数控液压伺服系统设计原理与应用
- 格式:pdf
- 大小:353.00 KB
- 文档页数:3
HST的工作原理HST,全称为Hydraulic Servo Turret(液压伺服转塔),是一种用于工业机械领域的关键设备。
它在许多应用中被广泛使用,例如数控机床、物料搬运系统和自动化生产线等。
本文将详细介绍HST的工作原理,包括其组成部份、工作流程和应用案例。
一、HST的组成部份HST主要由以下几个组成部份构成:1. 液压伺服系统:液压伺服系统是HST的核心部份,它由液压泵、液压缸、液压阀和传感器等组成。
液压泵负责提供高压液压油,液压阀用于控制液压油的流动方向和流量,液压缸则将液压能转化为机械能。
2. 伺服机电:伺服机电是HST的动力源,它通过接收控制信号来实现精确的位置和速度控制。
伺服机电通常与液压泵相连,通过控制液压泵的转速来实现对液压系统的控制。
3. 控制系统:控制系统是HST的大脑,它负责接收和处理来自传感器的反馈信号,并生成相应的控制信号。
控制系统通常由微处理器、编码器、传感器和人机界面等组成。
二、HST的工作流程HST的工作流程可以分为以下几个步骤:1. 接收输入信号:HST通过传感器接收输入信号,例如位置、速度和力等。
2. 信号处理:控制系统对接收到的信号进行处理,例如进行滤波、放大和校准等,以确保信号的准确性和稳定性。
3. 生成控制信号:根据经过处理的输入信号,控制系统生成相应的控制信号,用于控制液压伺服系统和伺服机电。
4. 控制液压伺服系统:控制信号通过液压阀控制液压泵的转速和液压阀的开关状态,从而调节液压伺服系统的压力和流量。
5. 驱动伺服机电:控制信号被传送给伺服机电,通过控制伺服机电的转速和方向,实现对工作装置的精确控制。
6. 反馈和调整:伺服机电通过编码器等传感器实时反馈位置和速度信息给控制系统,控制系统根据反馈信息进行调整,以实现更精确的控制。
三、HST的应用案例HST在许多工业领域中都有广泛的应用,以下是几个典型的应用案例:1. 数控机床:HST可以用于数控机床中的转塔控制,通过精确的位置和速度控制,实现工件的高效加工。
一文详解cnc电液伺服系统组成及控制原理
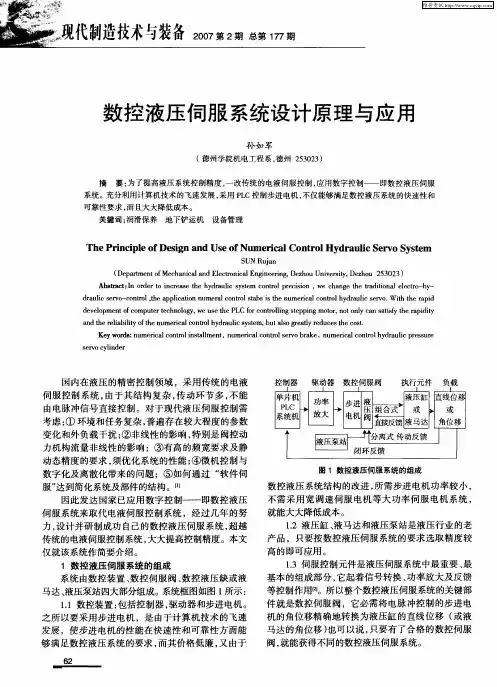
为了提高液压系统控制精度,将传统的电液伺服控制方式改为数控液压伺服控制方式。
充分利用先进的计算机技术,采用PLC控制步进电机,不仅能够满足数控液压系统的快速性和可靠性要求,而且大大降低了成本。
本文首先介绍了数控液压伺服系统的组成,其次介绍了数控液压伺服阀的结构和工作原理,最后介绍了液压泵站,具体的跟随小编一起来了解一下。
一、数控液压伺服系统的组成系统由数控装置、数控伺服阀、数控液压缸或液马达、液压泵站4大部分组成。
系统框图如图1所示。
(1)数控装置:包括控制器、驱动器和步进电机。
之所以要采用步进电机,是由于计算机技术的飞速发展,使步进电机的性能在快速性和可靠性方面能够满足数控液压系统的要求,而其价格低廉,又由于数控液压系统结构的改进,所需步进电机功率较小,不需采用宽调速伺服电机等大功率伺服电机系统,就能大大降低成本。
(2)液压缸、液马达和液压泵站是液压行业的老产品,只要按数控液压伺服系统的要求选取精度较高的即可应用。
(3)伺服控制元件是液压伺服系统中最重要、最基本的组成部分,它起着信号转换、功率放大及反馈等控制作用。
所以整个数控液压伺服系统的关键部件就是数控伺服阀,它必需将电脉冲控制的步进电机的角位移精确地转换为液压缸的直线位移(或液马达的角位移)。
也可以说,只要有了合格的数控伺服阀,就能获得不同的数控液压伺服系统。
二、数控液压伺服阀的结构和工作原理1、数控液压伺服阀的结构
数控液压伺服阀的结构如图2所示,数控液压缸的结构如图3所示
2、工作原理
1)数控液压伺服阀和液压缸匹配工作原理。
浅谈关于液压伺服系统的研究的论文本文从网络收集而来,上传到平台为了帮到更多的人,如果您需要使用本文档,请点击下载按钮下载本文档(有偿下载),另外祝您生活愉快,工作顺利,万事如意!论文关键词数控液压伺服系统数控改造论文摘要随着液压伺服控制技术的飞速发展,液压伺服系统的应用越来越广泛,随之液压伺服控制也出现了一些新的特点,基于此对于液压伺服系统的工作原理进行研究,并进一步探讨液压传动的优点和缺点和改造方向,以期能够对于相关工作人员提供参考。
一、引言液压控制技术是以流体力学、液压传动和液力传动为基础,应用现代控制理论、模糊控制理论,将计算机技术、集成传感器技术应用到液压技术和电子技术中,为实现机械工程自动化或生产现代化而发展起来的一门技术,它广泛的应用于国民经济的各行各业,在农业、化工、轻纺、交通运输、机械制造中都有广泛的应用,尤其在高、新、尖装备中更为突出。
随着机电一体化的进程不断加快,技术装各的工作精度、响应速度和自动化程度的要求不断提高,对液压控制技术的要求也越来越高,文章基于此,首先分析了液压伺服控制系统的工作特点,并进一步探讨了液压传动的优点和缺点和改造方向。
二、液压伺服控制系统原理目前以高压液体作为驱动源的伺服系统在各行各业应用十分的广泛,液压伺服控制具有以下优点:易于实现直线运动的速度位移及力控制,驱动力、力矩和功率大,尺寸小重量轻,加速性能好,响应速度快,控制精度高,稳定性容易保证等。
液压伺服控制系统的工作特点:(1)在系统的输出和输入之间存在反馈连接,从而组成闭环控制系统。
反馈介质可以是机械的,电气的、气动的、液压的或它们的组合形式。
(2)系统的主反馈是负反馈,即反馈信号与输入信号相反,两者相比较得偏差信号控制液压能源,输入到液压元件的能量,使其向减小偏差的方向移动,既以偏差来减小偏差。
(3)系统的输入信号的功率很小,而系统的输出功率可以达到很大。
因此它是一个功率放大装置,功率放大所需的能量由液压能源供给,供给能量的控制是根据伺服系统偏差大小自动进行的。
伺服系统包含哪些(基本组成_工作原理_应用)
伺服系统的结构组成机电一体化的伺服控制系统的结构、类型繁多,但从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
下图给出了伺服系统组成原理框图。
图伺服系统组成原理框图
1.比较环节
比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信
2.控制器
控制器通常是计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
3.执行环节
执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作。
机电一体化系统中的执行元件一般指各种电机或液压、气动伺服机构等。
4.被控对象
5.检测环节
检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
伺服系统工作原理伺服系统是使物体的位置、方位、状态等输出被控量能够跟随输入目标的任意变化而变化的自动控制系统,即伺服系统是具有反馈的闭环自动控制系统。
它由计算机数字控制系统、伺服驱动器、伺服电动机、速度和位置传感器等组成。
计算机数字控制系统用来存储零件加工程序,根据编码器反馈回来的信息进行各种插补运算和软件实时控制,向各坐标轴的伺服驱动系统发出各种控制命令。
伺服驱动器和伺服电动机接收到计算机数字控制系统的控制命令后,对功率进行放大、变换与调控等处理,能够快速平滑调。

伺服工作原理
伺服工作原理是指通过运用反馈控制原理,使系统能够实时地根据所需输出值进行调整和校正,以达到精确控制输出的目的。
伺服系统主要包括信号调整器、执行器和反馈装置三个主要组成部分。
其中,信号调整器负责将输入信号进行放大、加工和调整,生成合适的控制信号。
执行器接收来自信号调整器的控制信号,并将其转化为相应的动作或力,以实现所需的运动或输出。
反馈装置监测执行器的输出,并将实际输出值反馈给信号调整器,用于校正和调整控制信号,以使输出更加准确。
在伺服系统中,最常见的反馈装置是编码器。
编码器通过测量旋转角度或线性位移的变化来获取系统的实际输出值,并将其转化为脉冲信号输出。
这些脉冲信号回传给信号调整器,用于比较和校正与期望输出值之间的差距,并生成修正后的控制信号。
当系统工作时,信号调整器将输入信号与反馈信号进行比较,并生成误差信号。
误差信号经过放大和滤波处理后,送入执行器,使其作出相应的调整。
执行器将调整后的输出力或运动传递到负载上,实现所需的运动或输出。
通过反复的比较和调整过程,伺服系统能够实现精确控制输出,并能够在外界干扰或负载变化的情况下自动校正。
伺服系统广泛应用于工业自动化、机器人技术、机械加工、医疗设备等领域,为各种精密控制提供强大支持。

第11章液压伺服系统概述液压伺服控制技术是液压技术中的一个分支,又是控制领域中的一个重要组成部分。
一、液压伺服系统的发展历史在第一次世界大战前,液压伺服系统作为海军舰船的操舵装置已开始应用。
在第二次世界大战期间及以后,由于军事需要,特别是武器和飞行器控制系统的需要,以及液压伺服系统本身具有响应快、精度高、功率一重量比大等优点,液压伺服系统的理论研究和实际应用取得了很大的进展,40年代开始了滑阀特性和液压伺服理论的研究,1940年底,首先在飞机上出现了电液伺服系统。
但该系统中的滑阀由伺服电机驱动,只作为电液转换器。
由于伺服电机惯量大,使电液转换器成为系统中耗时最大的环节,限制了电液伺服系统的响应速度。
到50年代初,出现了快速响应的永磁力矩马达,形成了电液伺服阀的雏形。
到50年代末,又出现了以喷嘴挡板阀作为第一级的电液伺服阀,进一步提高了伺服阀的快速性。
60年代,各种结构的电液伺服阀相继出现,特别是干式力矩马达的出现,使得电液伺服阀的性能日趋完善。
由于电液伺服阀和电子技术的发展,使电液伺服系统得到了迅速的发展。
随着加工能力的提高和液压伺服阀工艺性的改善,使液压伺服阀性能提高、价格降低。
使液压伺服系统由军事向一般工业领域推广。
目前,液压伺服控制系统,特别是电液伺服系统已成了武器自动化和工业自动化的一个重要方面。
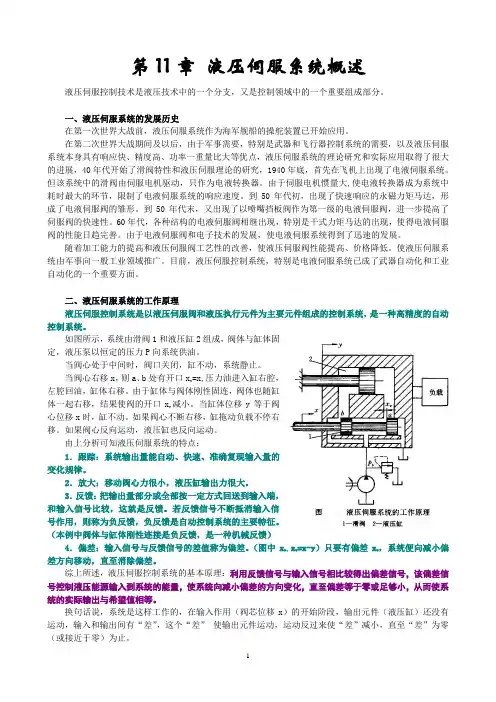
二、液压伺服系统的工作原理液压伺服控制系统是以液压伺服阀和液压执行元件为主要元件组成的控制系统,是一种高精度的自动控制系统。
如图所示,系统由滑阀1和液压缸2组成,阀体与缸体固定,液压泵以恒定的压力P向系统供油。
当阀心处于中间时,阀口关闭,缸不动,系统静止。
当阀心右移x,则a、b处有开口x v=x,压力油进入缸右腔,左腔回油,缸体右移。
由于缸体与阀体刚性固连,阀体也随缸体一起右移,结果使阀的开口x v减小。
当缸体位移y等于阀心位移x时,缸不动。
如果阀心不断右移,缸拖动负载不停右移。
如果阀心反向运动,液压缸也反向运动。
数控高速冲床液压系统设计摘要:通过对当前数控高速冲床的一些主流液压系统进行研究,吸取它们一些好的特点,开发一新的驱动方案,以达到高速、精确、易控制的目的。
该方案主要通过机、电和液压系统相互融合运用,设计出一套数控高速冲床的液压系统——通过步进电机实现对比例阀和液压系统的精确控制。
随着我国工业逐渐向现代化方向加速开展,现代工业体系逐渐构成,国内市场关于高速冲压设备的需求愈加迫切,对其各方面的性能请求也越来越高。
目前我国简直还不具备自主生产高速冲压设备的液压系统的才能,形成我国生产冲压设备的本钱很高,且进口的液压系统不能很好的顺应我国的实践状况,所以,依据我国目前的实践状况,研制出合适我国国情的高速数控冲床液压系统是一个亟待处理的课题。
一、冲压设备的概述要使冲压技术得到更大开展,具有更先进的冲压设备是一个必备的前提,冲压系统是冲压设备重要的组成局部,是目前世界各国冲的压系统主要采用机械式和液压式,机械式是一种比拟传统的冲压方式,其主要经过曲柄压力机这一设备完成冲压,曲柄压力机的主要零部件有滑块、曲轴、连杆等。
液压式冲压机应用液压传动系统来完成冲压功用,其根本工作原理为YA1中有电流经过时液压油在泵的作用下经过电磁换向阀流入液压缸下腔,这时液压缸上腔的液压油就会经由单向阀3、电磁换向阀2后流回油箱,滑块在活塞的带动下向上运动;这时对YA2通电,电磁换向阀2的右位开端工作,滑块会在活塞的带动下向下运动,对工件进行冲压,完成冲压功用。
二、数控高速冲床液压系统的设计2.1系统的工况剖析及计划确实定设计的该款高速冲床不只能够冲压金属,还可以进行冲孔加工。
对工件冲压式,滑块快速降落,接触到工件时,滑块速度降低,但压力变大,以保证工件精确的成形,完成冲压过程后,滑块快速上升。
该液压系统为到达快速冲压的目的,设计系统的回路时采用了蓄能器+双泵供油+差动衔接的组合。
选定比例伺服方向阀作为冲床液压系统的控制元件,以满足系统工作时需快速频繁换向的请求。
液压驱动技术在机床上的应用与研究液压驱动技术是一种利用液体的压力进行动力传递和控制的技术,在机床行业中得到了广泛的应用与研究。
液压驱动技术具有结构简单、传动力矩大、响应快、精度高等优势,使机床能够实现高效率、高精度的加工操作。
本文将从液压系统组成、液压驱动技术在机床上的应用以及研究方向与前景等方面,对液压驱动技术在机床上的应用与研究进行阐述。
液压系统由液压泵、执行元件、控制元件和辅助元件等部分组成。
液压泵负责将电动机传递的动力转化为液体的压力能,将液体输送到执行元件。
执行元件包括液压缸和液压马达,负责将液体能量转化为机械能,实现机床的加工操作。
控制元件包括液压阀和液压控制系统,用于控制液体的流向和压力,实现机床的运动与动作。
辅助元件包括油箱、散热器、滤清器等,用于辅助液压系统的运行和维护。
液压驱动技术在机床上的应用十分广泛,涉及到各个方面的加工操作。
其中,最为常见的应用是液压压力机和液压剪板机。
液压压力机利用液压系统提供的大功率和连续的力来压制工件,实现冷挤压、冷弯、冲孔等操作。
液压剪板机则利用液压系统提供的高压液体来切割和剪断材料,实现板材的剪切和切割。
这些液压机械具有结构简单、切割力大、工作稳定等特点,能够满足机床加工的需求。
除了压力机和剪板机,液压驱动技术还应用于数控机床、车床、铣床、磨床等各类机床中。
在数控机床中,液压驱动技术可用于控制主轴、进给轴、伺服轴运动,实现复杂的加工操作。
在车床、铣床、磨床等机床中,液压驱动技术可用于控制主轴、滑台、进给轴等运动,提高切削效率和加工精度。
液压系统的使用使得机床能够实现高速运动、高负荷加工和高精度控制。
液压驱动技术在机床上的研究主要集中在提高其性能和效率上。
一方面,研究者致力于开发新型的液压泵、液压缸和液压控制元件,以提高液压系统的工作效率和能量利用率。
例如,采用可调速液压泵和变量容积液压泵,可以根据加工工艺和负荷条件实时调节液压系统的输出功率和流量;应用先进的液压缸材料和密封技术,可以减少泄漏和损耗,提高液压系统的工作效率。