim版本为:Modelsim SE-64 10.1c。
以下内容是参考自matlab帮助文档,结合自己第一次联合仿真的经验得出,如有不到之处,不能帮助解决问题还请原谅。
第一次使用markdown,如阅读体验不好,你咬我啊以下正文1.新建目录2.在matlab中配置cosimulation block1.在matlab中运行cosimWizard。
2.按要求配置。
3.在simulink或matlab中搭建仿真模型4.从matlab或simulink中启动modelsim两种方法:•在matlab中运行vism或vism('socketsimulink'),4449 ,其中4449为端口号,根据实际情况确定。
之后需在modelsim中加载verilog文件,并输入vsimulink work.uq_pmsm ,其中uq_pmsm为实体名,根据实际情况替换。
•双击simulink中的Launch HDL Simulator块启动modelsim。
以下两种情况: - 方法一启动实体仿真、方法二modelsim加载实体完成后,若一直显示loading。
- 直接在simulink中运行仿真时出现错误,提示change port。
可进入任务管理器结束lmutil.exe进程。
黑科技,不确保有效。
5.在simulink中启动仿真,此时modelsim会同步进行仿真。

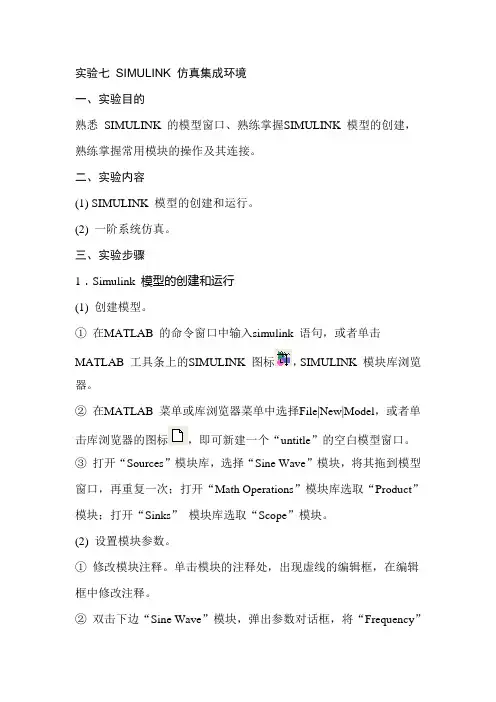
实验七SIMULINK 仿真集成环境一、实验目的熟悉SIMULINK 的模型窗口、熟练掌握SIMULINK 模型的创建,熟练掌握常用模块的操作及其连接。
二、实验内容(1) SIMULINK 模型的创建和运行。
(2) 一阶系统仿真。
三、实验步骤1.Simulink 模型的创建和运行(1) 创建模型。
①在MATLAB 的命令窗口中输入simulink 语句,或者单击MATLAB 工具条上的SIMULINK 图标,SIMULINK 模块库浏览器。
②在MATLAB 菜单或库浏览器菜单中选择File|New|Model,或者单击库浏览器的图标,即可新建一个“untitle”的空白模型窗口。
③打开“Sources”模块库,选择“Sine Wave”模块,将其拖到模型窗口,再重复一次;打开“Math Operations”模块库选取“Product”模块;打开“Sinks”模块库选取“Scope”模块。
(2) 设置模块参数。
①修改模块注释。
单击模块的注释处,出现虚线的编辑框,在编辑框中修改注释。
②双击下边“Sine Wave”模块,弹出参数对话框,将“Frequency”设置为100;双击“Scope”模块,弹出示波器窗口,然后单击示波器图标,弹出参数对话框,修改示波器的通道数“Number of axes”为3。
③如图A4 所示,用信号线连接模块。
图A4(3) 启动仿真①单击工具栏上的图标或者选择Simulation|Start 菜单项,启动仿真;然后双击“Scope”模块弹出示波器窗口,可以看到波形图。
②修改仿真步长。
在模型窗口的Simulation 菜单下选择“Configuration Parameters”命令,把“Max step size”设置为0.01;启动仿真,观察波形是不是比原来光滑。
③再次修改“Max step size”为0.001;设置仿真终止时间为10s;启动仿真,单击示波器工具栏中的按钮,可以自动调整显示范围,可以看到波形的起点不是零点,这是因为步长改小后,数据量增大,超出了示波器的缓冲。

如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。

MATLABSimulink联合仿真指南MATLAB Simulink联合仿真指南第一章:MATLAB和Simulink概述1.1 MATLAB的介绍1.1.1 MATLAB的起源和发展1.1.2 MATLAB的基本特点和优势1.1.3 MATLAB的应用领域1.2 Simulink的介绍1.2.1 Simulink的基本概念和原理1.2.2 Simulink在系统建模和仿真中的应用1.2.3 Simulink与其他仿真软件的比较1.3 MATLAB和Simulink的关系1.3.1 MATLAB和Simulink的协同工作原理1.3.2 MATLAB和Simulink的应用场景第二章:MATLAB基础2.1 MATLAB语言基础2.1.1 MATLAB的数据类型和变量2.1.2 MATLAB的基本运算和函数2.1.3 MATLAB的控制结构2.2 MATLAB图形界面2.2.1 MATLAB的命令窗口和编辑器 2.2.2 MATLAB的图形窗口和绘图工具2.3 MATLAB的数据处理与分析2.3.1 数据导入和导出2.3.2 数据操作和处理2.3.3 数据可视化第三章:Simulink基础3.1 Simulink的基本组成3.1.1 模型、系统和信号的概念3.1.2 Simulink模型的创建和编辑3.1.3 Simulink模型的参数设置3.2 Simulink的基本元素3.2.1 Simulink的信号类型和传输线3.2.2 Simulink的模块和子系统3.2.3 Simulink的运算器和逻辑门3.3 Simulink的仿真过程3.3.1 仿真参数的设置3.3.2 仿真的执行和结果分析3.3.3 仿真模型的调试和优化第四章:MATLAB和Simulink的联合应用4.1 MATLAB与Simulink的数据交互4.1.1 数据导入和导出的方法4.1.2 数据传输和共享的技巧4.1.3 数据处理和分析的整合4.2 MATLAB和Simulink的调用和扩展4.2.1 MATLAB函数在Simulink中的应用4.2.2 Simulink模型的MATLAB脚本控制4.2.3 Simulink模型的自定义函数和库4.3 MATLAB和Simulink的联合仿真案例分析 4.3.1 电路系统仿真4.3.2 控制系统仿真4.3.3 信号处理系统仿真第五章:MATLAB和Simulink的高级应用5.1 MATLAB在系统设计和优化中的应用5.1.1 优化算法和工具的使用5.1.2 系统性能评估和参数调整5.1.3 系统设计的可视化和交互5.2 Simulink在实时仿真和硬件连接中的应用5.2.1 实时仿真的基本概念和要素5.2.2 Simulink和硬件连接的方法和工具5.2.3 实时仿真案例分析5.3 MATLAB和Simulink在自动化测试和验证中的应用 5.3.1 自动化测试的需求和挑战5.3.2 MATLAB和Simulink在测试自动化中的应用5.3.3 测试验证的案例和结果结语:MATLAB Simulink联合仿真的前景和发展6.1 MATLAB Simulink在工程教学和研究中的意义6.2 MATLAB Simulink的应用前景和发展趋势参考文献注:以上章节的标题仅为示例,具体内容和顺序可根据实际情况进行调整。
实验三 利用Matlab 和Simulink 进行系统仿真设计一.实验目的通过实验对一个汽车运动控制系统进行实际设计与仿真,掌握控制系统性能的分析和仿真处理过程,熟悉用Matlab 和Simulink 进行系统仿真的基本方法。
二. 实验设备个人计算机,Matlab 软件。
三. 实验准备预习本实验相关说明,复习PID 控制器的原理和作用,明确汽车运动控制系统问题的描述及其模型表示,编写本次仿真练习的相应程序。
四. 实验说明本实验是对一个汽车运动控制系统进行实际设计与仿真,其方法是先对汽车运动控制系统进行建摸,然后对其进行PID 控制器的设计,建立了汽车运动控制系统的模型后,可采用Matlab 和Simulink 对控制系统进行仿真设计。
注意:设计系统的控制器之前要观察该系统的开环阶跃响应,采用阶跃响应函数step( )来实现,如果系统不能满足所要求达到的设计性能指标,需要加上合适的控制器。
然后再按照仿真结果进行PID 控制器参数的调整,使控制器能够满足系统设计所要求达到的性能指标。
五. 实验内容1. 问题的描述如下图所示的汽车运动控制系统,设该系统中汽车车轮的转动惯量可以忽略不计,并且假定汽车受到的摩擦阻力大小与汽车的运动速度成正比,摩擦阻力的方向与汽车运动的方向相反,这样,该汽车运动控制系统可简化为一个简单的质量阻尼系统。
根据牛顿运动定律,质量阻尼系统的动态数学模型可表示为:⎩⎨⎧==+v y u bv v m 系统的参数设定为:汽车质量m =1000kg ,比例系数b =50 N ·s/m ,汽车的驱动力u =500 N 。
根据控制系统的设计要求,当汽车的驱动力为500N 时,汽车将在5秒内达到10m/s 的最大速度。
由于该系统为简单的运动控制系统,因此将系统设计成10%的最大超调量和2%的稳态误差。
这样,该汽车运动控制系统的性能指标可以设定为:上升时间:t r <5s ;最大超调量:σ%<10%;稳态误差:e ssp <2%。
simulink matlab仿真环境教程Simulink是面向框图的仿真软件。
演示一个Simulink的简单程序【例1.1】创建一个正弦信号的仿真模型。
步骤如下:(1) 在MATLAB的命令窗口运行simulink 命令,或单击工具栏中的图标,就可以打开Simulink模块库浏览器(Simulink Library Browser) 窗口,如图1.1所示。
图7.1 Simulink界面(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink下的Source子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled窗口,如图1.2所示。
(5)用同样的方法打开接收模块库“Sinks”,选择其中的“Scope”模块(示波器)拖放到“untitled”窗口中。
(6) 在“untitled”窗口中,用鼠标指向“Sine Wave”右侧的输出端,当光标变为十字符时,按住鼠标拖向“Scope”模块的输入端,松开鼠标按键,就完成了两个模块间的信号线连接,一个简单模型已经建成。
如图1.3所示。
(7) 开始仿真,单击“untitled”模型窗口中“开始仿真”图标,或者选择菜单“Simulink”——“Start”,则仿真开始。
双击“Scope”模块出现示波器显示屏,可以看到黄色的正弦波形。
目录1:什么是link for modelsim2:link for modelsim的安装与设置3:使用link for modelsim仿真的实例什么是link for modelsimLink for modelsim是一个联合仿真的接口,它将MathWorks工具整合到EDA工作环境中,使其应用于FPGA和ASIC的开发。
这个接口在HDL仿真器ModelSim SE/PE于MathWorks的产品Matlab和SimuLink间提供了一个双向连接,以指导硬件的设计验证和联合仿真。
这种整合可以分别充分发挥Matlab/SimuLink和ModelSim各自的优势。
1.联合仿真环境Link for ModelSim是一个客户/服务器的车是平台和联合仿真应用,ModelSim在这个仿真环境中所起的作用取决于ModelSim与Matlab还是SimuLink连接,本说明只讲ModelSim与Matlab的连接。
a.ModelSim与Matlab连接当与Matlab相连接时,ModelSim作为客户端,如下图所示:在这个模式中,Matlab服务器等到ModelSim客户端发出的服务请求,当接收到一个请求时,Matlab建立一个通信连接,而且调用一个指定的Matlab函数,这个函数封装了用于计算数据以验证或者使当前在ModelSim中仿真的HDL模型的可视化。
下图显示了在一个测试平台环境中Matlab函数如何与ModelSim进行通信Matlab服务器可以用于多个HDL实体之间的联合仿真,但是你必须为多个HDL实体指定一个通信方式使他们可以相互通信,下图显示了两个ModelSim客户端如何连接到服务器的TCP/IP的4449端口:回到目录2.通信模式在ModelSim和Matlab之间的通信模式有共享内存和网络两种,当你的ModelSim和MatLab运行与同一个系统的时候,可以指定为共享内存方式和网络方式,但共享内存方式更加合适,其也是默认的方式。
Pro\ENGINEER与MATLAB\simulink联合仿真设置一、首先确认安装proe时,安装了pro/toolkit,如下为pro/toolkit安装说明1、在默认安装时是不安装pro/toolkit,在安装过程中选择pro/toolkit,如下图注意:安装proe时,安装目录不要有空格,在进行二次开发时,有空格容易出错。
二、安装matlab工具smlink工具,可以到matlab官方下载,免费的。
1、安装smlink(可以到/products/simmechanics/download_smlink.html下载)。
1)将smlink30.win32.zip和install_addon.m放入MATLAB起始位置目录下面,打开matlab2) 在MATLAB命令窗口输入install_addon('<add-on ZIP file name>.zip')命令,引号内是下载的压缩文件名;3) 运行上述命令,命令窗口提示Installing smlink...Extracting archive smlink31.win32.zip to C:\Program Files\MATLAB\R2009a...Adding directories for smlink to path...Installation of smlink complete.To view documentation, type "doc smlink".2、设置proe里simmechanicls插件1)找到pro/toolkit安装目录,在目录里找到protk.dat文件(如果没有可以自己创建,随便命名),如我的是在D:\Program Files\proeWildfire 4.0\protoolkit\protk.dat2)用记事本打开protk.dat文件,向里面添加如果是Pro/ENGINEER Wildfire 3 以及早期版本如2001、2.0等添加如下内容:name SimMechanics Linkstartup dllexec_file $matlabroot/bin/arch/cl_proe2sm.dlltext_dir $matlabroot/toolbox/physmod/smlink/cad_systems/proe/endPro/ENGINEER Wildfire 4 及以后版本如5.0添加如下内容的如下:name SimMechanics Linkstartup dllexec_file $matlabroot/bin/arch/cl_proe2sm.dlltext_dir $matlabroot/toolbox/physmod/smlink/cad_systems/proe/unicode_encoding falseend注,以上$matlabroot为绝对路径,可以参考本人设置,我的protk.dat文件添加内容如下(我的为4.0版本,装置d盘)NAME SimMechanics LinkSTARTUP dllEXEC_FILE C:\Program Files\MATLAB\R2010b\bin\win32\cl_proe2sm.dllTEXT_DIR C:\Program Files\MATLAB\R2010b\toolbox\physmod\smlink\cad_systems\proe\textUNICODE_ENCODING falseEND添加完成后保存文件3)修改proe气动目录下的config.pro(如果没有此文件可自行创建)文件,用记事本打开此文件,向里面添加如下内容:toolkit_registry_file C:\Program Files\proeWildfire 4.0\protoolkit\protk.dat4)保存文件后,打开proe可以看到菜单栏多出5)至此已完成,可以自行测试,将proe文件导出为xml格式。
Pro\ENGINEER与MATLAB\simulink联合仿真设置
Pro\ENGINEER与MATLAB\simulink联合仿真设置,转载请注明(/bssdlkhzau/ihome/myblog)
一、首先确认安装proe时,安装了pro/toolkit,如下为pro/toolkit安装说明
1、在默认安装时是不安装pro/toolkit,在安装过程中选择pro/toolkit,如下图
注意:安装proe时,安装目录不要有空格,在进行二次开发时,有空格容易出错。
二、安装matlab工具smlink工具,可以到matlab官方下载,免费的。
1、安装smlink(可以到/products/simmechanics/download_smlink.html 下载)。
1)将smlink30.win32.zip和install_addon.m放入MATLAB起始位置目录下面,打开matlab
2) 在MATLAB命令窗口输入install_addon('<add-on ZIP file name>')命令,引号内是下载的压缩文件名;
3) 运行上述命令,命令窗口提示
Installing smlink...
Extracting archive smlink31.win32.zip to C:\Program Files\MATLAB\R2009a...
Adding directories for smlink to path...
Installation of smlink complete.
To view documentation, type "doc smlink".
2、设置proe里simmechanicls插件
1)找到pro/toolkit安装目录,在目录里找到protk.dat文件(如果没有可以自己创建,随便命名),如我的是在D:\Program Files\proeWildfire 4.0\protoolkit\protk.dat
2)用记事本打开protk.dat文件,向里面添加
如果是Pro/ENGINEER Wildfire 3 以及早期版本如2001、2.0等添加如下内容:
name SimMechanics Link
startup dll
exec_file $matlabroot/bin/arch/cl_proe2sm.dll
text_dir $matlabroot/toolbox/physmod/smlink/cad_systems/proe/
end
Pro/ENGINEER Wildfire 4 及以后版本如5.0添加如下内容的如下:
name SimMechanics Link
startup dll
exec_file $matlabroot/bin/arch/cl_proe2sm.dll
text_dir $matlabroot/toolbox/physmod/smlink/cad_systems/proe/ unicode_encoding false
end
注,以上$matlabroot为绝对路径,可以参考本人设置,我的protk.dat文件添加内容如下(我的为4.0版本,装置d盘)
NAME SimMechanics Link
STARTUP dll
EXEC_FILE D:\Program Files\MATLAB\R2010b\bin\win32\cl_proe2sm.dll
TEXT_DIR D:\Program Files\MATLAB\R2010b\toolbox\physmod\smlink\cad_systems\proe\text UNICODE_ENCODING false
END
添加完成后保存文件
3)修改proe气动目录下的config.pro(如果没有此文件可自行创建)文件,用记事本打开此文件,向里面添加如下内容:
toolkit_registry_file D:\Program Files\proeWildfire 4.0\protoolkit\protk.dat
4)保存文件后,打开proe可以看到菜单栏多出
5)至此已完成,可以自行测试,将proe文件导出为xml格式。
进入simmechanics里测试,命令如下
xml文件调用方法:
import_physmod(or mech_import)或import_physmod(or mech_import)(‘*.xml’)导入模型。
如下为一些参考网站,
protoolkit安装:/s/blog_515365250100ddbv.html
联合仿真官网说明:/help/toolbox/physmod/smlink/ref/brnjwm7-1.html 联合仿真实例:/products/simmechanics/demos.html
solidworks与matlab联合仿真设置:
/home.php?mod=space&uid=361679&do=blog&id=283874
proe和matlab联合仿真配置:
/bgwangjun/blog/item/68d7842a8d5c2f91023bf609.html
ug和matlab联合仿真实例:/v_show/id_XMTk3Nzg3OTIw.html
matlab里机械仿真系统simmechanicas实例:/user_show/id_UMjQ4MzExODI0.html。