理论力学(矢量运算基本知识)
- 格式:ppt
- 大小:873.50 KB
- 文档页数:21
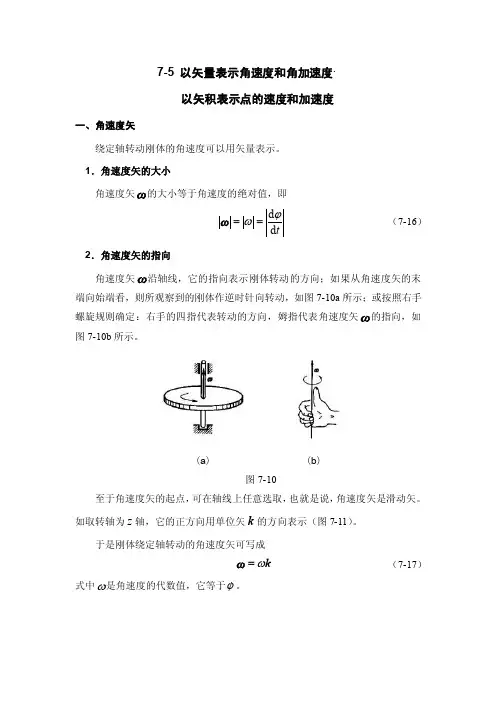
7-5 以矢量表示角速度和角加速度·以矢积表示点的速度和加速度一、角速度矢绕定轴转动刚体的角速度可以用矢量表示。
1.角速度矢的大小角速度矢ω的大小等于角速度的绝对值,即td d ϕω==ω (7-16) 2.角速度矢的指向角速度矢ω沿轴线,它的指向表示刚体转动的方向;如果从角速度矢的末端向始端看,则所观察到的刚体作逆时针向转动,如图7-10a 所示;或按照右手螺旋规则确定:右手的四指代表转动的方向,姆指代表角速度矢ω的指向,如图7-10b 所示。
(a ) (b )图7-10至于角速度矢的起点,可在轴线上任意选取,也就是说,角速度矢是滑动矢。
如取转轴为z 轴,它的正方向用单位矢k 的方向表示(图7-11)。
于是刚体绕定轴转动的角速度矢可写成k ω=ω (7-17)式中ω是角速度的代数值,它等于ϕ。
(a ) (b )图7-11二、角加速度矢同样,刚体绕定轴转动的角加速度可以用一个沿坐标轴线的滑动矢量表示:k ε=ε (7-18)式中ε是角加速度的代数值,它等于ω或ϕ 。
于是 )(d dd d k k ωωtt ==ε (7-19)即角加速度ε是角速度矢ω对时间的一阶导数。
根据上述角速度和角加速度的矢量表示法,刚体内任一点的速度可以用矢积 表示。
三、速度的矢量积表示如在轴线上任选一点O 为原点,点M 的矢径以r 表示,如图7-12所示。
图7-12那么,点M 的速度可以用角速度矢与它的矢径的矢量积来表示,即r v ⨯=ω (7-20)为了证明这一点,需证明矢积r ⨯ω确实表示点M 的大小和方向。
根据矢积的定义知,r ⨯ω仍是一个矢量,它的大小是v r r =⋅=⋅=⨯R ωωωθsin式中θ是角速度矢ω与矢径r 的夹角。
于是证明了矢积r ⨯ω的大小等于速度的大小。
矢积r ⨯ω的方向垂直于ω和r 所组成的平面(即图7-12中三角形OMO 1平面),从矢量v 的末端向始端看,则见ω按逆时针转向转过角θ与r 重合,由图容易看出,矢积r ⨯ω的方向正好与点M 的方向相同。

chap0 矢量代数0.1矢量与标量一.标量定义:只有大小,没有方向的量。
表示:数字(可带正负号)。
加法:代数和。
二.矢量定义:既有大小,又有方向的量。
表示:0A v v 矢量的模)矢量的大小A v (:1)A A = 方向的单位矢量沿A A v:0 2)有向线段 矢量的方向方向矢量的模)矢量的大小长度:(:加法:平行四边形法则或三角形法则。
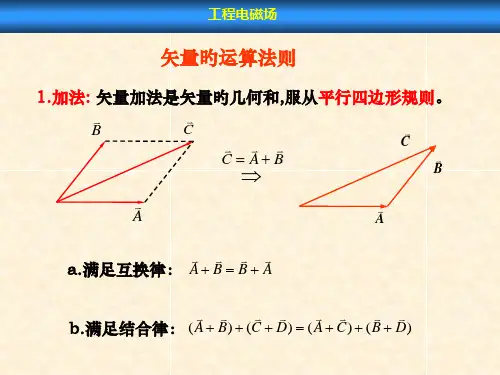
0.2矢量的合成与分解一.矢量的合成Av Av v C v B v Bv Cv Av Bv Cv Dv Ev 说明:)(B A B A vv v v −+=−BA C v v v +=BA C v v +=DC B A E v v v v v +++=A v Bv Cv Bv −Av Cv Bv二.矢量的分解把一个矢量看成两个或两个以上的矢量相加。
1.矢量的分解Ø一般一个矢量有无穷多种分解法Av Cv B v A v xA v yA v CB A v v v +→yx A A A v v v +→2.矢量的正交分解z三.矢量和(差)的正交分量表示k A j A i A A z y x v vv v ++=v vv v k B j B i B B z y x ++=k B A j B A i B A B A z z y y x x v vv v v )()()(±+±+±=±0.3矢量的乘积定义:一.矢量乘以标量Am B v v=二.矢量的标积定义:性质:1)A B B A v v v v ⋅=⋅v θψcos AB B A =⋅=vv )],([B A v v =θ2)C A B A C B A v v v v v v ⋅+⋅=+⋅)(3)B A B A v v v v ⊥⇔=⋅0 4)2A A A =⋅v v 矢量的标积的正交分量表示:zz y y x x B A B A B A B A ++=⋅vv 1=⋅=⋅=⋅=⋅=⋅=⋅k k j j i i i k k j j i v v v v v v v v v v v v三.矢量的矢积定义:==×=大小:)],([sin B A AB S BA S vv v v v θθ性质:⊥⊥满足右螺旋定则方向:,,B S A S v v v v 1)A B B A v v v v ×−=×2)C A B A C B A v v v v v v v ×+×=+×)(3)B A B A v v v v //0↔=×4)0=×A A v v矢量的标积的正交分量表示:0.4矢量函数的导数与积分一.矢量函数矢量A v与变量t 之间存在一定的关系,如果当变量t 取定某个值后,矢量A v有唯一确定的值(大小和方向)与之对应,则A v称为t 的矢量函数,即:)(t A A v v =二.矢量函数的导数定义tt A t t A t Adt A d t t ∆∆∆∆∆∆)()(lim lim 00v v vv −+==→→zv xy)(t A A v v =)('t t A A ∆+=v)()(t A t t A A v v v −+=∆∆O1)dtBd dt A d B A dt d vv v v ±=±)(2)dtAd m A dt dm A m dt d vv v +=)(B d A d d v v v v v v 性质三.矢量函数的积分定义v v v v B d v v,若)(t A A =,)(t B B =,且A dt=则B v称为A v 的积分,记为:∫=dt A B v v性质1)dt B dt A dt B A ∫∫∫±=±v v v v )(2)dt A m dt A m ∫∫=vv )( 常量)=m (3)dt A C dt A C ∫∫⋅=⋅vv v v )(常量)=C r (r 矢量函数积分的正交分量表示k dt A j dt A i dt A dt A z y x v v v v )()()(∫∫∫∫++=4)dt A C dt A C ∫∫×=×vv v v )(常量)=C (例题0-1 两矢量:k j i a v v v v−+=34,k j i b v v v v 543+−=,通过矢量运算求:求:(1)以a v 、b v为两邻边所作的平行四边形两对角线的长度;例0-2 两矢量函数:j i t a v v v2)12(+−=,j t i b v v v )32(−+−=。

所有矢量计算公式解析矢量计算公式解析。
矢量是物理学和工程学中经常出现的概念,它们可以用来描述物体的运动、力和速度等。
在矢量计算中,有一些常见的公式和运算规则,下面我们来逐个解析这些公式。
1. 矢量的加法和减法。
矢量的加法和减法是矢量计算中最基本的运算之一。
假设有两个矢量A和B,它们的加法和减法运算分别如下:A +B = (Ax + Bx, Ay + By)。
A B = (Ax Bx, Ay By)。
其中,Ax和Ay分别表示矢量A在x和y方向上的分量,Bx和By表示矢量B 在x和y方向上的分量。
通过这些公式,我们可以很容易地计算出两个矢量的和或差。
2. 矢量的数量积。
矢量的数量积又称为点积,它是矢量计算中另一个重要的运算。
假设有两个矢量A和B,它们的数量积运算如下:A·B = |A| |B| cosθ。
其中,|A|和|B|分别表示矢量A和B的模长,θ表示两个矢量之间的夹角。
通过这个公式,我们可以计算出两个矢量的数量积,从而得到它们之间的关系。
3. 矢量的叉积。
矢量的叉积又称为向量积,它是矢量计算中另一个重要的运算。
假设有两个矢量A和B,它们的叉积运算如下:A×B = |A| |B| sinθ n。
其中,|A|和|B|分别表示矢量A和B的模长,θ表示两个矢量之间的夹角,n表示一个垂直于A和B所在平面的单位矢量。
通过这个公式,我们可以计算出两个矢量的叉积,从而得到它们之间的关系。
4. 矢量的分解。
在实际问题中,我们经常需要将一个矢量分解成两个分量矢量,以便进行更方便的计算。
假设有一个矢量A,它可以被分解成在x和y方向上的两个分量矢量Ax和Ay,分解公式如下:A = Ax + Ay。
其中,Ax和Ay分别表示矢量A在x和y方向上的分量。
通过这个公式,我们可以将一个矢量分解成两个分量矢量,从而方便进行计算。
5. 矢量的单位化。
在矢量计算中,有时我们需要将一个矢量转化为单位矢量,以便进行更方便的计算。
chap0 矢量代数0.1矢量与标量一.标量定义:只有大小,没有方向的量。
表示:数字(可带正负号)。
加法:代数和。
二.矢量定义:既有大小,又有方向的量。
表示:0A v v 矢量的模)矢量的大小A v (:1)A A = 方向的单位矢量沿A A v:0 2)有向线段 矢量的方向方向矢量的模)矢量的大小长度:(:加法:平行四边形法则或三角形法则。
0.2矢量的合成与分解一.矢量的合成Av Av v C v B v Bv Cv Av Bv Cv Dv Ev 说明:)(B A B A vv v v −+=−BA C v v v +=BA C v v +=DC B A E v v v v v +++=A v Bv Cv Bv −Av Cv Bv二.矢量的分解把一个矢量看成两个或两个以上的矢量相加。
1.矢量的分解Ø一般一个矢量有无穷多种分解法Av Cv B v A v xA v yA v CB A v v v +→yx A A A v v v +→2.矢量的正交分解z三.矢量和(差)的正交分量表示k A j A i A A z y x v vv v ++=v vv v k B j B i B B z y x ++=k B A j B A i B A B A z z y y x x v vv v v )()()(±+±+±=±0.3矢量的乘积定义:一.矢量乘以标量Am B v v=二.矢量的标积定义:性质:1)A B B A v v v v ⋅=⋅v θψcos AB B A =⋅=vv )],([B A v v =θ2)C A B A C B A v v v v v v ⋅+⋅=+⋅)(3)B A B A v v v v ⊥⇔=⋅0 4)2A A A =⋅v v 矢量的标积的正交分量表示:zz y y x x B A B A B A B A ++=⋅vv 1=⋅=⋅=⋅=⋅=⋅=⋅k k j j i i i k k j j i v v v v v v v v v v v v三.矢量的矢积定义:==×=大小:)],([sin B A AB S BA S vv v v v θθ性质:⊥⊥满足右螺旋定则方向:,,B S A S v v v v 1)A B B A v v v v ×−=×2)C A B A C B A v v v v v v v ×+×=+×)(3)B A B A v v v v //0↔=×4)0=×A A v v矢量的标积的正交分量表示:0.4矢量函数的导数与积分一.矢量函数矢量A v与变量t 之间存在一定的关系,如果当变量t 取定某个值后,矢量A v有唯一确定的值(大小和方向)与之对应,则A v称为t 的矢量函数,即:)(t A A v v =二.矢量函数的导数定义tt A t t A t Adt A d t t ∆∆∆∆∆∆)()(lim lim 00v v vv −+==→→zv xy)(t A A v v =)('t t A A ∆+=v)()(t A t t A A v v v −+=∆∆O1)dtBd dt A d B A dt d vv v v ±=±)(2)dtAd m A dt dm A m dt d vv v +=)(B d A d d v v v v v v 性质三.矢量函数的积分定义v v v v B d v v,若)(t A A =,)(t B B =,且A dt=则B v称为A v 的积分,记为:∫=dt A B v v性质1)dt B dt A dt B A ∫∫∫±=±v v v v )(2)dt A m dt A m ∫∫=vv )( 常量)=m (3)dt A C dt A C ∫∫⋅=⋅vv v v )(常量)=C r (r 矢量函数积分的正交分量表示k dt A j dt A i dt A dt A z y x v v v v )()()(∫∫∫∫++=4)dt A C dt A C ∫∫×=×vv v v )(常量)=C (例题0-1 两矢量:k j i a v v v v−+=34,k j i b v v v v 543+−=,通过矢量运算求:求:(1)以a v 、b v为两邻边所作的平行四边形两对角线的长度;例0-2 两矢量函数:j i t a v v v2)12(+−=,j t i b v v v )32(−+−=。

南京大学物理学院2012-2013学年第二学期理论力学Theoretical Mechanics⏹§1.1 质点运动学⏹§1.2 质点动力学基本定律⏹§1.3 非惯性参照系⏹§1.4 质点动力学运动定理⏹§1.5 质点系动力学第一章矢量力学运动的描述方法:一、参考系与坐标系1.参照系:为研究物体的运动需要选定某物作为参考标准(参照物),在其上作不共面的三条直线为一框架与参照物固连,这框架可代表参考物——称参考系(立场)。
注:①参照物是有限大小,但定上框架后,框架可延长到无穷远,可见参照系可理解为参照物固连的整个空间;②观察者是站在参照系的观察点上;③不特别说明都以地球为参照系。
2.坐标系:参照系确定后,在参照系上选择适宜的坐标系,便于用数学方式描述质点在空间的相对位置(方法)。
3.质点及位置的描述:(1) 质点:理想模型,有一定质量的几何点(物体形状可忽略,物体作平动)(2) 位置描述:①质点相对某参照系的位置,可由位矢r 确定;②坐标描述。
二、运动方程与轨道1. 位置矢量(位矢)cos yzr r2. 运动学方程与轨道分量式(,,)0f x y z 123()()()x f t y f t z f t从中消去参数得轨迹方程t 2. 运动学方程不涉及物体运动状态变化的原因(力).xyzx(,,)P x y z O ijkryz注意:1. 运动学方程包含了质点运动的全部信息。
单值连续轨道:位置矢量矢端随时间的演化曲线位移:设质点作曲线运动在 t 时间内,位矢的变化量(即A 到B 的有向线段)称为位移。
rz yxo rBA r AABr r r A B注意:位移是矢量;位移与路径不同.A rt 时刻位于A 点,位矢Brt+ t 时刻位于B 点,位矢速度:——反映质点运动的快慢和方向的物理量速度的方向为轨道上质点所在处的切线方向。
反映速度变化的物理量记为或a ()a t1.1.2 直角坐标系基矢:速度:加速度:[例1] 设椭圆规尺沿直线导槽以匀速度因B点坐标为v小结1:1、已知运动方程,求质点任意时刻的位置、速度以及加速度iv OPCrj r ri基矢:i j位矢:径向基矢, 沿径向;横向基矢,垂直于径向并指向θ增加的方向.注意:的方向是随时间变化的,i j与直角坐标系不同的是,矢量沿质点所在位置的基矢“就地”进行正交分解.i j y djv ri jr v rv r径向速度横向速度dr 单位矢量随时间的变化率速度:r dt21()d a r r dt2r a r r径向加速度横向加速度加速度:[例2] 某质点运动方程为式中b22b c rr zva 加速度:[例3] 设质点运动,试求速度、加速度及轨道的曲率半径.1616x y 2.5n a[解2]2sin在质点的运动轨迹上,任取一点o作为坐标的原点。
【陆工总结理论力学考试重点】之(第2章)运动学1、矢量法?答:运动方程为⃗⃗()速度:⃗⃗()加速度:⃗⃗⃗()⃗()2、直角坐标法?答:运动方程表示为:将运动方程里面的参变量(时间t)消去,便可得到动点的轨迹方程。
速度:即:动点的速度在直角坐标轴上的投影等于其对应坐标对时间t的一阶导数。
则合速度:√加速度:即:加速度在直角坐标轴上的投影等于其对应坐标对时间t的二阶导数。
则全加速度:√。
3、自然法(也称弧坐标法)?答:运动方程:()速度:加速度:切向加速度:切向加速度的大小等于动点的弧坐标对时间t的二阶导数,用来表示速度大小随时间变化的快慢程度,方向沿轨迹的切线方向。
法向加速度:式中:为曲线的曲率半径,对于圆来说即为圆的半径。
法向加速度用来表示速度方向随时间变化的快慢程度,方向总是指向圆心方向。
则全加速度:√4、直角坐标法与自然法的联系?对于同一种运动,采用直角坐标法,其加速度求法为:全加速度:√。
采用自然法,其加速度求法为:全加速度:√直角坐标法与自然法的联系:对于同一种运动,采用上述两种方法求出的全加速度是一样的,即:√√5、刚体的平行移动?答:平移运动的特征:1)刚体平移时,其上各点的轨迹不一定是直线,也可能是曲线;2)当刚体平行移动时,其上各点的轨迹形状相同;在每一瞬时,各点的速度相同,加速度也相同。
6、刚体的定轴转动?答:运动方程()角速度:单位:rad/s。
角加速度:单位:速度:加速度:切向加速度:法向加速度:则全加速度:√ √7、轮系传动比?答:如图设大齿轮的角速度为,半径为;小齿轮的角速度为,半径为。
则根据大小齿轮的齿合点A和B的线速度相等,可得:即:得:即轮系的角速度比(传动比)等于半径的反比。
大学物理课件矢量的基本概念大学物理课件:矢量的基本概念一、引言在大学物理课程中,矢量是一个基本且重要的概念。
矢量在物理学中具有广泛的应用,如力学、电磁学、热力学等领域。
为了更好地理解物理现象和解决实际问题,我们需要掌握矢量的基本概念、运算规则及其应用。
二、矢量的定义矢量,又称向量,是一种既有大小又有方向的物理量。
与标量不同,标量只有大小,没有方向。
例如,温度、质量、时间等都是标量,而速度、加速度、力等都是矢量。
三、矢量的表示矢量可以用箭头表示,箭头的长度表示矢量的大小,箭头的方向表示矢量的方向。
在二维平面内,矢量可以表示为从原点出发的有向线段;在三维空间中,矢量可以表示为从原点出发的有向线段或箭头。
四、矢量的运算规则1. 矢量的加法两个矢量的加法遵循平行四边形法则。
即将两个矢量的起点放在同一点,以这两个矢量为邻边作平行四边形,第三个顶点所对应的矢量即为这两个矢量的和。
2. 矢量的减法矢量的减法可以看作是矢量的加法,即 a b = a + (-b)。
其中,-b 表示与 b 大小相等、方向相反的矢量。
3. 矢量的数乘矢量的数乘是指将一个矢量与一个实数相乘。
数乘的结果是一个新的矢量,其大小为原矢量的大小与实数的乘积,方向与原矢量相同(实数为正)或相反(实数为负)。
4. 矢量的点乘矢量的点乘,又称数量积、内积,是指两个矢量的乘积。
点乘的结果是一个标量,其大小等于两个矢量大小的乘积与它们夹角余弦值的乘积。
5. 矢量的叉乘矢量的叉乘,又称向量积、外积,是指两个矢量的乘积。
叉乘的结果是一个新的矢量,其大小等于两个矢量大小的乘积与它们夹角正弦值的乘积,方向垂直于原矢量所在的平面,遵循右手定则。
五、矢量的应用1. 力的合成与分解在力学中,力是一种矢量。
多个力的合成与分解遵循矢量的加法与减法规则。
力的合成可以帮助我们求出多个力的合力,力的分解可以将一个力分解为多个分力。
2. 速度与加速度在运动学中,速度和加速度都是矢量。