上位机通讯协议
- 格式:pdf
- 大小:82.48 KB
- 文档页数:8
上位机协议上位机协议是指上位机与下位机之间进行通讯和数据交换时所遵循的一套规范和约定,它定义了双方之间的通讯数据格式、通信方式、协议命令等内容。
上位机协议的设计可以使得上位机能够与下位机稳定、高效地进行数据交换,从而实现各种功能和任务。
上位机协议一般包括以下几个方面的内容。
首先是通讯数据格式的定义。
这包括通信数据帧的格式、标识位、校验位等。
通信数据帧的格式一般采用头部和数据两部分组成,头部用于识别数据的类型和长度等信息,数据则是具体的传输数据。
标识位用于在数据传输过程中标记数据帧的起始和结束位置,以便上位机和下位机能够正确地识别并解析数据帧。
校验位用于检验数据帧的完整性和正确性,一般采用校验和、CRC等方式进行。
其次是通信方式的定义。
上位机可以与下位机通过串口、以太网、USB等不同的通信接口进行通讯。
上位机协议需要定义具体的通信方式,包括物理层的接口类型、通信速率、数据位、停止位等。
同时还需要定义通信的传输模式,如单向传输、双向传输、请求-应答模式等。
通信方式的选择要基于实际的通信环境和需求进行,以确保通信的稳定和可靠。
再次是协议命令的定义。
上位机协议需要定义一系列的命令,用于上位机向下位机发送指令和请求数据。
这些命令包括控制命令、配置命令、查询命令等。
控制命令用于告知下位机执行某种操作,如启动、停止、设置参数等。
配置命令用于告知下位机进行特定的配置,如传感器的量程、滤波系数等。
查询命令用于向下位机请求数据,如传感器的实时数据、状态信息等。
这些命令需要有明确定义的格式和含义,以便上位机和下位机能够正确解析和执行。
最后是错误处理和异常情况的定义。
上位机协议需要定义一系列错误码和异常情况的处理方式。
当上位机发送的命令格式错误、参数超出范围或通信出现故障时,下位机需要能够正确识别并返回相应的错误码或异常信息。
上位机需要根据这些错误码和异常信息进行相应的处理,如重发命令、提示用户等。
上位机协议的设计需要综合考虑上位机和下位机的通信要求和功能需求,以及实际的通信环境和硬件资源情况。
RTU通讯协议协议名称:RTU通讯协议一、引言RTU通讯协议是为了实现远程终端单元(Remote Terminal Unit,简称RTU)与上位机之间的数据通讯而制定的协议。
本协议旨在确保数据的可靠传输、实时性和安全性,以满足各种工业自动化系统对数据通讯的需求。
二、术语定义1. RTU:远程终端单元,用于采集、处理和传输现场设备数据的装置。
2. 上位机:工业自动化系统中负责控制和监测RTU的计算机设备。
3. 数据帧:数据通讯中的基本传输单位,包含数据内容和必要的控制信息。
三、通讯协议规范1. 物理层规范1.1 通讯介质RTU与上位机之间的通讯介质可以是串行通讯线路或以太网。
串行通讯线路采用RS-485标准,波特率可根据实际需求设置。
以太网通讯采用TCP/IP协议。
1.2 通讯接口RTU设备应具备相应的串行通讯接口或以太网接口,以实现与上位机的通讯。
2. 数据链路层规范2.1 帧格式数据帧包括帧头、数据内容和帧尾。
帧头和帧尾用于标识数据帧的开始和结束。
帧头和帧尾的具体格式应根据实际情况进行设计。
2.2 帧校验为了确保数据传输的可靠性,每个数据帧应包含校验字段。
校验字段可采用循环冗余校验(CRC)或其他可靠的校验算法。
3. 传输层规范3.1 数据传输方式RTU与上位机之间的数据传输可以采用请求-响应方式或订阅-发布方式。
请求-响应方式要求上位机发送请求命令,RTU接收到请求后进行处理,并将响应数据返回给上位机。
订阅-发布方式要求RTU周期性地将数据上传至上位机,上位机不需要发送请求命令。
3.2 数据传输协议RTU与上位机之间的数据传输协议应采用标准化的协议,如Modbus、DNP3等。
具体协议的选择应根据实际需求和系统要求进行。
4. 应用层规范4.1 数据格式RTU与上位机之间的数据格式应符合系统要求,可以采用二进制、十进制、十六进制等格式进行数据表示。
4.2 数据解析上位机应具备相应的数据解析功能,能够将接收到的数据帧进行解析,并提取出有效的数据内容。
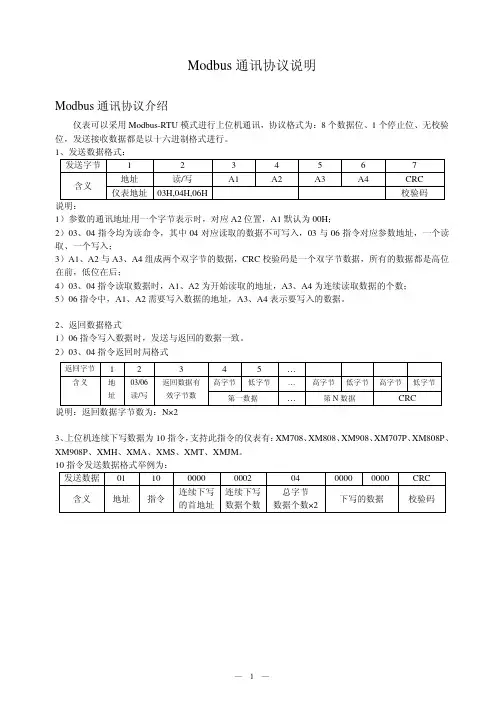
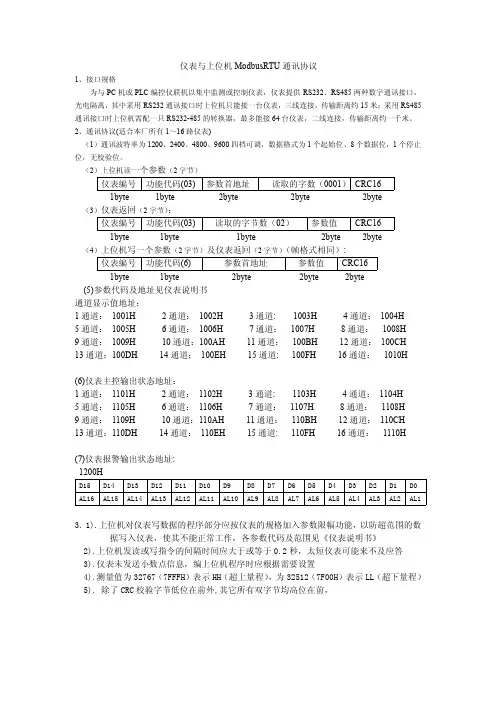
仪表与上位机ModbusRTU通讯协议1、接口规格为与PC机或PLC编控仪联机以集中监测或控制仪表,仪表提供RS232、RS485两种数字通讯接口,光电隔离,其中采用RS232通讯接口时上位机只能接一台仪表,三线连接,传输距离约15米;采用RS485通讯接口时上位机需配一只RS232-485的转换器,最多能接64台仪表,二线连接,传输距离约一千米。
2、通讯协议(适合本厂所有1~16路仪表)(1)通讯波特率为1200、2400、4800、9600四档可调,数据格式为1个起始位、8个数据位,1个停止位,无校验位。
(2)上位机读一个参数(2字节)仪表编号功能代码(03)参数首地址读取的字数(0001)CRC161byte1byte2byte2byte2byte(3)仪表返回(2字节):仪表编号功能代码(03)读取的字节数(02)参数值CRC161byte1byte1byte2byte2byte(4)上位机写一个参数(2字节)及仪表返回(2字节)(帧格式相同):仪表编号功能代码(6)参数首地址参数值CRC161byte1byte2byte2byte2byte(5)参数代码及地址见仪表说明书通道显示值地址:1通道:1001H2通道:1002H3通道:1003H4通道:1004H5通道:1005H6通道:1006H7通道:1007H8通道:1008H9通道:1009H10通道:100AH11通道:100BH12通道:100CH13通道:100DH14通道:100EH15通道:100FH16通道:1010H(6)仪表主控输出状态地址:1通道:1101H2通道:1102H3通道:1103H4通道:1104H5通道:1105H6通道:1106H7通道:1107H8通道:1108H9通道:1109H10通道:110AH11通道:110BH12通道:110CH13通道:110DH14通道:110EH15通道:110FH16通道:1110H(7)仪表报警输出状态地址:1200HD15D14D13D12D11D10D9D8D7D6D5D4D3D2D1D0 AL16AL15AL14AL13AL12AL11AL10AL9AL8AL7AL6AL5AL4AL3AL2AL13.1).上位机对仪表写数据的程序部分应按仪表的规格加入参数限幅功能,以防超范围的数据写入仪表,使其不能正常工作,各参数代码及范围见《仪表说明书》2).上位机发读或写指令的间隔时间应大于或等于0.2秒,太短仪表可能来不及应答3).仪表未发送小数点信息,编上位机程序时应根据需要设置4).测量值为32767(7FFFH)表示HH(超上量程),为32512(7F00H)表示LL(超下量程)5).除了CRC校验字节低位在前外,其它所有双字节均高位在前,。

上位机与plc通讯规则以上位机与PLC通讯规则一、概述以上位机与PLC通讯是指通过计算机控制的上位机与可编程逻辑控制器(PLC)之间进行数据交换和通讯的过程。
这种通讯方式在工业自动化控制系统中广泛应用,可以实现对PLC的监控、控制和数据采集等功能。
本文将介绍以上位机与PLC通讯的规则和方法。
二、通讯规则1. 通讯协议以上位机与PLC通讯需要遵循一定的通讯协议,常用的协议有Modbus、Profibus、Ethernet等。
通讯协议规定了通讯双方之间的数据格式、传输方式和通讯规则,确保数据的准确传输和解析。
2. 通讯方式以上位机与PLC通讯可以通过串口、以太网等方式进行。
串口通讯一般使用RS232、RS485等标准接口,以太网通讯则使用以太网线进行数据传输。
通讯方式的选择需要根据具体的应用场景和通讯距离来确定。
3. 数据传输以上位机与PLC通讯的数据传输可以分为请求和响应两个阶段。
上位机发送请求命令给PLC,PLC接收并处理请求后,将响应数据返回给上位机。
数据传输可以是单向的,也可以是双向的,根据具体的应用需求来确定。
4. 数据采集和控制以上位机与PLC通讯的主要目的是进行数据采集和控制。
上位机可以通过发送读取命令,获取PLC中的数据,如传感器数据、开关状态等。
同时,上位机还可以通过发送写入命令,控制PLC的输出,如控制执行器、开关设备等。
三、通讯方法1. Modbus通讯Modbus通讯是一种常用的以上位机与PLC通讯方式,其采用主从结构,上位机作为主站发送请求,PLC作为从站接收请求并响应。
Modbus通讯可以通过串口或以太网进行,具有简单、可靠的特点,广泛应用于工业自动化领域。
2. Profibus通讯Profibus通讯是一种基于现场总线的以上位机与PLC通讯方式,采用主从结构。
Profibus通讯可以实现高速传输和大容量数据交换,适用于复杂的自动化系统。
3. Ethernet通讯Ethernet通讯是一种基于以太网的以上位机与PLC通讯方式,具有高速传输和大带宽的特点。
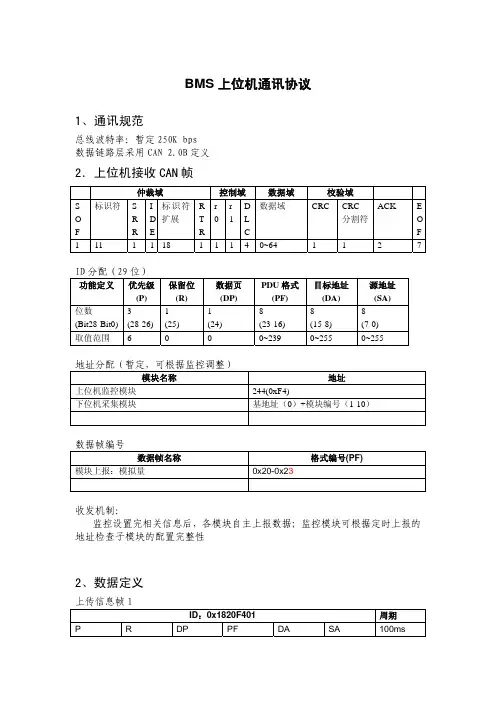
BMS上位机通讯协议1、通讯规范总线波特率:暂定250K bps数据链路层采用CAN 2.0B定义2.上位机接收CAN帧仲裁域控制域数据域校验域S O F 标识符SRRIDE标识符扩展RTRrr1DLC数据域 CRCCRC分割符ACK EOF1 11 1 1 18 1 1140~64 1 12 7 ID分配(29位)功能定义优先级(P) 保留位(R)数据页(DP)PDU格式(PF)目标地址(DA)源地址(SA)位数(Bit28-Bit0) 3(28-26)1(25)1(24)8(23-16)8(15-8)8(7-0)取值范围 6 0 0 0~239 0~255 0~255地址分配(暂定,可根据监控调整)模块名称地址上位机监控模块 244(0xF4)下位机采集模块基地址(0)+模块编号(1-10)数据帧编号数据帧名称格式编号(PF)模块上报:模拟量0x20-0x23收发机制:监控设置完相关信息后,各模块自主上报数据;监控模块可根据定时上报的地址检查子模块的配置完整性2、数据定义上传信息帧1ID:0x1820F401 周期P R DP PF DA SA 100ms6 0 0 32 (0x20)监控模块 采集模块 数据位置 数据名格式说明BYTE1 本模块第一节单体电压低字节 BYTE2 本模块第一节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第二节单体电压低字节 BYTE4 本模块第二节单体电压高字节 同上BYTE5 本模块第三节单体电压低字节 BYTE6 本模块第三节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上上传信息帧2ID: 0x1821F401周期P R DP PF DA SA 6 0 0 33 (0x21)监控模块 采集模块100ms数据位置 数据名格式说明BYTE1 本模块第四节单体电压低字节 BYTE2 本模块第四节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第五节单体电压低字节 BYTE4 本模块第五节单体电压高字节 同上BYTE5 本模块第六节单体电压低字节 BYTE6 本模块第六节单体电压高字节 同上 BYTE7 模块号 BYTE8箱号同上上传信息帧3ID: 0x1822F401周期P R DP PF DA SA 6 0 0 34 (0x22)监控模块 采集模块100ms数据位置 数据名格式说明BYTE1 本模块第七节单体电压低字节 BYTE2 本模块第七节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第八节单体电压低字节 BYTE4 本模块第八节单体电压高字节 同上BYTE5 本模块第九节单体电压低字节 BYTE6 本模块第九节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上上传信息帧4ID: 0x1823F401周期P R DP PF DA SA 6 0 0 35 (0x23)监控模块 采集模块100ms数据位置 数据名格式说明 BYTE1 本模块第十节单体电压低字节 BYTE2 本模块第十节单体电压高字节 1mV/Bit ,偏移量0;3000代表3VBYTE3 本模块第十一节单体电压低字节 BYTE4 本模块第十一单体电压高字节 同上BYTE5 本模块第十二节单体电压低字节 BYTE6 本模块第十二节单体电压高字节 同上 BYTE7 模块号 BYTE8 箱号同上。
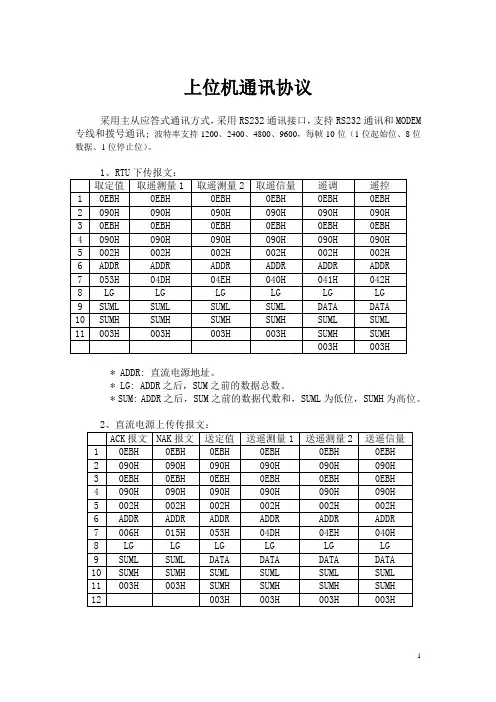
上位机通讯协议
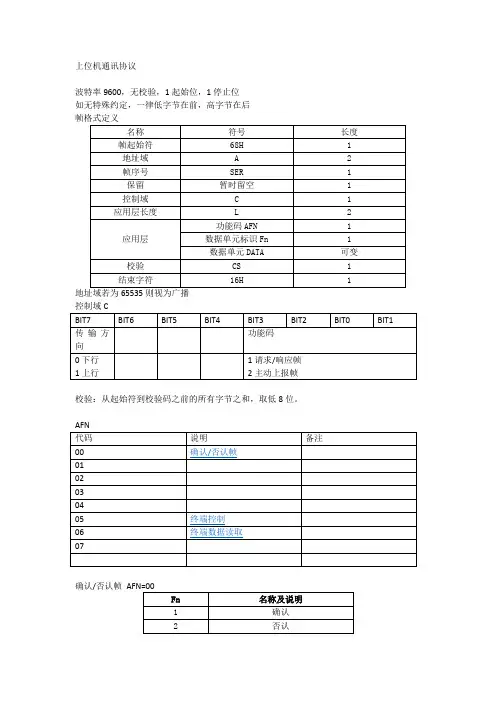
采用主从应答式通讯方式,采用RS232通讯接口,支持RS232通讯和MODEM 专线和拨号通讯;波特率支持1200、2400、4800、9600,每帧10位(1位起始位、8位数据、1位停止位)。
* ADDR: 直流电源地址。
* LG: ADDR之后,SUM之前的数据总数。
* SUM: ADDR之后,SUM之前的数据代数和,SUML为低位,SUMH为高位。
2.1 10A系统定值定义:
2.2系统遥测量1定义:
2.3系统遥测量2定义:
2.5 5A系统遥信量定义:
2.7小系统遥测量定义:
2.9系统遥调量定义: DATA 定义:每个遥调量由3字节构成,第1字节为信号编号,第2字节为遥调量低字节,第
3字节为遥调量高字节,每次送1个遥调量。
直流系统接收遥调命令正确执行后返回ACKI 命令,否则返回NAK 命令。
2.10系统遥控量定义:
DATA 定义:每个遥调量由2字节构成,第1字节为信号编号,第2字节为遥控量(00H:信号置0,0FFH:信号置1)。
直流系统接收遥控命令正确执行后返回ACKI命令,否则返回NAK命令。
机床通讯协议摘要本文主要介绍机床通讯协议的概念和作用,以及常见的机床通讯协议的种类和特点。
同时,还将探讨机床通讯协议在工业自动化领域的应用和发展前景。
1. 简介机床通讯协议是指机床(包括数控机床、机器人等)在进行数据通信时所遵循的规定协议。
由于机床作为工业自动化系统中重要的组成部分,其与其他设备之间的通讯是实现自动化过程控制的基础,因此机床通讯协议的研究和应用具有重要意义。
2. 机床通讯协议的种类和特点2.1 数控机床通讯协议数控机床通讯协议是指数控机床与外部设备(如工控机、上位机等)之间的数据通信协议。
常见的数控机床通讯协议有RS232、RS485、以太网等。
这些通讯协议通常定义了数据传输的格式、传输速率、校验方式等。
2.2 机器人通讯协议机器人通讯协议是指机器人与外部设备之间的数据通信协议。
与数控机床通讯协议相比,机器人通讯协议更加复杂,因为机器人通常需要实现更多功能,如位置控制、力控制、传感器数据采集等。
常见的机器人通讯协议有Modbus、Profinet、EtherCAT等。
2.3 特点机床通讯协议具有以下特点:•高可靠性:机床通讯协议在工业生产环境下使用,要求具有高可靠性,能够保证数据的完整性和准确性。
•实时性:机床通讯协议需要实时传输数据,以满足工业自动化系统对实时性的要求。
•可扩展性:随着工业自动化的发展,机床通讯协议需要不断适应新的技术和应用需求,具备较好的可扩展性。
•安全性:机床通讯协议要求能够保证数据的安全性,防止被非法篡改和窃取。
3. 机床通讯协议在工业自动化中的应用机床通讯协议在工业自动化中的应用非常广泛,主要包括以下方面:3.1 数据采集与监控工业自动化系统中的各种设备(如数控机床、机器人等)通常会产生大量的数据,这些数据用于监控和诊断设备的工作状态。
通过机床通讯协议,可以实现对设备数据的采集和监控,从而为生产管理提供重要的依据。
3.2 远程控制与操作机床通讯协议还可以实现对设备的远程控制和操作。

上位机和下位机的通讯协议是指在工业自动化等领域中,上位机(如计算机)与下位机(如PLC、传感器、执行器等控制设备)之间进行数据交换和通信所使用的协议。
常见的上位机和下位机通讯协议有以下几种:1. Modbus协议:- Modbus是一种串行通信协议,广泛应用于工业自动化领域。
-它定义了上位机与下位机之间的通信规范和数据格式,支持多种物理介质,如串口和以太网。
2. Profibus协议:- Profibus是一种广泛使用的工业现场总线协议。
-它兼容多种数据传输方式,包括串行通信和以太网,可实现上位机与下位机之间的实时数据传输和远程控制。
3. CAN(Controller Area Network)协议:- CAN是一种主要用于车载通信和工业控制系统的通信协议。
-它提供高可靠性、实时性和抗干扰能力,适用于需要快速和可靠数据传输的环境。
4. OPC(OLE for Process Control)协议:- OPC是一种开放标准的数据传输协议,用于连接上位机和下位机之间的数据通信。
-它允许不同厂家的设备和软件能够互相通信,实现数据采集、监控和控制功能。
5. Ethernet/IP协议:- Ethernet/IP是在以太网上运行的工业自动化通信协议。
-它基于TCP/IP协议栈,并使用标准以太网进行数据传输,实现上位机与下位机之间的实时数据交换和远程控制。
需要根据具体应用场景和设备要求选择合适的通讯协议。
在设计和实施通讯系统时,应确保上位机和下位机之间的通信协议相容性,同时考虑数据传输的速度、稳定性和安全性等方面的要求。
[备注:以上列举的通讯协议仅为常见示例,实际应用中可能涉及更多的协议类型和标准。
在具体项目中,请参考相关标准和设备提供商的文档,并咨询专业人士的建议。
]。
到上位机的通讯协议
上位机与下位机之间的通讯协议通常是通过串行通讯或者网络
通讯进行的。
串行通讯协议包括常见的RS-232、RS-485、Modbus等,而网络通讯协议则包括TCP/IP、UDP、HTTP等。
这些通讯协议在工
业控制、自动化领域中被广泛应用。
在串行通讯中,RS-232是一种较为常见的标准,它定义了串行
通讯的物理接口和信号规范。
RS-485则是一种多点通讯的标准,适
用于远距离通讯和多节点通讯。
Modbus是一种常见的工业领域通讯
协议,包括Modbus RTU和Modbus TCP两种形式,用于在工业控制
系统中传输数据。
在网络通讯中,TCP/IP协议是互联网和局域网中最常见的协议
之一,它提供了可靠的、面向连接的数据传输。
UDP协议则是一种
无连接的通讯协议,适用于实时性要求较高的数据传输。
HTTP协议
是超文本传输协议,用于在客户端和服务器之间传输超文本。
除了上述常见的通讯协议外,还有许多其他的通讯协议,如
CAN总线、Ethernet、Profibus等,它们在不同的应用场景中发挥
着重要作用。
总的来说,不同的通讯协议适用于不同的应用场景和需求,选择合适的通讯协议对于建立可靠的上位机与下位机通讯至关重要。
OMRONPLC通讯协议1. FINS协议(Factory Intelligent Network Service):FINS是OMRON PLC最常用的通信协议之一,用于在OMRON PLC和上位机之间进行数据传输和远程控制。
FINS协议支持多种通信介质,如串行通信、以太网通信等,并提供高效、稳定的数据传输方式。
3. Modbus协议:Modbus是一种常用的串行通信协议,用于在OMRON PLC和其他设备之间进行数据交换。
Modbus协议简单易用,适用于小型系统和较简单的控制任务。
它支持多种传输介质,如串口、以太网等,并提供实时数据传输和远程设备控制功能。
除了以上几种常见的OMRON PLC通信协议外,还有一些其他协议,如Profibus、Ethernet/IP等,它们具有不同的特点和适用范围,用于满足不同应用场景的需求。
OMRONPLC通信协议的实现方式主要有两种:点对点通信和多点通信。
点对点通信是指一台OMRONPLC与一台上位机之间建立独立的通信连接,通过指令和数据交换实现通信。
而多点通信是指一台OMRONPLC与多台上位机之间建立共享的通信连接,可以同时与多台上位机进行数据交换和远程控制。
在OMRONPLC通信协议的应用中,通常需要先进行通信参数配置和连接设置,然后根据协议规范编写相应的通信程序。
通信程序通常包括发送和接收数据的指令、数据格式的转换和解析等部分。
通过编写和调试通信程序,可以实现与OMRONPLC之间的有效通信和数据交换。
总之,OMRONPLC通信协议是实现与OMRONPLC之间通信的一种标准协议,它具有丰富的功能、稳定的性能和广泛的适用性。
通过选择合适的通信协议和编写相应的通信程序,可以实现高效、可靠的数据传输和设备控制,提升工业自动化系统的效率和可靠性。
1. 通讯协议
1.1 通讯设置:
数据格式:
起始位+ 8 位数据位+ 1位停止位,奇校验;
波特率:
19200 baud
1.2 50E向上位机发送的实时数据:
发送数据:5字节格式,每秒钟60个包,第7位为同步位。
发送数据:每3个字节为1包,前3包发送的数据为存储开始的时间,以后的为存储的脉率和血氧值。
1.3.1 发送时间的协议
1.3.2 发送数据的协议
发送数据:每3个字节为1包。
格式:存储开始的时间(3包) +存储的字节数(1包)+ 存储的脉率和血氧值;
1.3.1 发送时间的协议
1.3.2 发送存储的字节数的协议
1.3.2 发送数据的协议
1.4 上位机向50E发送的命令:。
上位机 eap通讯协议
EAP(Extensible Authentication Protocol,可扩展认证协议)是一种网络通信协议,常用于上位机与设备之间的身份认证和安全验证。
EAP协议提供了一种灵活的框架,可以在不同的网
络环境和认证方法中进行扩展和定制。
EAP协议的通信流程一般如下:
1. 上位机向设备发送认证请求。
2. 设备收到认证请求后,回复认证响应。
3. 上位机和设备之间进行认证交互,请求和响应之间传递认证信息。
4. 上位机根据认证交互结果,决定是否继续进行认证或断开连接。
EAP协议支持多种认证方法,包括:
1. EAP-MD5:使用 MD5 哈希算法进行认证;
2. EAP-TLS:基于证书的认证方法,使用公钥加密技术;
3. EAP-PEAP:基于EAP-TLS,通过TLS通道进行安全认证;
4. EAP-TTLS:类似于EAP-PEAP,但支持多种内部认证协议;
5. EAP-SIM:用于SIM卡认证的EAP方法;
6. EAP-AKA:用于3G手机网络中的 AKA(Authentication
and Key Agreement)认证。
上位机和设备之间的具体EAP通讯协议取决于他们的具体需
求和使用环境,可以根据需要选择适当的EAP认证方法和协议。
上位机和下位机的通讯协议随着信息技术的发展,计算机系统在各个领域中的应用越来越广泛。
在许多实际应用中,需要将上位机和下位机进行通信,以完成数据的传输和控制。
上位机和下位机是指在一个系统中,上位机负责处理数据和控制逻辑,而下位机则负责执行具体指令和操作硬件设备。
两者之间的通信协议起着非常重要的作用,它决定了数据的传输方式、格式和规则。
一种常见的上位机和下位机通信协议是Modbus协议。
Modbus 协议是一种串行通信协议,被广泛应用于工业自动化领域。
它定义了上位机和下位机之间的通信格式和规则,支持多种物理传输介质,如串口、以太网等。
Modbus协议采用主从结构,上位机作为主机发送指令,下位机作为从机接收并执行指令。
在Modbus协议中,上位机可以向下位机发送读取命令,以获取下位机的数据;也可以发送写入命令,以向下位机发送控制指令。
下位机接收到上位机的命令后,根据指令的类型和参数进行相应的处理,并将结果返回给上位机。
除了Modbus协议,还有其他许多通信协议可用于上位机和下位机的通信,如CAN总线协议、RS485协议等。
这些协议各有特点,适用于不同的应用场景。
CAN总线协议是一种广泛应用于汽车电子领域的通信协议。
它采用分布式的总线结构,可以连接多个下位机设备。
CAN总线协议具有高速传输、抗干扰能力强等优点,适用于复杂的汽车电子控制系统。
RS485协议是一种串行通信协议,适用于多点通信。
它可以连接多个下位机设备,支持长距离传输,具有抗干扰能力强的特点。
RS485协议广泛应用于工业自动化、楼宇自控等领域。
除了这些通信协议,还有许多其他的协议可供选择,如Profibus、DeviceNet等。
这些协议根据不同的应用场景和需求,提供了丰富的功能和灵活的配置。
在设计上位机和下位机通信协议时,需要考虑以下几个方面:1. 通信速度:根据实际需求确定通信速率,以保证数据的及时传输。
2. 数据格式:确定数据的编码格式和传输方式,以确保数据的正确解析和处理。