FISHER定位器
- 格式:ppt
- 大小:5.78 MB
- 文档页数:54

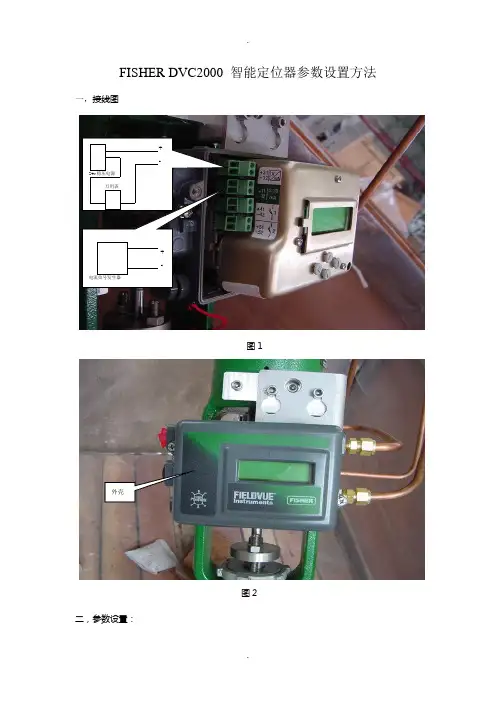
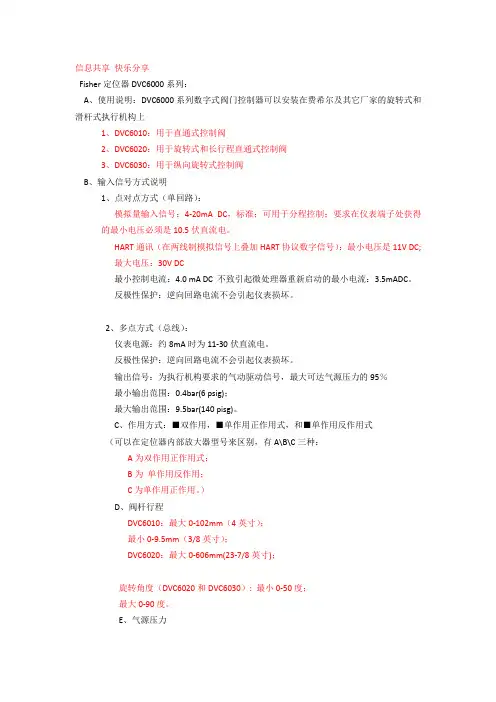
FISHER DVC2000 智能定位器参数设置方法一,接线图+-24v稳压电源万用表+-电流信号发生器图1外壳图2二,参数设置:1.先拆下外壳如图2,再按照图1进行接线,接着打开电流发生器电源送入4mA~20mA 电流信号,使LCD显示屏打开,然后进行语言选择。
操作方法:上下左右四键同时按住3秒,再用上下键在七种语言中选择您所需要的语种。
之后,按一下向右键以确认。
2.然后根据阀体的执行机构是气开式还是气闭式进行对参数设置。
如图3就是气闭式。
操作方法:按向下键找到“详细设置”选项,再按右键确认进入如果阀体的执行机构是:气开式(FC):按右键查找“零控制信号”项,再按上下键选择“阀关”按右键确认再按右键查找“行程变送器输出4mA”项,按上下键选择“阀关”按右键确认气闭式(FO):按右键查找“零控制信号”项,再按上下键选择“阀开”按右键确认再按右键查找“行程变送器输出4mA”项,按上下键选择“阀关”按右键确认3.行程自动标定设置操作方法:按向下键找到“行程标定”项,按右键确认进入,再按上下键选择“自动”按右键确认,LCD显示“按右键3秒钟阀门将动作”然后按照它的提示操作,它便可以自动搜索走完整个行程0%、100%、50%。
完成后按右键确认。
注:搜索途中不可退出,按任何键都不起作用,必须等走完整个行程才可以。
4.整定设置增益代码(C~M),C时阀门动作最慢,M时阀门动作最快。
选择合适的,一般设置为“L”,以阀门不振荡为准。
操作方法:按向下键找到“整定”项,按右键确认进入,再按上下键选择“自动”按右键确认,LCD显示“按右键3秒钟阀门将动作”然后按照它的提示操作,进入自动整定,接着等待,完成后按右键确认。
以后阀门在使用中出现振荡那就选择“手动”按右键确认,LCD 显示“按右键3秒钟阀门将动作”然后按照它的提示操作,进行整定值(增益代码)修改,至阀门不振荡为止。
5.其他参数设置值出厂时都已设置好无须改动,请参见FISHER DVC2000参数设置表。
信息共享快乐分享Fisher定位器DVC6000系列:A、使用说明:DVC6000系列数字式阀门控制器可以安装在费希尔及其它厂家的旋转式和滑杆式执行机构上1、DVC6010:用于直通式控制阀2、DVC6020:用于旋转式和长行程直通式控制阀3、DVC6030:用于纵向旋转式控制阀B、输入信号方式说明1、点对点方式(单回路):模拟量输入信号:4-20mA DC,标准;可用于分程控制;要求在仪表端子处获得的最小电压必须是10.5伏直流电。
HART通讯(在两线制模拟信号上叠加HART协议数字信号):最小电压是11V DC;最大电压:30V DC最小控制电流:4.0 mA DC 不致引起微处理器重新启动的最小电流:3.5mADC。
反极性保护:逆向回路电流不会引起仪表损坏。
2、多点方式(总线):仪表电源:约8mA时为11-30伏直流电。
反极性保护:逆向回路电流不会引起仪表损坏。
输出信号:为执行机构要求的气动驱动信号,最大可达气源压力的95%最小输出范围:0.4bar(6 psig);最大输出范围:9.5bar(140 pisg)。
C、作用方式:■双作用,■单作用正作用式,和■单作用反作用式(可以在定位器内部放大器型号来区别,有A\B\C三种:A为双作用正作用式;B为单作用反作用;C为单作用正作用。
)D、阀杆行程DVC6010:最大0-102mm(4英寸);最小0-9.5mm(3/8英寸);DVC6020:最大0-606mm(23-7/8英寸);旋转角度(DVC6020和DVC6030): 最小0-50度;最大0-90度。
E、气源压力推荐值:比执行机构要求的最大值高0.3bar(5psig)。
最大值:10.3bar(150psig)或执行机构最大压力额定值,取两者中较低者稳态空气耗量供气压力为1.4bar(20 psig)时:不于0.4标准m3/hr(14 scfh);供气压力为5.5bar (80 psig)时:小于1.3标准m3/hr(47 scfh)。
FISHER6200 485手操器校验步骤一、校验步骤:1进入菜单找到组态配置 2选择基本设置Guided Setup3.仪表模式切到离线状态4. 进去设备设置Device Setup选择压力单位。
5.选择定位器放大器作用类型6.选择控制类型。
7.最大供气压力。
8.选择执行机构制造商9.执行机构型号(不知道的都选其他) 10.执行机构尺寸11.选择阀门作用形式(故障位) 12.确认好后去设置行程传感器13.是否配置放大器,快排阀。
14.确认旁路助推器安装在阀座上。
15.确认放大器旁路助推器有旋开功能。
16.设备组态配置准备发送到仪表17.是否使用工厂默认设置(初始化) 18.选择NO完成设备设置,运行自动行程校验19.设备进入初始化。
20.设置完成是否切回在线模式。
二单独设置参数挂手操器读取菜单,定位器切到离线状态下,进入手动设置菜单组态里选择valve and actuator 可修改阀门和执行机构参数。
三手操器现场给阀位1.在维修工具菜单里选择Diagnostics2.点击Stroke Valve给阀位。
3.是否使用特定阀位。
选择(Disabled)禁用。
4.给阀位,选择设定目标值Step to Target5.给定自己想要的阀位值。
6.对阀位完成后,选择Done完成7.阀位核对完后,将仪表切回在线模式In Service四阀门自动校验1.在组态菜单里找到校验菜单Calibration2.选择行程校验Traver Calibration3.选择自动校验Auto Calibration4.是否连接自动校验选择Continue连接5.选择校验类型。
选标准自动校验Auto Calibrate-Standard6.点击进入后会弹出以下对话框。
①②7.选择NO进入自动校验。
FISHER费希尔定位器调试说明书DVC6000调试步骤:打开275/375手操器从主菜单(Main Menu)选择H art应用(HART Application)从On line找到该定位器。
依次进入Setup&Diag ——Detailed Setup——Mode——Instument Mode (或者按手操器上快捷键直接进入)——警告!in service 模式被送到仪表当中时阀门也许会动(WARNING!Valve may move whe n in Service mode is sent to the instrument.)按OK 后进入仪表模式(Instrument Mode)选择Ou t of service 后按ENTER——提示“Instrument m ode is already out of service!”后回到主界面依次进入 Setup&Diag——Basic Setup——Auto se tup——Setup Wizard:1、选择你所使用的压力单位(Pressure units (psi))后ENTER ;2、输入供气压力(Max Supply Press (psi))后EN TER;3、选择执行机构的生产厂家(Actuator Manufcture)后ENTER 以上品牌没的话选OTHER ;4、如果执行机构单作用带弹簧选3 、双作用带弹簧选4 、双作用不带弹簧选2;5、选ROTARY 下一步根据阀门零信号时是开选2 关的话选1 下一步再选1 下一步选YES自动选择阀门转向及其增益大小;6、选择是否有加速器或者快速释放阀(Is a Volume Booster or Quick Release Present ? );7、提示执行机构的信息正被发送到仪表当中,请稍等“Actuator information is being sent to the instrument. Please wait…”;8、选择使用出厂默认设置Use Factory defaults f or setup?(Yes is recommended for Initial Setu p) Yes 后ENTER ;9、提示出厂默认设置正被发送到仪表当中,请稍等“Factory default are being sent to the inst rument. Please wait…”;10、继续自动设置选择放大器调整“To continue A uto Setup.selec Relay Adjust ”;11、你是否希望现在进行放大器调整?(Do you wish to run Relay Adjustment Calibration now ?) 假如是双作用选择Yes 单作用选择No后ENTER ;12、选择行程标定(To continue.selec Auto Calib Travel.)按OK;13、你希望现在进行自动行程标定吗?(Do you wi sh to run Auto Travel Calib now ?selec YES if initial setup)选择Yes 后按 ENTER;14、警告!标定将导致仪表的输出突然变化按 OK;15、选择交点的调整(selec Crossover Adjust)Ma nual/Last Value/Default 正常情况下选择 defaul t 后 ENTER 假如默认的调整后精度比较差才会选择Manual手动;16、下面进入自动行程标定的过程,完成后仪表模式恢复到In service!。
费希尔定位器操作说明1.费希尔定位器是一款高精度定位设备,广泛应用于工业自动化、机器人导航等领域。
本文档将介绍费希尔定位器的基本操作流程和注意事项。
2. 准备工作在开始操作费希尔定位器之前,需要确保以下准备工作已完成:•确保费希尔定位器已正确安装并连接到电源。
•确保计算机已正确连接到费希尔定位器的控制接口。
•确保操作系统已正确安装了费希尔定位器的驱动程序。
3. 操作流程3.1 连接设备首先,确保计算机已正确连接到费希尔定位器的控制接口。
可以通过USB接口或者以太网接口连接。
3.2 启动软件在计算机上启动费希尔定位器的控制软件。
根据实际情况,选择合适的软件版本。
3.3 打开设备在软件界面上找到设备连接选项,点击打开设备按钮。
软件会尝试连接到费希尔定位器,并显示连接状态。
3.4 设置参数在软件界面上找到参数设置选项,点击进入参数设置页面。
根据实际需求,设置适当的参数,如定位精度、扫描范围等。
3.5 执行任务在软件界面上找到任务执行选项,点击进入任务执行页面。
输入任务相关的参数,如目标位置、移动速度等。
点击开始执行任务按钮,费希尔定位器将开始执行任务。
3.6 监控定位结果在执行任务过程中,可以通过软件界面上的监控选项,实时监控费希尔定位器的定位结果。
根据实际需求,可以选择显示位置、速度、加速度等参数。
3.7 结束任务任务执行完成后,点击结束任务按钮,费希尔定位器将停止任务并返回到初始位置。
4. 注意事项•在操作费希尔定位器之前,请确保已经完全理解并掌握相关安全操作规程,以避免潜在的危险。
•在操作费希尔定位器过程中,应注意避免突然停止或者快速启动,避免对设备造成损坏。
•在操作费希尔定位器过程中,应注意避免碰撞或者强烈震动,避免影响设备的定位精度。
•在操作费希尔定位器过程中,应随时注意监控设备的状态,如温度、电源、通信等,确保设备正常运行。
5.本文档介绍了费希尔定位器的基本操作流程和注意事项。
通过正确的操作和合理的使用,可以充分发挥费希尔定位器的定位能力,提高工作效率和精度。
FISHER阀门定位器介绍FISHER阀门定位器是一种用于控制和调节阀门位置的装置。
它能够准确测量和控制阀门的开度,实时调整阀门位置,以达到所需的流量控制和压力调节。
FISHER是一家知名的工业自动化公司,其阀门定位器被广泛应用于石油化工、电力、水处理、制药等行业。
1.高精度测量:FISHER阀门定位器采用先进的传感器技术,能够实时准确地测量阀门的开度,并反馈给控制系统。
其测量精度可达到高达0.1%。
2.宽工作范围:FISHER阀门定位器适用于各种类型的阀门,包括蝶阀、球阀、蜗轮蜗杆阀等。
无论是小型阀门还是大型阀门,都能够实现精确的位置控制。
3. 快速反应速度:FISHER 阀门定位器能够快速响应控制系统的指令,实时调整阀门的位置。
其响应时间通常在10ms以内,确保流程控制的灵活性和高效性。
4.可远程控制:FISHER阀门定位器支持远程控制,可以通过现场总线或无线通信等方式进行远程监控和操作。
这使得操作人员可以方便地调整阀门位置,减少了人工干预的复杂性和风险。
5.易于安装和维护:FISHER阀门定位器采用模块化设计,安装和维护便捷。
其具有自动校准和自学习功能,能够自动适应阀门的特性,减少了调试和维护的工作量。
6.高可靠性和耐用性:FISHER阀门定位器采用高品质的材料和先进的制造工艺,具有良好的耐腐蚀性和耐高温性能。
其设计经过严格的耐久性测试,能够在恶劣的工作环境下长时间稳定运行。
除了以上的特点和优势,FISHER阀门定位器还具有一些附加功能,以满足不同行业和应用的需求。
例如,它可以支持多种通信协议,实现与其他设备的无缝集成;它可以提供诊断和报警功能,监测阀门的运行状态和故障情况;它还可以记录和存储阀门的运行数据,便于分析和优化流程控制。
总之,FISHER阀门定位器是一种高精度、高性能的阀门控制装置,广泛应用于各个领域的流程控制和压力调节。
它能够提高流程的稳定性和可靠性,降低能耗和运行成本。
与传统的手动调节方法相比,FISHER阀门定位器具有更高的自动化水平和精确度,为工业生产带来更多的便利和效益。


Fisher DVC5000/6000系列智能定位器一、FisherDVC5000/6000系列定位器原理Fisher DVC5000/6000系列智能定位器的结构原理图如下图所示智能定位器结构原理图其工作原理是,控制器来的控制信号经端子盒进到印刷线路板子模块,在这里被微处理器读取后经数字算法处理后转换成模拟量后送给I/P转换器。
当信号改变时I/P转换器的线圈和衔铁之间的磁吸引力改变,并因此改变了喷嘴挡板间的距离进而改变了喷嘴背压,该背压经放大器放大后送给执行机构并通过执行机构改变阀杆的位置。
阀行程传感器通过反馈杆感受阀杆位置的变化,并将此信号反给印刷线路板组件参与计算。
当阀杆位置达到正确位置,阀杆位置信号反到印刷线路板组建,经过处理后使I/P驱动信号稳定下来,则喷嘴背压稳定下来,则到执行机构的输出力也稳定下来阀杆位置不再变化。
二、安装要点Fisher智能定位器对安装要求较严格,以往的经验表明,以前的几次阀门校验出错都是因为安装错误造成的。
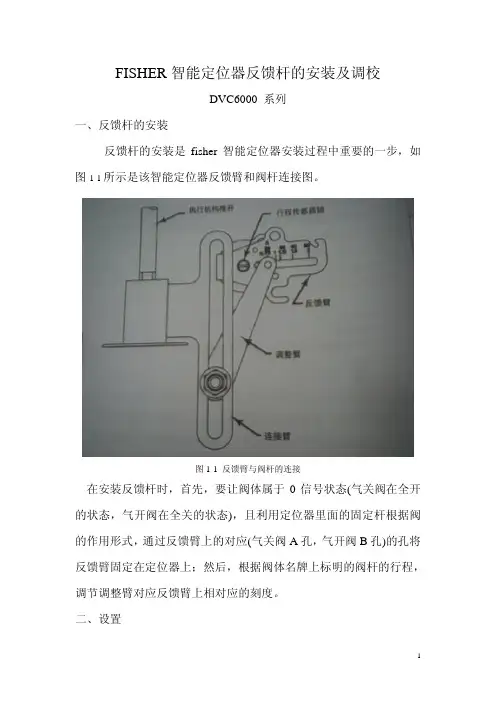
Fisher智能定位器的反馈杆如图所示其上有A、B两个孔来确定连接位置。
当阀门为风开阀时,定位销钉穿过A孔插入定位器表体上的固定孔,当阀门为风关阀时,定位销钉穿过B孔插入定位器表体上的固定孔来确定连接位置。
然后将十字架的连接杆放入反馈杆的槽内,其所放位置与该阀的行程相对应。
三、275型HART通讯器简介HART通讯器各部分功能如图所示:校验时将HART编程器的引出线接到定位器的LOOP+与LOOP-端子,接线时不分极性。
四、初始设置和校准4.1为了对定位器进行设置和校准必须用HART编程器将仪表模式必须设成“Out of service”并且将保护设为“None”。
如果仪表模式不在“Out of service”模式下时,则按以下步骤将仪表模式设为“Out of service”。
1、将HART编程器接好并打开电源。
2、按HART编程器上的热键并选择仪表模式或从主菜单→详细设置→模式(Mode)→仪表模式(Instrument Mode)来选择仪表模式。
Fisher定位器应用解释书【1 】一、Fisher定位器调校根本步调1.将375手操器衔接到接线端子上,进入菜单选择 Setup(设置)→Basic setup(根本设置)→Auto setup(主动设置)→Setup wizard(设置领导)2.依据Setup wizard的提醒选择响应的参数⑴instrument mode is in service ,continue for prompts to please outof service.内心模式是在线状况,持续需要准时设置为离线状况选择 Yes.⑵output will not track input when instrument mode is out of service.当内心在离线状况时,内心的输出将不随输入的变更而变更选择Yes.⑶change to out of service to continue.持续需转变成离线模式选择out of service选择enter解释:内心正常工作时其模式为in service状况,当对内心进行调校时需改为out of service状况.⑷Tru/Press select 行程/压力选择选择Travel control⑸Pressure units 压力单位选择psi⑹Max supply press 最大供气压力此时输入的最大供气压力值应与空气过滤减压阀的输出压力一致,此值不宜过大,过大,阀门易破坏,超行程.应调剂空气过滤减压阀使阀门刚好全行程,这时输入此时的压力值.⑺Actuator manufacturer 履行机构制作商选择Fisher controls⑻Actuator model 履行机构型号检讨阀体上的铭牌,有此履行机构型号,选择响应型号,如667,1035,1051等.⑼Actuator size 履行机构尺寸检讨阀体上的铭牌,有此履行机构尺寸,选择响应尺寸,如30,34,40,45,50,46,60,70,100等.⑽setup wizard is ready to send config to the Drc6000选择send⑾use factory default 应用工场默认,选择Yes.⑿To finish setting up the value run Auto Travel Calib完成阀门设置运行主动行程调校,选择OK.⒀Warning! Calibration will cause sudden changes in instrument output , continue?警告!调校将造成内心输出忽然转变,是否持续?选择Yes.⒁select crossover adjust 选择交叉点调剂Ⅰ.Manual 手动Ⅱ.Last vale 上一次值Ⅲ.Default 默认值(缺省值)假如是初次校验行程,推举选择Manual调剂,选择Enter.⒂内心开端主动行程校验校验停止后,将提醒把内心设置到in service状况.解释:在调试内心前应先调剂交叉点.即DCS给定位器50%的旌旗灯号,调剂定位器的调剂臂,直到反馈臂与阀杆成90°直角.完成这项调剂后,再开端375手操器调校.二、在调校进程中消失的错误及处理办法⑴Auto Calibration Failed:Driver signal exceed high limit checksupply pressure.主动调校掉败:装备旌旗灯号超出了最高限,查对供气压力.处理办法:Ⅰ.检讨供气压力是否太大,假如太大,恰当下降供气过滤阀的输出压力.Ⅱ.检讨Actuator size,选择的尺寸是否和铭牌上一致.⑵input current must exceed 3.8 mA for calibration.校验时输入电流必须超出3.8 mA.习惯上校验时,给12 mA旌旗灯号.⑶Calibration Aborted,An end point was not reached.校验废弃,未达到行程终点.处理办法:Ⅰ.此时应检讨,地位反馈及行程传感器衔接是否无缺.Ⅱ.调校行程传感器是否在划定的规模内.。
fisher定位器原理
Fisher定位器原理概述
Fisher定位器原理是指通过电子设备发射出的信号,利用被搜索物体
对该信号的反射或衰减,以确定该物体的方位和位置的一种技术原理。
该定位器原理常用于货物或搜救任务中寻找有问题、缺失或困难物品
的位置。
Fisher定位器原理详细解释
Fisher定位器原理涉及到基本的高频传输原理。
该原理使用电子设备
发射出的高频信号。
这些信号被搜索物体反射,以产生干扰信号。
搜
索设备拾取反射和干扰信号,将其分析和解释,以识别和标示物体。
此技术可以使用在土壤中的各种金属,水中的物体,建筑材料和其他
任何可以对电子导体产生反应的材料中。
这种技术可以被广泛地应用
在许多行业中,比如建筑,石油和天然气开采,机械制造,军事等等。
Fisher定位器原理的应用
应用Fish定位器原理可以快速定位出被搜索物品的方位和位置。
该技
术也可以用于水中搜寻,因为它可以追踪被水反射和衰减的信号,从而大大提高瞄准的准确性。
Fish定位器原理的另一个优势是其能够在不同的环境中工作,从而适用于许多行业和应用。
结论
总之,Fish定位器原理是通过电子设备发出信号,利用被搜索物体反射或衰减信号的原理来确定物体方位和位置的一种技术原理。
该原理已经广泛应用于许多行业。
它的主要优势是它的适用性和准确性。
FISHER(HART协议)定位器调试操作说明书一、1、定位器接线:(4—20mA信号、475手操器HART协议信号)接LOOP(+、‐)端子,如下图所示:2、定位器调试前必须查看磁条装配位置、是否碰到定位器,哈弗指针是否对准行程牌。
如下图所示:二、定位器修改位号和快速校验步骤:下图手操器界面说明:Power:电源Backlight:灯光Page up、Page down:上下翻页键Delete:下一级菜单键Back Space:返回键Fn+Backlight:手操器重启组合键1、2.。
9:为按钮键Tab:制表符1、按电源键打开475手操器,按Enter键点击HART图标后将进入下一步,如下图所示:2、按下键选择Online(使手操器处于在线模式)图标后按右键进入下一步,如下图所示:3、按下键选择Configure(配置)图标后按右键进入下一步,如下图所示:4、按下键选择Manual Setup(手动设置、相当于参数设置)图标后按右键进入下一步,如下图所示:5、按下键选择lnstrument(设备)图标后按右键进入下一步,如下图所示:(这一步是更改位号)6、按下键选择ldentification(识别)图标后按右键进入下一步,如下图所示:7、根据指示单位号进行修改,修改完成后按ENTER键,如下图所示:8、修改完HART Tag(位号)后,HART Tag(位号)图标前会出现*型标记,这时按SEND 键进行发送保存位号,如下图所示:9、修改完位号后,按左键返回到Manual Setup(手动设置、相当于参数设置)图标下,然后按下键到Calibration(校验)图标下后按右键进入下一步,如下图所示:(这一步开始快速整定定位器)10、选择Travel Calibration(行程校验)图标后按右键进入下一步,如下图所示:11、按下键选择Auto Calibration(自动校验)图标后按右键进入下一步,如下图所示:12、更改定位器模式(In Service(投用模式)、Out of Service(非投用模式)),按下键选择Out of Service(非投用模式),然后按ENTER键,进入下一步,如下图所示:定位器整定过程中,模式必须更改为Out of Service(非投用模式)手操器上显示的这句话意思:(警告:当模式更改为Out of Service(非投用模式)时,定位器的输出将不受输入信号控制)13、选择Continue(继续)图标后按ENTER键进入下一步,如下图所示:手操器上显示的这句话意思:(警告:设备的输出在校验过程中将发生改变)14、定位器开始整定(寻找阀门行程最高点、最低点、中间点、定位器开始模块运算和优化)如下图所示:15、自动校验完成后按OK键,然后把定位器模式改回In Service(投用模式),如下图所示:整定完成后必须把模式更改回In Service(投用模式),不然中控给定输入信号后,阀门将不动作。