单级倒立摆设计
- 格式:doc
- 大小:256.50 KB
- 文档页数:14
单级倒立摆系统的建模与控制器设计摘要:本文主要研究的是单级倒立摆的建模、控制与仿真问题。
倒立摆是一类典型的快速、多变量、非线性、强耦合、自然不稳定系统。
由于在实际中有很多这样的系统,因此对它的研究在理论上和方法论上均有深远的意义。
本文首先建立了单级倒立摆的数学模型,对其进行了近似线性化处理,得到了它的状态空间描述,并对系统的开环特性进行了仿真和分析。
然后,基于极点配置方法设计了单级倒立摆系统的控制器。
最后,用Matlab对系统进行了数值仿真,验证了所设计的控制算法的有效性。
1、绪论------------------------------------------------------------- 12、单级倒立摆系统的建模与分析--------------------------------------- 32.1 单级倒立摆系统的建模---------------------------------------- 32.2 单级倒立摆系统的模型分析------------------------------------ 63、单级倒立摆系统的极点配置控制器设计------------------------------ 113.1 单级倒立摆系统控制器设计的目标----------------------------- 113.2 单级倒立摆系统的能控性分析--------------------------------- 113.3 单级倒立摆系统的极点配置控制器设计------------------------- 123.4 闭环系统仿真分析------------------------------------------- 134、PID控制器的设计与分析------------------------------------------ 184.1、PID控制的基本原理----------------------------------------- 184.2、方案设计-------------------------------------------------- 184.3、PID控制设计分析------------------------------------------- 204.4、软件仿真调试结果------------------------------------------ 204.5、与极点控制器结果对比分析---------------------------------- 225、结论------------------------------------------------------------ 23 致谢--------------------------------------------------------------- 24 参考文献----------------------------------------------------------- 251、绪论倒立摆控制系统是一个复杂的、不稳定的、非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台。
摘要倒立摆系统是一个典型的快速、多变量、非线性、不稳定系统,对倒立摆的控制研究无论在理论上和方法上都有深远的意义。
本论文以实验室原有的直线一级倒立摆实验装置为平台,重点研究其PID控制方法,设计出相应的PID控制器,并将控制过程在MATLAB上加以仿真。
本文主要研究内容是:首先概述自动控制的发展和倒立摆系统研究的现状;介绍倒立摆系统硬件组成,对单级倒立摆模型进行建模,并分析其稳定性;研究倒立摆系统的几种控制策略,分别设计了相应的控制器,以MATLAB为基础,做了大量的仿真研究,比较了各种控制方法的效果;借助固高科技MATLAB实时控制软件实验平台;利用设计的控制方法对单级倒立摆系统进行实时控制,通过在线调整参数和突加干扰等,研究其实时性和抗千扰等性能;对本论文进行总结,对下一步研究作一些展望。
关键词:一级倒立摆,PID,MATLAB仿真目录第1章MATLAB仿真软件的应用 (9)1.1 MA TLAB的基本介绍 (9)1.2 MA TLAB的仿真 (9)1.3 控制系统的动态仿真 (10)1.4 小结 (12)第2章直线一级倒立摆系统及其数学模型 (13)2.1 系统组成 (13)2.1.1 倒立摆的组成 (14)2.1.2 电控箱 (14)2.1.3 其它部件图 (14)2.1.4 倒立摆特性 (15)2.2 模型的建立 (15)2.2.1 微分方程的推导 (16)2.2.2 传递函数 (17)2.2.3 状态空间结构方程 (18)2.2.4 实际系统模型 (20)2.2.5 采用MA TLAB语句形式进行仿真 (21)第3章直线一级倒立摆的PID控制器设计与调节 (34)3.1 PID控制器的设计 (34)3.2 PID控制器设计MA TLAB仿真 (36)结论 (41)致谢 (42)参考文献 (43)第1章 MATLAB仿真软件的应用1.1 MATLAB的基本介绍MTALAB系统由五个主要部分组成,下面分别加以介绍。
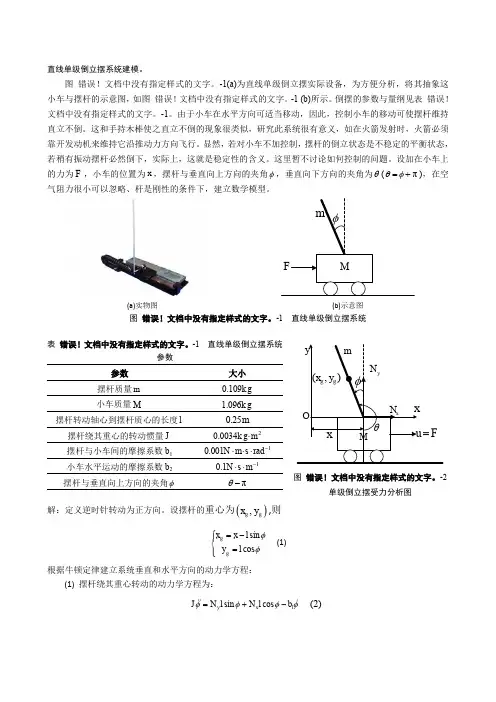
直线单级倒立摆系统建模。
图 错误!文档中没有指定样式的文字。
-1(a)为直线单级倒立摆实际设备,为方便分析,将其抽象这小车与摆杆的示意图,如图 错误!文档中没有指定样式的文字。
-1 (b)所示。
倒摆的参数与量纲见表 错误!文档中没有指定样式的文字。
-1。
由于小车在水平方向可适当移动,因此,控制小车的移动可使摆杆维持直立不倒。
这和手持木棒使之直立不倒的现象很类似,研究此系统很有意义,如在火箭发射时,火箭必须靠开发动机来维持它沿推动力方向飞行。
显然,若对小车不加控制,摆杆的倒立状态是不稳定的平衡状态,若稍有振动摆杆必然倒下,实际上,这就是稳定性的含义。
这里暂不讨论如何控制的问题。
设加在小车上的力为F ,小车的位置为x ,摆杆与垂直向上方向的夹角φ,垂直向下方向的夹角为θ(πθφ=+),在空气阻力很小可以忽略、杆是刚性的条件下,建立数学模型。
(a)实物图(b)示意图图 错误!文档中没有指定样式的文字。
-1 直线单级倒立摆系统表 错误!文档中没有指定样式的文字。
-1 直线单级倒立摆系统参数参数 大小 摆杆质量m 0.109kg 小车质量M1.096k g摆杆转动轴心到摆杆质心的长度l 0.25m摆杆绕其重心的转动惯量J 20.0034k g m ⋅摆杆与小车间的摩擦系数b 1 10.001N m s rad -⋅⋅⋅ 小车水平运动的摩擦系数b 2 10.1N s m -⋅⋅摆杆与垂直向上方向的夹角φπθ-图 错误!文档中没有指定样式的文字。
-2单级倒立摆受力分析图解:定义逆时针转动为正方向。
设摆杆的重心为(),g g x y ,则sin cos g gx x l y l φφ=-⎧⎪⎨=⎪⎩ (1) 根据牛顿定律建立系统垂直和水平方向的动力学方程:(1) 摆杆绕其重心转动的动力学方程为:1sin cos y x J N l N l b φφφφ=+- (2)式中,J 为摆杆绕其重心的转动惯量:22112123J mL L l ml ==。
单级倒立摆系统课程设计一、课程目标知识目标:1. 理解单级倒立摆系统的基本原理,掌握其数学模型和动力学特性;2. 学会分析单级倒立摆系统的稳定性,并掌握相应的控制策略;3. 掌握利用传感器和执行器实现单级倒立摆系统的实时控制方法。
技能目标:1. 能够运用所学的理论知识,设计并搭建单级倒立摆实验系统;2. 能够编写程序,实现对单级倒立摆系统的实时控制,使系统保持稳定;3. 能够分析实验数据,优化控制参数,提高系统性能。
情感态度价值观目标:1. 培养学生对物理系统控制原理的兴趣,激发学生探索科学技术的热情;2. 培养学生的团队协作意识和解决问题的能力,增强学生的自信心;3. 引导学生关注科技创新,认识到所学知识在实际应用中的价值。
课程性质:本课程为理论与实践相结合的课程,旨在帮助学生将所学的理论知识应用于实际系统中,提高学生的实践能力和创新能力。
学生特点:学生具备一定的物理、数学基础,对控制原理有一定了解,但实践经验不足。
教学要求:注重理论与实践相结合,鼓励学生动手实践,培养解决实际问题的能力。
在教学过程中,注重引导学生自主学习,培养学生的创新意识和团队协作精神。
通过本课程的学习,使学生能够将所学知识应用于实际系统,提高自身综合素质。
二、教学内容1. 理论知识:- 单级倒立摆系统的基本原理及数学模型;- 单级倒立摆系统的稳定性分析;- 控制策略及控制算法在单级倒立摆系统中的应用;- 传感器和执行器在单级倒立摆系统中的作用及选型。
2. 实践操作:- 搭建单级倒立摆实验系统;- 编写程序实现实时控制;- 调试优化控制参数;- 分析实验数据,提高系统性能。
3. 教学大纲:- 第一周:介绍单级倒立摆系统基本原理,学习数学模型,进行稳定性分析;- 第二周:学习控制策略及控制算法,探讨其在单级倒立摆系统中的应用;- 第三周:了解传感器和执行器,学习其在单级倒立摆系统中的作用及选型;- 第四周:分组搭建单级倒立摆实验系统,进行程序编写和实时控制;- 第五周:调试优化控制参数,分析实验数据,提高系统性能。
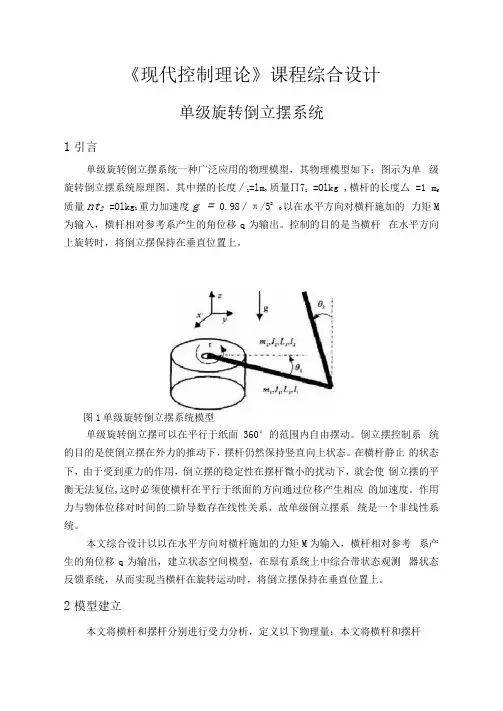
《现代控制理论》课程综合设计单级旋转倒立摆系统1引言单级旋转倒立摆系统一种广泛应用的物理模型,其物理模型如下:图示为单级旋转倒立摆系统原理图。
其中摆的长度∕1=lm,质量∏71 =Olkg ,横杆的长度厶 =1 m f 质量nt2 =Olkg1重力加速度g =0.98∕π/52O以在水平方向对横杆施加的力矩M 为输入,横杆相对参考系产生的角位移q为输出。
控制的目的是当横杆在水平方向上旋转时,将倒立摆保持在垂直位置上。
图1单级旋转倒立摆系统模型单级旋转倒立摆可以在平行于纸面360°的范围内自由摆动。
倒立摆控制系统的目的是使倒立摆在外力的推动下,摆杆仍然保持竖直向上状态。
在横杆静止的状态下,由于受到重力的作用,倒立摆的稳定性在摆杆微小的扰动下,就会使倒立摆的平衡无法复位,这时必须使横杆在平行于纸面的方向通过位移产生相应的加速度。
作用力与物体位移对时间的二阶导数存在线性关系,故单级倒立摆系统是一个非线性系统。
本文综合设计以以在水平方向对横杆施加的力矩M为输入,横杆相对参考系产生的角位移q为输出,建立状态空间模型,在原有系统上中综合带状态观测器状态反馈系统,从而实现当横杆在旋转运动时,将倒立摆保持在垂直位置上。
2模型建立本文将横杆和摆杆分别进行受力分析,定义以下物理量:本文将横杆和摆杆M-NI 2=J 2d~θx分别进行受力分析,定义以下物理量:M 为加在横杆上的力矩;〃勺为摆杆质量; 厶为摆杆长度;人为摆杆的转动惯量;“为横杆的质量;厶为横杆的长度;厶为 横杆的转动惯量;q 为横杆在力矩作用下转动的角度;g 为摆杆与垂直方向的夹 角;N 和H 分别为摆杆与横杆之间相互作用力的水平和垂直方向的分量。
倒立 摆模型受力分析如图2所示。
图2倒立摆模型受力分析 摆杆水平方向受力平衡方程:NM I 牛甸/+O + ? Sina) (∕2-横杆的转动弧长即位移)摆杆垂直方向受力平衡方程:〃2 I I卑g=卑 2叶一寸COSq)Ur 2 2摆杆转矩平衡方程:横杆转矩平衡方程:XX考虑到摆杆在设定点q,Q=o 附近做微小振动,对上式进行线性化,即• ml JSi 吨≈q, cos^2 ≈1 ‘心0,其中八〒,近似线性化得到,JlN = OΛ-(Θ +OM (IV ・//-0.98 = 0 1 /1If)——= H ∙0.5IN ∙0.5∙l 30 dfM-N = -^∙30 dr整理上式可得倒立摆的状态方程:1 ∙∙ ∙∙—q —0 + 14.70—15M<4 ∙∙ 1 ∙∙-<91 + -6>2-10M =O l3 2本文参数代入计算可得:& =-4.642Q+11.05 3M Q= 12.3790—9.474M■x=q=[ι 0 0 0]■■ ■X =■ qO I■O^Λ ^^0χ2OO -¾.OO"P ■O 尤2 + 11.053 1O O9.474取状态变量如下:故1 OO -4.642 O O O 12.3793稳定性和能控性分析3.1稳定性分析判断一个系统是否稳定,只需判断该系统传递函数的极点是否都在左半平面。
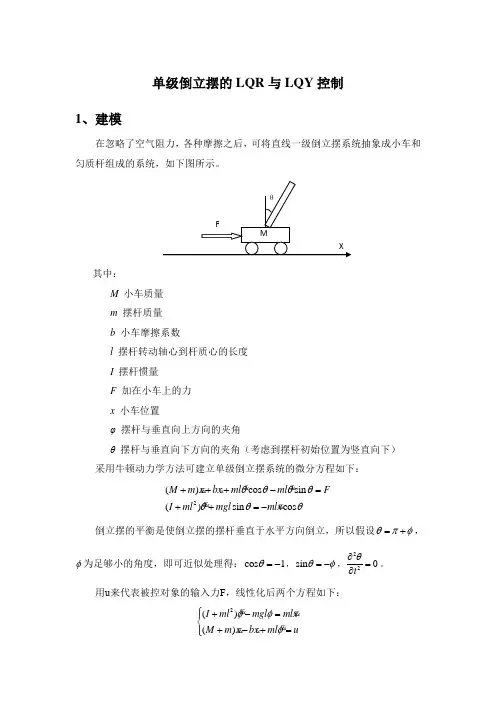
单级倒立摆的LQR 与LQY 控制1、建模在忽略了空气阻力,各种摩擦之后,可将直线一级倒立摆系统抽象成小车和匀质杆组成的系统,如下图所示。
其中:M 小车质量 m 摆杆质量 b 小车摩擦系数l 摆杆转动轴心到杆质心的长度 I 摆杆惯量 F 加在小车上的力 x 小车位置φ 摆杆与垂直向上方向的夹角θ 摆杆与垂直向下方向的夹角(考虑到摆杆初始位置为竖直向下) 采用牛顿动力学方法可建立单级倒立摆系统的微分方程如下:2()cos sin ()sin cos M m x bx ml ml F I ml mgl mlx θθθθθθθ+++-=++=-倒立摆的平衡是使倒立摆的摆杆垂直于水平方向倒立,所以假设θπφ=+,φ为足够小的角度,即可近似处理得:cos 1θ=-,sin θφ=-,220tθ∂=∂。
用u 来代表被控对象的输入力F ,线性化后两个方程如下:2()()I ml mgl mlxM m x bx ml u φφφ⎧+-=⎪⎨+-+=⎪⎩取状态变量:1234x x x x x x x θθ⎡⎤⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥==⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦即摆杆的角度和角速度以及小车的位移和速度四个状态变量。
则系统的状态方程为:122122342224122()()()()()x x mgl M m ml x x uI M m Mml I M m Mml x x m gl I ml x x u I M m Mml I M m Mml =⎧⎪+-⎪=+++++⎪⎨=⎪⎪+=+⎪++++⎩将上式写成向量和矩阵的形式,就成为线性系统的状态方程:x Ax Bu y Cx x θ=+⎡⎤==⎢⎥⎣⎦这里设:21.320.070.1//0.200.0009M Kg m Kgb N m s l m I Kgm =====将参数带入,有:010038.182500000010.384700002.803700.747710000010A B C ⎡⎤⎢⎥⎢⎥=⎢⎥⎢⎥-⎣⎦⎡⎤⎢⎥-⎢⎥=⎢⎥⎢⎥⎣⎦⎡⎤=⎢⎥⎣⎦2、LQR 控制线性二次型是指系统的状态方程是线性的,指标函数是状态变量和控制变量的二次型。
单级移动倒立摆建模及控制器设计matlab 单级移动倒立摆是一种常见的控制系统模型,它在机器人控制、自动驾驶等领域有着广泛的应用。
本文将介绍如何使用MATLAB进行单级移动倒立摆的建模和控制器设计。
首先,我们需要了解单级移动倒立摆的基本原理。
单级移动倒立摆由一个垂直的杆和一个可以在水平方向上移动的小车组成。
小车上有一个可以旋转的杆,杆的一端连接着小车,另一端有一个质量块。
通过控制小车的位置和杆的角度,我们可以实现倒立摆的平衡。
接下来,我们开始建立单级移动倒立摆的数学模型。
首先,我们需要定义系统的状态变量。
在这个模型中,我们可以选择小车的位置x、小车的速度v、杆的角度θ和杆的角速度ω作为状态变量。
然后,我们可以根据物理原理建立系统的动力学方程。
根据牛顿第二定律和角动量守恒定律,我们可以得到如下的动力学方程:m*x'' = F - m*g*sin(θ) - m*l*θ'^2*cos(θ)m*l^2*θ'' = -m*g*l*sin(θ) + m*l*x''*cos(θ) - b*θ'其中,m是小车和质量块的总质量,l是杆的长度,F是施加在小车上的外力,g是重力加速度,b是杆的阻尼系数。
接下来,我们可以使用MATLAB进行模型的建立和仿真。
首先,我们需要定义系统的参数和初始条件。
然后,我们可以使用ode45函数来求解系统的动力学方程。
ode45函数是MATLAB中用于求解常微分方程的函数,它可以根据给定的初始条件和参数,计算出系统在一段时间内的状态变化。
在求解动力学方程之后,我们可以得到系统的状态变量随时间的变化。
通过绘制状态变量随时间的曲线,我们可以观察到系统的动态行为。
例如,我们可以绘制小车位置随时间的变化曲线,以及杆角度随时间的变化曲线。
最后,我们需要设计一个控制器来实现单级移动倒立摆的平衡。
常见的控制器设计方法包括PID控制器和模糊控制器。
单级倒立摆控制系统设计及MATLAB中的仿真第一步是建立单级倒立摆的数学模型。
单级倒立摆可以通过旋转关节将一根质量均匀的细杆与一个平台相连。
细杆的一端固定在平台上,另一端可以自由旋转。
细棒的旋转角度用θ表示,质心的位置用x表示。
根据牛顿力学和杆的动力学方程,可以得到如下数学模型:1.摆杆的运动方程:Iθ'' + mgl sin(θ) = u - F (1)其中,I是摆杆的转动惯量,m是摆杆的质量,g是重力加速度,l是摆杆的长度,u是控制输入(摆杆上的转动力矩),F是摩擦力。
2.质心的运动方程:m(x'' - lθ'²cos(θ)) = F (2)接下来是设计控制器来控制单级倒立摆。
一个常用的控制方法是使用线性化控制理论,其中线性化是将系统在一些工作点附近线性近似。
在这种情况下,将摆杆保持在垂直方向,并使质心静止作为工作点。
线性化系统的转移函数为:H(s) = θ(s)/u(s) = (ml²s² + mg)/(s(ml² + I))为了稳定单级倒立摆,可以使用自动控制理论中的反馈控制方法,特别是状态反馈。
状态反馈根据系统的状态变量来计算控制器输入。
为了设计状态反馈控制器,首先需要判断系统的可控性和可观测性。
根据控制系统理论,如果系统是可控和可观测的,则可以设计一个线性状态反馈控制器来稳定系统。
在MATLAB中,可以使用控制系统工具箱来设计单级倒立摆的控制系统。
首先,通过建立系统的传递函数模型(由线性化系统得到)来定义系统。
然后,使用控制系统工具箱中的函数来计算系统的稳定极点,并确定所需的反馈增益以稳定系统。
最后,可以使用MATLAB的仿真工具来模拟单级倒立摆的响应,并进行性能分析。
在进行仿真时,可以将倒立摆的初始状态设置为平衡位置,并应用一个输入来观察系统的响应。
可以通过调整控制器增益和系统参数来改变系统响应的性能,例如收敛时间、超调量和稳态误差。
基于MATLAB的单级倒立摆控制系统设计单级倒立摆是一种常见的控制系统,其结构简单,但具有较强的动态控制性能。
本文基于MATLAB对单级倒立摆控制系统进行设计,并详细介绍了设计过程和结果。
首先,我们需要了解单级倒立摆的结构和动力学模型。
单级倒立摆由轴、电机和旋转杆组成,电机通过轴和旋转杆相连。
倒立摆的目标是使旋转杆竖直,即使旋转杆的角度保持为0°。
为了实现倒立摆的控制,我们借助PID(Proportional-Integral-Derivative)控制器。
PID控制器是一种常用的线性控制系统,其中,比例系数(P)、积分系数(I)和微分系数(D)能够根据系统的需求进行调整。
接下来,我们需要确定系统的控制目标。
倒立摆的目标是使旋转杆的角度保持为0°。
因此,我们需要设计一个控制器,使得当旋转杆角度发生偏差时,控制器能够迅速响应,并产生相应的控制信号。
首先,我们需要获取倒立摆的角度信息。
我们可以通过连接传感器获取角度信息,并将其输入到MATLAB中进行处理。
然后,我们需要设计PID控制器来控制倒立摆。
在MATLAB中,可以使用pid函数来创建PID控制器对象,然后使用tune函数来调整PID控制器对象的参数。
调整PID控制器参数的过程通常可以通过试验和观察实现。
我们可以将倒立摆设置为初始状态,并控制器输出控制信号,然后观察倒立摆的响应。
根据实际观察,我们可以逐步调整PID控制器的参数,以达到系统的稳定性和响应速度的要求。
在完成PID控制器的参数调整后,我们可以进行仿真实验。
在MATLAB中,可以使用sim函数来进行仿真实验。
通过仿真实验,我们可以观察倒立摆的控制效果,并根据需要进行进一步的调整。
通过在MATLAB中进行控制器设计和仿真实验,我们可以对单级倒立摆进行控制系统设计。
该设计可以帮助我们理解控制系统的工作原理,并为实际应用提供参考。
同时,我们还可以根据具体需求对设计进行进一步调整和优化。
毕业设计(论文)任务书I、毕业设计(论文)题目:单级倒立摆LQR控制器的设计及仿真II、毕业设计(论文)使用的原始资料(数据)及设计技术要求:1、在深入了解倒立摆的基础上,熟悉单级倒立摆控制的基本原理2、了解单级倒立摆控制的发展趋势。
3、熟悉线性系统的基本理论和非线性系统线性化的基本方法。
4、建立单级倒立摆的数学模型,并编写MATLAB程序,完成倒立摆的仿真。
I I I、毕业设计(论文)工作内容及完成时间:工作安排如下:1、查阅文献,翻译英文资料,书写开题报告第1---4周2、相关资料的获取和必要知识的学习第5---9周3、设计系统的硬件和软件模块并调试第10--14周4、撰写论文第15--17周5、总结,准备答辩第18周Ⅳ、主要参考资料:1.阳武娇.基于MATLAB的一阶倒立摆控制系统的建模与仿真[J].电子元器件应用.2007,9(1):29-312 .杨世勇,徐莉苹,王培进.单级倒立摆的PID控制研究[J].控制工程.2007,14:23-53.3.黄忠霖.控制系统MATLAB计算及仿真[M].北京:国防工业出版社,2006.4.薛安客,王俊宏.倒立摆控制仿真与实验研究现状[J].杭州电子工业学院学报.2002,21(6):25-27.5 .徐征.基于遗传算法的PID控制器参数寻优方法的研究[D].武汉:武汉大学,2004.6.Takahas M,Narukawa T,Y oshida K.Intelligent transfer andstabilization control to unstable equilibrium point of double inverted pendulum.Int SICE 2003 Annual Co nfeFence,2003,2:1451-145.信息工程系自动化专业类1082022班学生(签名):填写日期: 2014 年 1 月 10 日指导教师(签名):助理指导教师(并指出所负责的部分):信息工程系主任(签名):单级倒立摆LQR控制器的设计及仿真摘要:单级倒立摆系统是一个典型多变量、不稳定和强耦合的非线性系统。
单级倒立摆控制系统设计及simulink仿真摘要:倒立摆系统是一个典型的多变量、非线性、强藕合和快速运动的自然不稳定系统。
因此倒立摆在研究双足机器人直立行走、火箭发射过程的姿态调整和直升机飞行控制领域中有重要的现实意义,相关的科研成果己经应用到航天科技和机器人学等诸多领域。
单级倒立摆系统是一种广泛应用的物理模型。
控制单级倒立摆载体的运动是保证倒立摆稳定性的关键因素。
为了避免常用的物理反馈分析方法和运动轨迹摄像制导控制方法的某些缺点,本文从力学的角度提出对倒立摆的运动进行纯角度制导分析,完成了对倒立摆载体的角度制导运动微分方程的数学建模,设计了该模型的模糊控制系统,并利用 Matlab\simulink软件工具对倒立摆的运动进行了计算机仿真。
实验表明,这种模糊控制配合代数解析方法的运算速度和计算机仿真的效果均较物理反馈制导控制方法有了一定的提高。
该方法可以有效地改善单级倒立摆控制系统的性能。
本论文的主要工作是研究了直线一级倒立摆系统的模糊控制问题,用Matlab和Simulink对一级倒立摆模糊控制系统进行了仿真,验证了设计的可行性。
本文论述了一级倒立摆数学建模方法,推导出他们的微分方程,以及线性化后的状态方程。
讨论了单级倒立摆系统的模糊控制方法和操作步骤。
用Simulink实现了单级倒立摆模糊控制仿真系统,分别给出一级倒立摆系统控制量的响应曲线。
通过仿真说明控制器的有效性和实现性。
关键词:单级倒立摆;仿真;模糊控制;运动;建模;SimulinkDesign of single stage inverted pendulum control systemand Simulink simulationAbstract: inverted pendulum system is unstable system with a typical multi variable, nonlinear, strong coupled and fast motion. So the research on the attitude adjustment of the double foot robot and the attitude adjustment of the rocket launching process and the helicopter flight control field have practical,significance. The related scientific research achievements have been applied to many fields such as aerospace science and robotics. Single inverted pendulum system is a widely used physical model. Controlling the movement of the single inverted pendulum is the key factor to guarantee the stability of the inverted pendulum. In order to avoid some shortcomings of common physical feedback analysis method and motion trajectory camera guidance control method, this paper presents a pure angle guidance analysis on the motionof the inverted pendulum, and designs the fuzzy control system of the model. Experimental results show that the operation speed and computer simulation of this kind of fuzzy control combined with algebraic analysis method are improved by the physical feedback control method. This method can effectively improve the performance of a single stage inverted pendulum control system. In this paper, the main work of this paper is to study the fuzzy control of a linear inverted pendulum system, and the Matlab and Simulink to simulate the fuzzy control system of a single inverted pendulum, verify the feasibility of the design. And a mathematical modeling method of an inverted pendulum is described, their differential equations are derived, and the equation of state is linearized. The fuzzy control method and operation steps of single stage inverted pendulum system are discussed. Using Simulink to realize the fuzzy control simulation system of a single inverted pendulum, the response curve of the control of an inverted pendulum system is given. The effectiveness and the implementation of the controller are illustrated by simulation.Keywords: Inverted pendulum; Simulation; Fuzzy control; Motion; modeling; Simulink 引言倒立摆系统是研究控制理论的一种典型实验装置,具有成本低廉,结构简单,物理参数和结构易于调整的优点,是一个具有高阶次、不稳定、多变量、非线性和强藕合特性的不稳定系统。
单级倒立摆前言自动控制理论是研究自动控制共同规律的技术科学。
它的发展初期,是以反馈理论为基础的自动调节原理,并主要用于工业控制。
控制理论在几十年中,迅速经历了从经典理论到现代理论再到智能控制理论的阶段,并有众多的分支和研究发展方向。
控制理论的发展,起于“经典控制理论”。
早期最有代表性的自动控制系统是18世纪的蒸汽机调速器。
20世纪前,主要集中在温度、压力、液位、转速等控制。
20世纪起,应用围扩大到电压、电流的反馈控制,频率调节,锅炉控制,电机转速控制等。
二战期间,为设计和制造飞机及船用自动驾驶仪、火炮定位系统、雷达跟踪系统及其他基于反馈原理的军用装备,促进了自动控制理论的发展。
至二战结束时,经典控制理论形成以传递函数为基础的理论体系,主要研究单输入-单输出、线性定常系统的分析问题。
经典控制理论的研究对象是线性单输入单输出系统,用常系数微分方程来描述。
它包含利用各种曲线图的频率响应法和利用拉普拉斯变换求解微分方程的时域分析法。
设计目的及意义1)、理论联系实际,加强对自动控制理论的理解。
增强分析问题、解决问题的能力。
2)、熟悉MATLAB软件,掌握它在控制系统设计当中的应用,能熟练进行系统建模、性能分析、模型仿真等操作。
3)、用单片机进行编程,实现PID的控制算法,了解控制算法的具体实现及单片机软件仿真过程。
开发创新意识,增进对科学技术的兴趣,培养严肃认真的科学态度。
1.倒立摆1.1 倒立摆的概念倒立摆是处于倒置不稳定状态,人为控制使其处于动态平衡的一种摆。
如杂技演员顶杆的物理机制可简化为一级倒立摆系统,是一个复杂、多变量、存在严重非线性、非自治不稳定系统。
常见的单级倒立摆系统一般由小车和摆杆两部分构成。
如下图图1-1 单级倒立摆装置1.2研究倒立摆稳定性的意义倒立摆的研究具有重要的工程背景。
从日常生活中所见到的任何重心在上、支点在下的控制问题,到空间飞行器和各类伺服云台的稳定,再到机器人行走。
都和倒立摆系统的稳定控制有很大相似性,故对其稳定控制在实际中有很多应用,如火箭姿态控制、卫星发射架的稳定控制、飞机安全着陆、海上钻井平台的稳定控制等。
2.单级倒立摆的数学模型2.1单级倒立摆的系统描述只要一提小车倒立摆系统,一般均认为其数学模型也已经定型,即对应于直流电机的情况。
事实上,小车倒立摆的数学模型与驱动系统有关,常见到的模型只是对应于直流电机的情况,如果执行机构是交流伺服电机,就不是这个模型了。
本文主要分析由直流电机驱动的小车倒立摆系统。
其特点是高阶次、不稳定、非线性、强耦合,只有采取有效的控制方式才能稳定控制。
图2-1 单级倒立摆系统的原理图图中u是施加于小车的水平方向的作用力,x是小车的位移,θ是摆的倾斜角。
若不给小车施加控制力,倒摆会向左或向右倾斜,控制的目的是当倒摆出现偏角时,在水平方向上给小车以作用力,通过小车的水平运动,使倒摆保持在垂直的位置。
即控制系统的状态参数,以保持摆的倒立稳定。
2.2单级倒立摆系统的数学建模为了建立倒立摆系统的数学模型,先作如下假设:①倒立摆与摆杆均为匀质刚体。
②可忽略摆与载体,载体与外界的摩擦,即忽略摆轴、轮轴、轮与接触面之间的摩擦力等。
2.2.1结构参数这里只考虑二维问题,即认为倒立摆只在图2-1所示平面运动。
控制力u 作用于小车上。
摆杆长度为2L ,质量为m ,小车的质量为M ,小车瞬时位移为x ,摆杆瞬时位置为(x+2L*sinθ),在外力的作用下,系统产生运动。
假设摆杆的重心位于其几何中心。
设输入为作用力u ,输出为摆角θ。
2.2.2系统的运动方程图2-2 小车沿x 轴的受力分析 图2-3 摆的受力分析小车沿x 轴方向的受力分析如图2-2所示,根据牛顿第二定律得xFMx=∑&& (2-1)u H Mx -=&& (2-2)摆的受力分析如图2-3所示,根据牛顿第二定律得 摆杆重心沿x 轴方向运动方程为xFmx=∑&& (2-3)()22sin d x L H mdt θ+= (2-4)摆杆重心沿y 轴方向运动方程为yFmy=∑&& (2-5)()22cos d L V mg mdt θ-= (2-6)摆杆围绕重心转动方程为GG MJ α=∑ (2-7)2sin cos 12mL VL HL θθθ-=&& (2-8)上述方程(2-1)到(2-8)为车载倒立摆系统运动方程组。
因为含有项,所以为非线性微分方程组。
中间变量不易相消。
当θ很小的时候,可对方程线性化.由于控制的目的是保持道理摆稳定, θ很小,可以合理的认为sin θ趋于0,cos θ趋于1,在这些假设条件下,可进行线性化处理有u H Mx -=&& (2-9)H m mL θ=+&&&& (2-10) 0V mg -= (2-11) 212mL VL HL θθ-=&& (2-12)由上述(2-9)到(2-12)方程,消去V 、H 后,有()u m M x mL θ=++&&&& (2-13)21312mL mx mgL θθ+=&&&& (2-14)再消去,得()()1312mL m M L m M g u θθ⎡⎤--+++=⎢⎥⎣⎦&& (2-15)即 ()()1312mL m M L m M g u θθ⎡⎤++-+=-⎢⎥⎣⎦&& (2-16)所以其线性化微分方程为()()221312d mL m M L m M g u dt θθ⎡⎤++-+=-⎢⎥⎣⎦ (2-17)经拉氏变换后,得其传递函数()()()()()211312s G s u s mL m M L s m M g θ-==⎡⎤++-+⎢⎥⎣⎦ (2-18)3. 单级倒立摆控制系统上一章节已经得出单级倒立摆系统的传递函数,但仅仅得出其传递函数是不够的,还需要对其进行校正.3.1基本的PID 校正具有比例—积分—微分控制规律的控制器,称PID 控制器。
当利用PID 控制器进行串联校正时,除可使系统的型别提高一级外,还将提供两个负实零点,从而在提高系统动态性能方面,具有很大的优越性。
因此,在工业过程控制系统中,广泛使用PID 控制器。
PID 控制器各部分参数的选择是根据系统现场调试最后确定。
所有的PID 控制器都有可以分解成给定值控制单元,PID 作用单元及手动/自动转换单元等三个主要单元,如图3-1所示。
图中,给定值单元①接收工业控制过程的测量量c ,以及控制装置的给定值。
PID 作用单元②接受给定值控制单元产生的误差信号e ,并按给定控制律算出闭环控制信号。
手动/自动单元③在“自动A 位置时,将PID 单元的输出信号送入工业过程,此时工业过程在闭环中受到控制;而在“手动M 位置时,把用户直接在控制器上调整手动输出信号送至工业过程,此时系统采用开环控制方式。
图3-1 PID 控制器原理性结构P 、I 、D 三种基本控制规律,各有特点,综合起来其实用PID 控制器的传递函数可以表示为()()()()()111c c F D i M s G s K sT R s C s sT ⎛⎫==++ ⎪-⎝⎭ (3-1)或者表示为()()()()11c c F D i M s G s K sT R s C s sT ⎛⎫==++ ⎪-⎝⎭(3-2)上述两式中的K F 、T i 和T D 是根据工程实际来确定的系数。
而PID 单元的原理电路如图3-2所示图3-2 PID 单元原理电路3.2系统的校正控制设计3.2.1系统的校正所谓校正,就是在系统中加入一些其参数可以根据需要而改变的机构或装置,使系统整个特性发生变化,从而满足给定的各项性能指标。
控制校正系统的目的是使系统动态稳定,即保持倒立摆在垂直的位置,使小车在外力作用下其位移以较小的误差跟随输入的变化。
由于系统的动态响应主要是由它的极点位置决定的,而假如系统是状态完全能控的,即可使系统得到良好的动态性能。
我们在第2.2.2节中已对单级倒立摆系统模型的进行了线性化并推导出了其传递函数。
本设计根据被控对象及技术指标要求采用PID 串联校正。
系统的小车质量为M =2.00kg ,摆的质量为m =0.20kg ,摆长为2L=0.80m ,重力加速度 g=9.8m/s 2,代入公式(2-18)中,得()'2214.643G s s -=- (3-3)系统开环特征方程为224.6430s -=.由特征方程可以看出系统不稳定.根据劳思判据,若想使系统稳定,需加入一个反馈环节()12H s K s K =+,还有一个串联环节()K s .加入反馈和串联环节后,系统的闭环传递函数为()()()()()'0'1K s G s G s G s H s =+()22()4.643K s s H s -=--2212()4.643K s s K s K -=---(3-4)设K(s)=-1,K 1=-3,K 2=-26.5574,则闭环传递函数,即未校正的系统传递函数为()02135G s s s =++ (3-5)由(3-1)和(3-2)可知,PID 校正控制装置的传递函数为()2111i i F C F D i i T s T s K G s K sT sT T s τ⎛⎫++=++=•⎪⎝⎭校正后系统开环传递函数为()()()0c G s G s G s =211135F D i K sT s s sT ⎛⎫=•+ ⎪++⎝⎭221135i i F i T s T K s s T s τ++=••++ (3-6)则系统的闭环传递函数为()()()1G s s G s φ=+()()()232135F i i i F i F i FK T s T s T s K T s K T s K ττ++=+++++ (3-7)3.2.2利用MATLAB 的系统仿真进入MATLAB 的工作环境之后,通过键盘输入MATLAB 命令,便可以执行相应的操作。
例如,通过下面的MATLAB 程序即可获得G (s)的单位阶跃响应及极零点分布。
>> s=tf('s')Transfer function: s>> sys=tf(-1,[1 0 29.6964]) Transfer function: -1 ---------- s^2 + 26.557 >> step(sys) >> pzmap(sys)图3-3G (s)的单位阶跃响应及极零点分布本实验采用MATLAB 软件进行仿真实验,进一步验证了PID 控制器中各个参数对系统的稳定性和动态性能的影响,在大量的仿真结果中进行比较和挑选,同时根据调节时间<3s 的设计要求,最后确定PID 控制器的各参数分别为:微分时间系数=1,积分时间系数T=1,比例系数 K=20。