液压比例与伺服控制系统(2013)
- 格式:ppt
- 大小:10.32 MB
- 文档页数:125
关于液压伺服控制系统的振荡解析作者:刘宝刚来源:《数字技术与应用》2013年第03期关键词:目前的轧钢系统中,对位置控制要求精度高时,普遍采用伺服液压传动。
例如轧机、夹送辊、助卷辊的辊缝控制。
伺服控制有很多电气传动无法比拟的优点,例如:(1)控制精度高,可以达到微米级别。
(2)响应速度快,可以达到毫秒级别。
(3)对设备的冲击小。
所以伺服控制在轧钢领域得到了广泛的应用。
但是,伺服系统也会出现问题,我厂的伺服系统在生产中出现了系统震荡的故障。
以下就震荡的产生和消除进行一下分析。
关键词:液压伺服控制中图分类号:TH137.9 文献标识码:A 文章编号:1007-9416(2013)03-0013-011 伺服系统的工作原理讲到伺服系统,首先要了解伺服阀。
伺服阀是电磁阀的一种。
仍然是动圈式阀门,但在主阀芯内(或外部)有先导阀门,由电磁线圈推动先导阀门动作,主阀芯跟随先导阀芯动作,产生和电磁线圈成比例的阀芯位移,以控制液压管道中液压油的流量。
从而达到控制液压缸的移动速度和距离以及方向。
下面以MOOG阀为例简单介绍伺服阀的结构和工作原理。
如下图,可以看到当电流通过线圈时,首先先导阀芯先动作,(动作的行程和电流成比例)导通控制油路,带动下面的主阀芯,导通主油路。
当然主油路的行程和先导阀芯的行程也成比例关系。
因此可以通过控制阀芯的电流(或电压)来控制伺服阀的通断和流量,从而达到控制液压缸的动作和行程(图1)。
可以看到:整个伺服系统是一个双闭环调节系统,内环由放大器和伺服阀的先导阀芯位置反馈构成。
外环由PLC、CPC单元,磁尺(液压缸的实际行程)反馈构成。
内环完成高速的自适应调节。
外环完成上位机的参考值给定调节。
2 伺服系统震荡的产生原因(1)由于伺服阀在工作时,先导阀芯即使在没有给定的时候也是运动的,通常来说保持高频正弦波震荡,以保证快速响应。
我厂的伺服阀在没有给定的时候处于2000Hz的正弦震荡。
因此,当先导阀芯的芯套边缘部分由于磨损有损伤时,当出现漏油的时候,伺服阀就会出现周期性的震荡。
液压伺服与比例控制系统”课程体系建设与改革摘要:结合“构思—设计—执行—运作”工程教育模式对新型工程人员在知识、技能和实践方面提出的要求,对国家精品课程“液压伺服与比例控制系统”的教学进行改革,分别从课堂教学单元、实践教学单元,课程设计单元,融入新的教学手段,重在加深学生对理论知识的理解深度,培养学生的工程实践能力,增强学生的团队意识。
关键词:“构思—设计—执行—运作”工程教育模式;案例教学法;讨论教学法;工程实践教学法;项目教学国内工科院校培养的本科毕业生,普遍存在重理论轻实践、强调个人学术能力而忽视团队协作精神、重视知识学习而忽视开拓创新精神的培养等问题。
从2005年起,国内多所高校结合我国高等教育的实际情况,积极参与“构思—设计—执行—运作”(Conceive—Design—Implement—Operate,以下简称CDIO)工程教育模式的实践和探索。
CDIO工程教育模式是近年来国际工程教育改革的最新成果。
国内外教学实践表明,其理念和方法是先进可行的,适合工程教育教学过程各个环节。
迄今为止,已有几十所世界著名大学加入了CDIO组织,取得了良好效果,按CDIO模式培养的学生深受社会与企业的欢迎。
“液压伺服与比例控制系统”是国内液压专业非常重要的一门专业课,特点是专业性强、综合性强、理论性强。
多年来,燕山大学机电控制工程专业一直重视该课程教学的改革工作,取得了显著效果,为国家培养了大量优秀工程技术人才。
但是,近几年来,随着社会对该专业学生素质要求的不断提高,仍然暴露出一些问题,比如教学手段相对较为落后,教学过程中理论与实践脱节,忽视学生创新能力和团队意识的培养等。
因此,逐渐出现了学生学习积极性不高、创新能力和团队意识不足等问题。
从2008年开始,该专业开始按CDIO工程教育模式培养学生。
以此为前提,结合“液压伺服与比例控制系统”国家精品课程的建设,课程建设小组通过改革传统教学方法和手段,加强过程管理,实施考核手段和方式的多样化,强化创新与实践能力培养,探索出一套更为完善的课程教学体系。
伺服系统组成与普通液压系统的区别
伺服系统与普通液压系统的组成区别是:伺服控制系统(伺服驱动系统)、伺服电机系统、先进的油泵。
伺服控制系统其实就是伺服控制器,又叫伺服驱动器。
伺服电机系统的实质就是伺服电机。
(莱普乐注塑机节能改造网提供)
伺服运行系统能够达到什么样的效果?电机反映迅速,像注塑机伺服系统就能实现压力和流量的双控制,控制程度更高,注塑机的冷却和保压阶段几乎不要消耗电能,直接降低注塑机电机的耗能(电机耗能占注塑机的60%-80%),实现节能40%-80%,注塑机电机的耗能根据注塑机的需要实现供给,从根本上节能。
伺服系统的最大特点就是电机,伺服电机采用永磁稀土,永磁电机反映更迅速,瞬间达到高转速,像注塑机伺服电机能够达到1500转,所需的时间不到0.03s,剪短了电机的反映时间和生产的时间。
由于伺服电机对油泵的要求比较高,普通液压系统的油泵不能达到这个要求,所以在注塑机节能改造中会把油泵换成齿轮泵。
伺服驱动器是根据伺服电机等配置的。

液压比例伺服阀的工作原理
液压比例伺服阀是一种用于控制液压系统中液压执行元件的阀门。
它的工作原理是通过改变阀芯的位置来调节液压流量和压力,从而控制液压执行元件的运动。
液压比例伺服阀由阀体、阀芯、驱动电磁铁、反馈电位器和控制电路组成。
驱动电磁铁通过控制电路产生电流,电流的大小决定了驱动电磁铁的磁场强度。
当驱动电磁铁通电时,产生的磁场将阀芯吸引或推动,使阀芯的位置发生变化。
阀芯的位置变化会改变阀体内的流道连接情况,从而调节液压流量和压力。
当阀芯向一侧移动时,阀体的流道与液压源连接,液压油通过阀体流道进入液压执行元件,从而产生相应的运动。
当阀芯向另一侧移动时,阀体的流道与液压油回油口连接,液压执行元件的液压油通过回油口排出。
反馈电位器用于检测阀芯的位置,并将位置信息反馈给控制电路。
控制电路根据反馈信息调整驱动电磁铁的电流,使阀芯的位置保持在设定的位置,从而实现对液压执行元件的精确控制。
总的来说,液压比例伺服阀通过改变阀芯的位置,调节液压流量和压力,从而控制液压执行元件的运动。
它具有快速响应、高精度和稳定性好等特点,广泛应用于工程机械、冶金设备、航空航天等领域。
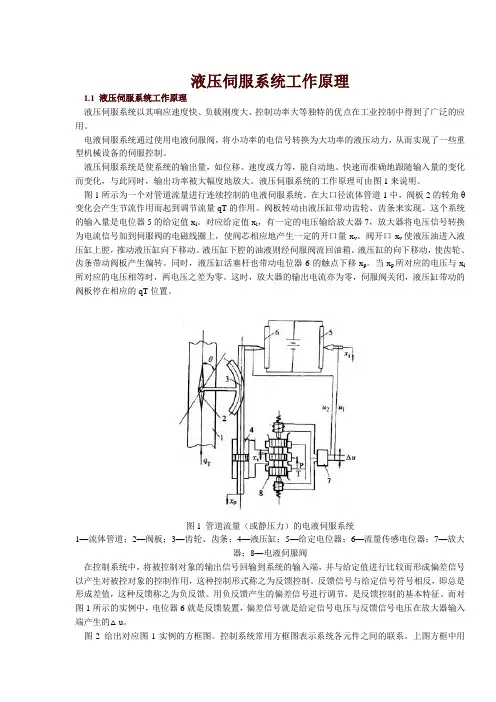
液压伺服系统工作原理1.1 液压伺服系统工作原理液压伺服系统以其响应速度快、负载刚度大、控制功率大等独特的优点在工业控制中得到了广泛的应用。
电液伺服系统通过使用电液伺服阀,将小功率的电信号转换为大功率的液压动力,从而实现了一些重型机械设备的伺服控制。
液压伺服系统是使系统的输出量,如位移、速度或力等,能自动地、快速而准确地跟随输入量的变化而变化,与此同时,输出功率被大幅度地放大。
液压伺服系统的工作原理可由图1来说明。
图1所示为一个对管道流量进行连续控制的电液伺服系统。
在大口径流体管道1中,阀板2的转角θ变化会产生节流作用而起到调节流量qT的作用。
阀板转动由液压缸带动齿轮、齿条来实现。
这个系统的输入量是电位器5的给定值x i。
对应给定值x i,有一定的电压输给放大器7,放大器将电压信号转换为电流信号加到伺服阀的电磁线圈上,使阀芯相应地产生一定的开口量x v。
阀开口x v使液压油进入液压缸上腔,推动液压缸向下移动。
液压缸下腔的油液则经伺服阀流回油箱。
液压缸的向下移动,使齿轮、齿条带动阀板产生偏转。
同时,液压缸活塞杆也带动电位器6的触点下移x p。
当x p所对应的电压与x i 所对应的电压相等时,两电压之差为零。
这时,放大器的输出电流亦为零,伺服阀关闭,液压缸带动的阀板停在相应的qT位置。
图1 管道流量(或静压力)的电液伺服系统1—流体管道;2—阀板;3—齿轮、齿条;4—液压缸;5—给定电位器;6—流量传感电位器;7—放大器;8—电液伺服阀在控制系统中,将被控制对象的输出信号回输到系统的输入端,并与给定值进行比较而形成偏差信号以产生对被控对象的控制作用,这种控制形式称之为反馈控制。
反馈信号与给定信号符号相反,即总是形成差值,这种反馈称之为负反馈。
用负反馈产生的偏差信号进行调节,是反馈控制的基本特征。
而对图1所示的实例中,电位器6就是反馈装置,偏差信号就是给定信号电压与反馈信号电压在放大器输入端产生的△u。
以下为液压伺服阀和比例阀的区别,一起来看看:区别一:伺服阀中位没有死区,比例阀有中位死区;伺服阀的频响(响应频率)更高,可以高达200Hz左右,比例阀一般最高几十Hz;伺服阀对液压油液的要求更高,需要精过滤才行,否则容易堵塞,比例阀要求低一些;阀芯结构及加工精度不同,比例阀采用阀芯+阀体结构,阀体兼作阀套;伺服阀和伺服比例阀采用阀芯+阀套的结构,中位机能种类不同,比例换向阀具有与普通换向阀相似的中位机能,而伺服阀中位机能只有O型;阀的额定压降不同,而比例伺服阀性能介于伺服阀和比例阀之间,比例换向阀属于比例阀的一种,用来控制流量和流向。
区别二:电液比例阀与伺服控制系统中的伺服阀相比,性能在某些方面还有一些差距。
但是电液比例阀抗污染能力强,减少了由于污染而造成的工作故障,可以提高液压系统的工作稳定性和可靠性,更适用于工业过程。
区别三:驱动装置不同。
比例阀的驱动装置是比例电磁铁;伺服阀的驱动装置是力马达或力矩马达;性能参数不同。
滞环、中位死区、频宽、过滤精度等特性不同,因此应用场合不同,伺服阀和伺服比例阀主要应用在闭环控制系统,其它结构的比例阀主要应用在开环控系统及闭环速度控制系统。
液压比例阀:液压比例阀是一种新型的液压控制装置。
在普通压力阀、流量阀和方向阀上,用比例电磁铁替代原有的控制部分,按输入的电气信号连续地、按比例地对油流的压力、流量或方向进行远距离控制。
比例阀一般都具有压力补偿性能,输出压力和流量可以不受负载变化的影响。
伺服阀:液控伺服阀主要是指电液伺服阀,它在接受电气模拟信号后,相应输出调制的流量和压力。
它既是电液转换元件,也是功率放大元件,它能够将小功率的微弱电气输入信号转换为大功率的液压能(流量和压力)输出。
在电液伺服系统中,它将电气部分与液压部分连接起来,实现电液信号的转换与液压放大。
电液伺服阀是电液伺服系统控制的核心。
1、已知Ps=5MPa,负载力F=1000N,移动速度为v=0.1m/s,活塞直径D=70mm,活塞杆直径d=50mm,流量系数Cd=0.7,采用零开口滑阀,矩形全周开口,阀芯台肩直径dv=2mm,阀芯最大位移Xvm=1mm,油液密度为883kg/m3,试确定此阀控对称缸系统能否正常工作?2、控制双出杆油缸的零开口四通滑阀,全周开口,阀芯直径d=12mm,供油压力Ps=4Mpa,动力粘度µ=1.4×102-Pa.s,径向间隙r=5×106-m,流量系数Cd=0.62,油液密度ρ=900kg/m3。
(1)计算阀的三个零位阀系数(其中压力增益K0p和压力流量系数K0c按经验公式计算);(2)如果负载压力P L=2.6MPa,负载流量Q L=16L/min,计算三个阀系数。
3、阀控液压缸系统,液压缸面积Ap=150×104-m2,活塞行程L=0.8m,阀至液压缸的连接管道长度l=2m,管道截面积a=1.77×104-m2,负载质量mt=2000kg,阀的流量—压力系数K c=5.2×1012-m3/s.Pa。
试求液压固有频率ωh和液压阻尼比ζh。
计算时取βe=700MPa,ρ=870kg/m3。
4、有一阀控液压马达系统,已知:液压马达的排量Dm=6×106-m3/rad,马达容积效率为95%,额定流量为qn =6.66×104-m3/s,额定压力为pn=140×105Pa,高低压腔总容积Vt=3×104-m3。
拖动纯惯性负载,负载转动惯量Jt=0.2Kg.m2,阀的流量增益Kq=4m2/s,流量―压力系数Kc=1.5×1016-m3/s.Pa,液压等效容积弹性模量βe=7×108Pa。
试求出以阀芯位移为输入,液压马达转角为输出的传递函数。
5、有一四边阀控制的双作用缸,直接拖动负载做简谐运动。

燕山大学试卷密封线共 6 页第 1 页
燕山大学试卷密封线共 6 页第 2 页
燕山大学试卷密封线共 6 页第 3 页
燕山大学试卷密封线共 6 页第 4 页
燕山大学试卷密封线共 6 页第 5 页
燕山大学试卷密封线共 6 页第 6 页
燕山大学试卷密封线共 6 页第 1 页
燕山大学试卷密封线共 6 页第 2 页
五、已知阀控缸动力机构如图,假定:活塞处于中位,忽略缸体质量,液压缸内外泄漏和粘性摩擦影响。
写出该动力机构的基本方程。
(6分)
燕山大学试卷密封线共 6 页第 3 页
燕山大学试卷密封线共 6 页第 4 页
燕山大学试卷密封线共 6 页第 5 页
燕山大学试卷密封线共 6 页第 6 页
燕山大学试卷密封线共 6 页第 1 页
燕山大学试卷密封线共 6 页第 2 页
燕山大学试卷密封线共 6 页第 3 页
燕山大学试卷密封线共 6 页第 4 页
燕山大学试卷密封线共 6 页第 5 页
燕山大学试卷密封线共 6 页第 6 页
燕山大学试卷密封线共7 页第 1 页
燕山大学试卷密封线共7 页第 2 页
燕山大学试卷密封线共7 页第 3 页
燕山大学试卷密封线共7 页第 4 页
燕山大学试卷密封线共7 页第 5 页
燕山大学试卷密封线共7 页第 6 页
燕山大学试卷密封线共7 页第7 页
燕山大学试卷密封线共7 页第 1 页
燕山大学试卷密封线共7 页第 2 页
燕山大学试卷密封线共7 页第 3 页
燕山大学试卷密封线共7 页第 4 页
燕山大学试卷密封线共7 页第 5 页
燕山大学试卷密封线共7 页第 6 页
燕山大学试卷密封线共7 页第7 页。
第七章液压伺服与比例控制系统基本知识第一节概述液压传动的三个阶段:开关控制、伺服控制和比例控制。
在普通液压传动系统应用中,控制方式无论是采用手动、电磁、电液等形式,还是采用计算机或可编程控制器(PLC),都属于开关式点位控制方式,控制精度和调节性能不高。
狭义上讲,伺服系统是指输出能以一定精度跟随输入的位置控制系统。
目前常把各种机械量(位移、速度和力)的自动控制系统统称为伺服系统。
故液压伺服系统是指以液压为动力的机械量自动控制系统。
系统中信号的传输和控制部分如采用电气,则为电液伺服系统,也属于液压伺服系统的范畴。
和电气伺服系统相比,液压伺服系统具有体积小、重量轻、响应快等优点。
液压伺服控制组成框图(图7-1)指令元件:按要求给出控制信号的器件,如计算机、可编程控制器、指令电位器或其它电器等;检测反馈元件:检测被控制量,给出系统的反馈信号,如各种类型的传感器;比较元件:把具有相同形式和量纲的输入控制信号与反馈信号加以比较,给出偏差信号。
比较元件有时不一定单独存在,而是与指令元件反馈检测元件及放大器组合在一起,由一个结构元件完成;放大、转换和控制元件:将偏差信号放大,并作为能量形式转换(电—液;机—液等),变成液压信号,去控制执行元件(液压缸、液压马达等)运动。
一般是放大器、伺服阀、电液伺服阀等;执行元件:直接对被控对象起作用的元件。
如液压缸、液压马达等;被控对象:液压系统的控制对象,一般是各类负载装置。
按被控制量是否被检测与反馈:开环控制系统,闭环控制系统。
按液压控制元件的不同:阀控系统,泵控系统。
按信号产生和传递方式的不同:机械—液压伺服系统,电气—液压伺服系统。
按被控对象的不同:流量控制,压力控制,位置控制,速度控制,复合控制。
按输入信号的变化规律:定值控制,程序控制,伺服控制。
液压伺服控制系统的优点:系统刚度大、控制精度高、响应速度快,可以快速启动、停止和反向。
缺点:其控制元件(只要是各类伺服阀)和执行元件因为加工精度高,所以价格贵、怕污染,对液压油的要求高。
伺服控制器与液压控制系统的配合使用方法伺服控制器和液压控制系统是工业自动化领域中常见的两种控制设备,它们在不同的工作环境和场景中有着各自的优势和特点。
为了更好地发挥它们的作用,我们需要合理地配合使用这两种控制设备。
本文将介绍伺服控制器与液压控制系统的配合使用方法,包括选择合适的设备、搭建系统框架、调试和优化等方面。
首先,在配合使用伺服控制器和液压控制系统之前,我们需要了解它们各自的特点和适用范围。
伺服控制器是一种通过位置、速度和力等信号来控制电机运动的设备,它能够实现精准的运动控制和位置定位。
而液压控制系统则是通过控制液压执行器的液压压力和流量来实现负载的控制和运动。
它具有承载能力强、高速高力等特点。
因此,当工作需要精准位置控制和快速高力运动时,可以考虑使用伺服控制器;而当工作需要大承载能力和高速高力时,可以选择液压控制系统。
选择合适的设备是配合使用伺服控制器和液压控制系统的第一步。
在选择伺服控制器时,需要考虑工作负载的特点和运动要求,确定所需的控制精度、速度和扭矩等参数。
同时,还需考虑电机的型号和功率等因素。
对于液压控制系统,则需要根据工作负载的特点和要求,选择合适的液压执行器、泵和阀等元件。
在选择设备时,可以咨询专业的技术人员或厂家,以确保选择的设备能够满足工作需求。
搭建系统框架是配合使用伺服控制器和液压控制系统的关键步骤。
在搭建系统框架时,需要将伺服控制器与液压控制系统紧密结合,使其能够协同工作。
首先,需要将伺服控制器与电机连接,并设置合适的运动参数和控制模式。
然后,将液压执行器与液压控制系统连接,确保液压控制系统能够正常工作。
最后,通过电气和液压连接,将伺服控制器和液压控制系统整合在一起,形成完整的控制系统。
在搭建系统框架时,需要注意各个部件之间的连接正确可靠,并确保电气和液压系统的安全。
调试和优化是配合使用伺服控制器和液压控制系统的重要环节。
在调试时,首先需要对伺服控制器和液压控制系统进行独立的测试,确保其正常工作。