材料力学第8章应力状态分析
- 格式:ppt
- 大小:3.55 MB
- 文档页数:10
![周建方版材料力学习题解答[第八章9]分析](https://uimg.taocdn.com/cbb06210a417866fb94a8e07.webp)
8-49现用某种黄铜材料制成的标准圆柱形试件做拉伸试验。
已知临近破坏时,颈缩中心部位的主应力比值为113321::::=σσσ;并已知这种材料当最大拉应力达到770MPa 时发生脆性断裂,最大切应力达到313MPa 时发生塑性破坏。
若对塑性破坏采用第三强度理论,试问现在试件将发生何种形式的破坏?并给出破坏时各主应力之值。
解: 令主应力分别为:σσ31=,σσσ==32脆性断裂时,由第一强度理论=1r σσσ31==770MPa所以,塑性破坏时,由第三强度理论 所以故,试件将发生脆性断裂。
破坏时MPa 7701=σ,MPa 25732==σσ8-50 钢制圆柱形薄壁压力容器(参见图8-13),其平均直径mm d 800=,壁厚mm 4=δ,材料的M P a ][120=σ,试根据强度理论确定容器的许可内压p 。
解:在压力容器壁上取一单元体,其应力状态为二向应力状态。
p pd 504'==δσ ,p pd1002"==δσ 其三个主应力为p 100"1==σσ, p 50'2==σσ,03=σ据第三强度理论所以 ,MPa p 2.13≤,许可内压MPa p 2.13= 据第四强度理论所以,MPa p 39.14≤,许可内压MPa p 39.14=8-51 空心薄壁钢球,其平均内径mm d 200=,承受内压MPa p 15=,钢的MPa ][160=σ。
试根据第三强度理论确定钢球的壁厚δ。
解:钢球上任一点应力状态如图示 其三个主应力为:σσσ==21,03=σ而 MPa MPa d p R R p δδδδππσ4342.0152222=⨯=⋅=⋅⋅=据第三强度理论 所以 mm m 69.41069.41601433=⨯=⨯≥-δ 8-52 图8-77所示两端封闭的铸铁圆筒,其直径mm d 100=,壁厚mm 10=δ,承受内压MPa p 5=,且在两端受压力kN F 100=和外扭矩m kN T ⋅=3作用,材料的许用拉应力MPa ][40=+σ,许用压应力MPa ][160=-σ,泊松比250.=ν,试用莫尔强度理论校核其强度。
第八章2应力应变状态分析应力应变状态分析是研究材料或结构在外力作用下所产生的应力和应变的过程。
应力是单位面积上的内力,用于描述材料或结构对外力的抵抗能力。
而应变是形变相对于初始状态的变化量,用于描述材料或结构的变形程度。
针对材料或结构的应力应变状态进行分析,可以帮助我们了解其力学性能和稳定性,为工程实践提供重要依据。
应力应变状态分析是弹性力学的基本内容之一、根据材料的力学性质和外力的作用,可以得到不同的应力应变状态。
在弹性力学中,线弹性和平面应变假定是常用的简化假设。
线弹性假定材料仅在拉伸和压缩的方向上有应力,而在横截面上的应力是均匀分布的。
一维拉伸和挤压是线弹性应力应变状态的基本类型。
平面应变假定材料在一个平面内有应力,而在垂直于该平面的方向上无应力。
二维平面应变是平面应变应力应变状态的基本类型。
在应力应变状态分析中,我们通常关注应力和应变之间的关系。
最常见的是材料的应力-应变曲线。
应力-应变曲线描述了材料在外力作用下的力学行为,可以帮助我们了解材料的强度、塑性和韧性等性能。
在弹性阶段,应力-应变曲线呈线性关系,符合胡克定律。
而在屈服点之后,材料会发生塑性变形,应力不再是线性关系。
当应力达到最大值时,材料会发生破坏。
除了应力-应变曲线外,还有一些其他重要的参数和指标可用于描述应力应变状态。
例如,弹性模量是描述材料刚度的重要参数,表示单位应力引起的单位应变量。
剪切弹性模量描述了材料抵抗剪切变形的能力。
同时,杨氏模量和泊松比也是用于描述材料力学性质的常用参数。
应力应变状态分析在材料工程、结构工程以及土木工程等领域具有重要应用。
通过对材料和结构的应力应变状态进行分析,可以帮助我们评估其性能和强度,并且对设计和优化具有指导意义。
例如,在结构工程中,通过应力应变状态分析可以确定材料的承载能力和极限状态,从而确保结构在设计荷载下的安全运行。
然而,应力应变状态分析也面临一些挑战。
首先,材料的力学性质和变形行为往往是非线性的,需要使用复杂的数学模型进行描述。
材料力学应力状态分析材料力学是研究物质内部力学性质和行为的学科,其中应力状态分析是材料力学中的重要内容之一。
应力状态分析是指对材料内部受力情况进行分析和研究,以揭示材料在外力作用下的应力分布规律和应力状态特征,为工程设计和材料选用提供依据。
本文将从应力状态的基本概念、分类和分析方法等方面展开讨论。
首先,我们来介绍一下应力状态的基本概念。
应力是指单位面积上的力,是描述物体内部受力情况的物理量。
在材料力学中,通常将应力分为正应力和剪应力两种基本类型。
正应力是指垂直于截面的应力,而剪应力是指平行于截面的应力。
在实际工程中,材料往往同时受到多种应力的作用,因此需要对应力状态进行综合分析。
其次,我们将对应力状态进行分类。
根据应力的作用方向和大小,可以将应力状态分为拉应力状态、压应力状态和剪应力状态三种基本类型。
拉应力状态是指材料内部受到拉力作用的状态,压应力状态是指材料内部受到压力作用的状态,而剪应力状态是指材料内部受到剪切力作用的状态。
这三种应力状态在工程实践中都具有重要的意义,需要我们进行深入的分析和研究。
接下来,我们将介绍应力状态分析的方法。
应力状态分析的方法有很多种,常用的有应力分析法、应变分析法和能量方法等。
应力分析法是通过应力分布的计算和分析来揭示应力状态的特征,应变分析法则是通过应变分布的计算和分析来揭示应力状态的特征,而能量方法则是通过能量原理和平衡条件来揭示应力状态的特征。
这些方法各有特点,可以根据具体情况选择合适的方法进行分析。
最后,我们需要注意的是,在进行应力状态分析时,需要考虑材料的本构关系、边界条件和载荷情况等因素,以确保分析结果的准确性和可靠性。
同时,还需要注意应力状态分析的结果对工程实践的指导意义,以便更好地指导工程设计和材料选用。
总之,材料力学应力状态分析是一个复杂而重要的课题,需要我们进行深入的研究和分析。
只有深入理解应力状态的特征和规律,才能更好地指导工程实践,为实际工程问题的解决提供科学依据。
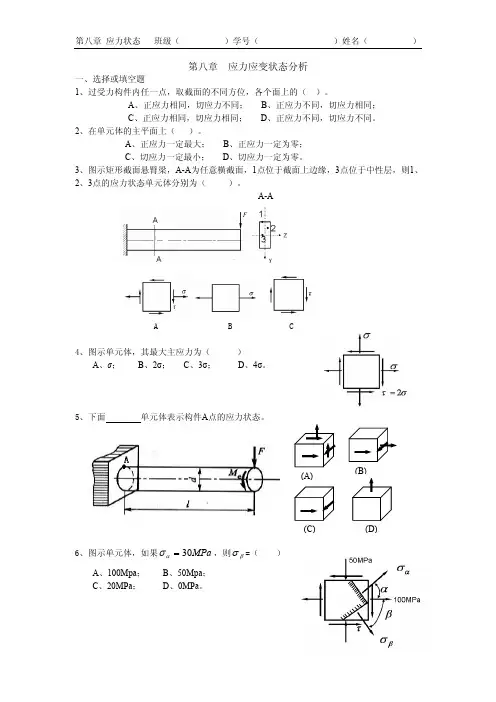
第八章 应力应变状态分析一、选择或填空题1、过受力构件内任一点,取截面的不同方位,各个面上的( )。
A 、正应力相同,切应力不同;B 、正应力不同,切应力相同;C 、正应力相同,切应力相同;D 、正应力不同,切应力不同。
2、在单元体的主平面上( )。
A 、正应力一定最大;B 、正应力一定为零;C 、切应力一定最小;D 、切应力一定为零。
3、图示矩形截面悬臂梁,A-A 为任意横截面,1点位于截面上边缘,3点位于中性层,则1、2、3点的应力状态单元体分别为( )。
A-AA B C4、图示单元体,其最大主应力为( )A 、σ;B 、2σ;C 、3σ;D 、4σ。
5、下面 单元体表示构件A 点的应力状态。
6、图示单元体,如果MPa 30=ασ,则βσ=( ) A 、100Mpa ; B 、50Mpa ; C 、20MPa ; D 、0MPa 。
(C)7、图示单元体应力状态,沿x 方向的线应变εx 可表示为( )A 、Eyσ; B 、)(1y x E μσσ−;C 、)(1x y E μσσ− ;D 、Gτ。
8、图示应力圆对应于单元体( )。
9、已知单元体及应力圆如图所示,σ1所在主平面的法线方向为( )。
A 、n 1;B 、 n 2;C 、n 3;D 、n4。
二、计算题1、已知应力状态如图所示,试用解析法计算图中指定截面上的正应力和切应力。
2、试画图示应力状态的三向应力圆,并求主应力、最大正应力和最大切应力。
3、边长为20mm的钢立方块置于刚性模中,在顶面受力F=14kN作用。
已知材料的泊松比为0.3,求立方体各个面上的正应力。
4、图示矩形截面梁某截面上的弯矩和剪力分别为M=10 kN.m,Q=120 kN。
试绘出截面上1、2、3、4各点的应力状态单元体,并求其主应力。
第九章 强度理论一、选择题或填空题 1、在冬天严寒天气下,水管中的水会受冻而结冰。
根据低温下水管和冰所受力情况可知( )。
A 、冰先破裂而水管完好;B 、水管先破裂而冰完好;C 、冰与水管同时破裂;D 、不一定何者先破裂。