机械设计基础-(第五版)讲义10[80P][3.19MB]
- 格式:pdf
- 大小:3.19 MB
- 文档页数:80
机械设计基础(第五版)课后习题答案(完整版)时间:2021.03.12 创作:欧阳文杨可竺、程光蕴、李仲生主编1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图 1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件 1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件 3的速度为:,方向垂直向上。
1-15解要求轮 1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解( 1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
( 2)图b中的 CD 杆是虚约束,去掉与否不影响机构的运动。
故图 b中机构的自由度为:所以构件之间能产生相对运动。
题 2-1答 : a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题 2-2解 : 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图 2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合( 1 )、( 2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题 2-3 见图 2.16 。
图 2.16题 2-4解 : ( 1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转 / 分钟题 2-5解 : ( 1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。
前言机械设计基础课程是高等工科学校近机类、非机类专业开设的一门技术基础课。
杨可桢、程光蕴主编的《机械设计基础》, 因其内容精炼、深度适中、重点突出、知识面宽而被众多高等学校作为主要教材在教学中采用。
本书是根据原国家教委颁布的“高等工业学校机械设计基础课程基本要求”, 汇集了编者多年来的教学经验, 在深刻理解机械设计基础课程内容的基础上编写而成的, 是杨可桢、程光蕴主编《机械设计基础》的配套辅导书, 章节顺序和内容体系与教材完全一致, 并涵盖了国内同类教材的重点内容。
本书特点:1 .明确每章的教学基本要求和重点教学内容。
重点介绍基本概念、基本理论、基本分析方法和设计方法。
2 . 建立明晰的知识结构框架。
3 . 考点及经典题型精解。
介绍考点的具体内容,并详尽剖析, 总结解题规律、解题思路、解题技巧。
4 . 详细的课后习题解答。
5 . 自测试题及答案符合考点精神, 便于学习总结和自我检验。
书后附有模拟试题五套。
参加本书编写工作的有: 西安电子科技大学李团结( 第1 , 14章)、西安石油大学秦彦斌(第3 章) 、西安石油大学陆品( 第13章)、西安建筑科技大学史丽晨(第2 , 5 , 7 , 8 , 12 章)、西安建筑科技大学郭瑞峰(第4 , 6 , 9 , 10 , 11 , 15 , 16 , 17 , 18 章及模拟试题)。
全书由郭瑞峰、史丽晨主编。
本书可作为近机类、非机类大学生学习《机械设计基础》课程的参考书, 也可供电大、职大、函大、夜大等相关专业的学生学习使用, 也可作为考研辅导书, 还可供有关教师及工程技术人员参考。
由于编者水平有限, 书中难免有谬误和不妥之处, 敬请读者批评指正。
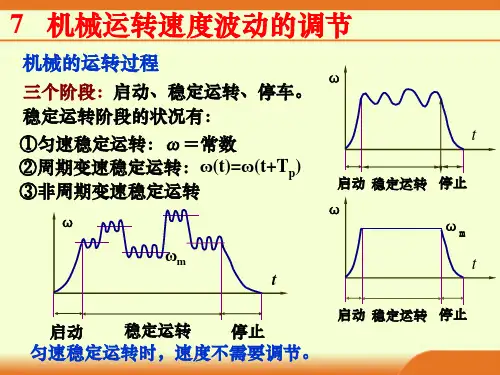
编者2005 年8 月于西安2 机械设计基础导教·导学·导考目录第1 章平面机构的自由度和速度分析⋯⋯⋯⋯⋯⋯11 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1 1 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯6 1 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯61 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯111 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯16第2 章平面连杆机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯202 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯202 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯262 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯272 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯322 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯42第3 章凸轮机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯503 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯503 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯573 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯583 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯673 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯79 第4 章齿轮机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯844 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯844 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯934 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯95 4 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1014 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯108第5 章轮系⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1115 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1115 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1145 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1155 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1185 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯131第6 章间歇运动机构⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1376 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1376 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1406 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1406 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1426 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯144第7 章机械运转速度波动的调节⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯146 7 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1467 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1497 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1497 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯153Ⅱ机械设计基础导教·导学·导考7 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯161第8 章回转件的平衡⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1658 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1658 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1688 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯168 8 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1728 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯183 第9 章机械零件设计概论⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯187 9 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1879 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1949 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯195 9 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯1969 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯206 第10 章联接⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯20910 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯20910 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯21710 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯218 10 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯22410 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯240 第11 章齿轮传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯24311 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯24311 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯25411 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯25511 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯258目录Ⅲ11 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯274第12 章蜗杆传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯27712 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯27712 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯28112 .3 考点及常见题型精解⋯ .⋯ .⋯ .⋯ .⋯ .⋯ .⋯282 12 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯28612 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯293第13 章带传动和链传动⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯29713 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯29713 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯30613 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯30713 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯31613 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯324第14 章轴⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32914 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯32914 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33314 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33414 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯33814 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯347第15 章滑动轴承⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35015 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35015 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35615 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯35715 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯359Ⅳ机械设计基础导教·导学·导考15 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯361第16 章滚动轴承⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯36316 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯36316 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37216 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37316 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯37916 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯386第17 章联轴器、离合器和制动器⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯390 17 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39017 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39217 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39317 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯39617 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯400第18 章弹簧⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40318 .1 重点内容提要⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40318 .2 重点知识结构图⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40818 .3 考点及常见题型精解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯40918 .4 课后习题详解⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯41118 .5 学习效果测试题及答案⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯418附录模拟试题及参考解答⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯420附录A 模拟试题⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯420附录B 模拟试题参考解答⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯439参考文献⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯⋯449目录Ⅴ第1 章平面机构的自由度和速度分析1. 1 重点内容提要1 .1 .1 教学基本要求( 1) 掌握运动副的概念及其分类。
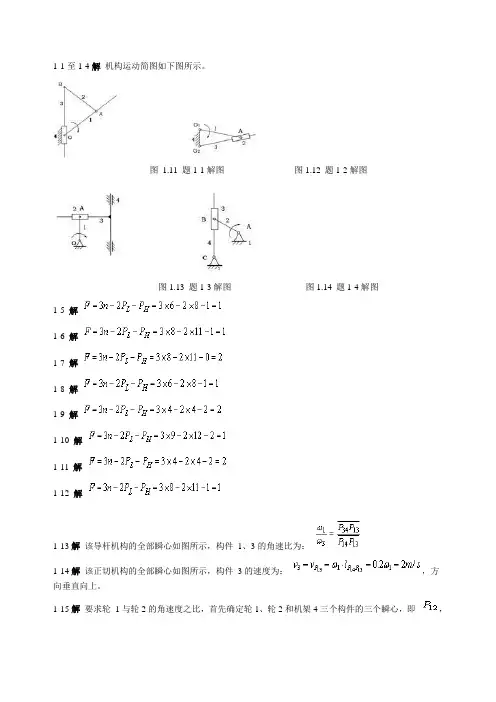
1-1至1-4解机构运动简图如下图所示。
图 1.11 题1-1解图图1.12 题1-2解图图1.13 题1-3解图图1.14 题1-4解图1-5 解1-6 解1-7 解1-8 解1-9 解1-10 解1-11 解1-12 解1-13解该导杆机构的全部瞬心如图所示,构件1、3的角速比为:1-14解该正切机构的全部瞬心如图所示,构件3的速度为:,方向垂直向上。
1-15解要求轮1与轮2的角速度之比,首先确定轮1、轮2和机架4三个构件的三个瞬心,即,和,如图所示。
则:,轮2与轮1的转向相反。
1-16解(1)图a中的构件组合的自由度为:自由度为零,为一刚性桁架,所以构件之间不能产生相对运动。
(2)图b中的CD 杆是虚约束,去掉与否不影响机构的运动。
故图b中机构的自由度为:所以构件之间能产生相对运动。
题2-1答: a ),且最短杆为机架,因此是双曲柄机构。
b ),且最短杆的邻边为机架,因此是曲柄摇杆机构。
c ),不满足杆长条件,因此是双摇杆机构。
d ),且最短杆的对边为机架,因此是双摇杆机构。
题2-2解: 要想成为转动导杆机构,则要求与均为周转副。
( 1 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在中,直角边小于斜边,故有:(极限情况取等号);在中,直角边小于斜边,故有:(极限情况取等号)。
综合这二者,要求即可。
( 2 )当为周转副时,要求能通过两次与机架共线的位置。
见图2-15 中位置和。
在位置时,从线段来看,要能绕过点要求:(极限情况取等号);在位置时,因为导杆是无限长的,故没有过多条件限制。
( 3 )综合(1 )、(2 )两点可知,图示偏置导杆机构成为转动导杆机构的条件是:题2-3 见图 2.16 。
图 2.16题2-4解: (1 )由公式,并带入已知数据列方程有:因此空回行程所需时间;( 2 )因为曲柄空回行程用时,转过的角度为,因此其转速为:转/ 分钟题2-5解: (1 )由题意踏板在水平位置上下摆动,就是曲柄摇杆机构中摇杆的极限位置,此时曲柄与连杆处于两次共线位置。