伺服运动控制分解
- 格式:doc
- 大小:1.74 MB
- 文档页数:13
实验三 伺服电机转角的运动控制1 实验目的:1)了解反馈控制系统的组成;2)了解PID(比例-积分-微分)控制器参数对系统性能的影响;3)熟悉 SIMULINK 的基本操作。
2 实验装置:主计算机、从计算机、小车运动控制装置、互联网3 实验内容及步骤:本实验要求构建反馈控制系统,计算或调节PID 控制器参数,使电机快速准确地运动到某个位置。
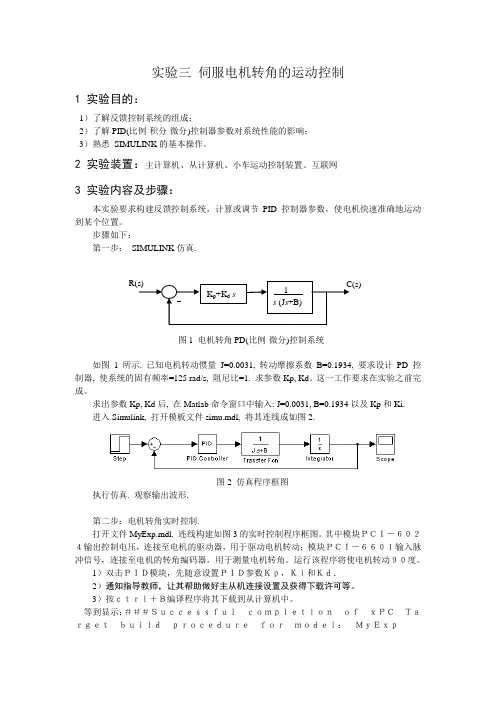
步骤如下:第一步: SIMULINK 仿真.如图1所示. 已知电机转动惯量 J=0.0031, 转动摩擦系数 B=0.1934, 要求设计PD 控制器, 使系统的固有频率=125 rad/s, 阻尼比=1. 求参数Kp, Kd 。
这一工作要求在实验之前完成。
求出参数Kp, Kd 后, 在Matlab 命令窗口中输入: J=0.0031, B=0.1934以及Kp 和Ki. 进入Simulink, 打开模板文件simu.mdl, 将其连线成如图2.图2 仿真程序框图执行仿真. 观察输出波形.第二步:电机转角实时控制.打开文件MyExp.mdl. 连线构建如图3的实时控制程序框图。
其中模块PCI-6024输出控制电压,连接至电机的驱动器,用于驱动电机转动;模块PCI-6601输入脉冲信号,连接至电机的转角编码器,用于测量电机转角。
运行该程序将使电机转动90度。
1)双击PID模块,先随意设置PID参数Kp,Ki和Kd.2)通知指导教师,让其帮助做好主从机连接设置及获得下载许可等。
3)按ctrl+B编译程序将其下载到从计算机中。
等到显示:###Successful completion of xPC Target build procedure for model: MyExp图1 电机转角PD(比例-微分)控制系统4)在命令窗输入:+tg即可启动程序。
5)输入:-tg停止程序。
或者将程序运行时间设为2秒,让其自动停止。
6)输入:plot (tg. Timelog, tg.OutputLog) 绘制电机转角波形。
两台伺服电机同步运动的控制方法在机器人控制中,两台伺服电机同步运动是非常常见的应用场景。
在实现这一目标时,需要考虑多个因素,包括控制策略选择、编码器信号处理、运动规划和同步误差补偿等。
本文将介绍10条关于两台伺服电机同步运动的控制方法,并针对每个方法进行详细描述。
1. 固定速度同步固定速度同步是最简单的同步控制策略之一。
当两台电机需要进行同步运动时,控制系统简单地设定一个固定的速度,并使两台电机以相同速度运转。
这种方法非常容易实现,但缺点是无法进行精细的控制,无法适应不同的工作负载和环境变化等因素。
此方法适用于要求同步精度不高的低要求应用场景。
2. 位置比较同步位置比较同步是一种基于编码器反馈的同步控制策略。
在运动过程中,两台电机所连接的机械系统需要一个共同的位置参考点,控制系统通过比较这两个位置信号的偏差来控制两台电机实现同步运动。
此方法的优点是同步效果较为精确,但缺点是需要编码器反馈,且无法适应突然的负载变化。
3. 时间比较同步时间比较同步是一种基于定时器的同步控制策略。
当两台电机需要进行同步运动时,控制系统使用定时器来定时,以确保两台电机在相同时间内完成运动。
此方法实现简单,无需编码器反馈,但受到定时器精确度的限制。
4. PID 控制同步PID控制同步是一种基于PID控制器的同步控制策略。
PID控制器是一种广泛应用于控制系统中的控制器,它通过比较设定值和实际值的偏差来调节输出信号,以达到减小误差和稳定控制的目的。
在使用PID控制器实现同步控制时,控制系统需要根据具体的工作负载、运动速度和运动规划等因素来调节PID参数。
此方法适用于对同步精度有较高要求的应用场景。
5. 动态滤波同步动态滤波同步是一种基于滤波器的同步控制策略。
此方法将编码器反馈信号通过滤波器处理,以提高信号的稳定性和精确度。
滤波器的参数需要根据具体的工作负载和运动规划等因素进行调节。
此方法适用于对同步精度有一定要求的应用场景。
伺服电机的控制方式和运动控制系统伺服电机是一种能够根据控制信号精确地控制旋转角度、转速和位置的电机,广泛应用于工业自动化领域。
在实际应用中,为了使伺服电机能够实现精准的控制,需要配合合适的控制方式和运动控制系统。
下面将介绍伺服电机的控制方式和运动控制系统。
一、伺服电机的控制方式1. 位置控制位置控制是指通过控制伺服电机的旋转角度或线性位置来控制工件或设备的位置。
在位置控制中,通常需要通过编码器等反馈装置实时监测伺服电机的位置,从而调整控制信号,使电机按照设定的位置参数进行运动。
2. 速度控制速度控制是指通过控制伺服电机的转速来实现控制目标。
通过调节电机的输入电压、电流或脉冲信号,可以实现对电机转速的精准控制。
速度控制广泛应用于需要稳定速度输出的场合,如汽车行驶控制、风机调速等。
3. 力矩控制力矩控制是指通过控制伺服电机的输出扭矩来实现对负载的力矩控制。
在一些需要对工件施加精确力矩的场合,如加工中心、机器人等,力矩控制是非常重要的控制方式。
二、运动控制系统1. 传感器传感器是运动控制系统中的重要组成部分,用于实时监测电机的位置、速度、力矩等参数。
常用的传感器包括编码器、霍尔传感器、压力传感器等,它们可以将实时采集到的数据反馈给控制系统,实现对电机的闭环控制。
2. 控制器控制器是指控制电机运动的核心部件,根据传感器反馈的数据计算出控制信号,并输出给伺服电机,以实现对其位置、速度或力矩的精准控制。
控制器通常可分为单轴控制器和多轴控制器,用于不同数量的电机同时运动的控制。
3. 运动控制算法运动控制算法是指控制系统中用于计算控制信号的算法,包括位置环控制、速度环控制、力矩环控制等。
运动控制算法的设计和优化对系统的性能和稳定性有重要影响,需要根据具体的应用场景选择合适的算法。
综上所述,伺服电机的控制方式和运动控制系统是伺服系统中至关重要的组成部分,直接影响到系统的性能和稳定性。
通过选择合适的控制方式和运动控制系统,可以实现对伺服电机的精准控制,满足不同应用场景的需求。
伺服控制器的运动控制算法介绍伺服控制器在工业自动化中扮演着重要的角色,它负责实现对运动系统的精密控制。
运动控制算法是伺服控制器的核心部分,决定了系统的性能和稳定性。
下面将介绍几种常见的伺服控制器运动控制算法。
1. 位置控制算法位置控制算法主要用于将执行机构控制到预定位置。
最简单的位置控制算法是基于比例控制(P控制),该算法根据当前位置与目标位置之间的差异来调整输出信号。
然而,由于存在噪声和不确定因素,简单的P控制算法往往无法满足精确的位置控制需求。
因此,常常会结合使用微分控制(D控制)和积分控制(I控制),形成PID控制算法。
PID控制算法能够通过对位置误差的比例、微分和积分进行综合调节,实现更为精确的位置控制。
2. 速度控制算法速度控制算法用于控制执行机构的运动速度,以实现平滑且精确的速度调节。
基本的速度控制算法是通过调整电机驱动器的电压或电流来控制转速。
然而,由于负载的变化和动态过程中的突发情况可能导致速度误差,因此需要应用更高级的速度控制算法来自适应地调整输出信号。
常见的速度控制算法包括速度前馈控制和模型预测控制。
速度前馈控制通过测量负载和运动参数来提前预测运动需求,并相应地调整输出信号。
而模型预测控制则是通过建立数学模型来预测运动系统的响应,并根据预测结果进行控制。
3. 力控制算法力控制算法是一种高级控制算法,用于实现执行机构对外部力的精确调节。
在某些应用中,控制的目标并不是位置或速度,而是对物体施加特定的力。
力控制算法主要基于力-位控制或力-速控制。
力-位控制算法通过感知执行机构施加到物体上的力来调节执行机构的位置。
力-速控制算法则是通过力传感器捕捉到的力信号来调节执行机构的速度。
力控制算法广泛应用于液压系统、机器人领域以及医疗设备等需要进行力量控制的应用中。
除了上述介绍的几种常见的伺服控制器运动控制算法外,还存在其他高级的控制算法,如模糊控制、自适应控制和神经网络控制等。
这些算法能够根据不同的应用需求,以更加智能和高级的方式进行运动控制。
伺服控制方案伺服控制是一种广泛应用于工业自动化领域的控制技术,通过对伺服电机的精确控制,实现对运动系统的高速、高精度定位和运动控制。
伺服控制方案是设计和实施伺服系统的完整计划,包括硬件设备的选择、参数调节、控制算法的设计等。
本文将介绍伺服控制方案的基本原理、主要组成部分以及实施步骤,以期帮助读者全面了解伺服控制技术。
一、伺服控制方案的基本原理伺服控制方案的基本原理是通过反馈控制的方式来实现对系统输出量的精确控制。
在伺服系统中,输出量一般为位置、速度或力矩等,通过传感器将输出量转化为电信号,再通过控制器对电机进行控制,实现对输出量的精确调节。
控制器会根据反馈信号与设定值进行比较,产生误差信号,并通过控制算法计算出控制指令,最终驱动伺服电机实现精确控制。
二、伺服控制方案的主要组成部分1. 伺服电机:伺服电机是伺服系统的核心部件,其具有高精度、高可靠性和高动态特性。
常见的伺服电机包括直流伺服电机和交流伺服电机,根据具体的应用需求选择合适的伺服电机。
2. 传感器:传感器主要用于实时采集系统的输出量,常见的传感器有位置传感器、速度传感器和力矩传感器等。
传感器的选型需要考虑测量范围、精度、抗干扰能力等因素。
3. 控制器:控制器是伺服系统的核心,负责接收来自传感器的反馈信号,并根据设定值进行控制计算。
控制器一般采用数字信号处理器或专用芯片来实现高速、高精度的控制算法。
4. 伺服驱动器:伺服驱动器用于控制伺服电机的运动,将控制器输出的控制指令转化为电流或电压信号,驱动伺服电机实现位置、速度或力矩的调节。
5. 供电系统:供电系统为伺服系统提供稳定的电源,供应电机、传感器和控制器等设备所需的电能。
三、伺服控制方案的实施步骤1. 系统需求分析:根据具体的应用需求,确定伺服系统的输出量、控制精度、运动速度等参数,并选择合适的伺服电机、传感器和控制器等设备。
2. 硬件选型:根据系统需求和技术指标,选择合适的伺服电机、传感器和控制器,并进行硬件连接和安装。
伺服控制器的运动控制算法介绍伺服控制器是一种用于实现精确运动控制的设备,广泛应用于工业自动化、机械加工和机器人等领域。
它通过接收传感器反馈信号,对执行器施加控制,实现定位、速度和力控制等功能。
而伺服控制器在实现运动控制的过程中,依赖于各种算法来实现精确的位置反馈和稳定的控制。
1. 位置控制算法位置控制是伺服控制器最基本的功能之一。
位置控制算法通过接收传感器反馈的位置信号,并与预设的目标位置进行比较,计算出控制信号以驱动执行器运动到目标位置。
常用的位置控制算法有PID控制算法和模型预测控制算法。
PID控制算法是一种经典的控制算法,通过比较实际位置与目标位置之间的差异,并计算出控制信号。
PID算法包含三个参数:比例、积分和微分,可以根据实际应用进行调整,以实现更好的控制效果。
模型预测控制算法则基于数学模型对系统进行预测,并根据预测结果计算出控制信号。
这种算法可以提前对系统进行优化,从而实现更精确的位置控制。
2. 速度控制算法除了位置控制,伺服控制器还可以实现精确的速度控制。
速度控制算法通过接收传感器反馈的速度信号,并与预设的目标速度进行比较,计算出控制信号以控制执行器的运动速度。
常用的速度控制算法有PID控制算法和模型预测控制算法。
与位置控制算法类似,PID控制算法在速度控制中同样适用。
通过根据实际速度与目标速度之间的差异计算控制信号,PID算法能够实时调整控制信号,从而实现精确的速度控制。
而模型预测控制算法则通过对速度进行数学建模和预测,实现更精确的速度控制效果。
3. 力控制算法除了位置和速度控制,伺服控制器还可以实现精确的力控制。
力控制算法通过接收传感器反馈的力信号,并与预设的目标力进行比较,计算出控制信号以控制执行器施加的力。
常用的力控制算法有力矩控制算法和阻抗控制算法。
力矩控制算法是一种常用的力控制算法,通过根据实际力和目标力之间的差异计算控制信号,实现精确的力控制。
力矩控制算法能够根据实际应用需求进行调整,从而实现不同力度的控制。
伺服电机与伺服控制系统原理全伺服电机是一种能够在给定的位置和速度范围内精确控制旋转或线性运动的电机。
它通常由电机本体、编码器和伺服控制器组成。
伺服控制系统则是用来控制伺服电机运动的系统,包括传感器、运动控制器和执行器等。
一、伺服电机的原理伺服电机的主要原理是通过反馈控制来实现精确位置和速度的控制。
伺服电机的控制系统通常由三个主要组件组成,分别是电机本体、编码器和伺服控制器。
1.电机本体:伺服电机通常采用带有内部电脑的电机,可以通过传感器测量其位置和速度。
它具有高速、高精度和高效率等特点。
2.编码器:编码器是一种用来测量电机位置和速度的传感器。
它通常安装在电机的轴上,并通过光电、磁电或电容等方式来检测旋转的位置和速度。
3.伺服控制器:伺服控制器是控制伺服电机运动的关键组件,它接收由编码器测量的位置和速度信息,并根据预定的控制算法计算出驱动电机的控制信号。
控制信号通过控制电流或电压来控制电机转动。
二、伺服控制系统的原理伺服控制系统的主要原理是通过对伺服电机进行闭环控制来实现运动的精确控制。
闭环控制系统由传感器、运动控制器和执行器组成。
1.传感器:传感器用于测量伺服电机的位置和速度,反馈给运动控制器。
传感器通常是编码器,通过检测电机的位置和速度来提供准确的反馈信号。
2.运动控制器:运动控制器接收传感器的反馈信号,并根据控制算法计算出控制信号。
控制信号传输给执行器驱动,以实现对伺服电机位置和速度的控制。
3.执行器:执行器是伺服电机的驱动器,它接收来自运动控制器的控制信号,并转化为适当的驱动电流或电压,以驱动电机转动。
伺服控制系统的工作原理是不断比较期望位置和实际位置之间的差距,并调整控制信号,使得它们尽可能接近。
控制器根据编码器反馈的位置和速度信息,计算出一个修正量,并将其与设定值进行对比。
然后,该修正值将被发送到执行器,以调整电机的转动。
由于伺服电机采用了闭环控制,可以有效地解决电机在负载变化、摩擦和惯性等方面的不确定性。

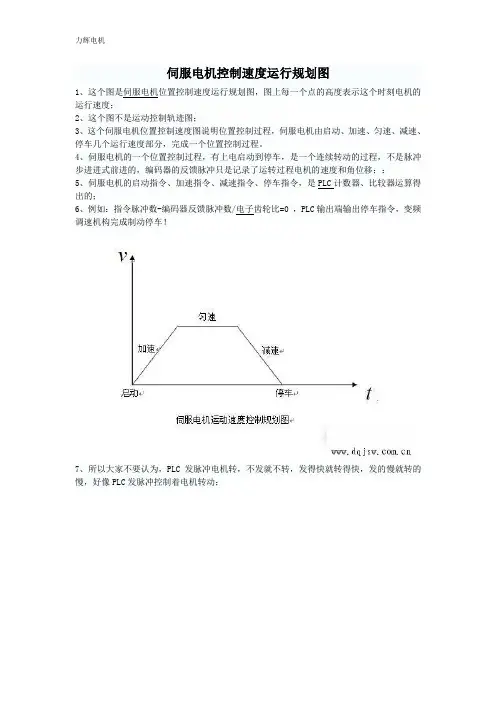
伺服电机控制速度运行规划图1、这个图是伺服电机位置控制速度运行规划图,图上每一个点的高度表示这个时刻电机的运行速度;2、这个图不是运动控制轨迹图;3、这个伺服电机位置控制速度图说明位置控制过程,伺服电机由启动、加速、匀速、减速、停车几个运行速度部分,完成一个位置控制过程。
4、伺服电机的一个位置控制过程,有上电启动到停车,是一个连续转动的过程,不是脉冲步进进式前进的,编码器的反馈脉冲只是记录了运转过程电机的速度和角位移;:5、伺服电机的启动指令、加速指令、减速指令、停车指令,是PLC计数器、比较器运算得出的;6、例如:指令脉冲数-编码器反馈脉冲数/电子齿轮比=0 ,PLC输出端输出停车指令,变频调速机构完成制动停车!7、所以大家不要认为,PLC发脉冲电机转,不发就不转,发得快就转得快,发的慢就转的慢,好像PLC发脉冲控制着电机转动;8、伺服电机的速度v单位是:指令脉冲数/秒,或者是:编码器反馈脉冲数/电子齿轮比·秒;9、速度曲线图所围的面积=指令脉冲数=编码器反馈脉冲数/电子齿轮比;10、伺服电机速度的上限可以这样计算,电机速度的上限(r/s)×周指令脉冲数=PLC计数脉冲额定频率;11、伺服电机速度的上限可以这样计算,电机速度的上限(r/s)=PLC计数脉冲额定频率×电子齿轮比/编码器解析度;12、伺服电机运行速度可以设定,必须小于上限速度,即电机速度(r/s)<PLC计数脉冲额定频率/周指令脉冲数;13、伺服电机速度不设定,也可以默认为电子齿轮比、编码器解析度、PLC计数脉冲额定频率确定的上限速度;14、减速曲线下方三角形的面积=减速位置;15、 t3 - t2 为减速时间;16、加、减速时间的设定和变频器一样;17、下面说说系统运行负载力矩的变化情况:1)伺服匀速运行期间,负载力矩=系统摩擦力矩;2)伺服加减速运行期间,负载力矩=系统摩擦力矩+惯量加速度力矩;3)伺服运行期间,加、减速期间负载大,匀速运行期间负载小;18、下面说说系统运行电机电流、力矩的变化情况:1)伺服匀速运行期间,电机运行力矩=负载力矩=系统摩擦力矩;2)伺服加减速运行期间,电机运行力矩=负载力矩=系统摩擦力矩+惯量加速度力矩;3)伺服运行期间:加、减速期间负载大,电机运行力矩大电流大;匀速运行期间负载小电机运行力矩小、电流小;19、下面说说伺服系统电机参数的选取方法:1)安全选取法:伺服匀速运行时的电流小于额定电流,力矩小于额定力矩;伺服加减速运行时的电流等于额定电流,力矩等于额定力矩;2)允许过载选取法:伺服匀速运行时的电流等于额定电流,力矩等于额定力矩;伺服加减速运行时的电流大于额定电流,力矩大于额定力矩;3)不安全严禁选取法:伺服匀速运行时的电流大于额定电流过载,力矩大于额定力矩过载;伺服加减速运行时的电流严重大于额定电流,力矩严重大于额定力矩,电机堵转过热烧毁;20、电机加减速期间系统加速度:1)电机加减速期间系统加速度=加减速曲线的斜率tgθ;2)电机加减速期间系统加速度=惯量加速力矩/惯量,与惯量加速力矩成正比,与系统惯量成反比;3)如图,蓝色曲线表示加速力矩小或者惯量大,加速度小的速度曲线;4)如图,蓝色曲线表示加速力矩过小或者惯量过大,加速度过小的速度曲线,但是最大速度还可以达到设定速度;5)如图,蓝色曲线表示加速力矩大或者惯量小,加速度大的速度曲线;21、说说伺服运动减速位置提前量的问题:1)运行速度Vt大,伺服运动减速位置提前量大,如图,Vt2大于Vt1,减速位置提前量三角形面积大小不一样;2)惯量大或者力矩小,加速度小,减速位置提前量三角形面积大,惯量小或者力矩大,加速度大,减速位置提前量三角形面积小;3)上边94楼95楼,说明伺服运动减速位置提前量与下列因数有关:①运行速度②系统惯量③加速转矩4)所以伺服运动减速位置提前量大小,不是一个确定的数,因伺服因运行参数不同而不同;5)结论和我前面辩论的结论一致!计算公式一致!21、下面说说一个配置高解析度编码器的伺服系统,电子齿轮比设置高、中、低时的速度曲线图对应的三年中运行模式:1)配置高解析度编码器的伺服系统,电子齿轮比等于1,或者小于1,电机运行速度上限低,电机只能低速运行,否则编码器反馈脉冲变形计数错误,伺服位置控制失败,如图蓝色曲线;2)配置高解析度编码器的伺服系统,爲了满足加工速度的需要,将电子齿轮比设置大一些,远大于1,电机运行速度上限大大提高,但是编码器分辨率下降不能得到充分利用,是一种浪费,如图黑色曲线;3)配置高解析度编码器的伺服系统,爲了满足加工高速度的需要,将电子齿轮比设置很大,电机运行速度上限很高,这时编码器分辨率下降为低解析度、低分辨率,浪费巨大,如图红色曲线;4)电子齿轮比小,电机低速运行,电机加减速加速度小,电机加减速电流小转矩小,如图蓝色曲线;5)电子齿轮比中,电机中速运行,电机加减速加速度中,电机加减速电流中转矩中,如图黑色曲线;6)电子齿轮比大,电机高速运行,电机加减速加速度大,电机加减速电流大转矩大,如图红色曲线;7)同一个系统,惯量不变,由于运行电子齿轮比设置高低不同,系统运行速度不同;加减速加速度不同,电机工作电流不同,运行功率不同;8)同一个系统,惯量不变,由于运行电子齿轮比设置高,系统运行速度高;加减速加速度高,电机工作电流高,运行功率大,此时并非惯量过载,如红色曲线;力辉电机22、下面说说所谓“惯量过载”的问题:1)同一个系统,由于负载惯量增大,导致加减速加速度下降很多,运行加减速时间拖得长,几乎加速完成后没有匀速运动就开始减速运动,运行全过程时间拖的很长,如图中的蓝色曲线,可以简单说成惯量过载;2)同样的曲线,也可能是因电机额定转矩小额定功率小选型小,导致如图中的蓝色曲线的情况发生,那就叫电机选型小电机过载;3)这要看这种曲线发生的背景,才能说是惯量过载,还是电机选型小的问题!。
伺服控制器的控制模式与运动方式伺服控制器是一种用于控制伺服系统的设备,它可以实现精确的位置控制和运动控制。
伺服系统通常由伺服电机、编码器、控制器和负载组成,控制器则起到了调节和控制的作用。
在伺服控制器中,控制模式和运动方式是两个重要的概念,它们决定了系统如何运行和响应外部指令。
一、控制模式1. 位置控制模式位置控制模式是伺服系统的基本控制模式之一,它通过控制伺服电机的位置来实现精确的位置控制。
在位置控制模式下,伺服系统根据接收到的位置指令和当前位置信号之间的差异,调整电机的输出,使得系统能够精确地达到指定的位置。
2. 速度控制模式速度控制模式是通过控制伺服电机的转速来实现精确的速度控制。
在速度控制模式下,伺服系统根据接收到的速度指令和当前速度信号之间的差异,调整电机的输出,使得系统能够精确地达到指定的速度。
3. 力控制模式力控制模式是指通过控制伺服电机输出的力矩大小来实现对负载施加特定力的控制。
在力控制模式下,伺服系统根据接收到的力指令和当前力信号之间的差异,调整电机的输出,使得系统能够精确地对负载施加指定的力。
控制模式的选择取决于具体应用需求。
对于需要精确位置控制的任务,位置控制模式是最常用的模式。
而对于需要稳定速度和力矩输出的任务,则可以选择速度控制或力控制模式。
二、运动方式1. 正弦运动正弦运动是指伺服系统按照正弦函数的规律进行运动。
正弦运动具有平滑性好、运动轨迹曲线连续等特点,适用于要求运动过程平稳的应用场景,如机械臂的柔性运动。
2. 脉冲运动脉冲运动是指伺服系统按照脉冲信号的规律进行运动。
脉冲运动具有快速响应、高精度等特点,适用于需要快速准确到达目标位置的应用场景,如自动化生产线上的定位和定时控制。
3. 随机运动随机运动是指伺服系统按照随机规律进行运动,可以通过随机数生成器产生随机指令,使系统运动呈现随机性。
随机运动可以用于模拟特定环境下的不确定性和复杂性,如风洞实验中的风力模拟。
4. 跟踪运动跟踪运动是指伺服系统根据外部输入的信号进行运动,在运动中跟踪外部信号的变化。
1.课程设计内容和任务要求1.1设计内容(1)正确编写PLC程序,能够实现伺服电机的跟随控制(2)用人界面监控实现伺服电机正反转的控制1.2 任务要求(1)熟悉课程设计内容,收集资料,详细阅读各设备说明书;(2)总体设计,正确选定系统方案,认真画出系统总体结构框图;(3)系统各部分的硬件设计;(4)绘制系统硬件原理图(接线图);(5)编写系统控制程序;(6)设计系统监控界面;(7)完成系统测试,并整理编写课程设计说明书2.课程设计涉及到的硬件设备2.1 台达伺服驱动器(ASD-A0421-AB)的功能介绍本次课程设计选用型号为ASD-A0421-AB的伺服驱动器(额定输出功率为:400W;输入电压及相数:220V单相;编码器分辨率:1000ppr;支持ECMA电机机种)。
与驱动器配套的电机型号为ECMA-C30604ES,其额定电压及转速:220V/3000rpm;感应形式:2500ppr;额定输出功率:200W。
2.1.1伺服驱动器的三种控制方式一般伺服有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
在控制方式上用脉冲串和方向信号实现。
速度控制和转矩控制都是用模拟量来控制的,位置控制是通过发脉冲来控制的。
具体采用什么样的控制方式要根据控制的需求,满足何种运动功能来选择。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
(1)转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为,例如10V对应5NM的话,当外部模拟量设定为5V时电机轴输出为2.5NM,如果电机轴负载低于2.5NM时电机正转,外部负载等于2.5NM时电机不转,大于2.5NM时电机反转(通常在有重力负载的情况下产生)。
可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
伺服控制的三种模式一般伺服都有三种控制方式:速度控制方式,转矩控制方式,地点控制方式,速度控制和转矩控制都是用模拟量来控制的 .地点控制是经过发脉冲来控制的 .详细采纳什么控制方式要依据客户的要求,知足何种运动功能来选择 .假如您对电机的速度、地点都没有要求,只需输出一个恒转矩,自然是用转矩模式。
假如对地点和速度有必定的精度要求,而对及时转矩不是很关怀,用转矩模式不太方便,用速度或地点模式比较好。
假如上位控制器有比较好的闭环控制功能,用速度控制成效会好一点。
假如自己要求不是很高,或许,基本没有及时性的要求,用地点控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;地点模式运算量最大,驱动器对控制信号的响应最慢。
对运动中的动向性能有比较高的要求时,需要及时对电机进行调整。
那么假如控制器自己的运算速度很慢(比方 PLC,或低端运动控制器),就用地点方式控制。
假如控制器运算速度比较快,能够用速度方式,把地点环从驱动器移到控制器上,减少驱动器的工作量,提升效率(比方大多数中高端运动控制器);假如有更好的上位控制器,还能够用转矩方式控制,把速度环也从驱动器上移开,这一般不过高端专用控制器才能这么干,并且,这时完整不需要使用伺服电机。
一般说驱动器控制的好不好,每个厂家的都说自己做的最好,可是此刻有个比较直观的比较方式,叫响应带宽。
当转矩控制或许速度控制时,经过脉冲发生器给他一个方波信号,使电机不停的正转、反转,不停的调高频次,示波器上显示的是个扫频信号,当包络线的极点抵达最高值的70."7%时,表示已经失步,此时的频次的高低,就能显示出谁的产品牛了,一般的电流环能作到 1000Hz以上,而速度环只好作到几十赫兹。
换一种比较专业的说法:运动伺服一般都是三环控制系统,从内到外挨次是电流环速度环地点环。
1、第一电流环:1 / 6电流环的输入是速度环 PID调理后的那个输出,我们称为“电流环给定”吧,而后呢就是电流环的这个给定和“电流环的反应”值进行比较后的差值在电流环内做 PID调理输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反应”不是编码器的反应而是在驱动器内部安装在每相的霍尔元件(磁场感觉变成电流电压信号)反应给电流环的。
伺服运动控制系统的结构设计及应用伺服运动控制系统是一种通过电子设备对机器进行精确控制的运动控制系统。
其主要特点是具有高精度、高可靠性和高稳定性。
伺服运动控制系统广泛应用于自动化设备、工业机械、机器人、医疗设备、航空航天等领域。
下面我将详细介绍伺服运动控制系统的结构设计及其主要应用。
1.传感器:传感器主要用于监测机器的运动状态和位置,以提供反馈信号给控制器,从而实现对机器的精确控制。
常用的传感器包括编码器、位置传感器、速度传感器等。
2.控制器:控制器是伺服运动控制系统的核心部分,负责接收传感器的反馈信号,并计算出控制信号,以驱动执行机构实现精确的运动控制。
控制器通常由微处理器或单片机构成,具有高速运算和快速相应的特点。
3.执行机构:执行机构是根据控制器的指令执行运动任务的部分,常见的执行机构包括电机、伺服电机、液压马达等。
这些执行机构能够根据控制信号进行精确的位置控制和速度调节。
1.自动化设备:伺服运动控制系统广泛应用于自动化设备中,如印刷机、包装机、激光切割机等。
通过精确的位置和速度控制,可以实现对产品的高效生产。
2.机器人:伺服运动控制系统在机器人领域有着重要的应用。
通过对机器人关节运动的控制,可以实现机器人的精确定位和灵活操作,广泛应用于工业生产、物流仓储等领域。
3.医疗设备:伺服运动控制系统在医疗设备中有着重要的应用。
例如,手术机器人和影像设备需要精确的运动控制来实现对患者的准确操作和影像重建。
4.航空航天:伺服运动控制系统在航空航天领域也有着广泛的应用。
例如,航空器和卫星的姿态控制、飞行控制等都依赖于伺服运动控制系统的高精度控制。
总之,伺服运动控制系统是一种精确控制机器运动的重要技术手段,其结构设计包括传感器、控制器和执行机构。
该系统在自动化设备、机器人、医疗设备、航空航天等领域有着广泛的应用前景。
随着科技的不断进步,伺服运动控制系统将会在更多领域发挥重要作用,并不断提高精度和稳定性,满足人们对于运动控制的需求。
伺服电机内部结构及其⼯作原理分解伺服电机内部结构伺服电机⼯作原理伺服电机原理⼀、交流伺服电动机交流伺服电动机定⼦的构造基本上与电容分相式单相异步电动机相似.其定⼦上装有两个位置互差90°的绕组,⼀个是励磁绕组Rf,它始终接在交流电压Uf上;另⼀个是控制绕组L,联接控制信号电压Uc。
所以交流伺服电动机⼜称两个伺服电动机。
交流伺服电动机的转⼦通常做成⿏笼式,但为了使伺服电动机具有较宽的调速范围、线性的机械特性,⽆“⾃转”现象和快速响应的性能,它与普通电动机相⽐,应具有转⼦电阻⼤和转动惯量⼩这两个特点。
⽬前应⽤较多的转⼦结构有两种形式:⼀种是采⽤⾼电阻率的导电材料做成的⾼电阻率导条的⿏笼转⼦,为了减⼩转⼦的转动惯量,转⼦做得细长;另⼀种是采⽤铝合⾦制成的空⼼杯形转⼦,杯壁很薄,仅0.2-0.3mm,为了减⼩磁路的磁阻,要在空⼼杯形转⼦内放置固定的内定⼦.空⼼杯形转⼦的转动惯量很⼩,反应迅速,⽽且运转平稳,因此被⼴泛采⽤。
交流伺服电动机在没有控制电压时,定⼦内只有励磁绕组产⽣的脉动磁场,转⼦静⽌不动。
当有控制电压时,定⼦内便产⽣⼀个旋转磁场,转⼦沿旋转磁场的⽅向旋转,在负载恒定的情况下,电动机的转速随控制电压的⼤⼩⽽变化,当控制电压的相位相反时,伺服电动机将反转。
交流伺服电动机的⼯作原理与分相式单相异步电动机虽然相似,但前者的转⼦电阻⽐后者⼤得多,所以伺服电动机与单机异步电动机相⽐,有三个显著特点:1、起动转矩⼤由于转⼦电阻⼤,其转矩特性曲线如图3中曲线1所⽰,与普通异步电动机的转矩特性曲线2相⽐,有明显的区别。
它可使临界转差率S0>1,这样不仅使转矩特性(机械特性)更接近于线性,⽽且具有较⼤的起动转矩。
因此,当定⼦⼀有控制电压,转⼦⽴即转动,即具有起动快、灵敏度⾼的特点。
2、运⾏范围较⼴3、⽆⾃转现象正常运转的伺服电动机,只要失去控制电压,电机⽴即停⽌运转。
当伺服电动机失去控制电压后,它处于单相运⾏状态,由于转⼦电阻⼤,定⼦中两个相反⽅向旋转的旋转磁场与转⼦作⽤所产⽣的两个转矩特性(T1-S1、T2-S 2曲线)以及合成转矩特性(T-S曲线)交流伺服电动机的输出功率⼀般是0.1-100W。
伺服运动控制系统的工作原理伺服运动控制系统是一种广泛应用于工业自动化领域的控制系统,它能够实现对机械运动的精确控制和定位。
伺服运动控制系统通常由伺服电机、编码器、控制器和传感器等组成,它的工作原理涉及到电子技术、机械技术和控制理论等多个方面。
本文将从整体结构、工作原理以及应用特点等方面介绍伺服运动控制系统的相关知识。
一、伺服运动控制系统的组成1. 伺服电机伺服电机通常采用直流电机或交流电机,它具有高精度、高性能和快速响应的特点。
伺服电机通过控制器输出的电流或电压信号来实现对电机的精确控制,从而实现对机械运动的精确定位和速度调节。
2. 编码器编码器是伺服运动控制系统中的重要传感器,用于检测电机的转动位置和速度。
根据编码器输出的信号,控制器可以实时监测电机的运动状态,并进行相应的调节和控制。
通常使用的编码器有光电编码器、磁性编码器等。
3. 控制器控制器是伺服运动控制系统的核心部件,它通常由数字信号处理器(DSP)或者嵌入式控制器组成,用于接收编码器反馈信号,并根据设定的控制算法计算出控制电流或电压信号,从而实现对伺服电机的精确控制。
4. 传感器传感器用于检测机械系统的位置、速度、力等参数,并将这些参数的信息反馈给控制器。
传感器的种类包括位移传感器、速度传感器、压力传感器等,它们可以帮助控制器获取所需的反馈信息,从而实现对机械系统的闭环控制。
以上是伺服运动控制系统的主要组成部分,这些部件通过协同工作来实现对机械运动的精确控制和定位。
二、伺服运动控制系统的工作原理伺服运动控制系统的工作原理主要包括信号采集、控制计算和执行输出三个主要环节。
1. 信号采集在伺服运动控制系统中,首先需要通过编码器和传感器等设备采集到机械系统的运动参数,如位置、速度等。
编码器会定期采集电机的转角信息,并将这些信息转换成数字信号发送至控制器。
传感器则会实时监测机械系统的运动参数,并将这些参数的信息反馈给控制器。
2. 控制计算控制器接收到编码器和传感器反馈的信息后,会进行控制计算,其主要目的是根据当前的位置、速度和期望的位置、速度等信息来计算出电机需要的控制信号。
1.课程设计内容和任务要求1.1设计内容(1)正确编写PLC程序,能够实现伺服电机的跟随控制(2)用人界面监控实现伺服电机正反转的控制1.2 任务要求(1)熟悉课程设计内容,收集资料,详细阅读各设备说明书;(2)总体设计,正确选定系统方案,认真画出系统总体结构框图;(3)系统各部分的硬件设计;(4)绘制系统硬件原理图(接线图);(5)编写系统控制程序;(6)设计系统监控界面;(7)完成系统测试,并整理编写课程设计说明书2.课程设计涉及到的硬件设备2.1 台达伺服驱动器(ASD-A0421-AB)的功能介绍本次课程设计选用型号为ASD-A0421-AB的伺服驱动器(额定输出功率为:400W;输入电压及相数:220V单相;编码器分辨率:1000ppr;支持ECMA电机机种)。
与驱动器配套的电机型号为ECMA-C30604ES,其额定电压及转速:220V/3000rpm;感应形式:2500ppr;额定输出功率:200W。
2.1.1伺服驱动器的三种控制方式一般伺服有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
在控制方式上用脉冲串和方向信号实现。
速度控制和转矩控制都是用模拟量来控制的,位置控制是通过发脉冲来控制的。
具体采用什么样的控制方式要根据控制的需求,满足何种运动功能来选择。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
(1)转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,具体表现为,例如10V对应5NM的话,当外部模拟量设定为5V时电机轴输出为2.5NM,如果电机轴负载低于2.5NM时电机正转,外部负载等于2.5NM时电机不转,大于2.5NM时电机反转(通常在有重力负载的情况下产生)。
可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
(2)速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
(3)位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
应用领域如数控机床、印刷机械等等。
本次课程设计就是通过设置P1-00为02,采用(3)位置控制模式。
2.1.2伺服驱动器的周边装置接线图对于图3电源口L1、L2为控制回路电源输入端,R、S、T为主回路电源输入端,电源接线法分为单相220V、单相110V、三相220V三种接法,设计中采用的是单相220V,安装时应该特别注意R、S、T与L1、L2电源口的接法是否正确,如果选择的接法错误,驱动器将会被烧坏。
确认伺服电机的U、V、W是否会接错,接错的话会出现不转或者乱转的情况。
伺服驱动器的CN2口为伺服电机的编码器输出口,编号U、V、W口为伺服电机动力线接口。
CN1口为伺服驱动器的控制端口,它总共50针,包括输入和输出端口还有其它的功能口,端口功能划分如图4所示。
伺服驱动器的通讯端口为CN3口,CN3口采用的是1394接头,通过不同的连接方法实现伺服器的RS232/422/485通讯,可以方便与PLC、电脑连接实现通讯监控功能。
交流220V 带漏电保护断路器电源接口伺服电机RS485Modus 通讯信号接口电机编码器接口RS232通讯PLC伺服驱动器图3 伺服驱动器的周边接线图2.1.3 伺服驱动器输入口功能接线图为了更有弹性与上位控制器互相沟通,台达伺服驱动器提供可任意规划的8组输入及5组输出。
控制器的输入与输出口功能可以分别由参数 P2-10—P2-17与参数P2-18—P2-22进行设置。
由于CN1口为50引脚,引脚数比较多如图4所示,对于引脚的记忆应该功能块记忆,分功能记忆。
脉冲输入引脚PULSE 、/PULSE 、SIGN 、/SIGN 、PULL HI ,电源引脚VDD 、COM+、COM-、VCC 、GND 。
注意NC 为空引脚,为内部电路使用,勿连接。
图4 CN1接线器(公)背面接线端2.1.4 伺服驱动器参数设定流程2.1.5 本次课程设计用到的伺服驱动器内部参数设定驱动器内部参数设定如下表P0-02 6 P2-12 114 P2-16 0 P1-00 2 P2-13 115 P2-17 0 P2-10 101 P2-14 102 P2-18 101 P2-11 104 P2-15 102 P2-19 1032.2台达变频器(VFD015M21A-Z)的功能介绍台达VFD系列的变频器种类很多,设计中选用的是M系列的变频器,其具有体积小,噪音低,具有第一、第二频率切换、睡眠和苏醒功能,支持MODBUS通讯、8段速和七段可程式运转,内置PID功能。
型号为VFD015M21A-Z,输入电压为220V 。
本次课程设计采用的是变频调速,通过调节供电频率来改变同步转速来实现对异步电机的调速,在调速过程中从高速到低速都可以保持有限的转差率,因而具有高效率、宽范围和高精度的调速性能。
变频调速是异步电机的一种非常合理和理想的调速方式。
2.2.1 变频器数字操作器(LC-2ME)操作说明信息显示操作註:若要以數字操作器設定頻率則參數P00需設為002.2.1 变频器参数设定变频器参数的设定参数设定值功能P 00 00 主频率输入由数字操作器控制P 00 04 主频率由数字操作器上的V.R.控制P 01 00 运转指令由数字操作器控制P 01 01 运转指令由外部端子控制,键盘STOP有效P 01 02 运转指令由外部端子控制,键盘STOP无效 P 38 00 M0:正转/停止,M1:反转/停止P 38 01 M0:运转/停止,M1:反转/正转2.3 台达PLC功能介绍DVP-40EHOOT2系列为高速精密定位主机;主机点数:40,输入24点输出16点;通讯端口:内置RS-232与RS-485,兼容MODBUSASCII/RTU通讯协议;高速脉冲输出:CH0(Y0、Y1)、CH1(Y2、Y3)、CH2(Y4)、CH3(Y6);本次设计用到输入x0、x1端子和输出y0、y1端子来完成本次课设要求2.3.1 台达DVP-40EH PLC的配线DVP-EH系列的PLC采用的交流220V供电,接于PLC的L、N端,但注意勿将供电电源接于PLC的24V电源口和输入口,否则会造成PLC的严重损坏。
供电电源电路原理图如图2.3.1。
图2. 3.1供电电源电路原理图PLC的S/S端非常重要,其为共享电源端,可以作为共享输入或共享输出口(与输入口是一个双向的发光二极管),设计中采用的是共享输入口,将24V接于S/S端,如图所示。
DVP系列的PLC输出模式共有两种,继电器(R)和晶体管(T),设计中要求输出频率很高,选用的晶体管输出,晶体管输出原理图如图2.3.2。
EH2系列的PLC的晶体管输出有普通的晶体管输出还有高速晶体管输出,其中CH0(Y0、Y1)、CH1(Y2、Y3)、CH2(Y4)、CH3(Y6)为高速晶体管输出其输出频率可以达到200KHZ,其余的输出点都为一般晶体管输出口,其输出频率为10KHZ,晶体管输出的PLC 与继电器PLC的最大区别就是其输出频率不同,也就决定了其应用的不同。
图2.3.2 晶体管输出原理图2.3.2 台达DVP-40EH PLC输入输出口功能分配设计中用到的PLC的输入输出口并不是很多,PLC对编码器的采集,编码器为增量型,其输出为A、B、Z三相,Z相为零脉冲检测线,主要用于电机转动圈数的计算,A相为脉冲检测的个数,B相和A相配合使用可检测出转动的方向,所以对于设计要求的异步电机的跟踪,只需用到A、B相将其接于PLC的XO、X1输入口。
伺服电机转速与方向控制,采用的是正逻辑的脉冲加方向控制,PLC输出口采用的是一组高速脉冲输出口CHO(X0、X1),X0作为脉冲输入口,X1作为方向控制(低电平为正转,高电平为反转)。
2.3.3 PLC与编码器、伺服驱动器的连接PLC相关硬件原理及设计要求的基本上了解之后,根据我们的控制要求,实现伺服电机对异步电机速度的跟踪,并对伺服电机进行正反转,调速控制等,结合伺服驱动器输入/输出和脉冲输入的电路接法最终确定PLC与编码器和伺服驱动器的接线图如图2.3.3所示。
图2.3.3 PLC与编码器、伺服驱动器的连接2.4 旋转编码器编码器是把角位移或直线位移转换成电信号的一种装置。
根据其刻度方法及信号的输出形式,可分为增量式、绝对式以及混合式三种。
增量式编码器是直接利用光电转换的原理输出三组方波脉冲A、B和Z相;A、B两组脉冲相位相差90度,Z相为没转一个脉冲,用于基准点的定位。
它的优点是原理结构简单,机械平均寿命可在几万小时以上,抗干扰能力很强,可靠性很高,适于长距离传输。
其缺点是无法输出轴转动的绝对信息。
而绝对式采用了二进制(格雷码)进行光电转换,其线数越多,精度就越高,能得出轴转动的绝对信息。
设计中试验台配的是AUTONICS的增量式编码器E40S6-100-3-2-24,E40系列分辨率为100ppr,供电电源12-24VDC,输出相数为A、B、Z三相,控制输出采用的是NPN极电极开路输出。
2.4.1 转速、方向的测量及计算方法根据增量式编码器测速的原理,在单位时间内采集到A、B相脉冲的个数,通过上位机PLC的运算得出每分钟的脉冲个数,根据编码器的分辨率,就可以计算出异步电机的转速。
例如设计中PLC在1s内采集到50000个脉冲,PLC通过指令计算出1分钟的脉冲个数为3000000个,编码器的分辨率为1000ppr,可以计算出异步电机的转速为3000r/min。
B相方法测速时电机的转向判断是非常方便的,根据A、B相的位置关系判断电机的转向。
设计中编码器如果发出的脉冲A相在前,则电机正转,反之电机反转。
2.5 人机界面触摸屏人机界面(Human–Machine Interaction,简称HMI),是人与计算机之间传递、交换信息的媒介和对话接口,是计算机系统的重要组成部分。
其最简单的应用为输入/出、显示,输入指的是由人来进行机械或设备的操作,相当于开关等,而输出指的是由机械或设备发出来的通知,如故障、警告、操作说明提示等。