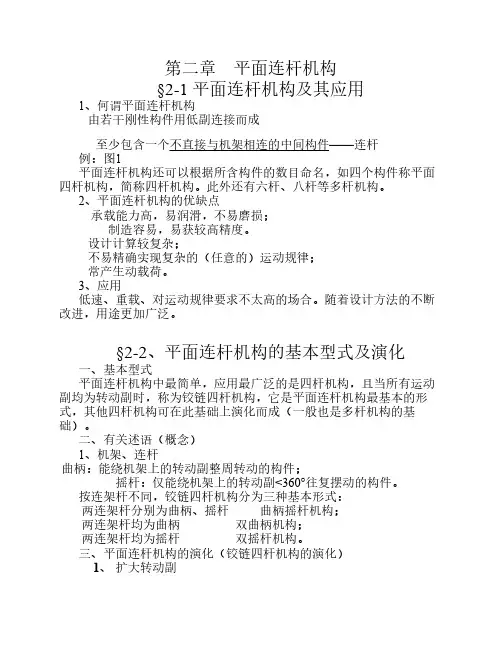
平面六杆机构
- 格式:doc
- 大小:609.04 KB
- 文档页数:16
平面六杆机构课程设计一、课程目标知识目标:1. 让学生掌握平面六杆机构的基本构成和特点,理解其运动规律和动力学特性。
2. 使学生了解平面六杆机构在实际工程中的应用,并能结合具体案例进行分析。
3. 帮助学生理解平面六杆机构与其他类型机构之间的区别与联系。
技能目标:1. 培养学生运用平面六杆机构进行简单机构设计的能力,能够根据实际需求进行参数优化。
2. 提高学生运用计算机软件(如CAD等)进行平面六杆机构运动仿真和分析的能力。
3. 培养学生运用数学工具对平面六杆机构进行运动学和动力学计算的能力。
情感态度价值观目标:1. 培养学生对机械设计学科的兴趣和热情,激发其创新意识和探索精神。
2. 培养学生具备良好的团队合作精神和沟通能力,使其在项目实践中能够相互协作、共同进步。
3. 引导学生关注我国机械工程技术的发展,培养其爱国情怀和社会责任感。
本课程针对高年级学生,结合学科特点和教学要求,将目标分解为具体的学习成果,以使学生能够在实际操作中掌握平面六杆机构的相关知识,提高综合运用能力。
在教学过程中,注重理论联系实际,充分调动学生的主观能动性,培养其创新意识和实践能力。
通过本课程的学习,使学生能够为今后的机械设计工作打下坚实基础。
二、教学内容1. 平面六杆机构基本概念:介绍平面六杆机构的定义、分类及其应用场景,对应教材第二章第一节。
- 六杆机构的构成与特点- 六杆机构的运动副类型及功能2. 平面六杆机构运动分析:- 分析平面六杆机构的运动规律,对应教材第二章第二节;- 掌握平面六杆机构的自由度和速度、加速度的计算方法。
3. 平面六杆机构动力学分析:- 动力学基本方程及其应用,对应教材第二章第三节;- 力、力矩和功率的计算方法。
4. 平面六杆机构设计方法:- 介绍平面六杆机构设计的基本原则和步骤,对应教材第二章第四节;- 结合实际案例,进行参数设计和优化。
5. 计算机辅助设计与分析:- 利用CAD软件进行平面六杆机构建模和运动仿真,对应教材第二章第五节;- 学会对仿真结果进行分析和优化。
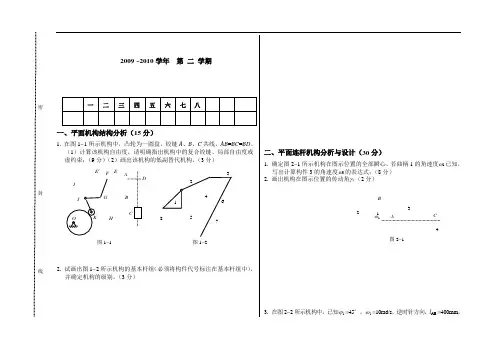
2009 ~2010学年 第 二 学期一 二 三 四 五 六 七 八一、平面机构结构分析(15分)1. 在图1-1所示机构中,凸轮为一圆盘,铰链A 、B 、C共线,AB =BC =BD 。
(1)计算该机构自由度,请明确指出机构中的复合铰链、局部自由度或虚约束;(9分)(2)画出该机构的低副替代机构。
(3分)2. 试画出图1-2所示机构的基本杆组(必须将构件代号标注在基本杆组中),并确定机构的级别。
(3分)二、平面连杆机构分析与设计(30分)1. 确定图2-1所示机构在图示位置的全部瞬心。
若曲柄1的角速度ω1已知,写出计算构件3的角速度ω3的表达式;(8分)2. 画出机构在图示位置的传动角γ;(2分)3. 在图2-2所示机构中,已知1ϕ=45°,1ω=10rad/s ,逆时针方向,l AB =400mm ,封线密15 2 467 38 图1-24C B132ω1A图2-1B DC A J F E ' IG K O H 图1-1 Eγ=60°,试用相对运动图解法求构件2的角速度2ω、构件3的速度v 3和加速度a 3(要求列出矢量方程,画出速度多边形和加速度多边形);(10分)4.给定摇杆长度及两极限位置如图2-3所示,图中,μl =0.002m/mm ,要求机构的行程速比系数K =1.5,机架长度l AD =45mm ,试设计曲柄摇杆机构(直接在图2-3上作图,保留作图线,求出l AB 和l BC 的值)。
(10分)三、凸轮机构分析(10分)1. 试在图3中画出凸轮的理论轮廓曲线、基圆、从动件的最大行程h 、凸轮逆时针转至轮廓线上点A (点A 位于凸轮轮廓线的直线段上)与滚子接触时,从动件位移s 和机构压力角α;(6分)2. 凸轮的推程角Φ =?、回程角Φ'=?(4分)四、齿轮机构参数计算(10分)在图4所示齿轮机构中,己知各直齿圆柱齿轮模数均为2mm ,各轮的齿数分别为:z 1=15,z 2=32,z 2'=20,z 3=30。
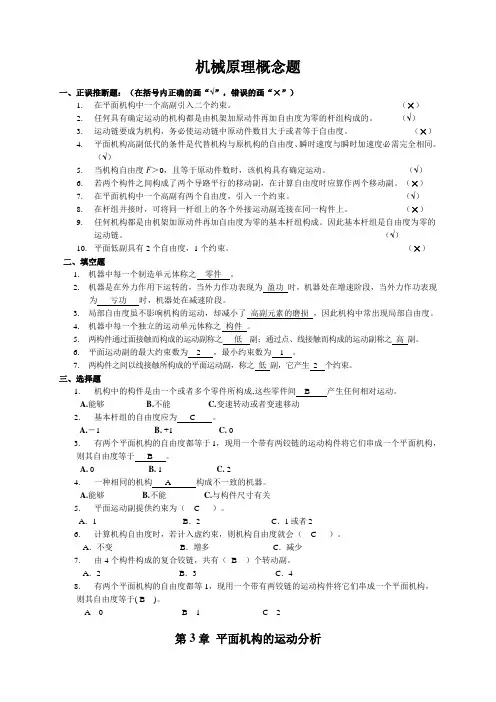
机械原理概念题一、正误推断题:(在括号内正确的画“√”,错误的画“×”)1.在平面机构中一个高副引入二个约束。
(×)2.任何具有确定运动的机构都是由机架加原动件再加自由度为零的杆组构成的。
(√)3.运动链要成为机构,务必使运动链中原动件数目大于或者等于自由度。
(×)4.平面机构高副低代的条件是代替机构与原机构的自由度、瞬时速度与瞬时加速度必需完全相同。
(√)5.当机构自由度F>0,且等于原动件数时,该机构具有确定运动。
(√)6.若两个构件之间构成了两个导路平行的移动副,在计算自由度时应算作两个移动副。
(×)7.在平面机构中一个高副有两个自由度,引入一个约束。
(√)8.在杆组并接时,可将同一杆组上的各个外接运动副连接在同一构件上。
(×)9.任何机构都是由机架加原动件再加自由度为零的基本杆组构成。
因此基本杆组是自由度为零的运动链。
(√)10.平面低副具有2个自由度,1个约束。
(×)二、填空题1.机器中每一个制造单元体称之零件。
2.机器是在外力作用下运转的,当外力作功表现为盈功时,机器处在增速阶段,当外力作功表现为亏功时,机器处在减速阶段。
3.局部自由度虽不影响机构的运动,却减小了高副元素的磨损,因此机构中常出现局部自由度。
4.机器中每一个独立的运动单元体称之构件。
5.两构件通过面接触而构成的运动副称之低副;通过点、线接触而构成的运动副称之高副。
6.平面运动副的最大约束数为 2 ,最小约束数为1。
7.两构件之间以线接触所构成的平面运动副,称之低副,它产生2 个约束。
三、选择题1.机构中的构件是由一个或者多个零件所构成,这些零件间 B 产生任何相对运动。
A.能够B.不能C.变速转动或者变速移动2.基本杆组的自由度应为 C 。
A.-1B. +1C. 03.有两个平面机构的自由度都等于1,现用一个带有两铰链的运动构件将它们串成一个平面机构,则其自由度等于 B 。

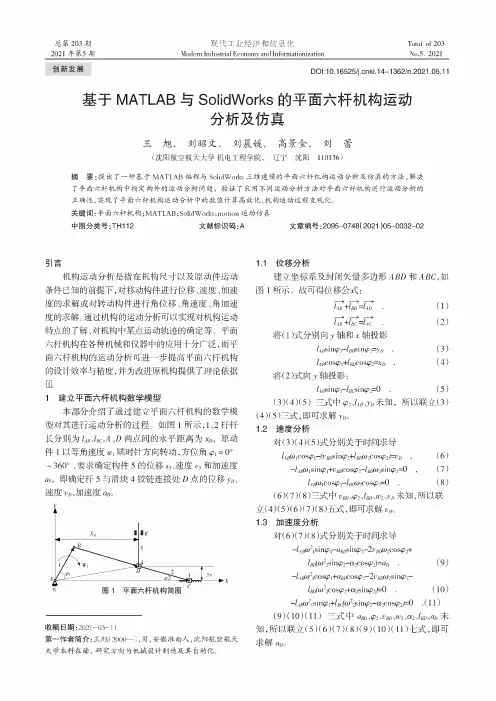
机械原理课程设计说明书题目:平面六杆机构机械工程及自动化专业2012年6月28日1、题目说明图(a )为一平面六杆机构,主动件1的杆长1r =AB=0.122m ,角速度1=10rad/s ω,机架6上的1=AC=0.280m h ,2=0.164m h ,比例尺L μ=实际尺寸/图上尺寸=2。
图(a )平面六杆机构试用相对运动图解法求移动从动件5的速度5V 与加速度5a 。
2、设计数据 1)位置分析作机构位置运动简图,由图(a-1)得导杆3上B 、C 两点之间的图上长度0.182BC m =C 、D 两点之间的图上长度0.853CD m =B 、C 两点之间的实际长度0.364BC L m =C 、D 两点之间的实际长度0.171CD L m =图(a-1)机构位置运动简图从图(a-1)中量取516.28mm=32.56mm L S μ=⨯2)速度分析根据两构件上重合点之间的速度合成原理,得导杆3上的点与滑块2上的点之间的速度方程为B3V = B2V + B3B2V1BA : //: ? ?BC BA CB ωl ⊥⊥方向大小其中,取速度比例尺V μ=实际速度(mm/s)/图上尺寸(mm)=10。
在机构图附近的合适位置作速度图,取任意一点p 作为作图的起点,作2pb AB ⊥, 由532.56mm S =211V pb r μω=,得211/100.122/100.122122V pb r m mm ωμ==⨯==,作3pb BC ⊥,作23//b b CD ,得交点3b ,如图(b-2)所示。
从图(b-2)中量取3940.094pb mm m ==, 2377.10.0771b b mm m ==。
由33V BC pb L μω=,得33/0.09410/0.364 2.582/V BC pb L rad s ωμ==⨯=,方向为逆时针; 由3232V B B b b V μ=,得相对速度32320.0771100.771/B B V V b b m s μ==⨯=。
目录第一部分:六杆机构运动与动力分析一.机构分析分析类题目 3 1分析题目 32.分析内容 3 二.分析过程 4 1机构的结构分析 42.平面连杆机构运动分析和动态静力分析 53机构的运动分析8 4机构的动态静力分析18 三.参考文献21第二部分:齿轮传动设计一、设计题目22二、全部原始数据22三、设计方法及原理221传动的类型及选择22 2变位因数的选择22四、设计及计算过程241.选取两轮齿数242传动比要求24 3变位因数选择244.计算几何尺寸25 五.齿轮参数列表26 六.计算结果分析说明28 七.参考文献28第三部分:体会心得29一.机构分析类题目3(方案三)1.分析题目对如图1所示六杆机构进行运动与动力分析。
各构件长度、构件3、4绕质心的转动惯量如表1所示,构件1的转动惯量忽略不计。
构件1、3、4、5的质量G1、G3、G4、G5,作用在构件5上的阻力P工作、P空程,不均匀系数δ的已知数值如表2所示。
构件3、4的质心位置在杆长中点处。
2.分析内容(1)对机构进行结构分析;(2)绘制滑块F的运动线图(即位移、速度和加速度线图);(3)绘制构件3角速度和角加速度线图(即角位移、角速度和角加速度线图);(4)各运动副中的反力;(5)加在原动件1上的平衡力矩;(6)确定安装在轴A上的飞轮转动惯量。
图1 六杆机构方案号L DF(mm)L CE(mm)L CD(mm)L AB(mm)L AC(mm)n1r/minJ S3kg.m2J S4kg.m23 510 575 170 140 375 80 0.22 0.16方案号G1(kg)G3(kg)G4(kg)G5(kg)P工作(N)P空程(N)δ3 14 75 55 80 1400 140 1/40二.分析过程:通过CAD制图软件制作的六杆机构运动简图:图2 六杆机构CAD所做的图是严格按照题所给数据进行绘制的。
并机构运动简图中活动构件的序号从1开始标注,机架的构件序号为0。
平面六杆机构运动分析平面六杆机构的结构由六个连杆组成,其中包括三个固定连杆和三个可动连杆。
固定连杆通常被称为定态杆,可动连杆则被称为转动杆。
根据转动杆的数量和连杆相互连接的方式,平面六杆机构可以分为多种类型,如四杆机构、多杆机构等。
在运动分析中,首先需要确定平面六杆机构的运动副,即确定机构中的可动部分和约束部分。
在平面六杆机构中,三个固定连杆固定在轴上,不发生相对运动,因此构成了三个约束副。
而另外三个可动连杆可以沿着其中一方向进行平移或转动,从而实现不同的运动形式。
平面六杆机构的运动是通过连杆相互连接而实现的。
连杆之间的连接点称为铰链,铰链的位置确定了连杆之间的运动关系。
根据铰链的位置不同,连杆之间可以形成不同的树状结构,如三杆树状结构、四杆树状结构等。
通过这些连杆和铰链的组合,平面六杆机构可以实现复杂的运动路径和运动轨迹。
在几何分析中,可以利用连杆的长度和连接点位置来确定连杆的运动范围和运动路径。
通过使用向量和矩阵的运算,可以推导出连杆的运动方程和运动状态方程。
这些方程可以用来描述连杆的位移、速度和加速度,并进一步分析机构的运动性能和稳定性。
在力学分析中,可以应用牛顿定律和动力学原理来分析连杆之间的力学关系和力学性能。
通过建立连杆之间的功率传递和力矩平衡方程,可以计算出机构的输入功率和输出功率,并进一步分析机构的能量转换和运动效率。
平面六杆机构的运动分析在工程设计中具有广泛的应用。
它可以用来实现复杂的运动路径和运动轨迹,广泛应用于各种机械设备和机器人的设计中。
例如,在运动控制领域,平面六杆机构可以用来控制机械臂的运动轨迹和末端位置,实现精确的定位和操作。
在工业自动化领域,平面六杆机构可以用来控制机器人的运动路径和运动速度,实现灵活的操作和自动化生产。
总而言之,平面六杆机构是一种重要的机械结构,它可以实现复杂的运动功能和运动轨迹。
通过几何分析和力学分析,可以对平面六杆机构的运动进行详细的分析和研究。
平面六杆机构的运动分析摘要:本论文首先对平面四杆机构进行运动分析,再对平面六杆机构进行运动分析,进而分析了平面六杆机构的动力性能,最后运用运动仿真软件Visual Basic6.0对平面四杆机构和平面六杆机构进行运动模拟仿真。
我们通过对平面四杆机构和平面六杆机构连杆的运动进行系统地深入分析,从而获得平面连杆机构运动性能,进而达到对平面连杆机构的动力性能分析的目的。
为了使研究结果更加形象生动,我们运用Visual Basic6.0来模拟平面四杆机构和平面六杆机构的运动的过程,并且得出连杆的运动曲线图及其它相关结果。
本文的主要特色是在各个设计进度中将会大量应用计算机高级语言Visual Basic编程来模拟平面四杆机构和六杆机构平面连杆机构的运动学分析的过程,包括建立运动约束方程和解方程两部分。
模拟的原理是借助于连杆机构设计的解析法,利用时钟控件来循环改变直线或圆的坐标,实现动画仿真功能,同时我们可以进一步分析和检查平面连杆机构的位移、速度和加速度等运动特性的正确性。
通过这些我们便可以得到平面连杆机构的力学性能,从而达到本文的目的。
关键词:连杆机构运动分析动力性能 Visual Basic仿真指导老师签名:The Dynamic Behavior Analysis of Planar LinkageAbstract: This paper analyzes the motion of planar four-bar linkage at first, then it analyzes the motion of planar six-bar linkage. After that ,it does analysis of the dynamic performance of plane six-bar linkage. Finally, it simulates the campaign of planar four-bar linkage and plane six-bar agencies, using a simulation software -- visual basic 6.0.After systematically and analyzed plane four-bar and plane six-bar linkage in depth, we obtained the campaign performance of planar linkage mechanism. By this we achieved the purpose of analyzing the dynamic behavior of planar linkage mechanism. In order to make the study results more vivid and to obtain the linkage’s campaign curves and ot her related results ,we use visual basic 6.0 to simulate the campaign process of plane four-bar and plane six-bar linkage mechanism. The main special features in each design progress lieutenant general and will apply deluxe language Microsoft Visual Basic of calculator in great quantities, to imitate planar four-bar linkage mechanism and planar six-bar linkage mechanism to get analytical process of the kinetics of the linkage mechanism, include the establishment move control formula and reach agreement formula two parts. Principle of imitate is ask for help from linkage mechanism design of resolution method, make use of clock to control a piece to come to circulating change straight line or sit a mark roundly, carry out an animation to imitate true function。
连杆机构的概述、特点和功能一、概述连杆机构是由若干构件用低副(转动副、移动副、球面副、球销副、圆柱副及螺旋副等)联结而成,故又称低副机构。
连杆机构常用于刚体导引、实现已知运动规律或已知轨迹。
根据构件之间的相对运动为平面运动或空间运动,连杆机构可分为平面连杆机构和空间连杆机构。
根据机构中构件数目的多少分为四杆机构、五杆机构、六杆机构等,一般将五杆及五杆以上的连杆机构称为多杆机构。
当连杆机构的自由度为1时,称为单自由度连杆机构;当自由度大于1时,称为多自由度连杆机构。
根据形成连杆机构的运动链是开链还是闭链,亦可将相应的连杆机构分为开链连杆机构(机械手通常是运动副为转动副或移动副的空间开链连杆机构)和闭链连杆机构。
单闭环的平面连杆机构的构件数至少为4,因而最简单的平面闭链连杆机构是四杆机构,其他多杆闭链机构无非是在其基础上扩充杆组而成;单闭环的空间连杆机构的构件数至少为3,因而可由三个构件组成空间三杆机构。
连杆机构使用实例如图:二、平面连杆机构的特点优点:(1)运动副形状简单,易制造;(2)面接触,承载能力大,可承受冲击力,应用实例:冲床;(3)实现远距离传动或操纵,应用实例:自行车手闸;(4)实现多样的运动轨迹连杆上不同点的轨迹(5)构件运动形式多样性连杆构件可以实现往复移动之间的相互转换,构件具有多种运动形式;雷达天线仰俯机构牛头刨床刨削机构内燃机曲柄连杆机构(6)改变构件相对长度,可实现不同的运动规缺点:(1)连杆机构不适于高速场合;(2)连杆机构中运动的传递要经过中间构件,运动传递的积累误差较大。
三、平面连杆机构的功能(1)实现有轨迹、位置或运动规律的运动;(2)实现从动件运动形式及运动特性的改变;(3)实现较远距离的传动;(4)调节、扩大从动件行程;(5)获得较大的机械增益。
机械原理大作业1报告名称平面连杆机构的运动分析学院机电学院专业机械设计制造及其自动化班级 05021001学号 2010301173姓名覃福铁同组人员勾阳采用数据第一组(1-A)平面六杆机构1.题目要求2.题目分析(1)建立封闭图形: L 1 + L 2= L 3+ L 4L 1 + L 2= L 5+ L 6+AG(2) 机构运动分析 a 、角位移分析由图形封闭性得:⎪⎪⎩⎪⎪⎨⎧⋅-⋅+=+-⋅-⋅+⋅⋅-⋅+=+-⋅-⋅+⋅⋅=⋅+⋅+⋅=⋅+⋅55662'2221155662'222113322114332211sin sin )sin(sin sin cos cos )cos(cos cos sin sin sin cos cos cos θθθαπθθθθθαπθθθθθθθθL L y L L L L L x L L L L L L L L L L G G 将上式化简可得:⎪⎪⎩⎪⎪⎨⎧=⋅-⋅+-⋅+⋅-=⋅-⋅+-⋅+⋅⋅-=⋅-⋅⋅-=⋅-⋅G G y L L L L L x L L L L L L L L L L L 66552'233466552'2331133221143322sin sin )sin(sin cos cos )cos(cos sin sin sin cos cos cos θθαθθθθαθθθθθθθθb 、角速度分析上式对时间求一阶导数,可得速度方程:⎪⎪⎩⎪⎪⎨⎧=⋅⋅-⋅⋅+⋅-⋅+⋅⋅=⋅⋅+⋅⋅-⋅-⋅-⋅⋅-⋅⋅-=⋅⋅-⋅⋅⋅⋅=⋅⋅+⋅⋅-0cos cos )cos(cos 0sin sin )sin(sin cos cos cos sin sin sin 66655522'233366655522'2333111333222111333222ωθωθωαθωθωθωθωαθωθωθωθωθωθωθωθL L L L L L L L L L L L L L 化为矩阵形式为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅-⋅⋅=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅-⋅⋅-⋅⋅⋅-⋅--⋅-⋅-⋅⋅⋅-00cos sin cos cos cos )cos(sin sin sin )sin(00cos cos 00sin sin 1111165326655332'26655332'233223322θθωωωωωθθθαθθθθαθθθθθL L L L L L L L L L L L L L c 、角加速度分析:矩阵对时间求一阶导数,可得加速度矩阵为:2233222333'223355665'22335566622332233'22sin sin 0cos cos 00sin()sin sin sin cos()cos cos cos cos cos 00sin sin 00cos(L L L L L L L L L L L L L L L L L θθεθθεθαθθθεθαθθθεθθθθθα-⋅⋅⎡⎤⎡⎤⎢⎥⎢⎥⋅-⋅⎢⎥⎢⎥⋅=⎢⎥⎢⎥-⋅--⋅-⋅⋅⎢⎥⎢⎥⋅-⋅⋅-⋅⎣⎦⎣⎦-⋅⋅-⋅⋅⋅-211221123123355665'2223355666cos sin )cos cos cos 0sin()sin sin sin 0L L L L L L L L L θωθωωθθθωθαθθθω⎡⎤⋅⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⋅⎢⎥⎢⎥⎢⎥⋅+⋅⎢⎥⎢⎥⎢⎥⋅⋅-⋅⎢⎥⎢⎥⎢⎥⋅-⋅⋅-⋅⎢⎥⎣⎦⎣⎦⎣⎦d 、E 点的运动状态位移:⎩⎨⎧⋅-⋅+=⋅-⋅+=55665566sin sin cos cos θθθθL L y y L L x x G EG E速度:⎪⎩⎪⎨⎧⋅⋅-⋅⋅=⋅⋅+⋅⋅-=555666555666cos cos sin sin ωθωθωθωθL L v L L v yx E E 加速度:⎪⎩⎪⎨⎧⋅⋅-⋅⋅+⋅⋅+⋅⋅-=⋅⋅+⋅⋅+⋅⋅-⋅⋅-=5552555666266655525556662666cos sin cos sin sin cos sin cos εθωθεθωθεθωθεθωθL L L L a L L L L a y x E E3.用solideworks 开发4.装备体动画截图5.计算结果 (1):各杆角位移(2):各杆角速度(3)各杆角加速度(4)E点位移(5)E点速度(6)E点加速度(7)E点轨迹6.本次大作业的心得体会:作为一名机械设计制造专业的学生,学好机械原理是非常重要的,而这次通过做机械原理大作业使我受益匪浅。
机械原理大作业平面六杆机构的运动分析(题号:)班级:05021004组员:唐岁迎-2010301238万琦-2010301239成绩:完成日期:年月日平面连杆机构的运动分析1.题目及原始数据图示为一平面六杆机构。
设已知各构件的尺寸如表1所示,又知原动件1以角速度ω1=1 rad/s沿逆时针方向回转,试求各从动件的角位移、角速度、角加速度以及E点的位移、速度及加速度的变化情况。
表1 平面六杆机构的尺寸参数(mm)(1)建立封闭图形:L1 + L2= L3+ L4L 1 + L 2= L 5+ L 6+AG(2) 机构运动分析 a 、角位移分析由图形封闭性得:⎪⎪⎩⎪⎪⎨⎧⋅-⋅+=+-⋅-⋅+⋅⋅-⋅+=+-⋅-⋅+⋅⋅=⋅+⋅+⋅=⋅+⋅55662'2221155662'222113322114332211sin sin )sin(sin sin cos cos )cos(cos cos sin sin sin cos cos cos θθθαπθθθθθαπθθθθθθθθL L y L L L L L x L L L L L L L L L L G G将上式化简可得:⎪⎪⎩⎪⎪⎨⎧=⋅-⋅+-⋅+⋅-=⋅-⋅+-⋅+⋅⋅-=⋅-⋅⋅-=⋅-⋅G G y L L L L L x L L L L L L L L L L L 66552'233466552'2331133221143322sin sin )sin(sin cos cos )cos(cos sin sin sin cos cos cos θθαθθθθαθθθθθθθθb 、角速度分析上式对时间求一阶导数,可得速度方程:⎪⎪⎩⎪⎪⎨⎧=⋅⋅-⋅⋅+⋅-⋅+⋅⋅=⋅⋅+⋅⋅-⋅-⋅-⋅⋅-⋅⋅-=⋅⋅-⋅⋅⋅⋅=⋅⋅+⋅⋅-0cos cos )cos(cos 0sin sin )sin(sin cos cos cos sin sin sin 66655522'233366655522'2333111333222111333222ωθωθωαθωθωθωθωαθωθωθωθωθωθωθωθL L L L L L L L L L L L L L化为矩阵形式为:⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅-⋅⋅=⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡⋅-⋅⋅-⋅⋅⋅-⋅--⋅-⋅-⋅⋅⋅-00cos sin cos cos cos )cos(sin sin sin )sin(00cos cos 00sin sin 1111165326655332'26655332'233223322θθωωωωωθθθαθθθθαθθθθθL L L L L L L L L L L L L Lc 、角加速度分析:矩阵对时间求一阶导数,可得加速度矩阵为:2233222333'223355665'22335566622332233'22sin sin 0cos cos 00sin()sin sin sin cos()cos cos cos cos cos 00sin sin 00cos(L L L L L L L L L L L L L L L L L θθεθθεθαθθθεθαθθθεθθθθθα-⋅⋅⎡⎤⎡⎤⎢⎥⎢⎥⋅-⋅⎢⎥⎢⎥⋅=⎢⎥⎢⎥-⋅--⋅-⋅⋅⎢⎥⎢⎥⋅-⋅⋅-⋅⎣⎦⎣⎦-⋅⋅-⋅⋅⋅-211221123123355665'2223355666cos sin )cos cos cos 0sin()sin sin sin 0L L L L L L L L L θωθωωθθθωθαθθθω⎡⎤⋅⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⋅⎢⎥⎢⎥⎢⎥⋅+⋅⎢⎥⎢⎥⎢⎥⋅⋅-⋅⎢⎥⎢⎥⎢⎥⋅-⋅⋅-⋅⎢⎥⎣⎦⎣⎦⎣⎦d 、E 点的运动状态位移:⎩⎨⎧⋅-⋅+=⋅-⋅+=55665566sin sin cos cos θθθθL L y y L L x x G EG E速度:⎪⎩⎪⎨⎧⋅⋅-⋅⋅=⋅⋅+⋅⋅-=555666555666cos cos sin sin ωθωθωθωθL L v L L v yx E E 加速度:⎪⎩⎪⎨⎧⋅⋅-⋅⋅+⋅⋅+⋅⋅-=⋅⋅+⋅⋅+⋅⋅-⋅⋅-=5552555666266655525556662666cos sin cos sin sin cos sin cos εθωθεθωθεθωθεθωθL L L L a L L L L a yx E E3.流程图进入机构仿真模块,进行算例分析,确定原动件,定义运动参数获得整个六连杆相关构件的角位移,角速度,角加速度曲线和详细分析数据,并模拟点E的相关数据结束4.三维六杆机构效果图5.六杆机构运动动画(点击播放) 6.计算结果和曲线图a.计算结果(作业文件中)b.曲线图连杆2曲线图0.000.631.261.882.513.14 3.774.405.02 5.656.28时间(se3443526170角位移 (d-25-15-5515角速度 - Z (d e g /s-31-18-5 821角加速度 - Z (d e g /s e c连杆3曲线图0.000.631.261.882.513.14 3.774.405.02 5.656.28时间(se8091102114125角位移 (d-30-17-5720角速度 - Z (d e g /s-22-6 92440角加速度 - Z (d e g /s e c连杆5曲线图0.000.631.261.882.513.14 3.774.405.02 5.656.28时间(se-66-43-20326角位移 (d-48-10 2865103角速度 - Z (d e g /s-143-58 27112197角加速度 - Z (d e g /s e c连杆6曲线图0.000.631.261.882.513.14 3.774.405.02 5.656.28时间(se-180-91-288177角位移 (d-88-37 1566118角速度 - Z (d e g /s-117-22 73169264角加速度 - Z (d e g /s e cE 点X 、Y 轴速度曲线图0.000.631.261.882.513.14 3.774.405.02 5.656.28时间(se-27-992745质心速度 - X (m m /-30-18-6617质心速度 - Y (m m /0.000.631.261.882.513.14 3.774.405.02 5.656.28时间(se-64-38-121339质心加速度 - X (m m /s e-50-29-81334质心加速度 - Y (m m /s e0.000.631.261.882.513.14 3.774.405.02 5.656.28时间(se103119134149164平动位移 - X5765748290平动位移 - YE点运动轨迹图7、心得体会作为一名机械设计制造专业的学生,学好机械原理是非常重要的,而这次通过做机械原理大作业使我受益匪浅。
首先,作业前对连杆机构的分析,不仅让我们巩固了学习的知识,而且对六杆机构的运动及其特点有了更深的认识,同时,通过和同学的讨论,让我们从新的角度认识了连杆机构,而且增加了我们对机械设计的兴趣。
其次,在作业过程中,大家分工明确,认真合作,让我们体会到了团队合作的力量,认识到了团队的重要性。
最后,学期初的两周上机实验让我们对PRO-E软件有所熟悉,这次作业用到了该软件,使我们对它有了进一步的掌握,并且熟练运用了Microsoft Word, Microsoft Excel等,增加了我们对软件学习的兴趣。
通过此次作业,我们不仅对专业知识进行了更好的学习,认识到了学好专业知识的重要性,同时也锻炼了我们其他方面的能力。
在以后的学习生活中,我们会努力学好专业知识,拓宽自己的视野,提高自己能力!8 参考书孙恒,葛文杰,陈作模,机械原理【M】7版,北京:高等教育出版社2006 陈作模,机械原理学习指南【M】5版,高等教育出版社,2007谭浩强,C语言程序设计(第三版),清华大学出版社,200甘登岱,Pro\E基础与应用野火版3.0精品教程,航空工业出版社,2011。