伺服系统设计 伺服系统中机械部件的选择与设计
- 格式:ppt
- 大小:3.40 MB
- 文档页数:62
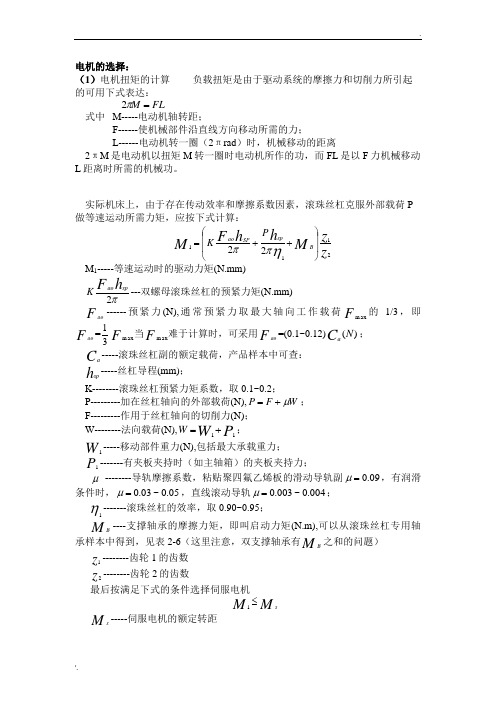
电机的选择:(1)电机扭矩的计算 负载扭矩是由于驱动系统的摩擦力和切削力所引起的可用下式表达: FL M =π2式中 M-----电动机轴转距;F------使机械部件沿直线方向移动所需的力;L------电动机转一圈(2πrad )时,机械移动的距离2πM 是电动机以扭矩M 转一圈时电动机所作的功,而FL 是以F 力机械移动L 距离时所需的机械功。
实际机床上,由于存在传动效率和摩擦系数因素,滚珠丝杠克服外部载荷P 做等速运动所需力矩,应按下式计算:z z M h h F M B spSPao P K 211122⎪⎪⎭⎫ ⎝⎛++=ηππ M 1-----等速运动时的驱动力矩(N.mm)π2hF spao K---双螺母滚珠丝杠的预紧力矩(N.mm) Fao------预紧力(N),通常预紧力取最大轴向工作载荷Fm ax的1/3,即F ao =31F m ax当F m ax 难于计算时,可采用F ao =(0.1~0.12))(N C a ; C a -----滚珠丝杠副的额定载荷,产品样本中可查:hsp-----丝杠导程(mm);K--------滚珠丝杠预紧力矩系数,取0.1~0.2;P---------加在丝杠轴向的外部载荷(N),W F P μ+=; F---------作用于丝杠轴向的切削力(N); W--------法向载荷(N),P W W 11+=;W 1-----移动部件重力(N),包括最大承载重力;P 1-------有夹板夹持时(如主轴箱)的夹板夹持力;μ --------导轨摩擦系数,粘贴聚四氟乙烯板的滑动导轨副09.0=μ,有润滑条件时,05.0~03.0=μ,直线滚动导轨004.0~003.0=μ;η1-------滚珠丝杠的效率,取0.90~0.95;MB----支撑轴承的摩擦力矩,即叫启动力矩(N.m),可以从滚珠丝杠专用轴承样本中得到,见表2-6(这里注意,双支撑轴承有M B 之和的问题)z 1--------齿轮1的齿数 z2--------齿轮2的齿数最后按满足下式的条件选择伺服电机M M s ≤1Ms-----伺服电机的额定转距(2)惯量匹配计算 为使伺服进给系统的进给执行部件具有快速相应能力,必须选用加速能力大的电动机,亦即能够快速响应的电机(如采用大惯量伺服电机),但又不能盲目追求大惯量,否则由于不能从分发挥其加速能力,会不经济的。

电子信息与电气工程系课程设计报告设计题目:直流伺服电机控制系统设计系别:电子信息与电气工程系年级专业:学号:学生姓名:2006级自动化专业《计算机控制技术》课程设计任务书摘要随着集成电路技术的飞速发展,微控制器在伺服控制系统普遍应用,这种数字伺服系统的性能可以大大超过模拟伺服系统。
数字伺服系统可以实现高精度的位置控制、速度跟踪,可以随意地改变控制方式。
单片机和DSP在伺服电机控制中得到了广泛地应用,用单片机作为控制器的数字伺服控制系统,有体积小、可靠性高、经济性好等明显优点。
本设计研究的直流伺服电机控制系统即以单片机作为核心部件,主要是单片机为控制核心通过软硬件结合的方式对直流伺服电机转速实现开环控制。
对于伺服电机的闭环控制,采用PID控制,利用MATLAB软件对单位阶跃输入响应的PID 校正动态模拟仿真,研究PID控制作用以及PID各参数值对控制系统的影响,通过试凑法得到最佳PID参数。
同时能更深度地掌握在自动控制领域应用极为广泛的MATLAB软件。
关键词:单片机直流伺服电机 PID MATLAB目录1.引言 ...................................................... 错误!未定义书签。
2.单片机控制系统硬件组成.................................... 错误!未定义书签。
微控制器................................................ 错误!未定义书签。
DAC0808转换器.......................................... 错误!未定义书签。
运算放大器............................................... 错误!未定义书签。
按键输入和显示模块....................................... 错误!未定义书签。


浅谈伺服系统的设计作者:张春凤来源:《职业·中旬》2010年第05期一、伺服系统及其构成伺服系统(Servo system)也叫随动系统,是自动控制系统的一种。
光机电一体化系统中的伺服系统,以机械量(如位移、速度、加速度、力和力矩等)作为控制量,在控制指令作用下驱动执行元件,使机械的运动部件按照控制指令的要求运动,并满足一定的性能指标。
伺服系统的基本要求是使系统的输出量能够快速而精确地跟随输入指令的变化规律。
伺服系统通常具有负反馈的闭环控制系统,也有采用开环控制系统。
伺服系统服务的对象很多,如计算机光盘驱动控制、弧焊机器人轨迹控制、雷达跟踪系统等,都需要使用伺服系统。
虽然服务对象的运动部件、检测部件以及机械结构等不同,对伺服系统的要求有差别,但所有伺服系统的共同点则是带动控制对象按照指定规律作机械运动。
伺服系统的一般组成可描述为图1所示的形式。
伺服系统的执行元件是机械部件和电子装置的接口,功能是根据控制器发出的控制指令,将能量转换为机械部件运动的机械能。
根据执行元件能量转换形式的不同,可以分为电气元件、液压元件和气压元件3种。
伺服系统的执行元件可由3种元件独立构成,也可以互相组合。
如完全由电气元件组成的电气伺服系统,由电气和液压元件组合的电气一液压伺服系统等等。
电气执行元件也就是通常所说的电机,具有能源易获取、干净无污染、控制性能良好等优点,目前多数伺服系统采用电机作为伺服系统的执行元件。
二、伺服系统的基本要求1.对系统稳态性能的要求伺服系统的稳态性能指标包括系统静态误差、速度误差、加速度误差。
速度误差是指系统处于等速跟踪状态时,输出轴与其输入轴作相等的匀速运动时,同一时刻二者的转角差;加速度误差是指系统输出轴在一定的速度和加速度范围内跟踪输入轴运动时,在同一时刻两轴之间的最大差值。
2.对伺服系统动态性能的要求伺服系统应渐近稳定并留有一定的稳定裕量。
在典型信号输入下,系统的时域响应特性要满足规定要求。
电液伺服系统的设计与实现随着科技的不断发展,机械设备的功能和性能要求也越来越高。
而在众多机械设备中,电液伺服系统以其优良的性能和高效的工作模式,已经成为了广泛应用的设备之一。
本文将就电液伺服系统的设计和实现进行讨论,以期提高其性能和工作效率。
一、电液伺服系统的组成电液伺服系统是由3个部分组成的:电子控制单元、电液传动系统和执行机构。
1. 电子控制单元电子控制单元包括控制器和信号处理器,控制器是整个系统的核心。
它可以接收来自传感器的反馈信息,根据内部程序计算出控制信号,并输出到执行机构,实现对执行机构的精确控制。
2. 电液传动系统电液传动系统是整个电液伺服系统的动力源,它包括电液转换器、电动机、泵、油箱、阀门等组成。
电动机通过传动装置,驱动泵产生压力液体,液体经过阀门进入执行机构,实现机械臂等动作。
3. 执行机构执行机构是电液伺服系统的输出节点,它通过接收液压驱动,转换为机械运动。
在典型的电液伺服系统中,执行机构通常包括液压缸、液压马达、液压单元等。
二、电液伺服系统的优点1. 精度高因为电液伺服系统可以接收来自传感器的反馈信息,根据内部程序计算出控制信号,并输出到执行机构,实现对执行机构的精确控制,所以其控制精度很高,可以满足高精密度机械设备的要求。
2. 动态性能好电液伺服系统的调节速度快,反应灵敏。
它不仅可以适应于各种工况的需要,而且可以根据需要进行控制和调节。
相比之下,其他传动系统难以满足这些要求。
3. 可扩展性强电液伺服系统的结构比较清晰,它根据要求可以进行功能扩展。
同时,它也可以与其他的控制系统进行集成,如PLC、CAN总线等。
三、电液伺服系统的设计电液伺服系统的设计必须根据所需的实际应用来进行,下面简单介绍了一些设计方法。
1. 系统参数计算电液伺服系统的设计一定要进行系统参数计算,以确保正确的系统工作。
主要包括负载惯性、运动速度、加速度、油液流量、泵、马达的型号、离合器等参数的计算。
2. 控制系统设计控制系统设计是电液伺服系统设计的核心问题。