履带式地面移动机器人动力学模型分析(1)
- 格式:pdf
- 大小:1.32 MB
- 文档页数:6
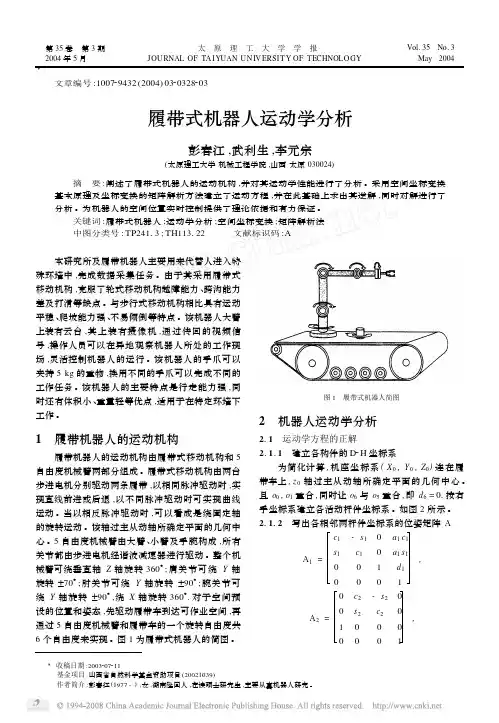
第一章绪论1.1课题研究的背景及意义履带车辆本身是非常复杂的机械系统,其显著特点是行动部分采用履带行驶装置,履带是在发明车轮之后又一重大突破,履带装置将车辆从传统的“线”的活动范围改良为“面”的活动范围,使得在复杂多变的使用环境中履带车辆的野外行驶能力,越障能力和机动性能都得到保证。
随着现代履带车辆对机动性要求不断提高,车辆在斜坡行驶、软地急转弯等恶劣工况行驶过程中耙齿、脱轮现象时有发生,使得车辆丧失机动性,陷入“瘫痪”状态,直接影响了车辆的行驶通过性和作战任务等。
现代军用履带车辆的发展总趋势是要求在降低车辆功耗的同时又要提高履带在链环上的稳定性[1],以防止履带发生耙齿、脱轮现象。
这不仅是提高车辆机动性的保证,而且可以改善车辆行驶平稳性和乘员的舒适性。
因此对履带车辆行动系统动力学研究具有重要的实际意义。
本课题来源于“十二五”预研项目:“履带车辆行动系统高速啮合技术研究”,论文的重点是履带装甲车辆行动部分动力学分析研究。
以特定类型履带装甲车辆为研究对象,以探究履带式车辆脱轮问题为出发点,着重研究履带装置各部件作用机理,并建立履带装置张紧力的数学模型和履带车辆的多体动力学模型,进行不同工况下的仿真分析。
论文针对车辆典型行驶工况中脱轮问题进行重点分析,为提高履带车辆行驶性能和对脱轮问题的理论研究提供参考。
通过建立履带装置张紧力的数学模型,达到对张紧力控制的目标,通过控制履带张紧力,防止履带耙齿、脱轮现象发生;同时建立履带车辆的多体动力学模型,并且进行不同工况下的仿真,将结果与计算数据对比,以此来论证数学模型的准确程度,并且分析不同工况下履带受力状况,对提高履带行驶系统的设计水平及防止脱轮现象发生具有重要意义,为保持履带车辆的整车行驶性能良好提供了很大帮助,也为未来实现张紧力的控制提供理论基础。
1.2履带车辆行动部分的研究现状1.2.1履带行动部分介绍履带行动部分由主动轮、履带、负重轮、诱导轮、履带张紧装置、托带轮(或托边轮)、张紧轮及诱导轮补偿张紧机构等部件组成。
基于ADAMS 的履带式挖掘机越障动力学建模与分析秦仙蓉1 冯亚磊1 沈健花2 张 氢1 孙远韬11同济大学机械与能源工程学院 上海 201804 2惠普信息技术研发有限公司 上海 200131摘 要:履带式挖掘机作业时需跨越各类障碍物,在履带式挖掘机跨越障碍物时会受到来自地面的冲击载荷而产生疲劳破环,故研究履带式挖掘机的整机越障动力学特性十分必要。
基于动力学仿真软件ADAMS,研究了履带式挖掘机的整机越障动力学特性。
以某中型履带式挖掘机为例,在Pro/E 中完成履带式挖掘机的三维建模,在ADAMS 中建立其简化虚拟样机,完成该履带式挖掘机越障的动力学仿真。
结果表明:越障过程中,挖掘机车体垂向最大位移与障碍物设置高度一致,整个越障过程较为平稳。
此外,车体的转动角速度在车体越过障碍边缘到引导轮触地时刻存在较明显的变化过程。
关键词:履带式挖掘机;越障;动力学仿真;虚拟样机中图分类号:U446 文献标识码:A 文章编号:1001-0785(2023)05-0018-05Abstract: In view of the fact that crawler excavators need to cross all kinds of obstacles during operation, and are easily subjected to impact load from the ground, resulting in fatigue damage, it is necessary to study the dynamic characteristics of the whole crawler excavator crossing obstacles. In this study, based on the dynamic simulation software Adams, the dynamic characteristics of the whole crawler excavator are studied. Taking a medium-sized crawler excavator as an example, the three-dimensional modeling of the crawler excavator is completed in ProE, and its simplified virtual prototype is established in Adams, and the dynamic simulation of the crawler excavator crossing obstacles is completed. The results show that the vertical maximum displacement of the excavator body is consistent with the height of the obstacle during the obstacle crossing, and the body is relatively stable during the whole obstacle crossing. In addition, the rotation angular velocity of the excavator changes obviously, which occurs during the period when the excavator travels to the edge of obstacle crossing and the guide wheel touches the ground.Keywords: crawler excavator; obstacle crossing; dynamic simulation; virtual prototype0 引言挖掘机被广泛用在各类土石方开挖工程现场,据不完全统计,土石方施工过程中约60%的土石方开挖都是靠挖掘机来完成的。
机器人履带移动控制的力学问题研究随着科技的发展,机器人已经逐渐成为人们生活中不可或缺的一部分。
从工业生产到医疗保健,从教育培训到家庭服务,机器人的应用场景越来越广泛。
其中,机器人履带移动技术的发展已经逐渐成熟,成为机器人移动领域的一种重要方式。
在这样的背景下,对于机器人履带移动控制的力学问题进行研究,具有重要意义。
一、机器人履带移动技术的基本原理机器人履带移动技术利用履带作为机器人的移动器官,具有良好的通过性能,适应于复杂地形和恶劣环境下的移动任务。
与腿式机器人相比,履带式机器人可以具有更高的稳定性和较大载重能力,但相应的机械系统也更加复杂。
在机器人履带移动技术中,控制履带的转速和方向,是实现机器人移动的关键。
通过不同的控制方式,机器人可以进行直线移动、弧线移动、旋转等多种运动方式。
其中,直线移动时左右履带旋转速度相等,方向相反;旋转时左右履带的转速相反;弧线移动时,通过左右履带转速调整实现曲线运动。
二、履带移动机构的力学问题机器人履带移动机构由两个履带组成,每个履带由多个履带节组成,同时支撑机器人重量并提供牵引力。
因此,在探究机器人履带移动控制问题时,力学问题是必不可少的一部分。
在机器人履带移动中,力学问题主要包括摩擦力、牵引力和稳定性控制。
其中,摩擦力是指履带和地面之间的摩擦力,牵引力是机器人向前推进时产生的力,稳定性控制则是在不同地形下保持机器人平稳移动的问题。
针对这些力学问题,计算机模拟技术和实验研究是有效的解决途径。
通过建立履带移动力学模型,可以对机器人进行不同场景下的运动仿真,评估不同控制策略对机器人性能的影响;同时,实验数据也可以为机器人履带移动控制的算法和参数调整提供参考。
三、履带移动机构中的控制算法问题为了实现机器人履带移动的精确控制,涉及到的控制算法问题也逐渐受到重视。
在机器人履带移动控制算法中,主要有踏频控制、PID控制、模糊控制等多种技术应用。
其中,踏频控制是机器人履带移动的基础,它利用踏频控制方法控制履带的动作,实现机器人的前进、后退、转向等基本运动。
履带式移动机器人研究作者:闫守前来源:《中国机械·上半月》2019年第01期摘要:随着科学技术的进步和生产的发展,国民经济各部门要求不断提供先进的技术装备、研制新的产品品种,以满足国民经济继续发展和人民生活质量不断提高的需要。
机器人的出现解决了人们的疑难问题,为生活提供了方便。
本文认真研究了履带式机器人的稳定性,指出了履带式机器人研究中存在的问题。
关键词:履带式;机器人;稳定性1 机器人的特点分析1.1 稳定性分析履带是人类继发明车轮之后又跨出的一大步,扩展了车辆由“线”到“面”的活动范围,履带式车辆既加强了离开道路的越野能力,同时也增大了负重能力在越野及爬坡时的稳定性有了大大的提高。
履带式机器人的稳定性是指它保持稳定不倾翻、不下滑的性能。
履带式机器人的稳定性对机器人本身的结构安全有直接影响,此外还对机器人的操纵性能有直接的影响。
稳定性分析包括纵向稳定性分析和横向稳定性分析。
1.2 纵向稳定性履带式机器人的极限坡度角和极限下滑角是纵向稳定性的基本评价指標。
图1为履带式机器人的极限坡度角,在上坡时重心不能落在后履带轮的后面,否则就会向后倾覆。
由此可知,机器人的上坡极限坡度角αlim的值为:同样的道理,机器人的下坡极限坡度角的值为:式(2)中,L为机器人履带的接地长度。
履带式机器人的极限下滑角,指机器人停在坡道上不下滑时的最大坡度角。
极限下滑角的值为:1.3 横向稳定性履带式机器人的横向稳定性包括两个方面:沿行走装置下侧边缘的横向翻倾和行走装置沿横坡侧滑。
图2为履带式工作车辆在横向斜坡上稳定工作时的受力简图。
图2中,b为车辆履带接地宽度,B为车辆轨距,e为车辆重心离开纵向对称平面的偏移距离,Y1 , Y2为两履带的土壤垂直反力,Z1, Z2为土壤作用于两履带的平行于坡面的力,β为横坡角度。
当机器人处于临界状态接开始横坡翻倾时,右侧履带不再受力即垂直反力Y1=0,整个机器人的重量mg作用在左侧履带的下侧边缘,于是对Y2取矩有:由式(4)可得到车辆的横向极限坡度角为:当开始横坡下滑时,有:由式(6)可得到:其中,为履带式工作车辆的横向附着系数。
履带式移动机器人越障能力的研究一、本文概述随着科技的快速发展和智能化时代的到来,履带式移动机器人作为一种高效、灵活的移动平台,在军事侦察、灾害救援、物流配送、农业自动化等众多领域展现出巨大的应用潜力。
然而,面对复杂多变的地形环境,机器人的越障能力成为影响其性能的关键因素。
因此,对履带式移动机器人越障能力的研究具有重要的理论价值和现实意义。
本文旨在深入探讨履带式移动机器人在不同地形条件下的越障性能,通过理论分析和实验研究相结合的方法,为提升机器人的环境适应性和越障能力提供理论支持和实践指导。
文章首先介绍履带式移动机器人的基本结构和工作原理,然后重点分析影响其越障能力的关键因素,包括履带设计、动力性能、控制系统等。
在此基础上,文章将探讨如何通过优化机器人结构和改进控制算法来提高其越障能力。
本文还将关注履带式移动机器人在实际应用中可能遇到的问题和挑战,如复杂地形环境下的导航与定位、多机器人协同越障等。
通过综合研究和实践应用,本文旨在为推动履带式移动机器人技术的发展和应用提供有益参考。
二、履带式移动机器人的结构设计履带式移动机器人的结构设计是提升其越障能力的关键。
结构设计主要包括底盘设计、履带设计、驱动系统设计以及控制系统设计等方面。
底盘设计:底盘是履带式移动机器人的基础结构,需要承受机器人的重量以及越障时产生的冲击力。
因此,底盘设计需要考虑到强度、刚性和稳定性。
我们采用了高强度金属材料,通过合理的结构设计,实现了底盘的轻量化与坚固性之间的平衡。
履带设计:履带是机器人越障能力的重要体现。
我们设计的履带具有足够的宽度和深度,以提供足够的摩擦力,使机器人在各种地形上都能稳定行驶。
同时,履带的设计还考虑到了耐磨性和寿命,采用了耐磨材料,并通过优化履带齿形,提高了机器人的越障性能。
驱动系统设计:驱动系统是履带式移动机器人的动力来源。
我们采用了大功率电机,并通过合理的传动机构设计,实现了动力的有效传递。
同时,驱动系统还配备了防滑功能,当机器人遇到湿滑或松软地面时,能够自动调整驱动力,保证机器人的稳定行驶。
履带车辆的动力学运动学模型在探索履带车辆的动力学运动学模型时,我们将以人类的视角来描述这一过程。
履带车辆是一种特殊的交通工具,它具有独特的设计和机械结构,使其能够在各种地形条件下行驶。
让我们一起来了解它的动力学和运动学原理。
动力学是研究物体运动和力的学科,而运动学则研究物体的运动状态和轨迹。
履带车辆的动力学运动学模型涉及到其推进力、摩擦力、速度和加速度等因素。
履带车辆的推进力是使其前进的关键。
它通常由发动机提供,通过传动系统传递到履带上。
这种推进力可以通过控制油门来调节,从而改变车辆的速度。
当油门增加时,发动机输出的功率增加,推进力也会增加,车辆加速前进。
摩擦力是履带车辆运动中一个重要的因素。
摩擦力产生于履带与地面之间的接触面,它是使车辆能够在不滑动的情况下前进的关键。
摩擦力的大小取决于地面的粗糙程度和履带的材质。
当地面较滑时,摩擦力较小,车辆容易打滑;而当地面较粗糙时,摩擦力较大,车辆能够更好地抓地。
速度和加速度是描述履带车辆运动状态的重要指标。
速度是指车辆在单位时间内前进的距离,可以用公里/小时或米/秒来表示。
加速度则是指车辆在单位时间内速度的变化量,可以用米/秒²来表示。
通过控制推进力的大小和方向,可以改变车辆的速度和加速度。
在履带车辆的动力学运动学模型中,还要考虑到其他因素的影响,如车辆质量、车辆的阻力和地形的坡度等。
车辆质量越大,需要更大的推进力才能使其前进;而阻力越大,车辆的速度和加速度就会受到更大的影响;地形的坡度也会对车辆的前进产生影响,车辆在上坡时需要更大的推进力,而在下坡时则可能需要制动力来控制速度。
履带车辆的动力学运动学模型是一个复杂而又有趣的领域。
通过对推进力、摩擦力、速度和加速度等因素的研究,我们可以更好地理解和控制履带车辆的运动行为。
这不仅有助于改进车辆的设计和性能,还为我们探索更广阔的交通工具领域提供了有益的启示。
ISSN 100020054CN 1122223 N 清华大学学报(自然科学版)J T singhua U niv (Sci &Tech ),2006年第46卷第8期2006,V o l .46,N o .89 36137721380履带式移动机器人动力学模型及其反馈控制李 岩, 杨向东, 陈 恳(清华大学精密仪器与机械学系,制造工程研究所,北京100084)收稿日期:2005207213基金项目:燕山石化履带式油罐检测爬壁机器人研制项目作者简介:李岩(19812),男(汉),河北,硕士研究生。
E 2m ail :yan 2li 03@m ails .tsinghua .edu .cn通讯联系人:杨向东,副教授,E 2m ail :yangxd @tsinghua .edu .cn摘 要:履带结构被广泛地应用在移动式机器人的设计当中。
为提高其反馈控制模型的精度,该文详细分析了履带式机器人的受力特点,提出了一种适于进行控制器设计的履带机器人模型,并在此基础上,按照反馈线性化的思想,提出了一种履带式机器人稳定路径跟踪控制器的设计方法,同时给出了方法的非奇异条件。
该文提出的控制系统模型和路径跟踪方法,为履带式机器人控制系统设计提供了理论依据。
关键词:履带式机器人;滑动操纵模型;反馈线性化中图分类号:T P 24文献标识码:B文章编号:100020054(2006)0821377204D ynam ics m odel and feedback con trol oftracked robotsL I ya n ,Y ANG Xia ngdong ,CHEN He n(I n stitute of manufactur i ng Eng i neer i ng ,D epart men t of Prec ision I n stru men ts and M echanology ,Tsi nghua Un iversity ,Be ij i ng 100084,Chi na )Abstract :T he pedrail has been w idely app lied to the design of the mobile robo t .To i m p rove the accuracy of its feedback contro lmodel,th is article detailedly analyzes the fo rce characteristics of the tracked robo t,and p ropo ses a k ind of tracked robo t model that is suitable fo r the design of the contro ller .O n the basis of this model,a m ethod of designing a steady path tracing contro ller fo r tracked robo t is p ropo sed acco rding to the idea of feedback linearizati on,and m eanw hile the conditi ons to avo id singularities is indicated also.T he contro l model and the path tracing m ethod p ropo sed p rovide the theo ry basis fo r the design of the tracked robo t contro l system.Key words :tracked 2robo t;ski p 2steeringmodel;feedbacklinearizati on履带结构以其优良的移动性能,被广泛应用在机器人设计当中[12]。
履带行走机构的运动学和动力学一、履带行走机构的运动学履带行走机构在水平地面的直线运动,可以看成是台车架相对于接地链轨的相对运动和接地履带对地面的滑转运动(牵连运动)合成的结果。
当履带相对地面没有滑转运动时,根据相对运动的原理,台车架相对接地链轨的运动速度与链轨相对于台车架的运动速度数值相等,方向相反。
因此,可以通过考察链轨对静止的台车架的运动来求取两者之间的相对运动速度。
此时履带在驱动轮的带动下以一定的速度围绕着这些轮子作“卷绕”运动(图1-2)。
由于履带链轨是由一定长度的链轨节所组成的,如通常的链传动一样,履带的卷绕运动速度即使在驱动轮等速旋转下,亦不是一常数。
从图1-2中可以看到,当履带处于图中1所示的位置时,履带速度达最大值,并等于:式中:—驱动链轮的节圆半径;当履带处于图中2所示的位置时,履带速度最低,等于:式中:—驱动链轮的分度角,; —驱动链轮的有效啮合齿数。
由此可见,即使驱动轮作等角速旋转(为常数),台车架的相对运动也将呈现周期性的变化,从而使车辆的行驶速度也带有周期变化的性质。
履带卷绕运动的平均速度可通过驱动轮每转一圈所卷绕(转过)的链轨节的总长来计算。
0r βK Z 360=βK Z K ω设:—链轨节矩,m ;—驱动轮转速,r/min 。
则履带卷绕运动的平均速度可由下式计算:当履带在地面上作无滑动行驶时,车辆的行驶速度显然就等于台车架相对于接地链轨的运动速度,后者在数值上等于履带卷绕运动的速度。
通常,将车辆履带在地面上没有任何滑移时,车辆的平均行驶速度称为理论行驶速度,它在数值上应等于履带卷绕运动的平均速度,亦即:由(1-4)可增加时,则履带卷绕运动速度的波动就减小。
为了简化履带行走机构运动学的分析,通常将这种极限状态作为计算车辆行驶速度的依据。
此时,假设履带节为无限小,且相对于驱动轮无任何滑动。
根据上述假设,履带就具有图1-4所示的形状。
当驱动轮齿数相当多时,此种假设是可以容许的。