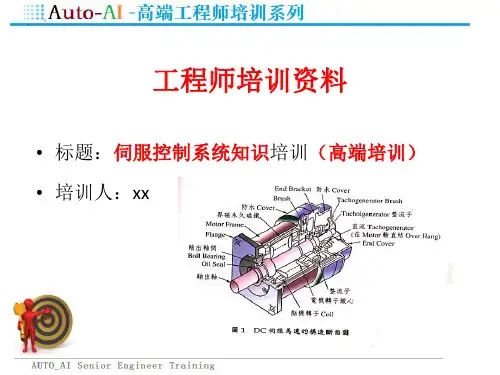
伺服基础培训资料全
- 格式:ppt
- 大小:4.24 MB
- 文档页数:30

三菱伺服培训教材第一章概要1.1运动控制器的特点1.2.1实模式概略1.2.2实模式框图1.3.1虚模式概略1.3.2虚模式框图1.4系统建立步骤1.5小结1.1运动控制器的特点1、QPLC CPU和多CPU系统复杂的伺服控制由Q MOTION CPU模块进行处理,其他的机械控制,过程控制由QPLC CPU负责2、符合多用途的产品Q172CPU1~8轴的多轴定位功能Q173CPU1~32轴的多轴定位功能3、可与伺服放大器进行高速的串行通讯通过SSCNET网络进行高速通讯,可进行伺服数据收集、参数变更、伺服测试、伺服监控、机械言程序监控。
4、可实现绝对位置系统通过带有绝对位置编码器的伺服马达可以实现绝对位置定位。
5、操作系统(OS)可变更根据不同的工艺控制要求,可以选择对应适用的OS版本•SV13用于搬运及组装。
如搬运机、注塑机、涂装机等•SV22用于自动机。
如同步控制,食品、包装等•SV43用于机床行业•SV51用于机械手6、凸轮软件(仅用于SV22)将机械机构中常用的凸轮机构以伺服马达控制,变换为虚拟模式的凸轮输出。
7、机械支持语言(仅用于SV22)将运动从原来的机械性的整合解放出来,通过软件对机械机构的运动控制器进行处理,从而执行伺服马达的控制,可以提高定位控制的功能和性能,通过电气化的方式减少机械结构上的制约,达到更合理的设计效果。
减少系统成本。
1.5小结第二章功能说明2.1运动控制器规格2.2运动控制器的系统配置2.2.1Q173CPU2.2.2Q172CPU2.2.3Q172LX/EX2.2.4Q173PX2.3小结2.3小结本章主要说明的Q运动控制器系统的硬件组成、Q172/Q173CPU之间的功能比较以及运动控制器专用模块的功能说明第三章多CPU系统3.1多CPU系统概述3.2多CPU的安装位置3.2.1多CPU输入输出编号3.3共享存储器的自动刷新3.4多CPU运动控制器专用指令3.4.1SFC程序启动命令SFCS3.4.2SFC程序启动命令SVST3.4.3值变更命令CHGA/CHGV/CHGT3.4.4软元件读取/写入DDWR/DDRD3.5小结3.1多CPU系统概述多CPU系统将多台(最多4台)QPLC CPU/Q Motion CPU安装在基板上,由各QPLC CPU/Q Motion CPU对输入输出模块,智能模块进行控制的系统。

最完整的伺服培训教程一、教学内容本节课的教学内容来自于小学数学教材的第五章《几何图形》中的第二节——《正方形和长方形》。
本节内容主要介绍了正方形和长方形的定义、性质、计算方法以及它们在实际生活中的应用。
二、教学目标1. 让学生掌握正方形和长方形的定义、性质和计算方法。
2. 培养学生运用几何图形解决实际问题的能力。
3. 培养学生合作学习、积极思考的良好学习习惯。
三、教学难点与重点重点:正方形和长方形的定义、性质和计算方法。
难点:正方形和长方形在实际生活中的应用。
四、教具与学具准备教具:黑板、粉笔、正方形和长方形的模型。
学具:练习本、彩笔。
五、教学过程1. 实践情景引入:让学生观察教室里的桌子、黑板等物品,找出正方形和长方形的例子。
2. 概念讲解:讲解正方形和长方形的定义、性质。
3. 例题讲解:用模型展示正方形和长方形的计算方法。
4. 随堂练习:让学生独立完成练习题,巩固所学知识。
5. 应用拓展:让学生分组讨论,找出正方形和长方形在实际生活中的应用。
六、板书设计板书内容:正方形:四条边相等,四个角都是直角。
长方形:对边相等,四个角都是直角。
七、作业设计1. 请用彩笔画出一个正方形和一个长方形。
2. 计算下面图形的面积:正方形:边长 5cm长方形:长 8cm,宽 4cm答案:正方形面积:25cm²长方形面积:32cm²八、课后反思及拓展延伸1. 课后反思:本节课学生对正方形和长方形的定义、性质和计算方法掌握较好,但在实际应用方面还需加强。
2. 拓展延伸:让学生观察家庭中的物品,找出更多正方形和长方形的例子,并尝试运用所学知识解决实际问题。
重点和难点解析一、教学内容细节重点关注1. 正方形的定义:正方形是四条边相等,四个角都是直角的四边形。
2. 长方形的定义:长方形是对边相等,四个角都是直角的四边形。
3. 正方形和长方形的性质:正方形和长方形都是平行四边形,对边相等,对角相等。
4. 正方形和长方形的计算方法:正方形的面积等于边长的平方,长方形的面积等于长乘以宽。