电子秤电路设计
- 格式:docx
- 大小:11.79 KB
- 文档页数:3
基于STM32F1单片机的电子秤的设计1.本文概述随着技术的进步和电子技术的普及,电子秤已成为日常生活和工业生产中不可或缺的工具。
与传统的机械秤相比,电子秤具有更高的测量精度、更强的功能性和更广泛的应用范围。
本文旨在设计一种基于STM32F1单片机的电子秤。
该设计不仅专注于电子秤的称重和单位转换等基本功能,而且通过使用STM32F1微控制器,赋予电子秤更智能的功能,如数据存储、传输和用户界面交互。
文章首先介绍了STM32F1单片机的特点和适用性,然后详细阐述了电子秤的设计原理、硬件选择和软件实现。
本文还包括对系统的测试结果和分析,以验证设计的有效性和可靠性。
通过本文的研究和设计,有望为电子秤领域提供一种创新实用的解决方案。
2.系统设计原则在这种电子秤的设计中,STM32F1微控制器作为核心控制器,其重要性体现在以下几个方面:处理能力:STM32F1系列微控制器基于ARM CortexM3内核,具有强大的处理能力和高效的能耗比。
其最大工作频率可达72MHz,足以处理电子秤所需的复杂计算和数据传输任务。
集成:该系列微控制器集成了丰富的外围接口,如ADC(模数转换器)、UART(通用异步收发器)、I2C(集成电路总线)等。
这些接口对电子秤的设计至关重要。
稳定性和可靠性:STM32F1微控制器具有优异的抗干扰能力和稳定性,适用于工业应用,确保了电子秤在复杂环境中的准确性和可靠性。
电子秤的核心部件是传感器,用于将物体的重量转换为电信号。
在该设计中,选择了压力传感器作为主要测量元件。
传感器的工作原理是基于弹性变形。
当物体受到压力时,传感器内部的电阻应变计变形,从而改变电阻值并通过惠斯通电桥将其转换为电压信号。
信号放大和滤波:传感器输出的模拟信号通常较弱,需要通过信号放大器进行放大。
为了提高信号质量,设计了滤波电路来去除噪声,保证信号的准确性。
模数转换:通过STM32F1微控制器内置的ADC将放大后的模拟信号转换为数字信号,使微控制器易于处理和计算。
目录第一节绪论 (3)1.1本设计的任务和主要内容 (3)第二节硬件电路设计 (4)2.1传感器的选择 (4)2.1.1应变式电阻传感器的测量原理 (4)2.1.2传感器的分类和选择 (4)2.2放大电路的设计 (5)2.3采集电路的设计 (5)2.3.1数据采集系统的组成 (5)2.3.2数据采样保持器 (6)2.3.3 A/D转换器 (6)2.4显示电路的设计 (7)2.5键盘电路的设计 (8)2.6报警电路的设计 (9)第三节软件的设计 (9)3.1监控程序的设计 (9)3.2数据处理子程序的设计 (9)3. 2.1数制转换 (9)3.3数据采集子程序的设计 (10)3.4数据显示子程序的设计 (11)3.5键盘扫描子程序的设计 (12)3.6报警子程序的设计 (13)第四节设计总结 (15)参考书籍 (1)6程序附图..............................................................................17电子秤的设计数理与信息工程学院电信041班黄伟东指导老师余水宝第一节绪论随着时代科技的迅猛发展微电子学和计算机等现代电子技术的成就给传统的电子测量与仪器带来了巨大的冲击和革命性的影响常规的测试仪器仪表和控制装置被更先进的智能仪器所取代使得传统的电子测量仪器在远离、功能、精度及自动化水平定方面发生了巨大变化并相应的出现了各种各样的智能仪器控制系统使得科学实验和应用工程的自动化程度得以显著提高做为重量测量仪器智能电子秤在各行各业开始显现其测量准确测量速度快易于实时测量和监控的巨大优点并开始逐渐取代传统型的机械杠杆测量称成为测量领域的主流产品本文设计的电子秤以单片机为主要部件用汇编语言进行软件设计硬件则以半桥传感器为主测量0~500g电子秤随时可改变上限阈值并达到阈值报警的功能称重传感器输出的电量是模拟量数值比较小达不到A/D转换接收的电压范围所以送A/D转换之前要对其进行前端放大、整形滤波等处理然后A/D转换的结果才能送单片机进行数据处理并显示其数据显示部分采用LCD显示成本低且能很好地实现所要求的功能1.1本设计的任务和主要内容设计的主要内容如下(1)设计一款电子秤用LED液晶显示器显示被称物体的质量(2)可以设定该秤所称的上限(3)当物体超重时能自动报警(4)写出详细的实验报告第二节电子秤的硬件设计2.1 传感器的选择2.1.1应变式电阻传感器的测量原理应变式电阻传感器的工作原理:当导体或半导体受到外力作用时会产生机械变形从而导致阻值变化导体与半导体的电阻与电阻率及其几何尺寸有关当导体受外力作用时电阻率及几何尺寸的变化会引起电阻的变化因此通过测量电阻值的大小就可以反映外界力的大小电阻型应变片传感器的测量电路可采用桥式测量电路桥式测量电路有四个电阻其中任何一个电阻均可以是应变片图2.1.1 桥式测量电路图如能恰当的选择个桥臂的电阻可以消除电桥的恒定输出使输出电压只与应变片的电阻有关2.1.2传感器的分类和选择应变片式电阻传感器按其测量电路(桥式)可分为单臂式、半桥式、全桥式三种所谓半桥即将电桥的四臂接入四应变片其中:一片受拉一片受压另外两应变片不受力全桥是两片受拉两片受压故灵敏度比半桥式的大一倍本方案采用半桥式传感器2.2 放大电路的设计传感器输出电压为毫伏级而A/D转换器所能处理的电压是0~5V所以必须在A/D转换器前加入一个前置差动放大电路以实现电压的放大放大倍数为100~200倍使输出电压为0~5V由于单运放在应用中要求外围电路匹配精度高、增益调整不便、差动输入阻抗低故采用三运放结构三运放结构具有差动输入阻抗高、共膜抑制比高、偏置电流低等优点且有良好的温度稳定性低噪单端输出和和增益调整方便适于在传感器电路中应用如图3-2所示图中为增益调节电阻整个芯片仅为外接电阻而运放为增益为1的差动输入放大器图2.2.1 放大电路硬件原理图2.3采集电路的设计2.3.1数据采集系统的组成数据采集系统的核心是计算机他对整个系统进行控制和数据处理他由采样/保持器放大器A/D转换器计算机组成2.3.1 数据采样系统框图2.3.2数据采样保持器进行模数变换时从启动变换到变换结束的数字量输出需要一定的时间即A/D转换的孔径时间当输入信号频率较高由于孔径时间的存在会造成较大的转换误差;为了防止误差需在中间加一个功能器件采样/保持器进行有效、正确的数据采集采样/保持器通常由保持电容器、模拟开关和运算放大器组成其中对于低速场合可以采用继电器作为开关以减小开关漏电流的影响;在高速场合也可以用晶体管、场效应管来作为开关采样保持器的原理:如图当开关闭合时V1通过限电流电阻向电容C充电在电容值合理的情况下V0随Vi的变化而变化;当K断开时由于电容C有一定的容量此时输出V0保持输入信号再开断开瞬间的电平值图2.3.2 采样保持原理图在模拟信号输入通道中是否需要加采样/保持器取决于模拟信号的变化频率和A/D转换器的孔径时间;对快速过程信号当最大孔径误差超过允许值时必须在A/D转换器前加采样/保持器但如果输入模拟量是直流量或者被测信号模拟量随时间变化非常缓慢采样/保持(S/H)电路可以省去2.3.3 A/D转换器设计中A/D转换器用的是ADC0809 A/D转换器它是8路8位逐次逼近式转换器结果为8位二进制数据转换时间短(一般在级)满足题目要求的"实时采样"并且它的转换精度在0.1%上下比较适中适用于一般场合由图2.3.3可见单片机通过读控制线WR和0809片选线控制启动A/D转换及输入通道地址锁存写控制线WR与ADC0809片选线控制输出允许由于ADC0809具有通道地址锁存功能通道选择ADD.A、ADD.B、ADD.C直接接单片机的数据口模拟电压由IN0通道输入A/D采样电压在0~5v之间变化所模拟通道IN0地址口为0AOOOH但是ADC0809无内置时钟所以CLOCK由外部时钟信号控制图2.3.3 A/D转换器和单片机的接口电路2.4 显示电路的设计显示部分可以将处理得出的信号在显示器上显示让人们直观的看到被测体的质量也可以进行报警提示LCD液晶显示器是一种极低功耗显示器从电子表到计算器从袖珍时仪表到便携式微型计算机以及一些文字处理机都广泛利用了液晶显示器本设计采用的显示模块是128×64点阵的汉字图形型液晶显示模块可显示汉字及图形内置8192个中文汉字(16X16点阵)、128个字符(8X16点阵)及64X256点阵显示RAM(GDRAM)可与CPU直接接口提供两种界面来连接微处理机:8-位并行及串行两种连接方式具有多种功能:光标显示、画面移位、睡眠模式等2.5 键盘电路的设计利用键盘可选择电子秤工作模式、设定测量上限等键盘部分采用矩阵式的键盘采用这种结构的特点是把检测线分为两组一组为行线一组为列线按键放在行线和列线的交叉点上矩阵式的键盘的优点是需要的测试线的数量少对于一个M×N的矩阵键盘与主机连接只需要M+N条测试线这样键盘的规模越大矩阵时键盘的有点越显著当需要的按键数目大于8时一般都采用矩阵式键盘图 2.5.1 矩阵式键盘结构图2.6 报警电路的设计报警电路是超过设定的范围单片机输出信号驱动蜂鸣器发声警报如图所示当BDLL端为低电平时有电流通过蜂鸣器蜂鸣器报警反之不报警这里设定当超过质量的上限时通过软件使8031的P1.0口清零再过P1.0口出来的低电平信号连接到BELL端蜂鸣器发声报警图2.6.1 报警电路第三节电子秤的软件设计3.1监控程序的设计智能仪器的设计既要满足设定的功能的完成如计算等功能的任务功能程序也要有可以监控仪器仪表正工作保证其可靠性方面的监控程序整个智能仪器的测量都是智能仪器自动完成的所以设计一套功能完备的监控程序是必须的也是必要的监控程序的主要作用是实时的响应来自系统的各种信息按信息的类别进行处理;当系统出现故障时能自动的采取有效的措施消除故障保证系统能够继续进行正常工作3.2 数据处理子程序的设计数据处理子程序是整个程序的核心主要用来调整输入值系数使输出满足量程要求另外完成A/D的采样结果从十六进制数向十进制数形式转化3.2.1系数调整在IN0输入的数最大为5V要求的质量500g对应的是4.8V为十六进制向十进制转换方便将系数放大100倍并用小数点位置的变化体现这一过程因而系数为:3.2.2数制转换数制之间的转换:在二进制数制中每向左移一位表示数乘二倍以每四位作为一组对数分组当第四位向第五位进位时数由8变到16若按十进制数制规则读数则丢失6所以应进行加六调整DA指令可完成这一调整可见数制之间的转换可以通过移位的方法实现其中移出数据的保存可以通过自乘再加进位的方法实现因为乘二表示左移一位左移后低位进一则需加一否则加零而通过移位已将要移入的尾数保存在了进位位中所以能实现图3.2.2 数据处理原理框图3.3 数据采集子程序的设计数据采集用A/D0809芯片来完成主要分为启动、读取数据、延时等待转换结束、读出转换结果、存入指定内存单元、继续转换(退出)几个步骤ADC0809初始化后就具有了将某一通道输入的0~5模拟信号转换成对应的数字量00H-FFH然后再存入8031内部RAM的指定单元中在控制方面有所区别可以采用程序查询方式延时等待方式和中断方式图3.3.1 数据采样原理框图3.4显示子程序的设计显示子程序是字符显示首先调用事先编好的8279的键盘显示子程序调用8279初始化命令然后输出写显示命令在显示过程中一定要调用延时子程序当输入通道采集了一个新的过程参数或仪表操作人员键入一个参数或仪表与系统出现异常情况时显示管理软件应及时调用显示驱动程序模块以更新当前的显示数据显示符号图3.4.1 显示原理框图3.5 键盘扫描子程序的设计如图3.4.1所示:键盘电路设计成4X4矩阵式由键盘编码方式可以得出0123456789ABCDEF各键对应的键值:0D8H0D0H0D1H0D2H0C8H0C9H0CAH0C0H0C1H0C2H0C3H0CBH0D3H0DBH0DAH0D9H在程序中可以先判断按键编码然后根据编码将键盘代表的数值送到相应的存储单元再进行功能选择或数据处理图3.5.1键盘扫描原理框图3.6报警子程序的设计由于要求要键盘设定阈值所以要求有报警电路报警电路可以有声报警也可有光报警将设定的阈值与实时显示的值进行比较如果设定值小于实时显示的值则将P1.0置为1将发光二极管点亮或使蜂鸣器发出声音这就需要一段比较程序以及一小段置1清0程序图3.6.1 报警原理框图第四节设计总结随着集成电路和计算机技术的迅速发展使电子仪器的整体水平发生巨大变化传统的仪器逐步的被智能仪器所取代智能仪器的核心部件是单片机因其极高的性价比得到广泛的应用与发展从而加快了智能仪器的发展而传感器作为测控系统中对象信息的入口越来越受到人们的关注传感器好比人体"五官"的工程模拟物它是一种能将特定的被测量信息(物理量、化学量、生物量等)按一定规律转换成某种可用信号输出的器件或装置本次课设中的半桥电子秤就是在以上仪器的基础上设计而成的因此只有充分了解有关智能仪器、单片机、传感器以及各部分之间的关系才能达到要求首先是传感器的精密度它将直接影响电子秤的称重准确度课设时由于传感器发出的信号不是很稳定所以称重时误差很大如果使用精密度较高的传感器效果会好的多其次是数据采集处理阶段此阶段是对传感器发出的信号进行量化、采集主要分为信号放大、采集然后进行A/D转换该阶段需注意的地方是对传感器输出的信号进行放大时应选取合适的运算放大电路最好是预先计算好应放大的倍数以便选取还有就是进行数据处理时选取适当的数据转换系数使输出满足量程要求参考文献1.赵茂泰.智能仪器原理及应用.电子工业出版社2004:2.张毅刚.MCS-51单片机应用设计.哈尔滨工业大学出版社2003:3.贾伯年俞朴.传感器技术.东南大学出版社2000:4.单成祥.传感器理论设计基础及其应用.国防工业出版社1999:5.李道华李玲朱艳.传感器电路分析与设计.武汉大学出版社2000:程序附图定义中文LCD液晶 128X64 的地址W_C_GLCD XDATA 0E000HW_D_GLCD XDATA 0E001HR_B_GLCD XDATA 0E002HR_D_GLCD XDATA 0E003H;------------------------------------------------------- TIMER0 DATA 30H ;延时时间的初值TIMER1 DATA 31H ;调用延时子程序的次数DATA1 DATA 32H ;点阵显示的变量1DATA2 DATA 33H ;点阵显示的变量2X DATA 34H ;X方向的位置Y DATA 35H ;Y方向的位置COUNTER DATA 36H ;计数器N DATA 37H ;行数变量D1 DATA 38H ;点变量1D2 DATA 39H ;点变量1ADDR DATA 3AH ;起始的显示位置ADDR1 DATA 3BH ;起始的显示位置临时变量N1 DATA 3CH ;行数的临时变量;******************************************************* ;* 主程序开始;******************************************************* ORG 0000HAJMP STARTORG 0030HSTART: CLR P1.0SETB P1.1MOV SP#60HLCALL INITIAL_GLCD ; 调用LCD初始化LCALL KAIJI ; 显示开机画面LCALL DELAY500LCALL DELAY500LCALL DELAY500LCALL TISHI ; 显示主界面LCALL INI_8279------------------------------------------------;判断是否继续------------------------------------------------------------------ KEY-A: MOV DPTR#8101HMOVX A@DPTRANL A#07HCJNE A#00HLP1SJMP KEY-AMOV DPTR@8100HMOVX ADPTRCJNE A0DBHKEY-AAJMP K1LCALL YUZHILCAL celianjieguoLCALL CELINGJIEGUOAJMP $各界面显示内容DHTABLE1: DB " 欢迎使用 "DHTABLE2: DB " 半桥电子秤"DHTABLE3: DB " ********* "DHTABLE4: DB " ********* "DHTABLE5: DB " *********** "DHTABLE6: DB " 设置警报上限 "DHTABLE7: DB " 确定 "DHTABLE8: DB " 请按D 键 "DHTABLE9: DB " "DHTABLE10: DB " 报警上限重量: "DHTABLE11: DB " . g "DHTABLE12: DB " 确定(E) "CELIANG1: DB " 电子秤 "CELIANG2: DB " 重量是: "CELIANG3: DB "CELIANG4:DB " 返回 (F) ";======================================================= ;开机界面子程序;======================================================= KAIJI: MOV ADDR1#00H ; 第一行显示MOV N1#08H ; 数量 8 个MOV DPTR#DHTABLE1 ; 需要显示的汉字位置CALL DHZ ; 调用汉字子序MOV ADDR1#10H ; 第二行显示MOV N1#08HMOV DPTR#DHTABLE2CALL DHZMOV ADDR1#08H ; 第三行显示MOV N1#08HMOV DPTR#DHTABLE3CALL DHZMOV ADDR1#18H ; 第四行显示MOV N1#08HMOV DPTR#DHTABLE4CALL DHZRET;======================================================= ;提示界面子程序;======================================================= TISHI: LCALL CLEAR_GLCD ; 清除LCD显示屏幕MOV ADDR1#00HMOV N1#08HMOV DPTR#DHTABLE5CALL DHZMOV ADDR1#10HMOV N1#08HMOV DPTR#DHTABLE6CALL DHZMOV ADDR1#08HMOV N1#08HMOV DPTR#DHTABLE7CALL DHZMOV ADDR1#18HMOV N1#08HMOV DPTR#DHTABLE8CALL DHZRETSHEDING: LCALL CLEAR-GLCDMOV ADDR1#00HMOV N108HMOV DPTR#DHTALBE9CALL DHZMOV ADDR1#10HMOV N108HMOV DPTRCALL DHZMOV ADDR1#08HMOV N108HMOV DPTR#DHTALBE11CALL DHZMOV ADDR1#18HMOV N108HMOV DPTR#DHTALBE12CALL DHZRET测量界面子程序Celiangjieguo: LCALL CLEAR_GLCD ; 清除LCD显示屏幕MOV ADDR1#00HMOV N1#08HMOV DPTR#DHTABLE1CALL DHZMOV ADDR1#10HMOV N1#08HMOV DPTR#DHTABLE2CALL DHZMOV ADDR1#08HMOV N1#08HMOV DPTR#DHTABLE3CALL DHZMOV ADDR1#18HMOV N1#08H#DHTABLE4CALL DHZEND1坏人固然要防备,但坏人毕竟是少数,人不能因噎废食,不能为了防备极少数坏人连朋友也拒之门外。
电子秤电路设计课程设计一、教学目标本课程旨在让学生了解和掌握电子秤电路设计的基本原理和方法,通过学习使学生能够运用电子秤电路知识解决实际问题。
具体的教学目标如下:1.知识目标:(1)了解电子秤的原理和结构;(2)掌握电子秤电路的基本组成部分及工作原理;(3)熟悉常用电子秤电路的设计方法。
2.技能目标:(1)能够分析电子秤电路图,理解各个部分的功能;(2)能够运用所学知识设计简单的电子秤电路;(3)具备调试和优化电子秤电路的能力。
3.情感态度价值观目标:(1)培养学生对科学探究的兴趣和热情;(2)培养学生团队协作、积极进取的精神;(3)培养学生关注社会热点,将所学知识应用于实际生活的意识。
二、教学内容本课程的教学内容主要包括以下几个部分:1.电子秤概述:介绍电子秤的定义、分类和应用领域;2.电子秤电路原理:讲解电子秤电路的基本原理和组成部分,如传感器、放大器、滤波器等;3.电子秤电路设计:介绍电子秤电路的设计方法,包括硬件选型、电路图绘制等;4.电子秤电路调试与优化:讲解如何对电子秤电路进行调试和优化,以提高其性能和稳定性;5.实例分析:分析实际应用中的电子秤电路,让学生更好地理解所学知识。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行教学:1.讲授法:教师讲解电子秤电路的基本原理、设计方法和注意事项;2.讨论法:学生分组讨论电子秤电路设计中的问题,培养学生的团队协作能力;3.案例分析法:分析实际应用中的电子秤电路,让学生更好地理解所学知识;4.实验法:学生动手搭建和调试电子秤电路,提高学生的实践操作能力。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:选用《电子秤电路设计》教材,为学生提供系统性的理论知识;2.参考书:提供电子秤电路设计相关的参考书籍,丰富学生的知识储备;3.多媒体资料:制作课件、视频等多媒体资料,帮助学生更好地理解电子秤电路的设计过程;4.实验设备:准备电子秤电路实验套件,让学生能够动手实践,提高实际操作能力。
摘要随着计量技术和电子技术的发展,传统纯机械结构的杆秤、台秤、磅秤等装置逐步被淘汰。
而电子秤是将传感器技术、信息处理、电子技术等技术综合一体的现代新型称重仪器。
电子秤计量准确、快速方便,并且能实现自动称重和数字显示。
本作品主要以STC89C52单片机为控制核心,针对电子秤的自动称重、单价设置、金额计算与累加和去皮功能进行设计。
电子秤由六个功能模块组成,传感器模块、信号调理模块、单片机控制模块、报警模块、显示模块和按键模块。
本设计由电阻应变片桥式传感器进行数据采集,所得差模信号经HX711型芯片的放大和转换,再由单片机的控制和处理,最后在显示屏上显示重量、单价和金额等。
该设计很好的完成了设计要求,效率高,误差较小。
关键词:电子秤;STC89C52单片机;电阻应变片桥式传感器;HX711目录1 方案论证与比较......................................................................................................................1.1传感器模块方案....................................................................................................................1.2信号调理模块方案................................................................................................................1.3单片机控制模块方案............................................................................................................1.4显示模块方案........................................................................................................................1.5按键模块方案........................................................................................................................1.6报警模块方案........................................................................................................................ 2理论分析与计算.......................................................................................................................2.1电阻应变片传感器................................................................................................................2.2 HX711信号处理模块 ............................................................................................................2.3 STC89C52单片机控制模块...................................................................................................2.4 LCD1602显示 ........................................................................................................................2.5 4矩阵键盘........................................................................................................................3系统硬件设计...........................................................................................................................3.1 电阻应变片电桥电路...........................................................................................................3.2 HX711信号调理电路 ............................................................................................................3.3 单片机控制系统电路...........................................................................................................3.4显示电路与单片机接口电路................................................................................................3.5 按键电路与单片机接口电路...............................................................................................3.6蜂鸣器超重报警系统电路.................................................................................................... 4系统软件设计........................................................................................................................... 5系统调试...................................................................................................................................5.1测试方法与仪器....................................................................................................................5.1.1测试方法...........................................................................................................................5.1.2测试仪器...........................................................................................................................5.2数据测试与分析.................................................................................................................... 6总结........................................................................................................................................... 参考文献......................................................................................................................................1 方案论证与比较1.1传感器模块方案采用电阻应变片桥式传感器。
电子秤电路设计与制作实验报告姓名:学号:指导老师:通信与信息工程学院电子秤电路设计指导书一、实验目的:本实验要求学生设计并制作一个电子秤电路,要求能测量重量在0~200g 间的物体,输出为电压信号,通过调节电路使电压值为对应的重量值,电压量纲mv改为重量纲g即成为一台原始电子秤。
二、基本原理:基本思路总体设计思路如图1所示,所测重量经过转换元件转换为电阻变化,再经过测量电路转化为电压变化,经过放大电路放大调节后输出显示得到所需信号。
图1 基本设计思路电阻应变式传感器本设计主要通过电阻应变式传感器实现。
电阻应变式传感器是利用电阻应变片将应变转换为电阻的变化,实现电测非电量的传感器。
传感器由在不同的弹性敏感元件上粘贴电阻应变片构成,当被测物理量作用在弹性敏感元件上时,弹性敏感元件产生变形,并使附着其上的电阻应变片一起变形,电阻应变片再将变形转换为电阻值的变化。
应变式电阻传感器是目前在测量力、力矩、压力、加速度、重量等参数中应用最广泛的传感器之一。
1、弹性敏感元件物体在外力作用下而改变原来尺寸或形状的现象称为变形,而当外力去掉后物体又能完全恢复其原来的尺寸和形状,这种变形称为弹性变形。
具有弹性变形特性的物体称为弹性元件。
弹性敏感元件是指元件在感受到力、压力、力矩、振动等被测参量时,能将其转换成应变量或位移量,弹性敏感元件可以把被测参数由一种物理状态转换为另一种所需要的物理状态。
2、电阻应变片对于一段长为L,截面积为S,电阻率为ρ的导体,未受力时电阻为 R = ρ,在外力的作用下,电阻丝将会被拉伸或压缩,导体的长度L、截面积S以及电阻率ρ等均将发生变化,从而导致其电阻值发生变化,这种现象称为“电阻应变效应”。
利用金属或半导体材料电阻丝的应变电阻效应,可以制成测量试件表面应变的敏感元件。
为在较小的尺寸范围内感受应变,并产生较大的电阻变化,通常把应变丝制成栅状的应变敏感元件,即电阻应变片,通常由敏感栅、基底、盖片、引线和黏结剂等组成。
测控电路课程设计之电子秤的设计一、设计任务1、题目:电子秤的设计1.确定结构电子秤由传感器、传感器专用电源、信号放大系统、模数转换系统及显示器等五部分组成,其原理框图如指导书图4所示。
2.设计技术指标如下:1)量程为0~1.999Kg ,2)传感器可采用悬臂梁式的称重传感器(悬臂梁上贴有应变片)。
3) 显示电路采用213为A/D 转换电路、共阴级数码管。
2、设计任务1)选择传感器2)设计传感器测量电路:通常用电桥测量电路。
3)放大电路设计由于传感器测量范围是0~2Kg ,假定选择的某款传感器的灵敏度为1mV/V 、工作电压为10V ,那么其输出信号只有0-10mV 左右;而A/D 转换的输入应为0-1.999Kg ,当量为1mV/g ,因此要求放大倍数约为200倍,一般采用两级放大器。
另外,在电路设计过程,应考虑电路抗干扰环节、稳定性。
选择低失调电压、低漂移、高稳定、经济性的芯片。
最后,电路中还应有调零和调增益的环节,才能保证电子秤没有称重时显示零读数,称重时读数正确反映被秤重量。
4)模数转换及显示系统A/D 转换器可选择MC14433,也可另选。
4)供电电源:设计一个可满足本设计需求的电源。
二、设计方案1、电子秤的主要组成电子秤由传感器、传感器专用电源、信号放大系统、模数转换系统及显示器等五部分组成,其原理框图如图4所示。
图4电子秤组成框图传感器将被测物体的重量转换成电压信号输出,放大系统把来自传感器的微弱信号放大,放大后的信号经过模数转换把模拟数字量,数字量通过数字显示器显示重量。
2、方案的选用方案一:采用应变式电阻称重传感器,将被测物体的重量转换成电压信号输出,然后采用AD620差动电路放大器把来自传感器的微弱信号放大,然后将放大后的信号经过MC14433模数转换器转换成数字量,最后经过动态扫描将数字量通过数码管显示出来,显示出来的数字就是被测物体的重量。
方案二:设计以51系列单片机AT89S52为控制核心,实现电子秤的基本控制功能。
电子秤电路设计与制作实验报告姓名:学号:指导老师:通信与信息工程学院电子秤电路设计指导书一、实验目的:本实验要求学生设计并制作一个电子秤电路,要求能测量重量在0~200g 间的物体,输出为电压信号,通过调节电路使电压值为对应的重量值,电压量纲mv改为重量纲g即成为一台原始电子秤。
二、基本原理:基本思路总体设计思路如图1所示,所测重量经过转换元件转换为电阻变化,再经过测量电路转化为电压变化,经过放大电路放大调节后输出显示得到所需信号。
图1 基本设计思路电阻应变式传感器本设计主要通过电阻应变式传感器实现。
电阻应变式传感器是利用电阻应变片将应变转换为电阻的变化,实现电测非电量的传感器。
传感器由在不同的弹性敏感元件上粘贴电阻应变片构成,当被测物理量作用在弹性敏感元件上时,弹性敏感元件产生变形,并使附着其上的电阻应变片一起变形,电阻应变片再将变形转换为电阻值的变化。
应变式电阻传感器是目前在测量力、力矩、压力、加速度、重量等参数中应用最广泛的传感器之一。
1、弹性敏感元件物体在外力作用下而改变原来尺寸或形状的现象称为变形,而当外力去掉后物体又能完全恢复其原来的尺寸和形状,这种变形称为弹性变形。
具有弹性变形特性的物体称为弹性元件。
弹性敏感元件是指元件在感受到力、压力、力矩、振动等被测参量时,能将其转换成应变量或位移量,弹性敏感元件可以把被测参数由一种物理状态转换为另一种所需要的物理状态。
2、电阻应变片对于一段长为L,截面积为S,电阻率为ρ的导体,未受力时电阻为 R = ρ,在外力的作用下,电阻丝将会被拉伸或压缩,导体的长度L、截面积S以及电阻率ρ等均将发生变化,从而导致其电阻值发生变化,这种现象称为“电阻应变效应”。
利用金属或半导体材料电阻丝的应变电阻效应,可以制成测量试件表面应变的敏感元件。
为在较小的尺寸范围内感受应变,并产生较大的电阻变化,通常把应变丝制成栅状的应变敏感元件,即电阻应变片,通常由敏感栅、基底、盖片、引线和黏结剂等组成。
电子秤原理及电子秤原理图一、名词解释利用作用于物体上的重力来测量该物体质量(重量)的计量仪器,装有电子装置的秤为电子秤。
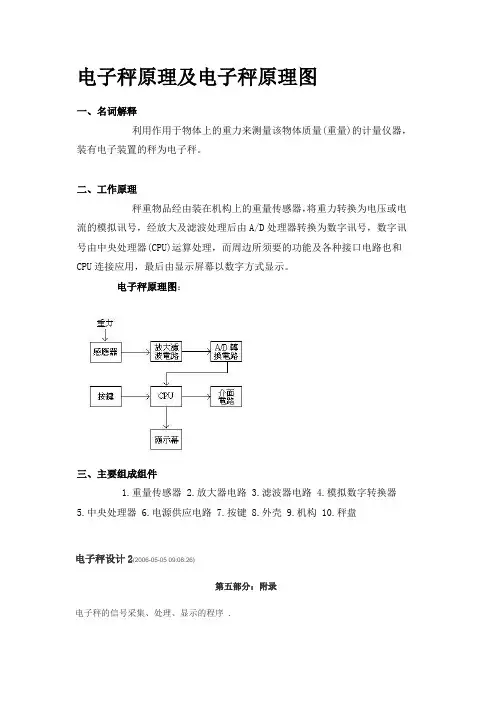
二、工作原理秤重物品经由装在机构上的重量传感器,将重力转换为电压或电流的模拟讯号,经放大及滤波处理后由A/D处理器转换为数字讯号,数字讯号由中央处理器(CPU)运算处理,而周边所须要的功能及各种接口电路也和CPU连接应用,最后由显示屏幕以数字方式显示。
电子秤原理图:三、主要组成组件1.重量传感器2.放大器电路3.滤波器电路4.模拟数字转换器5.中央处理器6.电源供应电路7.按键8.外壳9.机构 10.秤盘电子秤设计2(2006-05-05 09:08:26)第五部分:附录电子秤的信号采集、处理、显示的程序 .#include <reg52.h>#include<absacc.h>//ad 控制线#define ad_244 XBYTE[0xbfff];sbit ad_stb=P3^3;sbit ad_start=P1^1;//lcd 控制线sbit lcd_di=P1^7;sbit lcd_rw=P1^2;sbit lcd_e=P1^0;//7289 控制线sbit cs7289=P1^3;sbit clk7289=P1^4;sbit dio7289=P1^5;//sbit key7289=P1^6; //7289 查询方式sbit key7289=P3^2; //7289 中断方式sbit baoj=P3^5;//7289 子程序void ini_7289(void);void send7289(short);short receive(void);void keyin(void);//lcd 子程序void ini_lcd(void);void lcdd_send(short); void lcdi_send(short); void chk_busy(void);//ad 子程序void ad(void);void baojing(void);void d_change(long);// 初始化,编号,日期void ini();void error1(void);void nop1(){}void change(s)int dealy; // 全局变量short sh=0; // 商品号short dot=0; // 小数点标志bit list=0;short qb=0;char xdata shuju[7]=""; short xdata bcd[5];char xdata s1[16]=" 单价 : 元 ";char xdata s2[16]=" 重量 : Kg";char xdata s3[16]=" 金额 : 元 ";char xdata s4[16]=" 累计 : 元 ";char code message0[]=" 信息学院山东大学 ";char code message1[]=" 输入收银员代号 :";char code message2[]=" 输入日期 :";char code message3[16]=" -- 山东大学 -- ";char code message5[16]=" 垃圾公司欢迎您 !!";char xdata bianhao[16]=" 收银员: ";char xdata riqi[16]=" - - ";long int xdata zongjia=0,jine=0,jine1=0;int xdata shizhong=0,pizhong=0,zhongliang=0;long int xdata qingdan[20][4];char code shangpin[11][4]={{" 单价 "},{" 苹果 "},{" 梨 "},{" 花生 "},{" 大米 "}, {" 桃子 "},{" 塑料 "},{" 瓜子 "},{" 桔子 "},{" 香蕉 "},{" 玉米 "}};long int xdata danjia[11]={0,2,3635,5502,0,3320,5502,660,3210,6600,5600};char xdata jiage[6]={0x0,0x0,0x0,0xfe,0x0,0x0}; // 0.00short xdata xiuzheng[]={0,2,5,6,7,8,9,12,13};char s[16];{s[6]=shuju[0];s[7]=shuju[1];s[8]=shuju[2];s[9]=shuju[3];s[10]=shuju[4];s[11]=shuju[5];s[12]=shuju[6];}//**************************************************************** void main(){short i,j;long int x,z;int y;int xdata duilie[3]={0};P1=0xff;ini_lcd(); // 初始化 LCDlcdi_send(0x8a);while(message0[i]) lcdd_send(message0[i++]);ini_7289(); // 初始化 7289pizhong=ad1();lcdi_send(0x1); // 总清屏ini(); // 初始页面 , 收银员编号,日期lcdi_send(0x1); // 总清屏EA=1;EX0=1; // 中断//EX1=1;//ad_start=1;while(1){if(list){lcdi_send(0x80); // 显示单位名称for(i=0;i<16;i++) lcdd_send(message3[i]); x=qingdan[0][0]; // 商品名单价for(i=0;i<4;i++) s1[i]=shangpin[x][i];x=qingdan[0][1];d_change(x); change(s1);lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s1[i]);x=qingdan[0][2]; // 显示重量d_change(x); change(s2);s2[10]=s2[9];s2[9]='.';if(s2[8]==32) s2[8]=0x30;lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s2[i]);x=qingdan[0][3];d_change(x); change(s3);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(s3[i]); // 以上为第一页EA=0;EX0=0; // 关键盘中断for(j=1;j<qb;j++){while(key7289);x=qingdan[j][2];d_change(x); change(s2); // 显示数据s2[10]=s2[9];s2[9]='.'; if(s2[8]==32) s2[8]=0x30;lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s2[i]);x=qingdan[j][1];d_change(x); change(s1);x=qingdan[j][0];for(i=0;i<4;i++) s1[i]=shangpin[x][i];lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s1[i]);x=qingdan[j][3];d_change(x); change(s3);lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s3[i]);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(0x20);lcdi_send(0x98);while(key7289==0);}while(key7289);d_change(zongjia); change(s4);lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s4[i]);lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(bianhao[i]); lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(message5[i]); lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(riqi[i]);list=0;while(key7289==0);while(key7289==1);while(key7289==0);EA=1;EX0=1;}else{ y=0;/* duilie[2]=duilie[1]; // 数字滤波duilie[1]=duilie[0];y=ad1();duilie[0]=y>>1;x=duilie[0];x=x<<1;x=x+duilie[1]+duilie[2]; */zhongliang=ad1();shizhong=zhongliang-pizhong; // 数据转换x=danjia[sh];jine1=shizhong*x;jine=jine1/1;d_change(shizhong); change(s2); // 显示数据s2[10]=s2[9]; s2[9]='.';if(s2[8]==32) s2[8]=0x30;lcdi_send(0x90);for(i=0;i<16;i++) lcdd_send(s2[i]);d_change(danjia[sh]); change(s1);for(i=0;i<4;i++) s1[i]=shangpin[sh][i]; lcdi_send(0x80);for(i=0;i<16;i++) lcdd_send(s1[i]);d_change(jine); change(s3);lcdi_send(0x88);for(i=0;i<16;i++) lcdd_send(s3[i]);d_change(zongjia); change(s4);lcdi_send(0x98);for(i=0;i<16;i++) lcdd_send(s4[i]);lcdi_send(0x98);//while(1);}}}void keyin(void) interrupt 0 using 0 // 中断 0 服务程序{char X,i;long int y;send7289(0x15); // 接收数据X=receive();cs7289=1;X=X&0x1f;switch(X){case 0xf : {zongjia=zongjia+jine;qingdan[qb][0]=sh;qingdan[qb][1]=danjia[sh];qingdan[qb][2]=shizhong;qingdan[qb][3]=jine;qb++; sh=0;dot=0;danjia[0]=0;for(i=0;i<6;i++) jiage[i]=0;}break; // 累加case 0xe : pizhong=zhongliang; break; // 去皮case 0xd : {danjia[sh]=0;dot=0;} break; // 清单价case 0xc : {zongjia=0;jine=0;dot=0;list=0;qb=0;pizhong=0; if(sh==0) danjia[sh]=0;} break; // 总清case 0xa : dot=1;break; // 点case 0xb : list=1;break; // 清单case 0x19 : sh=10;break;case 0x18 : sh=9;break;case 0x17 : sh=8;break;case 0x16 : sh=7;break;case 0x15 : sh=6;break;case 0x14 : sh=5;break;case 0x13 : sh=4;break;case 0x12 : sh=3;break;case 0x11 : sh=2;break;case 0x10 : sh=1;break;case 0x1f :case 0x1e :case 0x1d :case 0x1c :case 0x1a : break;case 0x1b : dot=1;break;default :{ if(dot==0) {jiage[0]=jiage[1];jiage[1]=jiage[2];jiage[2]=X;} if(dot==1) {jiage[4]=X;dot++; }else if(dot==2) {jiage[5]=X; dot++;}else if(dot>2) break;// lcdi_send(0x84);y=jiage[0];y=y*10+jiage[1];y=y*10+jiage[2];y=y*10+jiage[4];danjia[sh]=y*10+jiage[5];}}while(key7289==0); // 等待键盘松开}/*void ad(void) interrupt 2 using 1{short x,y;x=ad_244;y=x;if(x&0x80) baojing();else x=x>>4;y=y&0xf;bcd[x]=y;} */// 初始页面void ini() // 输入收银员编号 , 日期{short i,j;char X;lcdi_send(0x80); // 提示输入收银员编号i=0;while(message1[i]) lcdd_send(message1[i++]); for(i=8;i<12;i++){while(key7289);send7289(0x15); // 接收数据X=receive();cs7289=1;bianhao[i]=X+0x30;lcdi_send(0x93);for(j=8;j<16;j++) lcdd_send(bianhao[j]);while(key7289==0);}lcdi_send(0x88); // 提示输入日期i=0;while(message2[i]) lcdd_send(message2[i++]); for(i=0;i<10;i++) // 输入日期{if(i==4||i==7) i++;while(key7289==1);send7289(0x15); // 接收数据X=receive();cs7289=1;riqi[i]=X+0x30;j=0;lcdi_send(0x9a);for(j=0;j<10;j++) lcdd_send(riqi[j]);while(key7289==0);}while(key7289);nop1();while(key7289==0);nop1();lcdi_send(0x1);}//LCD 子程序void ini_lcd() //LCD 初始化子程序{lcdi_send(0x30);lcdi_send(0x1); // 总清lcdi_send(0xc);lcdi_send(0x2); // 光标右移, AC+1}void lcdd_send(short X) //LCD 发送数据子程序{chk_busy();nop1();lcd_di=1;lcd_rw=0;lcd_e=0;P0=X;for(dealy=0;dealy<5;dealy++);//lcd_e=1; X=X;P0=0xff;}void lcdi_send(short X) //LCD 发送指令子程序{chk_busy();nop1();lcd_di=0;lcd_rw=0;lcd_e=0;P0=X;for(dealy=0;dealy<5;dealy++);//lcd_e=1; X=X;P0=0xff;}void chk_busy(){short i=0xff;while(i&0x80){lcd_di=0;lcd_rw=1;lcd_e=0;i=P0;lcd_e=1;}}//7289 子程序void ini_7289(){short i;cs7289=1; key7289=1; dio7289=1; //7289 初始化子程序for(i=0;i<50;i++)for(dealy=0;dealy<5;dealy++); // 延时 25mssend7289(0xa4); cs7289=1;}void send7289(short X) //7289 发送数据子程序{short i,j=1;cs7289=0;for(dealy=0;dealy<6;dealy++); // 延时 50us for(i=7;i>=0;i--){j=j<<i;dio7289=X&j;j=1;j=1;clk7289=1;for(dealy=0;dealy<1;dealy++) ; // 延时 10us clk7289=0;for(dealy=0;dealy<1;dealy++) ; // 延时 10us }dio7289=0;}short receive() //7289 接收数据子程序{short i,X=0;dio7289=1;for(dealy=0;dealy<6;dealy++); // 延时 50us for(i=0;i<=7;i++){clk7289=1;for(dealy=0;dealy<1;dealy++); // 延时 10usX=X<<1;if(dio7289)X++;clk7289=0;for(dealy=0;dealy<1;dealy++); // 延时 10us }dio7289=0;return(X);}//ad//AD 子程序int ad1(){short k,x;int ad_zhi=0,xz;EA=0;ad_start=1;for(k=0;k<5;k++){ while(ad_stb);x=ad_244;x=x&0xf;ad_zhi=ad_zhi*10+x;}ad_start=0;EA=1;EX0=1;ad_zhi=ad_zhi>>1;xz=ad_zhi-50;xz=xz/100;ad_zhi=ad_zhi+xiuzheng[xz];return(ad_zhi);void d_change(long X){char qian,bai,shi,ge,shifen,baifen; long int yu;if(X>) error1();qian=X/100; yu=X%100;bai=yu/10; yu=yu%10;shi=yu/1; yu=yu%1;ge=yu/100; yu=yu%100;shifen=yu/10;baifen=yu%10;qian=qian+0x30;bai=bai+0x30;shi=shi+0x30;ge=ge+0x30;shifen=shifen+0x30;baifen=baifen+0x30;if(qian==0x30){qian=0x20;if(bai==0x30){bai=0x20;if(shi==0x30) shi=0x20;}}shuju[0]=qian;shuju[1]=bai;shuju[2]=shi;shuju[3]=ge;shuju[4]='.';shuju[5]=shifen;shuju[6]=baifen;}void baojing(){short i;for(i=0;i<50;i++){baoj=0;for(dealy=0;dealy<10;dealy++); baoj=1;for(dealy=0;dealy<10;dealy++);}}摘要本系统采用单片机 AT89S52 为控制核心,实现电子秤的基本控制功能。
AD7190在精密电子秤的应用设计电路功能及优点该电路是一个电子秤系统,它使用AD7190,超低噪声,与内部PGA 的24位Σ-Δ型ADC。
在AD7190 简化了电子秤的设计,因为该系统的大部分组成部分,包括在芯片上。
在AD7190 保持了完整的输出数据率范围从4.7 赫兹的良好表现,至4.8 千赫,这使得它能够被用来在权衡,在更高的速度随着经营规模的低速称重系统,如图电路描述由于AD7190 提供了一个集成解决方案,电子磅秤,它可直接向负载细胞。
唯一所需的外部元件的模拟输入和EMC 的目的,参考引脚电容一些过滤器。
从称重传感器的低电平信号被放大了AD7190 的内部,操作与128 增益。
从AD7190 的转换,然后发送到其中的数字信息转换为重量和LCD 上显示的微控制器。
图2 显示了实际的测试设置。
因为这使系统性能优化。
负载有两个意义引脚,除了激发,地和两个输出连接。
其传感引脚连接到偏高和偏低的惠斯登电桥。
两端的电压桥由此,可以准确测量无论压降由于布线电阻。
此外,AD7190 拥有差分模拟输入,并接受差分基准。
负载感应线连接到AD7190 的基准输入创建一个比例配置,,在电源电压低激发频率的变化。
此外,它消除了对精密基准的必要性。
有了一个4 线负载,检测引脚不存在,和ADC 的参考引脚连接到激励电压和地面。
有了这项安排,该系统是不完全成比例,因为将有一个激励之间的电压,由于导线电阻感+电压下降。
也将有一个电压降由于电线偏低阻力。
在AD7190 具有独立的模拟和数字电源引脚。
在模拟部分供电,必须从5 V 的数字电源是模拟电源,可独立之间的任何电压2.7 V 和5.25 V 的微控制器采用3.3 V 电源供应。
因此,供电的DVDD 也从3.3 五,这简化了ADC 和微控。
如何设计简单的电子秤电路电子秤是一种常见的测量装置,它通过传感器和电路来测量物体的重量。
设计一个简单的电子秤电路需要考虑传感器的选择、电路的搭建和信号处理等因素。
本文将分步骤介绍如何设计简单的电子秤电路。
一、传感器的选择传感器是电子秤电路的核心部分,它可以将物体的重量转化为电信号。
在选择传感器时,需要考虑以下几个因素:1.测量范围:根据需要测量的物体重量范围选择传感器的额定量程。
一般来说,电子秤的测量范围应该是比实际需要测量的物体重量范围稍大一些。
2.精度:传感器的精度是指它所能测量的最小重量变化。
选择高精度的传感器可以提高电子秤的测量准确性。
3.输出信号:传感器可以根据工作原理产生不同的输出信号,比如电压信号、电流信号或频率信号等。
根据电子秤电路的要求选择合适的输出信号类型。
二、电路搭建设计简单的电子秤电路需要以下基本组件:1.传感器接口电路:传感器的输出信号需要经过接口电路进行信号处理。
接口电路通常包括运算放大器、滤波电路和放大器电路等。
2.模数转换器:将模拟信号转换为数字信号。
电子秤电路中常使用的模数转换器有ADC(模拟-数字转换器)。
3.微处理器:收集和处理来自传感器的数据,并输出测量结果。
可以选择一款适合的微处理器,比如Arduino等。
4.显示器:用于显示测量结果。
可以选择LED、LCD或数码管等显示器。
三、信号处理在电子秤电路中,信号处理是十分关键的一步。
它包括以下几个方面:1.传感器校准:传感器的精度可能会受到环境温度、供电电压等因素的影响,因此需要对传感器进行校准,以提高测量准确性。
2.滤波:传感器的输出信号可能会受到干扰,比如电磁干扰或传感器本身的噪声等。
通过添加滤波电路可以消除这些干扰信号,提高测量的稳定性。
3.放大:传感器的输出信号可能较小,需要通过放大电路将信号放大到合适的范围,以便后续的信号处理。
4.数据处理:利用微处理器对传感器的数据进行处理,可以进行单位转换、数据滤波和数据存储等操作。
信息与电子工程学院《单片机技术应用实训》报告题目: STC89C52电子秤电路设计材料包括仿真图、PCB、软件、制作图片等具体可咨询“黎明电子STYLE”时间: 2014年6月23日目录目录一、设计内容 (1)二、硬件设计 (1)1、工作原理 (1)2、硬件方案 (2)3、称重传感器 (2)(1) 灵敏度 (2)(2) 总误差 (3)(3) 漂移 (3)4、电子秤专用24位AD转换芯片HX711及其电路 (4)5、单片机STC89C52及其电路 (6)(1) STC89C52 单片机概述 (6)(2) STC89C52 单片机特点 (6)(3) STC89C52 单片机管脚及封装 (7)6、系统显示部分电路设计 (8)7、矩阵键盘电路 (9)8、超量程报警电路 (10)三、制作过程 (10)1、设计电路图 (10)2、绘制电路原理图 (10)3、绘制电路PCB图 (11)4、印制电路板 (13)5、焊接成型 (13)四、软件设计 (14)五、运行与使用 (16)1、上电运行 (16)2、键盘操作说明 (16)3、常用使用步骤 (17)六、总结 (17)七、参考文献 (18)附录Ⅰ:电路原理图 (19)附录Ⅱ:电路PCB图 (20)附录Ⅲ:电路实物图 (21)附录Ⅳ:器件清单 (22)附录Ⅴ:仪器仪表清单 (23)附录Ⅵ:端口功能表 (24)[摘要]电子秤是将检测与转换技术、计算机技术、信息处理、数字技术等技术综合一体的现代新型称重仪器。
它与我们日常生活紧密结合息息相关。
电子秤主要以单片机作为中心控制单元,通过称重传感器进行模数转换单元,在配以键盘、显示电路及强大软件来组成。
电子秤不但计量准确、快速方便,更重要的自动称重、数字显示,对人们生活的影响越来越大,广受欢迎。
本系统的设计主要从硬件电路设计,软件编程调试,实物焊接调试三部分进行详细阐述。
硬件电路主要是基于单片机STC89C52为核心的控制单元实现数据的处理,采用压力传感器对数据进行采集,电子秤专用24位AD转换芯片HX711对传感器采集到的模拟量进行AD转换,转换后的数据送到单片机进行处理显示,数据显示由LCD1602液晶实现,液晶显示效果稳定无闪烁。
毕业论文继续教育学院 08 级应用电子专业题目:基于单片机的电子秤设计学生姓名: .指导教师: .2012年5月目录一论文摘要 (3)二绪论 (4)1.1称重技术和衡器的发展 (4)1.2电子秤的组成 (4)2.1控制器部分 (8)2.2数据采集部分 (9)2.3显示部分电路的选择 (15)2.4超量程报警部分选择 (16)系统软件设计 (17)3.1、主程序设计 (17)3.2、子程序设计 (18)3.3数据采集部分电路设计 (23)3.4显示电路与AT89S052单片机接口电路设计 (28)3.5键盘电路与AT89S52单片机接口电路设计 (29)3.6报警电路的设计 (30)设计方案论证 (31)结论 (33)致谢 (34)参考文献 (35)附录1 系统总图 (36)附录2程序设计 (37)论文摘要随着微电子技术的应用,市场上使用的传统称重工具已经满足不了人们的要求。
为了改变传统称重工具在使用上存在的问题,在本设计中将智能化、自动化、人性化用在了电子秤重的控制系统中。
本系统主要由单片机来控制,测量物体重量部分由称重传感器及A/D转换器组成,加上显示单元,此电子秤俱备了功能多、性能价格比高、功耗低、系统设计简单、使用方便直观、速度快、测量准确、自动化程度高等特点。
本系统以AT89S52单片机为主控芯片,外围附以称重电路、显示电路、报警电路、键盘电路等构成智能称重系统电路板,从而实现自动称重系统的各种控制功能。
可以说,此设计所完成的电子秤很大程度上满足了应用需求。
【关键词】AT89S52,称重传感器,A/D转换器,LCD显示器。
绪论1.1 称重技术和衡器的发展称重技术自古以来就被人们所重视,作为一种计量手段,广泛应用于工农业、科研、交通、内外贸易等各个领域,与人民的生活紧密相连。
电子秤是电子衡器中的一种,衡器是国家法定计量器具,是国计民生、国防建设、科学研究、内外贸易不可缺少的计量设备,衡器产品技术水平的高低,将直接影响各行各业的现代化水平和社会经济效益的提高。
目录目录-----------------------------------------------------------------------------1 摘要-----------------------------------------------------------------------------2一、方案设计-----------------------------------------------------------------------31.1.选择的传感器类型------------------------------------------------------------3 1.2.对传感器的分析---------------------------------------------------------------41.3.系统方案------------------------------------------------------------------------6二、理论分析-----------------------------------------------------------------------62.1.应变片的电阻应变效应------------------------------------------------------6 2.2.应变灵敏度---------------------------------------------------------------------72.3.测量电路------------------------------------------------------------------------8三、电路设计:电路原理图及各部分分析-----------------------------------103.1.应变片全桥电路分析---------------------------------------------------------103.2. 差动放大器器电路分析-----------------------------------------------------10四、实验-----------------------------------------------------------------------------114.1.实验目的------------------------------------------------------------------------114.2.实验步骤------------------------------------------------------------------------11五、数据分析-----------------------------------------------------------------------18六、误差分析------------------------------------------------------------------------19七、总结------------------------------------------------------------------------------20 参考文献-----------------------------------------------------------------------------21摘要本设计采用检测实验室的CSY-3000型传感器与检测技术实验台设计并制作了一台简易电子秤。
简易电子秤的设计一、简易智能电子秤系统结构与原理称重传感器:当被称物体放置在秤盘上时,压力传感器产生力电效应,将物体的压力转换成与被称物体压力成一定函数关系的电信号。
信号处理电路:该电信号先通过前端信号处理电路进行初步处理,以增强信号的稳定性和准确性。
AD转换器:经过信号处理的模拟电信号需要通过AD转换器(如H711芯片)将其转换成数字信号,以便于微控制器进行处理。
H711是一款专为高精度电子秤设计的24位AD转换器芯片,具有集成度高、响应速度快、抗干扰性强等优点。
微控制器(MCU):数字信号送入微控制器后,MCU通过扫描键盘和各种功能开关,根据输入内容和开关状态进行判断、分析和控制,完成各种运算和显示功能。
显示模块:微控制器将计算结果输出到显示模块,如数码管或液晶显示屏,以显示被称物体的重量、价格等信息。
通过以上结构与原理,简易智能电子秤能够实现物体的准确称重,并通过微控制器的处理和控制,提供更多的智能化功能。
二、硬件设计在简易电子秤的设计中,硬件部分是实现秤重功能的基础。
本节将详细介绍电子秤的硬件设计,包括传感器选择、信号处理电路、显示模块和电源管理。
传感器是电子秤的核心部件,负责将物体的重量转换为电信号。
在本设计中,我们选用应变式称重传感器。
这种传感器基于金属电阻应变片的原理,当物体施加压力时,应变片会产生电阻变化,通过惠斯通电桥转换为电压信号输出。
这种传感器具有灵敏度高、稳定性好、抗干扰能力强等特点。
传感器输出的电压信号非常微弱,需要通过信号处理电路进行放大、滤波和线性化处理。
信号处理电路主要包括放大器、滤波器和AD转换器。
放大器:使用运算放大器对传感器信号进行放大,以满足后续电路的处理需求。
显示模块用于直观地显示秤重结果。
本设计采用LCD显示屏,可以清晰地显示数字和字符。
微处理器将处理后的重量数据发送给LCD 显示屏进行显示。
电源管理是确保电子秤稳定运行的关键。
本设计采用内置电池供电,通过电源管理模块进行电压稳定和电池电量监测。
电子秤电路设计与制作实验报告姓名:学号:指导老师:通信与信息工程学院电子秤电路设计指导书一、实验目的:本实验要求学生设计并制作一个电子秤电路,要求能测量重量在0~200g 间的物体,输出为电压信号,通过调节电路使电压值为对应的重量值,电压量纲mv 改为重量纲g 即成为一台原始电子秤。
二、基本原理:基本思路总体设计思路如图1所示,所测重量经过转换元件转换为电阻变化,再经过测量电路转化为电压变化,经过放大电路放大调节后输出显示得到所需信号。
图1 基本设计思路电阻应变式传感器本设计主要通过电阻应变式传感器实现。
电阻应变式传感器是利用电阻应变片将应变转换为电阻的变化,实现电测非电量的传感器。
传感器由在不同的弹性敏感元件上粘贴电阻应变片构成,当被测物理量作用在弹性敏感元件上时,弹性敏感元件产生变形,并使附着其上的电阻应变片一起变形,电阻应变片再将变形转换为电阻值的变化。
应变式电阻传感器是目前在测量力、力矩、压力、加速度、重量等参数中应用最广泛的传感器之一。
1、弹性敏感元件物体在外力作用下而改变原来尺寸或形状的现象称为变形,而当外力去掉后物体又能完全恢复其原来的尺寸和形状,这种变形称为弹性变形。
具有弹性变形特性的物体称为弹性元件。
弹性敏感元件是指元件在感受到力、压力、力矩、振动等被测参量时,能将其转换成应变量或位移量,弹性敏感元件可以把被测参数由一种物理状态转换为另一种所需要的物理状态。
2、电阻应变片被测物体重量转换元件测量电路差分放大电路二级放大电路输出显示对于一段长为L ,截面积为S ,电阻率为ρ的导体,未受力时电阻为 R = ρ ,在外力的作用下,电阻丝将会被拉伸或压缩,导体的长度L 、截面积S 以及电阻率ρ等均将发生变化,从而导致其电阻值发生变化,这种现象称为“电阻应变效应”。
利用金属或半导体材料电阻丝的应变电阻效应,可以制成测量试件表面应变的敏感元件。
为在较小的尺寸范围内感受应变,并产生较大的电阻变化,通常把应变丝制成栅状的应变敏感元件,即电阻应变片,通常由敏感栅、基底、盖片、引线和黏结剂等组成。
电子秤电路设计
电子秤是现代社会中广泛应用的一种衡量物品重量的设备,它具有高精度、稳定性强、易于读数等优点。
电子秤的核心部件是压电式传感器,传感器通过受力形变产生电信号,再经过信号处理器处理并转化为显示重量的数字。
因此,电子秤电路设计中压电式传感器与信号处理器是核心考虑因素。
一、压电式传感器的电路设计
压电式传感器是通过物理变化产生电压信号,进而检测物体重量的设备。
根据工作原理,压电式传感器可分为电荷式和压力式两种。
电荷式传感器通过物理变化产生电荷,进而产生电压信号。
压力式传感器则是通过物理体积变化,产生电信号。
以下仅讨论压力式传感器的电路设计。
1.电路原理
压力传感器主要由桥式电路、信号放大电路和滤波电路三部分组成。
(1)桥式电路:桥式电路分为有源桥式电路和无源桥式电路。
目前多采用无源桥式电路,因为它不需要外部电源,便于实现多点测量等多台组合共同测量。
(2)信号放大电路:传感器产生的电信号相当小,需通
过信号放大器放大后才能有效的进行传输和处理。
(3)滤波电路:滤波器用于去除杂波、信号噪声等,保证电路稳定性和准确性。
常用的滤波器有低通滤波器和带通滤波器等。
2.电路参数
(1)灵敏度:传感器允许工作范围内,重量变化所引起的电路输出变化量,常用的单位是mv/kg,kg/mv。
(2)非线性度:指传感器输出与实际值之间的误差,一般用±%来表示。
(3)零点漂移:指在重量不变的情况下,电路输出随时间漂移的程度,常用的单位是mV/h或%FS/h。
(4)灵敏度温漂:指在温度变化的情况下,灵敏度相对变化的情况,常用的单位是%RS/℃。
二、信号处理器的电路设计
信号处理器是将传感器输出的电信号传输和处理的部分,主要问题是如何提高信号精度和稳定性。
1.放大电路设计
放大电路是放大传感器输出信号的重要组成部分,合理的设计可以使信号精度和信噪比大大提高。
在放大电路中,需要考虑的几个问题:
(1)增益大小:增益大小是决定信号放大倍数的关键因素,合理选择增益大小可以使信号精确到小数点后几位。
(2)增益平坦度:增益平坦度是指信号处理器在接收同样大小的信号时所产生的放大倍数应尽量平均,不应因频率不同而有所差异。
(3)输出电阻:如何把放大电路输出信号与后续电路、微处理器等相连接也需要考虑输出电阻,通常采用低输出电阻的差动放大电路。
2.滤波电路设计
由于信号受到干扰,无论在有线或无线环境中,信号都很容易受到各种噪声的影响,所以需要设计滤波电路,主要有低通滤波器和带通滤波器两种。
3.微处理器的设计
微处理器的设计应依据具体应用场合而定,如蓝牙传输、WIFI传输、4-20mA模拟输出等。
需要考虑的因素有信号灵敏度、处理速度、低功耗等。
除了上述方面,在电源选择、温度稳定性等方面也需要考虑,具体应根据实际情况进行综合考虑。
综上,电子秤电路设计中,压电式传感器和信号处理器是设计的两个重要组成部分。
在使用不同的传感器、信号处理器的设计中需要综合考虑不同参数要素,提高电路的精度和稳定性,以提供更加准确的重量测量。