由min H x , ,u,t H x , ,u ,t uU
min H
uU
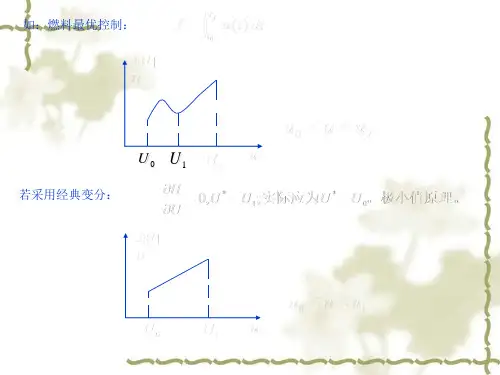
min uT BT
u( t ) SGN( BT )
得:
ui( t )sgn ( BT ) i ,i1,2, ,r
1 a 0
其中函数sgn a
0
a0
1 a 0
a为向量时用SGN表示。
总目录 返回 上一页 下一页
6.8 极小值原理
经典变分法
x Hx,u, ,t , Hx,u, ,t , Hx,u, ,t 0
x
u
状态方程
伴随方程
控制方程
应用范围:
u无约束, 且H对u连续可微 难满足
一般 ui Mi ( i 1,2 m ) 更一般控制u(t)受不等式约束:
gxt ,u(t),t 0
总目录 返回 上一页 下一页
t
u 切换时刻
总目录 返回 上一页 下一页
6.10.2 状态轨线及开关曲线
x* t 12.3
1
0 0.307
1
0.5
t 0 0.307
6.44
5
1 t 0 0.307 1 t
总目录 返回 上一页 下一页
例6.8.2 已知系统 x1t x1t ut x10 1
x2 t x1t
x2 0 0
其中 ut 1 ,若x t f 自由,求u* t 使
J x2 1 min
由正则方程组: x Ax Bu
H AT
x
(
t
)
e
AT t
(
0
)
e
AT t 0
u( t ) SGN( BT ) SGN( BT e ATt0 )
1.时间控制是Bang-Bang控制,即开关控制;