Pr1.09第二转矩滤波 ↓
3.转矩控制的基本参数调节
参数号 Pr0.01 Pr3.18 Pr3.19 Pr3.20 Pr0.11 Pr3.21
参考值 2 用户指定 用户指定 用户指定 用户指定 用户设置
备注 控制方式选择,固定为“2” 转矩指令选择 转矩指令增益,单位 (×0.1V/100%) 电机旋转逻辑取反, 反馈脉冲数 转矩模式速度限制
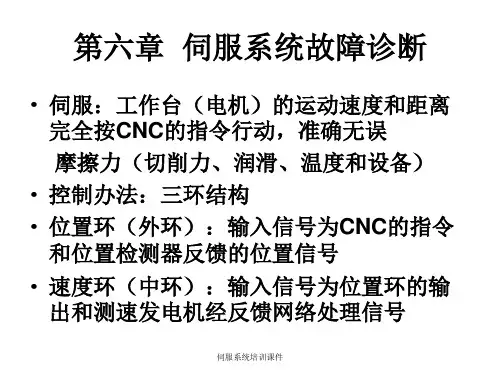
速度前馈(speed feedforward)的效果:速度(speed)观测
【实时自动调整流程图】
实行实时自动调整的情况下, 右图表示调整流量。 是 运转是否 实时自动调整这一功能,可 结束 正常? 以进行自动增益切换,自动 设定位置环路增益,速度环 路增益,速度环路积分时间 分析频率(FFT) 把握共振特性 常数、速度观测滤波器、转 矩滤波器、前馈速度,惯量 比等个调整参数,不能更改 ①把握速度环增益的范围 。 ②把握共振点,根据需要使用 按照操作手册进行调整时, 陷波滤波器 需要设定实时自动调整功能 为无效。 出现共振现象时 要求更短的整定时间时
举一个简单例子:有一台机械,是用伺服电机通过V形带传动一个恒定速 度、大惯性的负载。整个系统需要获得恒定的速度和较快的响应特性,分 析其动作过程: 当驱动器将电流送到电机时,电机立即产生扭矩;一开始,由于V形带 会有弹性,负载不会加速到象电机那样快;伺服电机会比负载提前到达设 定的速度,此时装在电机上的偏码器会削弱电流,继而削弱扭矩; 随着V 型带张力的不断增加会使电机速度变慢,此时驱动器又会去增加电流,周 而复始。 在此例中,系统是振荡的,电机扭矩是波动的,负载速度也随之波动。其 结果当然会是噪音、磨损、不稳定了。不过,这都不是由伺服电机引起的, 这种噪声和不稳定性,是来源于机械传动装置,是由于伺服系统反应速度 (高)与机械传递或者反应时间(较长)不相匹配而引起的,即伺服电机响 应快于系统调整新的扭矩所需的时间。 找到了问题根源所在,再来解决当然就容易多了,针对以上例子,您可以: (1)增加机械刚性和降低系统的惯性,减少机械传动部位的响应时间, 如把V形带更换成直接丝杆传动或用齿轮箱代替V型带。(2)降低伺服系 统的响应速度,减少伺服系统的控制带宽,如降低伺服系统的增益参数值。 (3)设置滤波器,陷波等。