07924控制工程基础孔祥东机械工业出版社解析
- 格式:ppt
- 大小:946.50 KB
- 文档页数:16
控制工程基础教学大纲课程名称:控制工程基础课程编码:1005601学时:34学时学分:2学分开课学期:第六学期适用专业:机械工程及其自动化、包装工程、交通运输课程类别:必修课程性质:专业基础课先修课程:高等数学、工程数学、普通物理学、电路原理、模拟电子技术。
教材:《控制工程基础》王益群孔祥东主编机械工业出版社一、课程的性质、目的与任务:本课程是机械设计制造及自动化、材料成型与控制工程等机械类专业和相关专业的必修课。
通过本课程的学习将为学习自动控制方面的其它课程奠定良好的理论基础。
课程教学所要达到的目的:使学生正确理解和掌握本课程所涉及的基本概念、基本理论和基本分析方法。
能独立地应用这些基本理论、基本方法来分析实际工程中提炼出来的各种控制理论问题;同时强化动态的、系统的思想方法。
并使学生具有一定的工程计算和设计能力。
二、课程的基本内容:1、绪论自动控制理论发展简况,反馈控制理论的研究对象和方法。
自动控制系统的基本概念、术语、自动控制系统的组成和分类,应用举例。
对自动控制系统的基本要求。
2、控制系统的数学模型数学模型的基本概念、表达方式,建模方法简述。
微分方程的列写,微分方程线性化的基本思想。
拉氏变换的简单回顾:拉氏变换的定义、性质,常见的简单函数的拉氏变换式应能记住。
拉氏反变换。
传递函数的概念及基本环节的传递函数。
控制系统的方框图及方框图的简化。
梅逊增益公式(选讲)。
3、控制系统的时域分析控制系统的典型输入信号,及时域响应指标。
一阶系统的瞬态响应及指标。
二阶系统的瞬态响应分析及其与极点之间的关系,二阶系统的瞬态响应指标与参量ζ、ω间的关系及计算。
n高阶系统的瞬态响应的简单分析,闭环主导极点的概念。
4、控制系统的频率特性频率特性的基本概念,频率特性的两种主要表达方式:幅相频率特性、对数频率特性。
典型环节的频率特性。
最小相位系统的概念。
系统开环频率特性(奈奎斯特图和伯德图)的绘制。
系统辨识的概念及利用实测开环幅频特性确定系统的开环传递函数。
控制工程基础第4版孔祥东课后习题答案第一章控制系统概述1. 在控制系统中,反馈是什么?在控制系统中,反馈是指从输出端采集到的信息再反馈给输入端,用于校正系统输出与期望输出之间的误差。
通过反馈,控制系统可以对输出进行调整,以达到期望的控制效果。
2. 什么是开环和闭环系统?开环系统是指输出不会对系统的输入产生反馈影响的系统。
开环系统的控制过程是单向的,只能由输入来决定输出。
闭环系统是指输出会对系统的输入产生反馈影响的系统。
闭环系统的控制过程是双向的,可以通过输出的反馈来调整输入。
3. 开环控制和闭环控制有什么区别?开环控制和闭环控制的区别在于是否存在输出的反馈。
开环控制没有输出的反馈,输入和输出之间的关系是固定的,依赖于系统的数学模型。
闭环控制有输出的反馈,可以不断根据输出的反馈信息来调整输入,使输出更接近期望值。
开环控制的优点是简单、快速,但容易受到外界干扰的影响,稳定性较差。
闭环控制可以更精确地控制输出,具有较好的稳定性和鲁棒性。
4. 什么是控制对象和控制器?控制对象是指需要控制的物理系统或过程,它是待控制的主体。
控制对象可以是机械系统、电气系统、化工过程等等。
控制器是指用来控制控制对象的设备或算法。
控制器可以根据输入和反馈信息来计算出适当的输出,以实现对控制对象的控制。
5. 什么是开环传递函数和闭环传递函数?开环传递函数是指在开环控制下,从控制器的输入到控制对象输出之间的传递函数关系。
它反映了输入和输出之间的数学关系。
闭环传递函数是指在闭环控制下,从控制器的输入到控制对象输出之间的传递函数关系。
闭环传递函数考虑了输出的反馈,更准确地描述了控制系统的动态特性。
第二章传递函数与系统稳定性1. 什么是传递函数?传递函数是指输入和输出之间的数学关系函数,可以用来描述线性时不变系统的动态特性。
传递函数通常用符号G(s)表示,其中s为复变量。
传递函数可以通过对系统进行数学建模和信号处理等方法得到。
它可以表示系统的频率响应和时域响应等信息。

《控制工程基础》教学大纲课程名称:控制工程基础适用班级: 2016级机电一体化(专科函授1 业余2)、机械制造与自动化(专科函授2 业余3)汽车运用技术(业余3)辅导教材:《控制工程基础》(第3版)孔祥东等编著机械工业出版社一、本课程的地位、任务和作用《控制工程基础》作为机械工程类专业尤其是机械设计制造及其自动化专业的一门重要理论基础之一,既是一门广义的系统动力学,又是一种合乎唯物辩证法的方法论,在培养学生综合设计能力、工程实践能力和启迪与发展学生思维与智力方面均占有重要地位,为培养机械工程人才,特别是机电(液)一体化人才方面,发挥着重要作用。
本课程的任务是通过课堂教学,使学生获得机械工程控制论的基本概念、基本知识与基本方法,培养学生紧密结合机械工程实际,特别是机械制造工程实际,使自动控制的理论知识与实践知识相统一,支撑专业学习成果中相应指标点的达成。
二、本课程的相关课程先修课程:《电工技术》、《高等数学》、《机械原理》、《机械设计》等。
三、本课程的基本内容及要求第一章绪论1、了解自动控制理论研究的对象、作用;2、掌握自动控制系统结构、工作原理及系统结构方框图;3、掌握输入量、输出量、反馈、偏差等基本概念;4、了解控制系统的组成、分类及基本要求。
重点是自动控制系统工作原理、系统结构方框图及输入量、输出量、反馈、偏差等基本概念。
第二章控制系统的数学模型1、掌握机械、电气系统微分方程的建立方法;2、了解非线性方程的线性化;3、熟悉拉普拉斯变换及反变换、线性定常微分方程的解法;4、熟悉传递函数;5、掌握系统传递函数方框图的化简。
重点是微分方程、传递函数、拉普拉斯变换及反变换、解微分方程、化简传递函数方框图;难点是建立微分方程及化简传递函数方框图。
第三章控制系统的时间响应分析1、掌握一阶系统的时间响应;2、掌握二阶系统的时间响应与性能指标;3、了解高阶系统零、极点对时间响应的影响;4、掌握控制系统稳定性分析与劳斯判据;5、掌握控制系统稳态误差分析、计算。
浅析控制工程基础课程教学与实践作者:陈东菊范晋伟来源:《课程教育研究》2018年第46期【摘要】《控制工程基础》是机械类专业一门重要的专业基础课。
作为专业基础课,具有较强的理论性和实践性。
本文针对学生教学模式,突出实践和作业环节,强化学生动手思考、理论转化为实践能力,提高学生学习积极性,适应国家发展需要,显著提高教学质量。
【关键词】《控制工程基础》课程教学实践【基金项目】本科重点建设课程资助项目(KC2017SB038, KC2017MT010)。
【中图分类号】G642.0 【文献标识码】A 【文章编号】2095-3089(2018)46-0241-011.《控制工程基础》课程重要性《控制工程基础》课程是机械学院本科生的一门专业基础课,它对学生在整个专业课学习中起到承前启后的作用,为学生日后成为工程检测人员打下理论基础。
因此《控制工程基础》的开设对培养学生学习运用控制原理的基本方法,提高分析和解决各种工程问题的能力和适应国家人才需要有极其重要意义。
2.理论教学2.1课程教学主干课程内容包含:机电系统建模、系统时域瞬态响应分析、频域分析、系统稳定性及误差分析、控制器的设计,其中,机电系统建模涉及系统运动微分方程的建立、传递函数定义和求解、系统方框图简化等内容,而拉普拉斯变化及反变换是其数学基础;系统时域瞬态响应分析包括一阶系统和二阶系统的时间响应,并给出了性能指标,误差的分析和计算是其中引出来的一个内容,频域分析包括Nyquist和Bode的画法,稳定性的问题可融入这一部分,包括代数判据和几何判据;系统稳定性及误差分析、控制器的设计是最后综合应用的内容。
2.2课程教学重难点《控制工程基础》具有较强的综合性,涉及数学等多种学科,并且内容抽象,工程实践性强,这就要求学生具有高等数学等相关课程的知识,但学生往往对相关基础知识掌握不牢固、对学科交叉内容理解不充分,因此学习这门课程时困难重重,学习目标不明确,学习积极性不高。
控制工程基础教学大纲课程名称:控制工程基础课程编码:1005601学时:45学时学分:2.5学分开课学期:第六学期适用专业:机械工程及其自动化、包装工程、交通运输课程类别:必修课程性质:专业基础课先修课程:高等数学、工程数学、普通物理学、电路原理、模拟电子技术。
教材:《控制工程基础》王益群孔祥东主编机械工业出版社一、课程的性质、目的与任务:本课程是机械设计制造及自动化、材料成型与控制工程等机械类专业和相关专业的必修课。
通过本课程的学习将为学习自动控制方面的其它课程奠定良好的理论基础。
课程教学所要达到的目的:使学生正确理解和掌握本课程所涉及的基本概念、基本理论和基本分析方法。
能独立地应用这些基本理论、基本方法来分析实际工程中提炼出来的各种控制理论问题;同时强化动态的、系统的思想方法。
并使学生具有一定的工程计算和设计能力。
二、课程的基本内容:1、绪论自动控制理论发展简况,反馈控制理论的研究对象和方法。
自动控制系统的基本概念、术语、自动控制系统的组成和分类,应用举例。
对自动控制系统的基本要求。
2、控制系统的数学模型数学模型的基本概念、表达方式,建模方法简述。
微分方程的列写,微分方程线性化的基本思想。
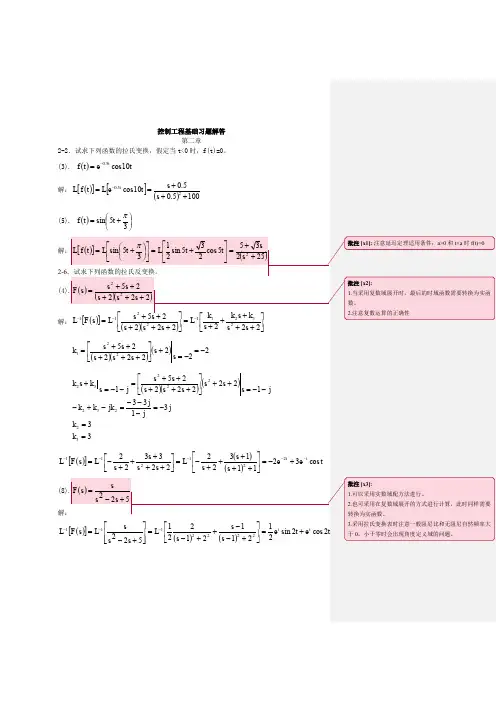
拉氏变换的简单回顾:拉氏变换的定义、性质,常见的简单函数的拉氏变换式应能记住。
拉氏反变换。
传递函数的概念及基本环节的传递函数。
控制系统的方框图及方框图的简化。
梅逊增益公式(选讲)。
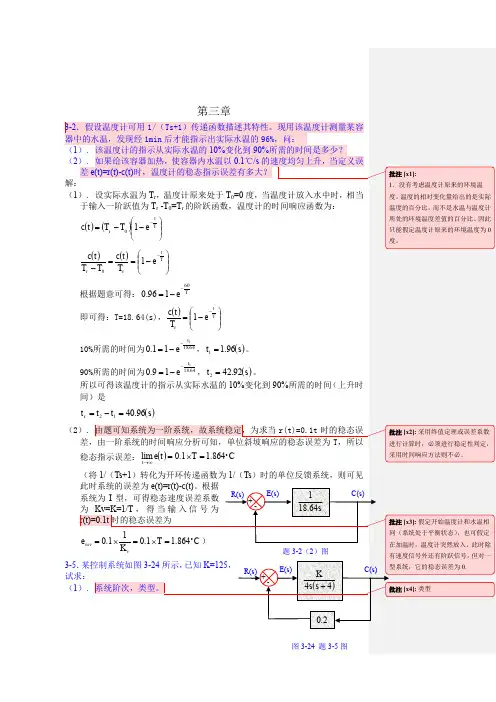
3、控制系统的时域分析控制系统的典型输入信号,及时域响应指标。
一阶系统的瞬态响应及指标。
二阶系统的瞬态响应分析及其与极点之间的关系,二阶系统的瞬态响应指标与参量ζ、ω间的关系及计算。
n高阶系统的瞬态响应的简单分析,闭环主导极点的概念。
4、控制系统的频率特性频率特性的基本概念,频率特性的两种主要表达方式:幅相频率特性、对数频率特性。
典型环节的频率特性。
最小相位系统的概念。
系统开环频率特性(奈奎斯特图和伯德图)的绘制。
系统辨识的概念及利用实测开环幅频特性确定系统的开环传递函数。