南航 自控
- 格式:docx
- 大小:14.07 KB
- 文档页数:2

820自动控制原理考试大纲920自动控制原理(专业学位)考试大纲《自动控制原理》考试内容包括: 经典控制理论和现代控制理论。
第一章-自动控制的一般概念:控制系统的一般概念、名词术语、发展史;控制系统的分类;控制系统的组成;典型外作用;对控制系统的基本要求。
第二章-控制系统的数学模型:控制系统动态微分方程的列写;用拉普拉斯变换求解线性微分方程的零初态响应与零输入响应;运动模态的概念;传递函数的定义和性质;典型元部件传递函数的求法;控制系统结构图的绘制;梅逊公式在结构图和信号流图中的应用。
第三章-线性系统的时域分析法:系统稳定性的定义与判断法则;劳斯稳定判据;控制系统时域动态性能指标的定义与计算;一阶系统、二阶系统的阶跃响应,典型欠阻尼二阶系统动态性能指标的计算;输入引起的误差的定义,静态误差系数、系统型别、稳态误差的计算;计算典型输入作用下,不同类型系统的稳态误差;扰动引起的误差的定义与计算方法;减小稳态误差的措施。
第四章-线性系统的根轨法:根轨迹的基本概念;根轨迹的模值条件与相角条件;根轨迹绘制的基本法则;广义根轨迹;主导极点与偶极子的概念及其应用。
第五章-线性系统的频域分析法:频率特性的概念及其图示法;频率特性的计算;开环频率特性的绘制;开环系统幅相曲线绘制;开环对数曲线绘制;由最小相角系统的对数幅频渐近曲线求传递函数;奈奎斯特稳定判据;对数稳定判据;稳定裕度;串联超前校正网络的设计;串联迟后校正网络的设计。
第六章-线性离散系统的分析:离散系统的基本概念;信号的采样与保持;差分方程的概念;差分方程的求取与求解;香农采样定理;Z变换定理;离散系统的数学模型;脉冲传递函数的概念与求法;离散系统输出Z变换的求法;离散系统的稳定性与稳态误差;第七章-非线性控制系统分析知识点:非线性控制系统概述;常见非线性特性及其对系统运动的影响;负倒描述函数曲线的绘制;用描述函数法判断非线性系统稳定性;自激振荡的判断、自振参数的确定。
②南航《820⾃动控制原理》、《920⾃动控制原理(专业学位)》考试⼤纲820⾃动控制原理考试⼤纲920⾃动控制原理(专业学位)考试⼤纲《⾃动控制原理》考试内容包括: 经典控制理论和现代控制理论。
第⼀章-⾃动控制的⼀般概念:控制系统的⼀般概念、名词术语、发展史;控制系统的分类;控制系统的组成;典型外作⽤;对控制系统的基本要求。
第⼆章-控制系统的数学模型:控制系统动态微分⽅程的列写;⽤拉普拉斯变换求解线性微分⽅程的零初态响应与零输⼊响应;运动模态的概念;传递函数的定义和性质;典型元部件传递函数的求法;控制系统结构图的绘制;梅逊公式在结构图和信号流图中的应⽤。
第三章-线性系统的时域分析法:系统稳定性的定义与判断法则;劳斯稳定判据;控制系统时域动态性能指标的定义与计算;⼀阶系统、⼆阶系统的阶跃响应,典型⽋阻尼⼆阶系统动态性能指标的计算;输⼊引起的误差的定义,静态误差系数、系统型别、稳态误差的计算;计算典型输⼊作⽤下,不同类型系统的稳态误差;扰动引起的误差的定义与计算⽅法;减⼩稳态误差的措施。
第四章-线性系统的根轨法:根轨迹的基本概念;根轨迹的模值条件与相⾓条件;根轨迹绘制的基本法则;⼴义根轨迹;主导极点与偶极⼦的概念及其应⽤。
第五章-线性系统的频域分析法:频率特性的概念及其图⽰法;频率特性的计算;开环频率特性的绘制;开环系统幅相曲线绘制;开环对数曲线绘制;由最⼩相⾓系统的对数幅频渐近曲线求传递函数;奈奎斯特稳定判据;对数稳定判据;稳定裕度;串联超前校正⽹络的设计;串联迟后校正⽹络的设计。
第六章-线性离散系统的分析:离散系统的基本概念;信号的采样与保持;差分⽅程的概念;差分⽅程的求取与求解;⾹农采样定理;Z变换定理;离散系统的数学模型;脉冲传递函数的概念与求法;离散系统输出Z变换的求法;离散系统的稳定性与稳态误差;第七章-⾮线性控制系统分析知识点:⾮线性控制系统概述;常见⾮线性特性及其对系统运动的影响;负倒描述函数曲线的绘制;⽤描述函数法判断⾮线性系统稳定性;⾃激振荡的判断、⾃振参数的确定。
![[考研辅导]南航《自动控制原理》考研模拟试题与答案](https://uimg.taocdn.com/d523932727284b73f2425060.webp)
南航820自动控制原理模拟题一(15分)一、某系统结构如图1所示:求系统闭环传递函数()()C SR S。
图1(15分)二、复合控制系统的方框图如图2所示,前馈环节的传递函数()221ras bsF sT s+=+,当输入()r t为单位加速度信号时,为使系统的静态误差为零,试确定前馈环节的参数a和b。
1K()211Ks T s+()E s()R s()cF s-()C s图2(15分)三、单位反馈系统如图3,其中()()()2212+++=ssasssG,0>a为待定参数。
为简便起见,图中用R表示r(t)的Laplace变换R(s)。
其余的符号和均采用这种简便记法。
图3单位反馈系统(ⅰ)设()0>=K s G c ,已知系统四条根轨迹只有一个分离点(或会合点)-1,确定参数a 并画出根轨迹图;(ⅱ)确定根轨迹和虚轴的交点并由此确定使闭环系统稳定的K 值。
(ⅲ)确定系统输出无衰减振荡分量时的闭环传递函数。
(15分)四.系统结构图如图4.1所示,其奈魁斯特曲线如图4.2所示。
试用奈氏判据判别其稳定性。
(15分)五、系统结构图5如下,要求相稳定裕度o()45c γω≥,截止频率50rad/s c ω≥图5(15分)六、已知离散系统结构图如下图6所示,试求系统闭环脉冲传递函数表达式。
图6)12.0(102+s s Y(s) 图4.1X(s)s 2200w = 0+ ImRew = ∞ 0-1 图4.2(20分)七、如下图7所示系统中,若选取x1,x2,x3作为状态变量,试列写状态空间表达式,并写成矩阵形式。
图7(20分)八、已知系统结构图8如右,试求系统产生自振时的振幅和频率(1M=),理想继电特性描述函数为4 ()M N XXπ=图8 (20分)九、某被控对象动态方程如下:=x + u ,y=x(1)求传递函数;(2)判断系统可控可测性;(3)设计状态观测器,将观测极点配置在-4 -4 -4。
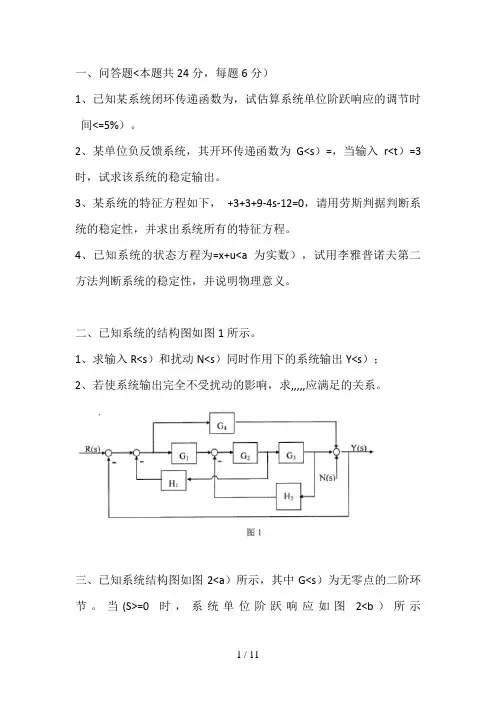
一、问答题<本题共24分,每题6分)1、已知某系统闭环传递函数为,试估算系统单位阶跃响应的调节时间<=5%)。
2、某单位负反馈系统,其开环传递函数为G<s)=,当输入r<t)=3时,试求该系统的稳定输出。
3、某系统的特征方程如下,+3+3+9-4s-12=0,请用劳斯判据判断系统的稳定性,并求出系统所有的特征方程。
4、已知系统的状态方程为=x+u<a为实数),试用李雅普诺夫第二方法判断系统的稳定性,并说明物理意义。
二、已知系统的结构图如图1所示。
1、求输入R<s)和扰动N<s)同时作用下的系统输出Y<s);2、若使系统输出完全不受扰动的影响,求,,,,,应满足的关系。
三、已知系统结构图如图2<a)所示,其中G<s)为无零点的二阶环节。
当(S>=0时,系统单位阶跃响应如图2<b)所示1.求G<s)的表达式。
2.若(S>=,在输入r(t>=时,稳态误差为零,试确定a、b。
<15分)四、某正反馈系统的结构图如图3所示,试求:1.绘制参数a从0 →∞变化的根轨迹。
2.当系统稳定情况下,求阻尼比最小时的闭环传递函数。
<15分)五、已知某最小相位系统的结构图如图4<a)所示。
其中,>0,前向通路G<s)的对数幅频特性曲线如图4<b)所示。
1.求G<s)的表达式。
2.用奈氏稳定判据分析使闭环系统稳定的的取值范围。
3.若=0.2时,求系统相角裕度。
六、系统结构图如图5所示,已知K=10,T=0.1时,截止频率=5. 若要求不变,如何改变K和T才能使系统相角裕度提高?<13分)七、某离散系统的结构图如图6所示,1.判断该系统的闭环稳定性;2.若r(t>=1(t>, 求c(2>、c(> 的数值。
<15分)提示:z[ ]=八、某非线性系统如图7所示,已知非线性环节描述函数为N(A>= ,1. 分析参数K对系统自由运动的影响;2. 若能产生自激振荡,试求使系统输出c<t)处振幅为1时的自激振荡频率和参数K的值。
目录1.1 设计原则:ﻩ错误!未定义书签。
1.2结构化布线系统与应用系统的关系....................... 错误!未定义书签。
1。
2.1结构化布线系统与应用系统的独立性ﻩ错误!未定义书签。
1.2。
2结构化布线系统与应用系统的不可分性 .............. 错误!未定义书签。
1。
2.2.1 采用综合布线系统的原因ﻩ错误!未定义书签。
1.2。
2.2 综合布线系统与应用系统的关系 ................ 错误!未定义书签。
1.2.2。
3传统布线存在的问题:ﻩ错误!未定义书签。
1。
2.2.3传统布线与结构化布线的比较 .................. 错误!未定义书签。
南航智能社区综合布线系统设计......................................... 错误!未定义书签。
布线系统用户需求分析......................................................... 错误!未定义书签。
用户需求 ............................................................................. 错误!未定义书签。
用户需求可行性分析:ﻩ错误!未定义书签。
系统纳入结构化综合布线系统的条件: ......................... 错误!未定义书签。
南航智能社区综合布线系统解决方案ﻩ错误!未定义书签。
工作区子系统ﻩ12水平区的设计ﻩ错误!未定义书签。
干线区的设计 ..................................................................... 错误!未定义书签。
分配线间的设计ﻩ错误!未定义书签。
管线设计建议ﻩ错误!未定义书签。
IBDN管线方案ﻩ错误!未定义书签。
水平线子系统的布线方案 ................................................. 错误!未定义书签。
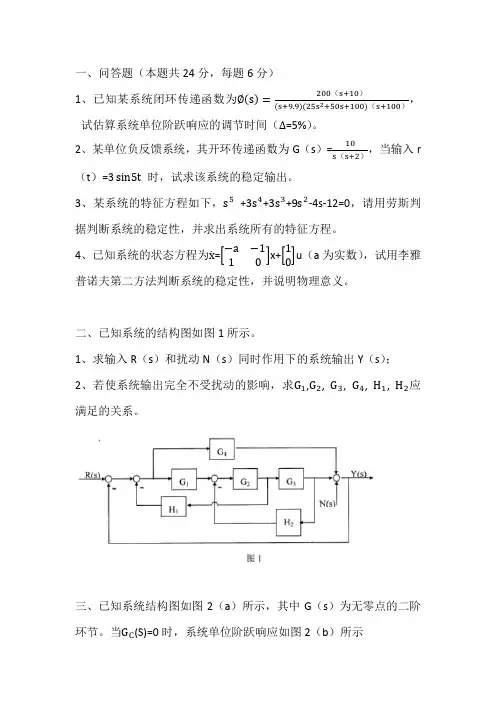
一、问答题(本题共24分,每题6分)1、已知某系统闭环传递函数为∅(s)=200(s+10)(s+9.9)(25s2+50s+100)(s+100),试估算系统单位阶跃响应的调节时间(∆=5%)。
2、某单位负反馈系统,其开环传递函数为G(s)=10s(s+2),当输入r (t)=3 sin5t时,试求该系统的稳定输出。
3、某系统的特征方程如下,s5+3s4+3s3+9s2-4s-12=0,请用劳斯判据判断系统的稳定性,并求出系统所有的特征方程。
4、已知系统的状态方程为ẋ=[−a−110]x+[1]u(a为实数),试用李雅普诺夫第二方法判断系统的稳定性,并说明物理意义。
二、已知系统的结构图如图1所示。
1、求输入R(s)和扰动N(s)同时作用下的系统输出Y(s);2、若使系统输出完全不受扰动的影响,求G1,G2, G3, G4, H1, H2应满足的关系。
三、已知系统结构图如图2(a)所示,其中G(s)为无零点的二阶环节。
当G C(S)=0时,系统单位阶跃响应如图2(b)所示1.求G(s)的表达式。
2.若G C(S)=as2+bs1+S ,在输入r(t)=12t2时,稳态误差为零,试确定a、b。
(15分)四、某正反馈系统的结构图如图3所示,试求:1.绘制参数a从0 →∞变化的根轨迹。
2.当系统稳定情况下,求阻尼比最小时的闭环传递函数。
(15分)五、已知某最小相位系统的结构图如图4(a)所示。
其中,α> 0,前向通路G(s)的对数幅频特性曲线如图4(b)所示。
1.求G(s)的表达式。
2.用奈氏稳定判据分析使闭环系统稳定的α的取值范围。
3.若α=0.2时,求系统相角裕度。
六、系统结构图如图5所示,已知K=10,T=0.1时,截止频率ωc= 5. 若要求ωc不变,如何改变K和T才能使系统相角裕度提高450?(13分)七、某离散系统的结构图如图6所示,1.判断该系统的闭环稳定性;2.若r(t)=1(t), 求c(2)、c(∞) 的数值。
2017版南京航空航天大学《820自动控制原理》全套考研资料我们是布丁考研网南航考研团队,是在读学长。
我们亲身经历过南航考研,录取后把自己当年考研时用过的资料重新整理,从本校的研招办拿到了最新的真题,同时新添加很多高参考价值的内部复习资料,保证资料的真实性,希望能帮助大家成功考入南航。
此外,我们还提供学长一对一个性化辅导服务,适合二战、在职、基础或本科不好的同学,可在短时间内快速把握重点和考点。
有任何考南航相关的疑问,也可以咨询我们,学长会提供免费的解答。
更多信息,请关注布丁考研网。
以下为本科目的资料清单(有实物图及预览,货真价实):南京航空航天大学《820自动控制原理》全套考研资一、南京航空航天大学《820自动控制原理》历年考研真题及答案解析2016年南京航空航天大学《820自动控制原理》考研真题(11月份统一更新)2015年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2014年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2013年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2012年南京航空航天大学《820自动控制原理》考研真题2011年南京航空航天大学《820自动控制原理》考研真题2010年南京航空航天大学《820自动控制原理》考研真题2009年南京航空航天大学《820自动控制原理》考研真题2008年南京航空航天大学《820自动控制原理》考研真题2007年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2006年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2005年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2004年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2003年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2002年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2001年南京航空航天大学《820自动控制原理》考研真题(含答案解析)2000年南京航空航天大学《820自动控制原理》考研真题(含答案解析)1999年南京航空航天大学《820自动控制原理》考研真题(含答案解析)二、南京航空航天大学《820自动控制原理》考研复习笔记内部笔记1、自动控制原理本科笔记最新本科(手写)课堂笔记2、自动控制原理优秀研究生笔记3、自动控制原理课后习题答案4、《自动控制原理》考试内容三、赠送南京航空航天大学《820自动控制原理》授课PPT(电子版,邮箱发送)以下为截图及预览:2015年考研真题2014年考研真题考研笔记。
财务与会计·理财版·2010 0920乔跃峰 徐 晶 池国华南方航空为中国内部控制百强企业,位居第12位(陈汉文等,2010),在央企中仅次于招商银行;2009年11月18日,《中国审计报》报道,2000~2008年,南方航空完成管理审计项目116项,提出整改建议476条,实际整改率达到96%,促进增收节支2 626万元,这是因为南方航空早在2004年就在审计部下增设管理审计科,要求内部审计人员站在经营层和管理者的高度识别风险、提出建议;2006年9月15日,国资委网站上《南方航空将控制成本贯穿于各项工作中效果显著》一文中指出,油价高涨的今天,“控制成本”的主线始终贯穿在南方航空的各项工作之中。
南方航空的内部控制实施状况真的如媒体所说的那样吗?本文拟详细介绍其内控实施情况,以期对其他企业能有借鉴意义。
一、南方航空内控的发展南方航空是中国南方航空集团公司下属航空运输主业公司,总部设在广州,现有13家分公司、5家控股子公司、18个国内营业部和52个国外办事处,总资产947亿元人民币,在香港、纽约和上海三地同时上市。
其也是中国运输飞机最多、航线网络最发达、年旅客运输量最大的航空公司,目前已形成以广州、北京为中心枢纽,密集覆盖国内,全面辐射亚洲的航线网络。
2002年,美国《萨班斯-奥克斯利法案》的颁布掀起了全球的内部控制热潮。
然而阅读南方航空2003年年报发现,其作为在纽约上市的公司却并没有采取任何完善内部控制的举动,仅提及监事会认为公司建立了健全完善的内部控制制度。
2004和2005财年依旧如此。
由此可见南方航空2004年委托理财巨亏和2005年管理层违法及贪污受贿事件的出现不足为怪。
2006年6月5日,上交所发布《上海证券交易所上市公司内部控制指引》,要求在该所上市的公司建立健全和有效实施内部控制制度,提高自身的风险管理水平。
南方航空即刻回应该指引,公司管理层指定了具体部门负责内控和风险管理工作,明确权责,建立了系统性的风险管理体系。
南航820自动控制原理南航820是一种具有高性能和可靠性的自动控制系统,广泛应用于航空航天、船舶、汽车和工业机械等领域。
该系统采用先进的控制技术,能够实现对目标物体的自动跟踪、定位、控制和调节,提高了设备的效率和精度,减少了人工操作的繁琐和误差,具有广泛的应用前景和市场潜力。
南航820自动控制原理涉及到控制系统的结构、原理、设计方法和应用技术等内容,是自动化技术研究的重要领域之一。
本文将以南航820为例,介绍自动控制原理的基本概念和技术特点,探讨其在不同领域的应用和发展趋势,为读者深入了解自动控制技术提供参考。
一、南航820自动控制系统的结构南航820自动控制系统由传感器、执行器、控制器和通信网络等组成,其中传感器用于采集目标物体的实时信息,执行器用于执行控制操作,控制器用于分析数据和生成控制信号,通信网络用于传输信息和控制指令。
这些部件通过一定的连接方式和工作流程协同工作,实现对目标物体的实时监测和控制,达到预定的目标或任务。
(一)传感器传感器是自动控制系统的重要组成部分,用于检测和采集目标物体的参数信息,如位置、速度、温度、压力等。
根据传感器的工作原理和测量方式不同,可以分为接触式传感器和非接触式传感器两种。
接触式传感器直接接触目标物体进行测量,精度高但易受干扰;非接触式传感器通过无线方式或光学方式进行测量,适用于复杂环境和远程监测。
在南航820自动控制系统中,常用的传感器有位置传感器、速度传感器、压力传感器和温度传感器等,它们通过与执行器和控制器的连接,实现对目标物体的实时监测和反馈,为控制决策提供依据和支持。
(二)执行器执行器是自动控制系统的另一个关键组成部分,用于执行控制信号和完成控制任务。
执行器根据控制信号的大小和方向,转化为机械运动或电气动作,实现对目标物体的控制和调节。
根据执行器的类型和工作方式不同,可以分为机械执行器、液压执行器和电磁执行器等。
在南航820自动控制系统中,常用的执行器有电动执行器、液压执行器和气动执行器等,它们通过与控制器和传感器的协调配合,实现对目标物体的精确控制和运动调节,提高了设备的操作精度和生产效率。
南航820自动控制原理英文回答:The automatic control principle of China Southern Airlines Flight 820 is based on a combination of various systems and components that work together to ensure the safe and efficient operation of the aircraft. The main components involved in the automatic control system are the flight control computers, sensors, actuators, and the autopilot.The flight control computers are responsible for processing and analyzing the data received from the sensors and determining the appropriate control inputs. These computers use algorithms and control laws to calculate the desired aircraft attitude, speed, and trajectory. They also take into account factors such as wind conditions, aircraft weight, and engine performance.The sensors play a crucial role in providing thenecessary information to the flight control computers. These sensors include the air data sensors, which measure parameters such as airspeed, altitude, and angle of attack, and the inertial reference system, which providesinformation about the aircraft's position, attitude, and velocity. Other sensors, such as the engine sensors and the flight control surface position sensors, also contribute to the overall control of the aircraft.Once the flight control computers have determined the desired control inputs, the actuators come into play. These actuators, which include hydraulic and electric systems,are responsible for physically moving the flight control surfaces, such as the ailerons, elevators, and rudder, to achieve the desired aircraft response. The autopilot, which is a part of the automatic control system, can also engage the actuators to maintain the desired flight parameters without pilot intervention.To illustrate the automatic control principle in action, let's consider a scenario where the aircraft encounters turbulence during the flight. The sensors detect changes inairspeed, altitude, and attitude, and relay this information to the flight control computers. The computers analyze the data and determine the appropriate control inputs to counteract the turbulence. The actuators then move the flight control surfaces accordingly to stabilize the aircraft and maintain the desired flight parameters. The autopilot can also be engaged to assist in maintaining a smooth and stable flight.中文回答:南航820的自动控制原理基于各种系统和组件的组合,它们共同工作以确保飞机的安全和高效运行。
南航自动化820经验贴本人是23届考研,成功上岸南京航空航天大学控制学硕。
政治66、英语58、数学128、专业课117,初试排名第11首先我要分享的是数学的备考经验,因为数学一学的内容多以及考试难度比较大,我觉得早一点开始准备比较好而且基础一定要学的扎实,因为考试的时候真正难的题占的分真的不多基础真的很重要。
基础阶段高数部分我看的是张宇老师的基础30讲我觉得张宇老师的视频讲的很好而且还有配套的练习题可以去检验自己的学习情况。
我在看完每一章我都会去在草稿纸上自己和自己讲这一张讲了什么知识点以及关于这些知识点的典型题目,最好在看到练习题就可以马上的知道所要考的知识点是什么了,学完一章我就会去完成相应章节的练习题然后认真去订正错的题。
在学习中值定理和级数时因为是在基础阶段要掌握到一定的深度是非常困难的,在看完张宇老师的视频后我当时就是要求自己要对这些定理以及一些公式非常熟悉并且通过同济的那本高数教材看看这些定理的证明过程,证明的思路对我理解他们和做题是有十分巨大的帮助的。
我每天都会去做武忠祥老师b站更新的每日一题然后看讲解视频。
基础阶段我推荐的习题集是660,880(基础部分)。
660的一些概念题出的非常的好挖的很深,对概念理解不深刻的可以通过做660来提升。
880我觉得是众多考研数学习题书里非常非常好的书,不管是基础还是强化阶段都可以去做,在基础阶段遇到一些证明题可以先试试去做做如果真做不了就先放着不要浪费过多的时间,我基本每天会花5个小时时间去学习数学。
线代部分我跟的也是张宇的基础30讲,线代最重要的就是搭建一个知识框架熟悉每一个知识点跟着宇哥的视频然后再做题足够了。
概率论我看的是余炳森老师的黄皮书,余炳森老师讲的非常好逻辑十分清晰。
黄皮书里也有一些课后习题学完跟着做就没问题了。
强化阶段我推荐跟着张宇老师的强化36讲,跟着张宇老师的视频一章一章过完强化,36讲的课后题质量非常的高要认真完成每一章节。
1、目的为加强公司内(以下简称厂内)特种车辆的安全管理,提高厂内特种车辆的安全技术状况,保障作业安全,特制定本管理办法。
2、范围本规定所称厂内特种车辆,是指限于企业厂区范围内作业的车辆(包括在厂区内使用的小四轮、升降机、多用机和电瓶车等)。
3、职责3.1 安全质量环保部是本规定的归口管理部门,负责公司厂内特种车辆使用安全的管理和监督。
3。
2 物资装备部负责公司厂内特种车辆使用技术安全的管理和监督。
3。
3劳动工资部负责对特种车辆作业人员的取证、培训和能力评价管理。
3。
4 各单位依据本规定,具体落实本单位特种车辆安全管理工作。
3.5安全环保公司现场HSE监理负责监督落实本规定的执行情况.4、文件内容4。
1 安全技术要求4。
1。
1 车辆应车容整洁、车身周正.车辆的装备、安全防护装置及附件应齐全有效。
4.1。
2 车辆的整车技术状况、污染物排放、噪声应符合国家有关标准及规定.4.1。
3 全车各部位在发动机运转及停车时应无漏油、漏水、漏电、漏气现象。
4。
1.4 车辆的液压系统应管路畅通,密封良好;操作杆无变形,无卡阻;分配器元件配合良好,安全阀动作灵敏可靠;工作部件在额定速度范围内不应有爬行、停滞和明显冲动现象.4.1。
5 车辆发动机应安装牢固可靠,动力性好,运转平稳,无异响,起动和停机性能良好。
4。
1。
6 发动机起动系、点火系、燃料系、润滑系、冷却系应机件齐全,性能良好,安装牢固,线路、管路不磨碰。
4。
1。
7 车辆方向盘的最大自由转动量从中间位置向左右各不得大于30度。
4.1。
8 车辆转向应轻便灵活,行驶中不得轻飘、摆振、抖动、阻滞及跑偏现象。
在平直的道路上能保持车辆直线行驶,转向后能自动回正。
4。
1.9 转向机不得缺油、漏油,固定托架必须牢固.转向垂臂、横直拉杆等转向运动零件不得拼凑焊接,不得有裂纹、变形。
球头与球头座、转向节主销与衬套配合松紧适度,润滑良好。
4。
1。
10 行车制动装置的制动力、储备行程、踏板的自由行程及制动完全释放时间等指标应符合有关标准、规定及该车整车有关技术条件。
自动控制原理考研大纲排版:栏杆拍遍监制:风之子伊人归鸣谢:修水表的狠狠《自动控制原理》考试内容包括: 经典控制理论和现代控制理论两大部分。
第一章自动控制的一般概念知识点;控制系统的一般概念;名词术语、发展史、控制系统的分类、控制系统的组成、典型外作用、对控制系统的基本要求基本要求:掌握反馈控制的基本原理、根据系统工作原理图绘制原理方块图第二章控制的数学模型知识点:控制系统动态微分方程的列写用拉普拉斯变换求解线性微分方程的零初态响应与零输入响应运动模态的概念传递函数的定义和性质、典型元部件传递函数的求法控制系统结构图的绘制、等效变换、梅逊公式在结构图和信号流图中的应用基本要求:1.利用复阻抗建立电路结构图2.熟悉控制系统常用元部件的传递函数3.掌握控制系统结构图的绘制方法及基本等效变换4.用等效变换或梅逊公式求结构图或信号流图的各种传递函数第三章线性系统的时域分析法知识点:控制系统时域动态性能指标的定义与计算、误差的定义与稳态误差的计算系统稳定性的定义与判断法则、系统动态性能分析不作要求的内容:过阻尼二阶系统性能指标的估算公式非零初始条件下二阶系统的响应过程高阶系统的动态性能估算、赫尔维茨稳定判据动态误差系数、采用串级控制抑制内回路扰动基本要求:1.学会求出一阶系统的阶跃响应、会推导一阶系统动态性能指标的计算公式2.典型欠阻尼二阶系统动态性能指标的计算、性能指标与特征根的关系3.改善二阶系统动态性能指标的方法4.主导极点与偶极子的概念及其应用5.劳斯判据的应用6.静态误差系数、系统型别、稳态误差的计算。
7.扰动引起的误差的定义与计算方法8.减小和消除稳态误差的方法第四章线性系统的根轨法知识点:根轨迹的基本概念、根轨迹的模值条件与相角条件、根轨迹绘制的基本法则广义根轨迹、系统性能的分析不作要求的内容:根轨迹簇基本要求:1.学会由系统的特征方程求开环增益从零到无穷变化时的根轨迹方程(或开环零点、或开环极点从零到无穷变化)2.理解根轨迹的模值方程与相角方程的几何意义3.掌握零度根轨迹与1800度根轨迹的绘制法则4.学会由根轨迹分析系统稳定性、分析参数的选择对系统运动模态的影响第五章线性系统的频域分析法知识点:频率特性的概念及其图示法、开环频率特性的绘制奈奎斯特稳定判据、稳定裕度不作要求的内容:对数幅相曲线随机信号的频谱、确定闭环频率特性的图解方法基本要求:1.切记稳定系统的正弦响应的稳态输出是与输入同频率的正弦信号,幅值相角均随频率改变;其稳态误差也是与输入同频率的正弦信号,且幅值相角均改变。
美国西南航空公司——内部环境分析1、资源分析(1)飞机机型:除少量近程包机外,目前总共拥有客机377架,全部是波音77中短程客机,这为驾驶员随时接机飞行提供了方便。
能使用单一机型的原因:西南公司的航班都是点对点飞行,没有需要用餐的长途航班,更没有国际航班,而其他航空公司是无法做到这一点的,因为其需要根据不同类型的航线来选择购入不同型号的机型,这大幅度增加了飞机的管理成本。
例如,都使用波音77中短程客机,在大批量购入飞机时,可以与供应商波音公司讨价还价,以相比于其他航空更低的价格购买飞机,另外,在对飞机进行维护时,只需购买统一类型的零配件,节省零配件成本,而飞机维护是管理成本中的重要支出,这是很大的一优势,也是其他公司模仿和复制不了的。
(2)员工的战斗精神在过去的五年中,整个行业发生了根本性的变革,公司的员工迎接了许多挑战克服了无数困难。
现在许多航空公司在低成本低票价领域展开竞争,试图模仿该公司成功经历。
按照美西南的观点,有一样是这些公司无法模仿的——员工的战斗精神(Warrior Spirit of Employees)!在美西南,员工创造不同!公司的员工充满了激情。
他们内心理解成为“低成本领袖”的重要性。
消费者之所以选择美西南公司,这是因为公司持之以恒地提供他们所希望的——低票价、可靠的服务、高频度和顺便的航班、舒适的客舱、了不起的旅行经历、一流的常旅客项目、顺利的候机楼登机流程、以及友善的客户服务。
这些令顾客十分满意的服务由充满激情的员工一手缔造。
(3)公司独特的组织文化:以人为先,快乐工作美西南航在提高员工工作绩效方面非常注重组织文化建设的作用,希望能促使员工建立与企业发展目标相一致的价值观、假定、信念和行为规范,让员工自觉地发挥工作潜能,投入到促进公司发展的目标中去。
具体地说美西南航的组织文化具有以下的几个特点——强调公司“员工第一”的价值观:公司董事长Herb Kelleher认为信奉顾客第一的企业是老板可能对雇员做出的最大背叛之一。
一、问答题<本题共24分,每题6分)1、已知某系统闭环传递函数为,试估算系统单位阶跃响应的调节时间<=5%)。
2、某单位负反馈系统,其开环传递函数为G<s)二,当输入r<t)=3 时,试求该系统的稳定输出。
3、某系统的特征方程如下,+3+3+9-4s-12=Q请用劳斯判据判断系统的稳定性,并求出系统所有的特征方程。
4、已知系统的状态方程为二x+u<a为实数),试用李雅普诺夫第二方法判断系统的稳定性,并说明物理意义。
二、已知系统的结构图如图1所示1、求输入R<s)和扰动Nvs)同时作用下的系统输出Y<S ;2、若使系统输出完全不受扰动的影响,求,,,,,应满足的关系。
三、已知系统结构图如图2<a)所示,其中G<s)为无零点的二阶环节。
当(S>=Q时,系统单位阶跃响应如图2<b)所示r-H%)0 2(a)1.求G<S)的表达式。
2.若(S>=在输入r(t>=时,稳态误差为零,试确定a、b。
<15分)四、某正反馈系统的结构图如图3所示,试求:1.绘制参数a从0 Tx变化的根轨迹。
2•当系统稳定情况下,求阻尼比最小时的闭环传递函数。
<15 分)R⑸】(s + 4)(5 + a)+ ----------2s+3 v五、已知某最小相位系统的结构图如图4<a)所示。
其中,>0,前向通路G<s )的对数幅频特性曲线如图4<b )所示1. 求G<s )的表达式。
2•用奈氏稳定判据分析使闭环系统稳定的的取值范围六、系统结构图如图5所示,已知K=10, T=0.1时,截止频率=5.若 要求不变,如何改变K 和T 才能使系统相角裕度提高? <13分)七、某离散系统的结构图如图6所示,RG)1. 判断该系统的闭环稳定性;2. 若 r (t>=1(t>,求 c (2>、c (> 的数值。
南航自动化学院课程设计一、教学目标本课程的教学目标是使学生掌握南航自动化学院课程的核心知识,提高学生的实践能力,培养学生的创新精神。
具体目标如下:1.知识目标:学生能够理解并掌握南航自动化学院课程的基本概念、原理和方法,了解自动化技术在现代工业中的应用。
2.技能目标:学生能够运用所学知识解决实际问题,具备一定的自动化系统设计和调试能力。
3.情感态度价值观目标:学生能够认识到的自动化技术在现代社会中的重要性,培养学生的责任感和使命感,激发学生对自动化技术的兴趣和热情。
二、教学内容根据课程目标,本课程的教学内容主要包括南航自动化学院课程的基本概念、原理和方法,以及自动化技术在现代工业中的应用。
具体包括以下几个方面:1.自动化学院课程的基本概念:学生需要了解自动化技术的基本原理,掌握自动控制、智能控制等方面的基本概念。
2.自动化学院课程的原理和方法:学生需要学习自动控制系统的分析与设计方法,掌握常用控制算法和控制策略。
3.自动化技术在现代工业中的应用:学生需要了解自动化技术在工业生产、交通运输、医疗保健等领域的应用实例。
三、教学方法为了实现课程目标,本课程将采用多种教学方法,包括讲授法、讨论法、案例分析法、实验法等。
1.讲授法:教师通过讲解南航自动化学院课程的基本概念、原理和方法,使学生掌握基础知识。
2.讨论法:学生通过分组讨论,深入理解自动化技术在现代工业中的应用,培养学生的创新思维。
3.案例分析法:教师通过分析实际案例,引导学生运用所学知识解决实际问题,提高学生的实践能力。
4.实验法:学生在实验室进行自动化系统的设计与调试,培养学生的动手能力和团队协作精神。
四、教学资源为了保证教学效果,本课程将采用以下教学资源:1.教材:选用南航自动化学院课程的经典教材,为学生提供系统、全面的学习材料。
2.参考书:推荐学生阅读相关领域的参考书籍,丰富学生的知识体系。
3.多媒体资料:制作课件、教学视频等多媒体资料,提高学生的学习兴趣。
自动控制原理考试大纲:(南航)
《自动控制原理》考试内容包括: 经典控制理论和现代控制理论两大部分。
第一章自动控制的一般概念知识点:控制系统的一般概念:名词术语、发展史、控制系统的分类、控制系统的组成、典型外作用、对控制系统的基本要求基本要求:掌握反馈控制的基本原理、根据系统工作原理图绘制原理方块图第二章控制的数学模型知识点:控制系统动态微分方程的列写用拉普拉斯变换求解线性微分方程的零初态响应与零输入响应运动模态的概念传递函数的定义和性质、典型元部件传递函数的求法控制系统结构图的绘制、等效变换、梅逊公式在结构图和信号流图中的应用基本要求: 1.利用复阻抗建立电路结构图 2.熟悉控制系统常用元部件的传递函数 3.掌握控制系统结构图的绘制方法及基本等效变换 4.用等效变换或梅逊公式求结构图或信号流图的各种传递函数第三章线性系统的时域分析法知识点:控制系统时域动态性能指标的定义与计算、误差的定义与稳态误差的计算系统稳定性的定义与判断法则、系统动态性能分析不作要求的内容: 过阻尼二阶系统性能指标的估算公式非零初始条件下二阶系统的响应过程高阶系统的动态性能估算、赫尔维茨稳定判据动态误差系数、采用串级控制抑制内回路扰动基本要求: 1.学会求出一阶系统的阶跃响应、会推导一阶系统动态性能指标的计算公式 2.典型欠阻尼二阶系统动态性能指标的计算、性能指标与特征根的关系 3.改善二阶系统动态性能指标的方法 4.主导极点与偶极子的概念及其应用 5.劳斯判据的应用 6.静态误差系数、系统型别、稳态误差的计算。
7.扰动引起的误差的定义与计算方法 8.减小和消除稳态误差的方法第四章线性系统的根轨法知识点:根轨迹的基本概念、根轨迹的模值条件与相角条件、根轨迹绘制的基本法则广义根轨迹、系统性能的分析不作要求的内容: 根轨迹簇基本要求: 1.学会由系统的特征方程求开环增益从零到无穷变化时的根轨迹方程(或开环零点、或开环极点从零到无穷变化) 2.理解根轨迹的模值方程与相角方程的几何意义 3.掌握零度根轨迹与1800度根轨迹的绘制法则 4.学会由根轨迹分析系统稳定性、分析参数的选择对系统运动模态的影响第五章线性系统的频域分析法知识点:频率特性的概念及其图示法、开环频率特性的绘制奈奎斯特稳定判据、稳定裕度不作要求的内容: 对数幅相曲线随机信号的频谱、确定闭环频率特性的图解方法基本要求: 1.切记稳定系统的正弦响应的稳态输出是与输入同频率的正弦信号,幅值相角均随频率改变;其稳态误差也是与输入同频率的正弦信号,且幅值相角均改变。
2.掌握频率特性的计算方法 3.掌握典型环节的频率特性,其中振荡环节的两组特征点要记住。
4.开环系统幅相曲线的绘制,对数曲线的绘制,对数坐标系的应用 5.由最小相角系统的对数幅频渐近曲线求传递函数 6.奈奎斯特稳定判据、对数稳定判据 7.稳定裕度的物理意义,熟练掌握稳定裕度的计算第六章线性系统的校正方法知识点:系统的设计与校正问题、常用校正装置及其特性、串联校正、复合校正不作要求的内容: 串联综合法校正、串联工程设计方法、反馈校正基本要求:串联超前校正网络的设计、串联迟后校正网络的设计串联迟后-超前校正网络的设计、PID校正的特点、复合校正网络的设计第七章线性离散系统的分析与校正知识点:离散系统的基本概念、信号的采样与保持、Z变换定理、离散系统的数学模型离散系统的稳定性与稳态误差、动态性能分析、离散系统的数字校正基本要求: 1.采样与保持的物理描述与数学描述、香农采样定理 2.掌握零阶保持器的数学描述与频率特性 3.差分方程的概念、差分方程的求取与求解和 4.脉冲传递函数的概念与求法、离散系统输出
Z变换的求法 5.z域稳定判据、w域稳定判据、朱利稳定判据 6.离散系统的分析方法第八章非线性控制系统分析知识点:非线性控制系统概述、常见非线性特性及其对系统运动的影响、相平面法、描述函数法不作要求的内容: 由相轨迹绘制时间曲线、非线性控制的逆系统方法基本要求:(相平面法和描述函数法两种方法自取一种即可)线性系统的相轨迹、等倾线法、开关线、奇点及其类型、非线性系统的相轨迹非线性系统的等效变换、负倒描述函数曲线的绘制、非线性系统稳定性的判断自激振荡的判断、自振参数的确定第九章线性系统的状态空间分析与综合基本要求: 1.线性系统的状态空间描述 (1) 状态空间的基本概念 (2)状态空间表达式的建立 (3)状态空间表达式求解方法、状态转移矩阵及其性质 (4)传递函数阵 2.线性系统的可控性与可观性 (1) 线性系统可控性与可观性的基本概念 (2)线性系统可控性与可观性判据 (3) 可控标准型与可观标准型 3.线性定常系统的线性变换 (1)状态空间线性变换定义和性质 (2)对偶原理和规范分解 4. 线性定常系统的反馈结构及设计状态观测器 (1)传递函数的实现问题 (2)状态反馈与输出反馈 (3)极点配置 (4)状态观测器设计 5.李雅普洛夫稳定性分析 (1)李雅普洛夫意义稳定性的基本概念 (2)李亚普诺夫第一法和第二法 (3)线性定常系统稳定性分析。