最优控制的特点实例
- 格式:pptx
- 大小:138.53 KB
- 文档页数:17
最优控制论文一、最优控制(optimal control)的一般性描述:通过这一门课程的学习,首先给最优控制(Optimal Control)下一个定义:在规定的限度下,使被控系统的性能指标达到最佳状态的控制。
先了解一下最优控制发展的历史:最优控制理论是50年代中期在空间技术的推动下开始形成和发展起来的。
美国学者R.贝尔曼1957年动态规划和前苏联学者L.S.庞特里亚金1958年提出的极大值原理,两者的创立仅相差一年左右。
对最优控制理论的形成和发展起了重要的作用。
线性系统在二次型性能指标下的最优控制问题则是R.E.卡尔曼在60年代初提出和解决的。
另外我国科学家钱学森1954年所着的《工程控制论》(EngineeringCybernetics)直接促进了最优控制理论的发展和形成。
最优控制主要研究的问题:根据已建立的被控对象的时域数学模型或频域数学模型,选择一个容许的控制律,使得被控对象按预定的要求运行,并使给定的某一性能指标达到最优值。
例如,对一个受控的动力学系统或运动过程,从一类允许的控制方案中找出一个最优的控制方案,使系统的运动在由某个初始状态转移到指定的目标状态的同时,其性能指标值为最优。
这类问题广泛存在于技术领域或社会问题中。
例如,确定一个最优控制方式使空间飞行器由一个轨道转换到另一轨道过程中燃料消耗最少。
现在,我们把这些问题转化为数学模型来分析:在运动方程和允许控制范围的约束下,对以控制函数和运动状态为变量的性能指标函数(称为泛函)求取极值(极大值或极小值)。
解决最优控制问题的主要方法有古典变分法(对泛函求极值的一种数学方法)、极大值原理和动态规划。
最优控制已被应用于综合和设计最速控制系统、最省燃料控制系统、最小能耗控制系统、线性调节器等广泛领域中。
二、最优控制解决问题的基本方法及其特点和适用范围1、变分法变分法又分为古代变分法和现代变分法,它是数学领域里处理泛函(函数的函数)极值的一种方法,可以确定容许控制为开集的最优控制函数,也是研究最优控制问题的一种重要工具。
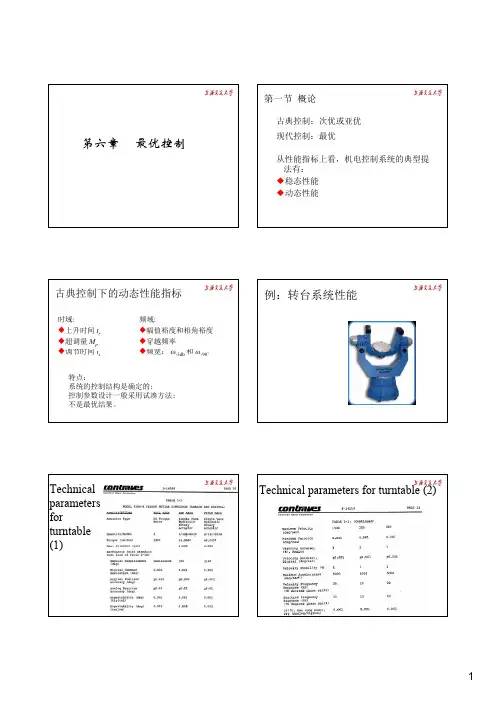
TechnicalTechnical parameters for turntable (2) parametersforturntable(1)通过实例来初步认识为转动惯量;内,电动机从静止起动,转过一定角度最小,求θt t I R D t D fd )(2∫=)(t I D 的函数,E 是函数的函数,称为中的直流他励电动机,如果电动机从初始)(t I D 又停下,求控制(是。
θ()D I t FD D D m T J I J K ⎥⎥⎦⎤⎢⎢⎣⎡+⎥⎥⎦⎤100末值状态⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡0)()(21θf f t x t x 最优控制问题提法为:在状态方程约束下,寻求最优控制,使J 为最小最优控制:在某个性能指标下的最优控制;性能指标处的增量为::求平面上两固定点连线最短的曲线c=自由的终端约束的极值问题。
ce t回顾前面最优控制问题提出的第二个例子可以看出:1、当终值时刻,ω=02、I D (t )为负斜率线性函数,,]x u t ③边界条件(以始端固定、终端自由为例):[(),]()f f f x t t x t φ∂],,,*t λu 与通常基于变分法的最优控制不同处极值的必要条件是使哈密尔顿函1线性系统的二次型性能指标最优控制u 在这里不是输入,而是一种(反馈)控制结构03,0f t t ==322212121(242)2x x x x u dt+++10⎡⎤⎢21⎡⎤⎥02S =⎥⎣⎦14Q =⎢⎣⎦121222p x p x ⎤⎡⎤⎥⎢⎥⎦⎣⎦xxx+)}t随着参考输入的不同,系统的结构(输入部份)也不同变输入变结构控制?其状态方程模型u x=2&21x x=&}u ≤1系统的初始状态为)0(1x )0(2x 末值状态为)(1=f t x 0)(2=f t x 性能指标为ft t t J f ==∫d )(f t x 要求在状态方程约束下,寻求最优控制,转移到,同时使J 取极小值。

9 最优控制用经典控制理论设计系统时,是根据给定的频域和时域指标,通过选择适当结构和参数的校正装置进行调节,本质上是一个试凑的方法,设计质量的好坏很大程度上依赖于设计人员的实践经验。
而最优控制的设计目标是要选择适当的控制的规律,使控制系统在严格的数学基础上实现系统的性能品质在某种意义下是最优的。
最优控制是现代控制理论的一个重要组成部分。
本章主要讨论最优控制问题的基本概念。
二次型最优控制问题以及最优观测器设计。
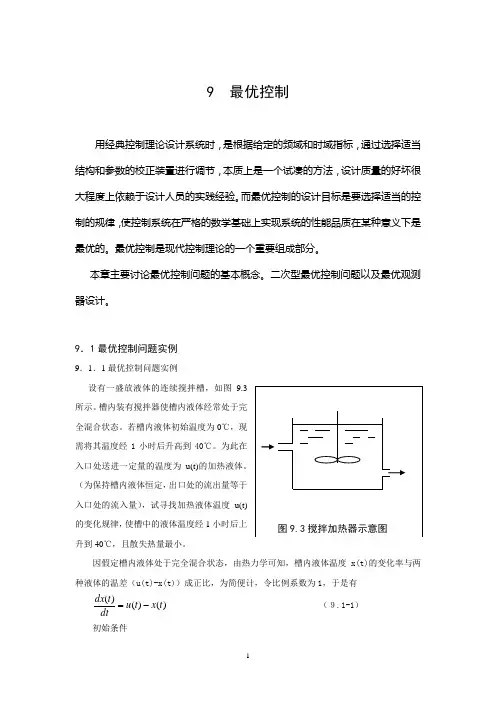
9.1最优控制问题实例9.1.1最优控制问题实例设有一盛放液体的连续搅拌槽,如图9.3所示。
槽内装有搅拌器使槽内液体经常处于完全混合状态。
若槽内液体初始温度为0℃,现需将其温度经1小时后升高到40℃。
为此在入口处送进一定量的温度为u(t)的加热液体。
(为保持槽内液体恒定,出口处的流出量等于入口处的流入量),试寻找加热液体温度u(t)的变化规律,使槽中的液体温度经1小时后上升到40℃,且散失热量最小。
因假定槽内液体处于完全混合状态,由热力学可知,槽内液体温度x(t)的变化率与两种液体的温差(u(t)-x(t))成正比,为简便计,令比例系数为1,于是有)()()(t x t u dtt dx -= (9.1-1)初始条件x(0)=0 (9.1-2) 终值条件x(1)=40 (9.1-3)在1小时内散失掉的热量可用下式表示J=⎰10[qx2(t)+ru2(t)]dt (9.1-4)其中q和r都是正的常数。
该问题的任务是,寻求加热液体温度的最优变化规律u*(t),使槽内液体由初态9.1-2转移到终态9.1-3的过程中散失热量9.1-4为最小。
9.1.2最优控制问题的一般提法根据上例可概括出,最优控制问题用数学语言来描述时应该包含以下几方面内容:1.系统状态方程.x=f[x(t),u(t),t] (9.1-5)其中,x为n维状态向量,u为r维控制向量,f(.)是n维函数向量。
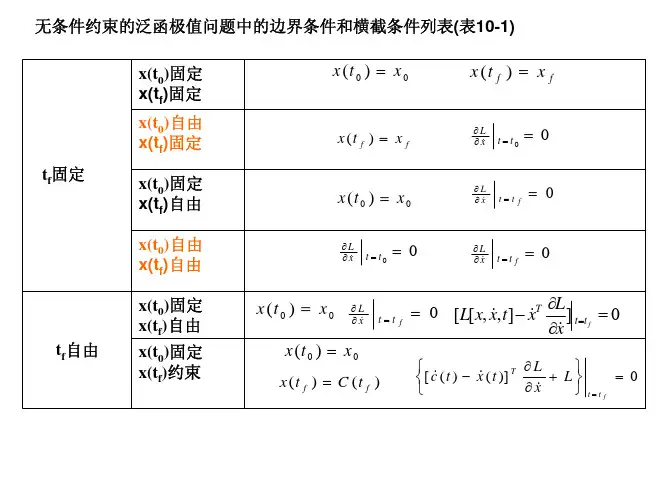
2.控制变量的约束条件大多数实际控制系统中的控制变量的取值范围是受限制的,如发动机的推力,电动机的转矩等都不能超出某一极限,即|u|≤K在数学上,表示容许控制域为控制空间中的一个集合Uu∈3.初始条件和终值条件在最优控制中,初始条件通常是已知的,即X(t0)=X,而终值条件则要复杂些,它可以是状态空间中一个确定的点,或状态空间中某一个点集(目标集)中的任何一个点。

最优控制的应用案例1、电力系统最优控制:随着电力系统的快速发展,电力系统的稳定运行需要能够实现最优控制。
最优控制技术可以有效地提高电力系统的可靠性和安全性,并且能够改善电力系统的运行效率和经济性。
此类技术可以帮助实现电力系统的自动控制,进而使电力系统能够适应不断变化的环境和复杂的负荷需求。
2、汽车优化控制:汽车电子控制系统是汽车性能和安全性能的重要保证。
采用最优控制技术,可以提高汽车的操纵性能和安全性。
具体而言,最优控制可以有效地提高汽车的加速性能,并且可以使汽车在恶劣的道路条件下安全行驶,从而改善汽车的整体操纵性能。
3、风力发电机最优控制:风力发电机的最优控制可以帮助减少由于环境噪声和突发事件引起的运行不稳定情况,从而改善风力发电机的可靠性和安全性。
此外,采用最优控制可以提高风力发电机的发电效率,从而有效地提高风力发电机的经济性。
4、投资组合最优控制:投资组合最优控制技术可以帮助投资者在风险和收益之间取得最佳平衡,并最大程度地提高投资收益率。
此类技术可以帮助投资者分析和评估投资组合的风险和收益,并有效地控制投资组合的风险,从而获得最佳投资效果。
5、能源最优控制:能源最优控制技术可以帮助企业有效地控制能源消耗,从而降低企业的能源成本。
此外,采用最优控制技术还可以帮助企业有效地分配能源,以满足不同部门的能源需求,从而提高能源的利用效率。
6、交通控制:最优控制技术可以帮助交通控制者有效地控制交通流量,从而提高交通系统的安全性和可靠性。
最优控制技术可以根据实时交通流量和交通路况调整交通灯的信号设置,从而有效地控制交通流量,减少交通拥堵的情况发生。
7、自动制造控制:最优控制技术可以帮助自动化制造系统实现高效率和高质量的制造。
此类技术可以根据制造过程的实时状态,调整机器人的运动轨迹,从而有效地改善制造过程的效率。
此外,最优控制技术还可以帮助自动化制造系统实现对制造质量的有效监控,从而保证产品质量。
第七章 最优控制(Optimal Control )最优化(Optimization ):生产过程的控制,企业的生产调度,对资金、材料、设备的分配,经济政策的制定等都与最优化有关。
最优控制:通常是针对控制系统本身而言的,目的是使一个机组、一台设备、或一个生产过程实现局部最优。
7-1概述1.最优分配问题:仓库(水泥) 运费(元/包) 工地(需要水泥)问应怎样发送这些水泥,才能使运费最省?设:从甲仓库运往A 、B 、C 工地的水泥数分别为1x 、2x 、3x ;从乙仓库运往A 、B 、C 工地的水泥数分别为4x 、5x 、6x 目标函数()x f (总运费):()65432195442x x x x x x x f +++++= 最优化的任务:确定[]Tx x x x x x x 654321=的值,使()x f 为最小。
约束条件:⎪⎪⎪⎩⎪⎪⎪⎨⎧=+=+=+≤++≤++1200600900180********241654321x x x x x x x x x x x x该问题称为具有不等式约束条件的线性最优化问题,属于静态最优化问题,变量x 与时间无关2.动态最优化问题动态最优化问题:在最优控制系统中,受控对象是一个动态系统,所有变量都是时间的函数。
目标函数:是时间函数的函数,称为泛函数(简称泛函) 例:目标泛函 ()()[]⎰=ft t dt t t u t x L J 0,,基本约束条件(受控对象的状态方程):()()()[]t t u t x f t x ,,= J----标量L----标量函数()t x ----n 维状态矢量 ()t u ----r 维控制矢量f ----n 维矢量函数最优控制问题:在满足约束条件下,寻求最优控制函数()t u ,使目标泛函J 取极值(最小或最大),即()max min =J 。
3.求解动态最优化问题的方法古典变分法、极小(大)值原理、动态规划法7-2研究最优控制的前提条件1.给出受控系统的动态描述,即状态方程()()()[]t t u t x f t x,,= 2.明确控制作用域控制集:()(){}0,≤=u x j t u U ϕ()()r m m j u x j ≤=≤;,,2,10, ϕ----()t u 满足的约束条件容许控制:()U t u ∈ 3.明确始端条件 固定始端:()0t x 给定 自由始端:()0t x 任意可变始端:()00Ω∈t x 始端集:()()[]{}0000==Ωt x j t x ρ()[]()n m m j t x j ≤==;,2,100 ρ----()0t x 必须满足的约束条件 4. 明确终端条件固定终端:f t 、()f t x 给定 自由终端:f t 给定、()f t x 任意可变终端:()f f t x Ω∈ 目标集:()()[]{}0==Ωf j t x ff t x ϕ()[]()n m m j t x f j ≤==;,2,10 ϕ----()f t x 必须满足的约束条件5. 给出目标泛函(即性能指标) 对于连续时间系统,一般表示为:()[]()()[]⎰+Φ=ft t f dt t t u t x L t x J 0,, (综合型或鲍尔扎型)()[]f t x Φ----终端指标函数,反映对终端性能的要求;()()[]⎰ft t dt t t u t x L 0,,----动态指标函数,L 为状态控制过程中对动态品质及能量或燃料消耗的要求等。