开关磁阻电机工作原理及其驱动系统
- 格式:doc
- 大小:460.00 KB
- 文档页数:10
开关磁阻电机开关磁阻电机是一种新型调速电机,调速系统兼具直流、交流两类调速系统的优点,是继变频调速系统、无刷直流电动机调速系统的最新一代无极调速系统。
它的构造简单稳固,调速范围宽,调速性能优异,且在整个调速范围内都具有较高效率,系统可靠性高。
主要由开关磁阻电机、功率变换器、控制器与位置检测器四部分组成。
控制器内包含控制电路与功率变换器,而转子位置检测器那么安装在电机的一端。
其电机部分由于是运用了磁阻最小原理,故称为磁阻电动机,又由于线圈电流通断、磁通状态直承受开关控制,故称为开关磁阻电动机。
特征开关磁阻电机构造简单,性能优越,可靠性高,覆盖功率范围10W~5MW的各种上下速驱动调速系统。
使的开关磁阻电机存在许多潜在的领域,在各种需要调速和高效率的场合均能得到广泛使用〔电动车驱动、通用工业、家用电器、纺织机械、电力传动系统等各个领域〕。
优点◆其构造简单,价格廉价,电机的转子没有绕组和磁铁。
◆电机转子无永磁体,允许较高的温升。
由于绕组均在定子上,电机容易冷却。
效率高,损耗小。
◆转矩方向与电流方向无关,只需单方相绕组电流,每相一个功率开关,功率电路简单可靠。
◆转子上没有电刷构造稳固,适用于高速驱动。
◆转子的转动惯量小,有较高转矩惯量比。
◆调速范围宽,控制灵敏,易于实现各种再生制动才能。
◆并具频繁启动〔1000次/小时〕,正向反向运转的特殊场合使用。
◆且启动电流小,启动转矩大,低速时更为突出。
◆电机的绕组电流方向为单方向,电力控制电路简单,具有较高的经济性和可靠性。
◆可通过机和电的统一协调设计满足各种特殊使用要求。
缺点其工作原理决定了,假设需要开关磁阻电机运行稳定可靠,必须使电机与控制配合的很好。
因其要使用位置传感器,增加了构造复杂性,降低了可靠性。
对于电机本身而言,转矩脉动大是其固有的缺点;在电机远离设计点的时候,转矩脉动大会表达的更加明显。
假设单纯使用电流斩波或最优导通角控制方法,对其转矩脉动的改善不是很大,需要参加更加复杂的算法。
开关磁阻电机的定、转子的凸极均由普通硅钢片叠压而成,这种加工工艺可尽可能地减小电机的涡流及磁滞损耗。
转子极上既没有绕组也没有永磁体,更没有换向器、滑环等,定子极上绕有集中绕组,径向相对的两个绕组串联构成一相,电机整体结构简单。
开关磁阻电机是利用转子磁阻不均匀而产生转矩的电机,又称反应式同步电动机,其结构及工作原理与传统的交、直流电动机有很大的区别。
它不依靠定、转子绕组电流所产生磁场的相互作用而产生转矩,而是依靠“磁阻最小原理”产生转矩,即:“磁通总是沿着磁阻最小的路径闭合,从而产生磁拉力,进而形成磁阻性质的电磁转矩”和“磁力线具有力图缩短磁通路径以减小磁阻和增大磁导的本性”。
开关磁阻电机的磁阻随着转子凸极与定子凸极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子凸极和定子凸极中心线对准时,相绕组电感最大,磁阻最小,当转子凹槽和定子凸极中心线对准时,相绕组电感最小,磁阻最大。

半导体器件应用网
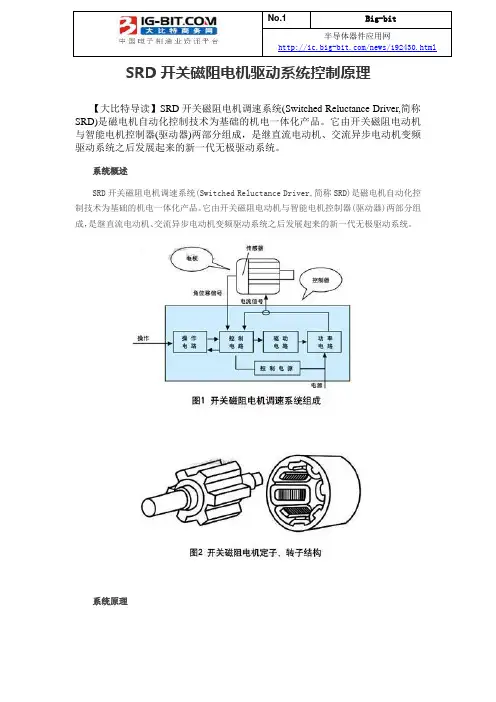
/news/192430.html SRD开关磁阻电机驱动系统控制原理【大比特导读】SRD开关磁阻电机调速系统(Switched Reluctance Driver,简称SRD)是磁电机自动化控制技术为基础的机电一体化产品。
它由开关磁阻电动机
与智能电机控制器(驱动器)两部分组成,是继直流电动机、交流异步电动机变频
驱动系统之后发展起来的新一代无极驱动系统。
系统概述
SRD开关磁阻电机调速系统(Switched Reluctance Driver,简称SRD)是磁电机自动化控
制技术为基础的机电一体化产品。
它由开关磁阻电动机与智能电机控制器(驱动器)两部分组成,是继直流电动机、交流异步电动机变频驱动系统之后发展起来的新一代无极驱动系统。
系统原理
半导体器件应用网
SRD开关磁阻电机驱动系统控制原理(如图1所示)。
电机内安装有位置传感器,控制器由功率电路和控制电路等单元组成。
工作状态下(如图3所示),通过控制相绕组的电子开关S1、S2的工作状态,就可以改变电机的转向、转矩、转速、制动等工作状态。
工作时磁场示意图(如图4所示)
电机结构
SRD电机是定子、转子双凸极可变磁阻电机,定子、转子均由高性能冷轧硅钢片叠压而成,转子上既无绕组也无永磁体,定子极上绕有中绕组,如图2所示。

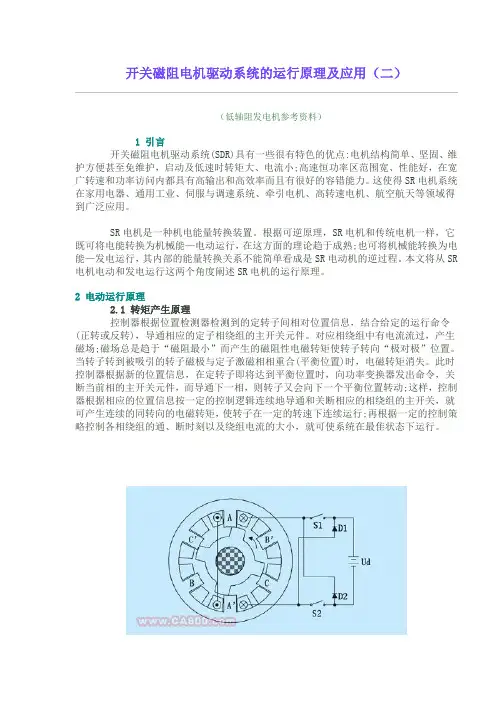
开关磁阻电机驱动系统的运行原理及应用(二)?(低轴阻发电机参考资料)??????1 引言开关磁阻电机驱动系统(SDR)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,启动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率访问内都具有高输出和高效率而且有很好的容错能力。
这使得SR电机系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。
SR电机是一种机电能量转换装置。
根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能—电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能—发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。
本文将从SR电机电动和发电运行这两个角度阐述SR电机的运行原理。
2 电动运行原理2.1 转矩产生原理控制器根据位置检测器检测到的定转子间相对位置信息,结合给定的运行命令(正转或反转),导通相应的定子相绕组的主开关元件。
对应相绕组中有电流流过,产生磁场;磁场总是趋于“磁阻最小”而产生的磁阻性电磁转矩使转子转向“极对极”位置。
当转子转到被吸引的转子磁极与定子激磁相相重合(平衡位置)时,电磁转矩消失。
此时控制器根据新的位置信息,在定转子即将达到平衡位置时,向功率变换器发出命令,关断当前相的主开关元件,而导通下一相,则转子又会向下一个平衡位置转动;这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的同转向的电磁转矩,使转子在一定的转速下连续运行;再根据一定的控制策略控制各相绕组的通、断时刻以及绕组电流的大小,就可使系统在最隹状态下运行。
图1 三相sr电动机剖面图从上面的分析可见,电流的方向对转矩没有任何影响,电动机的转向与电流方向无关,而仅取决于相绕组的通电顺序。
若通电顺序改变,则电机的转向也发生改变。
为保证电机能连续地旋转,位置检测器要能及时给出定转子极间相对位置,使控制器能及时和准确地控制定子各相绕组的通断,使srm能产生所要求的转矩和转速,达到预计的性能要求。
开关磁阻电机工作原理开关磁阻电机是一种新型的电机,它采用了开关磁阻原理,具有结构简单、效率高、噪音低等优点,因此在工业生产中得到了广泛的应用。
那么,开关磁阻电机是如何工作的呢?接下来,我们将深入探讨开关磁阻电机的工作原理。
首先,我们需要了解开关磁阻原理。
开关磁阻原理是指通过改变磁路的磁阻来控制电机的运动。
在开关磁阻电机中,磁路由磁铁、磁导体和空气间隙组成。
通过改变磁导体的导磁性能,可以改变磁路的磁阻,从而控制电机的运动。
这种原理使得开关磁阻电机具有了结构简单、响应速度快的特点。
其次,开关磁阻电机的工作原理是基于磁阻变化来实现的。
当电流通过磁导体时,磁导体的导磁性能会发生变化,从而改变磁路的磁阻。
通过控制电流的大小和方向,可以实现对磁路磁阻的精确控制。
当磁路的磁阻发生变化时,磁场的分布也会发生变化,从而产生了磁力,推动电机的转子运动。
在开关磁阻电机中,通常会采用开关元件来控制电流的大小和方向。
通过控制开关元件的通断,可以实现对电流的精确控制,从而实现对磁路磁阻的精确控制。
这种精确控制使得开关磁阻电机具有了高效率、高精度的特点。
此外,开关磁阻电机还具有了响应速度快、噪音低的特点。
由于开关磁阻电机采用了数字化控制,可以实现对电流的快速调节,从而实现了响应速度快的特点。
同时,由于开关磁阻电机不需要传统的机械换向装置,因此噪音也大大降低了。
综上所述,开关磁阻电机是一种利用开关磁阻原理实现运动控制的新型电机。
它具有了结构简单、效率高、响应速度快、噪音低的特点,因此在工业生产中得到了广泛的应用。
希望通过本文的介绍,能够让大家对开关磁阻电机的工作原理有一个更加深入的了解。
开关磁阻电机工作原理及其驱动系统首先,让我们来了解开关磁阻电机的原理。
它由一组互相串联的磁电阻元件组成,安装在定子上。
这些磁电阻元件是由永磁材料制成的,具有高磁导率。
当电流通过磁阻元件时,它们变为“ON”状态,并形成低磁阻通路,允许磁通通过。
当电流终止时,它们恢复为“OFF”状态,形成高磁阻通路,磁通不再通过。
这种可逆性允许电机在电流方向改变时,磁通的方向也随之改变,从而实现了转子的转动。
1.电源:为电机提供所需的电能。
通常使用直流电源来驱动开关磁阻电机,但也可以使用交流电源。
2.驱动电路:将电源提供的直流电转换为适合电机工作的电流和电压。
驱动电路通常由功率放大器和控制电路组成。
功率放大器用于放大驱动电流,以控制磁阻元件的磁化状态。
控制电路用于监测电机的运行状态,并根据需要调整驱动信号。
3.控制电路:根据用户的指令或外部传感器的反馈信号,控制电机的运行速度和转向。
控制电路根据需要向驱动电路发送控制信号,以改变驱动电流的大小和方向。
开关磁阻电机的驱动系统通过控制磁化状态来改变磁通,从而控制电机的转动。
当需要驱动电机时,控制电路向驱动电路发送启动信号,驱动电路放大信号并向磁阻元件提供足够的电流,使其进入“ON”状态。
这时,磁通开始通过,产生转矩,驱动转子开始转动。
当需要改变电机的转向时,控制电路改变驱动电流的方向,使磁通方向相应改变。
需要注意的是,开关磁阻电机的驱动系统需要根据具体的电机参数和工作要求进行设计和调整,以实现最佳的性能和效率。
驱动系统应能提供足够的功率和精确的控制,以满足电机的转矩和速度需求,并确保电机的稳定运行。
综上所述,开关磁阻电机的工作原理基于磁阻效应,并由驱动系统控制。
驱动系统由电源、驱动电路和控制电路组成,通过改变磁化状态来改变磁通,从而驱动电机的转动。
这种电机具有结构简单、转速范围广、效率高等特点,适用于许多工业应用领域。

开关磁阻电机驱动系统的运行原理及应用(二)(低轴阻发电机参考资料)1 引言开关磁阻电机驱动系统(SDR)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,启动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率访问内都具有高输出和高效率而且有很好的容错能力。
这使得SR电机系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。
SR电机是一种机电能量转换装置。
根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能—电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能—发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。
本文将从SR 电机电动和发电运行这两个角度阐述SR电机的运行原理。
2 电动运行原理2.1 转矩产生原理控制器根据位置检测器检测到的定转子间相对位置信息,结合给定的运行命令(正转或反转),导通相应的定子相绕组的主开关元件。
对应相绕组中有电流流过,产生磁场;磁场总是趋于“磁阻最小”而产生的磁阻性电磁转矩使转子转向“极对极”位置。
当转子转到被吸引的转子磁极与定子激磁相相重合(平衡位置)时,电磁转矩消失。
此时控制器根据新的位置信息,在定转子即将达到平衡位置时,向功率变换器发出命令,关断当前相的主开关元件,而导通下一相,则转子又会向下一个平衡位置转动;这样,控制器根据相应的位置信息按一定的控制逻辑连续地导通和关断相应的相绕组的主开关,就可产生连续的同转向的电磁转矩,使转子在一定的转速下连续运行;再根据一定的控制策略控制各相绕组的通、断时刻以及绕组电流的大小,就可使系统在最隹状态下运行。
图1 三相sr电动机剖面图从上面的分析可见,电流的方向对转矩没有任何影响,电动机的转向与电流方向无关,而仅取决于相绕组的通电顺序。
若通电顺序改变,则电机的转向也发生改变。
为保证电机能连续地旋转,位置检测器要能及时给出定转子极间相对位置,使控制器能及时和准确地控制定子各相绕组的通断,使srm能产生所要求的转矩和转速,达到预计的性能要求。
开关磁阻电机的原理及其控制系统开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。
具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。
一、开关磁阻电机的工作原理开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。
因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。
所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。
开关磁阻电机的定子和转子都是凸极式齿槽结构。
定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2是二极管,是直流电源。
电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。
电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。
当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。
通过气隙的磁力线是弯曲的,此时磁路的磁导小于定、转子磁极轴线重合时的磁导,因此,转子将受到气隙中弯曲磁力线的切向磁拉力产生的转矩的作用,使转子逆时针方向转动,转子磁极的轴线O1向定子A相磁极轴线OA趋近。
当OA和O1轴线重合时,转子己达到平衡位置,即当A相定、转子极对极时,切向磁拉力消失。
开关磁阻电机驱动系统的运行原理及应用1.简介:开关磁阻电机由驱动器和电机两部分组成,其中驱动器根据外部输入源的指令向电机提供电流,而电机则将电流转化为转动力。
2.驱动电流:驱动器根据输入源的指令产生开关电流,该电流可以通过改变驱动器中的电流方向和大小来实现。
在每一个电机相中都有一个电流传感器,用于测量电流。
驱动器会根据这些测量结果,进行控制电机的电流。
3.磁化和消磁:当电流通过电机线圈时,它会产生磁场,从而使定子上的磁阻磁化。
然后,电流将被改变方向,导致磁阻逆磁化。
这个过程会不断重复。
4.转动力产生:由于磁阻的磁化和逆磁化,定子上的转子被吸引和排斥。
这个过程会持续下去,从而使电机转动。
1.工业机械:开关磁阻电机驱动系统可以应用于各种工业机械中,如机床、印刷机、绘图仪和工业机器人等。
它们能够提供高速、高力矩和高精度的转动控制,提高生产效率和产品质量。
2.汽车工业:开关磁阻电机驱动系统可以应用于汽车的多种部件中,如电动方向盘、电动驱动系统和汽车座椅调节器等。
它们能够提供精确的转动控制,提高汽车的舒适性和操纵性。
3.医疗设备:开关磁阻电机驱动系统可以应用于医疗设备,如手术机械、医疗床和医疗影像设备等。
它们能够提供平稳的转动和精确的位置控制,提高医疗设备的性能和安全性。
4.家用电器:开关磁阻电机驱动系统可以应用于家用电器,如洗衣机、空调和冰箱等。
它们能够提供高效的转动和低噪音的操作,提高家用电器的使用体验和节能效果。
总结:开关磁阻电机驱动系统通过开关磁阻电机的独特运动原理,提供高效、高速和高精度的电机控制。
它已经在各个领域得到广泛应用,并为相关行业的发展和进步做出了重要贡献。
未来,随着科学技术的不断进步,开关磁阻电机驱动系统有望进一步发展和创新,为人类社会的发展做出更大的贡献。
开关磁阻电机的原理及其控制系统开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。
具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。
一、开关磁阻电机的工作原理开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。
因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。
所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。
开关磁阻电机的定子和转子都是凸极式齿槽结构。
定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2是二极管,是直流电源。
电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。
电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。
当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A 相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。
通过气隙的磁力线是弯曲的,此时磁路的磁导小于定、转子磁极轴线重合时的磁导,因此,转子将受到气隙中弯曲磁力线的切向磁拉力产生的转矩的作用,使转子逆时针方向转动,转子磁极的轴线O1向定子A相磁极轴线OA趋近。
当OA和O1轴线重合时,转子己达到平衡位置,即当A相定、转子极对极时,切向磁拉力消失。
开关磁阻电动机:神奇的电动机原理及应用开关磁阻电动机是一种新颖的电动机,其运行原理相对于普通电动机有所不同。
本文将为大家深入解析开关磁阻电动机的工作原理、应用以及优缺点。
一、开关磁阻电动机的工作原理
开关磁阻电动机主要由转子和定子两部分组成,其中定子上的绕组通过外部电源源源不断地向上浮动或向下倾斜,使得通过绕组的电流发生周期性变化,从而引起转子的磁极进行拟合。
在转子的磁极转向过程中,绕组会因电流变化导致磁通方向的突变,进而发生磁阻变化现象,使得磁通线在定子和转子之间相互拉扯、压缩。
当电流变化方向突然发生变化,磁通线将瞬时穿透转子并产生一定的转矩,这就使得转子得以转动。
此时,转子上的永磁体以及定子上的开关磁阻吸合一起,阻止了绕组内部电流的继续变化,磁阻的变动也暂时停止了。
二、开关磁阻电动机的应用
开关磁阻电动机具有启动时转矩大、低速高扭矩运行、免维护等优点,因此在需要高负载启动的直流驱动系统中广泛应用。
同时,由于开关磁阻电动机在运行过程中不需要电动机控制器对磁通进行转换,因此可以降低系统成本和运行维护费用。
三、开关磁阻电动机的优缺点
1.优点:开关磁阻电动机具有起动时转矩大、性能稳定、免维护、运行频率高等特点。
在低转速下,开关磁阻电动机的扭矩相对较大。
2.缺点:开关磁阻电动机的设计需要较高的技术要求,同时其性能会受到外界电磁干扰的影响;开关磁阻电动机的调速性能相对较差,调速精度难以达到高级别的要求。
综上所述,开关磁阻电动机具有独特的工作原理和优势特点,在一些特定应用场合中具有广泛的应用前景。
开关磁阻电机的原理及其控制系统1.工作原理:开关磁阻电机是一种以磁阻为主要工作原理的电机。
它利用电流在磁阻元件中产生的磁阻变化,从而实现驱动电机转动。
该电机主要由定子和转子两部分组成。
定子中心构造有磁阻元件(如磁阻电阻块或磁阻隐藏产生器),制造磁场,而转子是磁场作用下的动力元件。
电机通过改变定子和转子之间的磁阻关系来实现转矩调速。
工作过程如下:(1)当电机通电时,定子中的磁场会激励转子周围的物质,并产生磁阻。
(2)通过改变通电线圈的电流方向,可以改变磁场中的磁阻分布和大小。
(3)转子在磁场影响下,会发生转动,转动角度和方向与磁阻的变化有关。
(4)控制系统通过改变电流的大小和方向,以调节磁场中的磁阻,从而控制电机的转速和转矩。
2.控制系统:(1)电源供应:控制系统需要提供稳定的电源供应,以保证电机正常工作。
可以采用直流电源或交流电源供电,根据实际要求进行选择。
(2)电流控制:电流控制是开关磁阻电机的关键。
通过改变电流的大小和方向,可以实现对电机的转速和转矩的调节。
可以采用PID控制算法等来实现电流的闭环控制。
(3)角度控制:角度控制是实现电机转动角度的控制手段。
可以通过位置传感器等装置来检测电机转子的位置,然后通过控制系统来调整电流方向和大小,从而实现电机转子在指定角度上停留或转动。
(4)速度控制:速度控制是根据实际需求来调节电机转速的手段。
可以通过改变电流的大小和方向,或者改变供电频率等方式来实现速度的调节。
总结:开关磁阻电机是一种利用磁阻变化实现驱动的电机,通过改变电流的大小和方向,可以实现对电机的转速和转矩的调节。
其控制系统主要包括电源供应、电流控制、角度控制和速度控制等部分。
利用这些控制手段,可以实现对开关磁阻电机的精确控制,满足各种实际应用需求。
开关磁阻电机的原理及其控制系统开关磁阻电机80年代初随着电力电子、微电脑和控制理论的迅速发展而发展起来的一种新型调速驱动系统。
具有结构简单、运行可靠、成本低、效率高等突出优点,目前已成为交流电机调速系统、直流电机调速系统、无刷直流电机调速系统的强有力的竞争者。
一、开关磁阻电机的工作原理开关磁阻电机的工作原理遵循磁磁阻最小原理,即磁通总是要沿着磁阻最小路径闭合。
因此,它的结构原则是转子旋转时磁路的磁阻要有尽可能大的变化。
所以开关磁阻电动机采用凸极定子和凸极转子的双凸极结构,并且定转子极数不同。
开关磁阻电机的定子和转子都是凸极式齿槽结构。
定、转子铁芯均由硅钢片冲成一定形状的齿槽,然后叠压而成,其定、转子冲片的结构如图1所示。
图1:开关磁阻电机定、转子结构图图1所示为12/8极三相开关磁阻电动机,S1. S2是电子开关,VD1, VD2是二极管,是直流电源。
电机定子和转子呈凸极形状,极数互不相等,转子由叠片构成,定子绕组可根据需要采用串联、并联或串并联结合的形式在相应的极上得到径向磁场,转子带有位置检测器以提供转子位置信号,使定子绕组按一定的顺序通断,保持电机的连续运行。
电机磁阻随着转子磁极与定子磁极的中心线对准或错开而变化,因为电感与磁阻成反比,当转子磁极在定子磁极中心线位置时,相绕组电感最大,当转子极间中心线对准定子磁极中心线时,相绕组电感最小。
当定子A相磁极轴线OA与转子磁极轴线O1不重合时,开关S1, S2合上,A相绕组通电,电动机内建立起以OA为轴线的径向磁场,磁通通过定子扼、定子极、气隙、转子极、转子扼等处闭合。
通过气隙的磁力线是弯曲的,此时磁路的磁导小于定、转子磁极轴线重合时的磁导,因此,转子将受到气隙中弯曲磁力线的切向磁拉力产生的转矩的作用,使转子逆时针方向转动,转子磁极的轴线O1向定子A相磁极轴线OA趋近。
当OA和O1轴线重合时,转子己达到平衡位置,即当A相定、转子极对极时,切向磁拉力消失。
开关磁阻电机工作原理
开关磁阻电机是一种利用磁阻效应来实现电机转动的新型电机,它具有结构简单、体积小、效率高等优点,因而在各种应用场景中得到了广泛的应用。
那么,开关磁阻电机是如何实现工作的呢?接下来,我们将详细介绍开关磁阻电机的工作原理。
首先,开关磁阻电机的核心部件是磁阻转子。
磁阻转子由多个磁性材料组成,
这些材料在不同的磁场作用下具有不同的磁导率。
当外加电流通过定子线圈时,产生的磁场会使磁阻转子中的磁性材料受到磁力的作用,从而使磁阻转子发生旋转运动。
这种旋转运动可以用来驱动机械装置,实现各种工作任务。
其次,开关磁阻电机的工作原理涉及到磁阻效应。
磁阻效应是指在外部磁场的
作用下,磁性材料的磁导率发生变化的现象。
在开关磁阻电机中,通过改变定子线圈中的电流方向,可以改变磁阻转子中磁性材料的磁导率,从而控制磁阻转子的旋转运动。
这种通过改变电流方向来控制磁阻转子旋转的方法,被称为磁阻效应驱动。
最后,开关磁阻电机的工作原理还涉及到电子控制系统。
电子控制系统通过对
定子线圈中的电流进行精确控制,可以实现对磁阻转子旋转运动的精确控制。
同时,电子控制系统还可以实现对开关磁阻电机的启动、制动、速度调节等功能,从而满足不同工作场景对电机性能的要求。
综上所述,开关磁阻电机通过利用磁阻效应和电子控制系统,实现了高效、精
确的电机转动,具有结构简单、体积小、效率高等优点。
在各种应用场景中,开关磁阻电机都发挥着重要的作用,为各种工程和生产提供了可靠的动力支持。
希望通过本文的介绍,读者对开关磁阻电机的工作原理有了更深入的了解。
开关磁阻电机工作原理及其驱动系统
开关磁阻电机
Switched Reluctance Drivesystem, SRD
开关磁阻电机驱动系统(Switched Reluctance Drive system, SRD)具有一些很有特色的优点:电机结构简单、坚固、维护方便甚至免维护,起动及低速时转矩大、电流小;高速恒功率区范围宽、性能好,在宽广转速和功率范围内都具有高输出和高效率而且有很好的容错能力。
这使得SR电机驱动系统在家用电器、通用工业、伺服与调速系统、牵引电机、高转速电机、航空航天等领域得到广泛应用。
SR电机是一种机电能量转换装置。
根据可逆原理,SR电机和传统电机一样,它既可将电能转换为机械能——电动运行,在这方面的理论趋于成熟;也可将机械能转换为电能——发电运行,其内部的能量转换关系不能简单看成是SR电动机的逆过程。
开关磁阻电机的发展概况和发展趋势
“开关磁阻电机(Switched reluctance motor)”一词源见于美国学者
S.A.Nasarl969年所撰论文,它描述了这种电机的两个基本特征:①开关性——电机必须工作在一种连续的开关模式,这是为什么在各种新型功率半导体器件可以获得后这种电机才得以发展的主要原因;②磁阻性——它是真正的磁阻电机,定、转子具有可变磁阻磁路,更确切地说,是一种双凸极电机。
开关磁阻电机的概念实际非常久远,可以追溯到19世纪称为“电磁发动机”的发明,这也是现代步进电机的先驱。
在美国,这种电机常常被称为“可变磁阻电机(variable reluctance motor, VR电机)”一词, 但是VR电机也是步进电机的一种形式,容易引起混淆。
有时人们也用“无刷磁阻电机(Brushless reluctance motor)”一词,以强调这种电机的无刷性。
“电子换向磁阻电机(Electronically commutated reluctance motor)”一词也曾采用,从工作原理来看,甚至比“开关磁阻”的说法更准确—些,但也容易与电子换向的水磁直流电机相混淆。
毫无疑问,正是由于英国 P.J.Lawrenson教授及其同事们的杰出贡献,赋予了现代SR电机新的意义,开关磁阻电机一词也因此逐渐为人们所接受和采用。
从电机结构和运行原理上看,SR电机与大步距角的反应式步进电机十分相似,因此有人将SR电机看成是一种高速大步距角的步进电机。
但事实上,两者是有本质差别的,这种差别体现在电机设计、控制方法、性能特性和应用场合等方面,见表11-1。
开关磁阻电机也可视为一种反应式同步磁阻电机,但它与常规的反应式同步磁阻电机有许多个同之处,见表11-2
1.1开关磁阻电机驱动系统的组成
开关磁阻电机驱动系统(SRD)主要由开关磁阻电机、功率变换器、控制器和检测器四部分组成,如图1-1所示。
1.1.1开关磁阻电机
SR电机可以设计成单相、两相、三相、四相及多相等不同相数结构,且有每极单齿结构和每极多齿结构,轴向气隙、径向气隙和轴向—径向混合气隙结构,内转子和外转子结构,低于三相的SR电机一般没有自起动能力。
相数多,有利于减小转矩波动,但导致结构复杂、主开关器件多、成本增高。
目前应用较多的是二相6/4极结构和四相8/6极结构。
下表为常见SR电机定、转子极数组
合方案。
三相开关磁阻电机
1.1.2控制器和位量检测器
控制器综合处理位置检测器、电流检测器提供的电机转子位置、速度和电流等反馈信息及外部输人的指令,实现SR电机运行状态的控制,是SRD的指挥中枢。
控制器一般由单片机及外围接口电路等组成。
在SRD中,要求控制器具有下述性能:
(1)电流斩波控制;
(2)角度位置控制;
(3)起动、制动、停车及四象限运行;
(4)速度调节。
位置传感器向控制器提供转子位置及速度等信号,使控制器能正确地决定绕组的导通和关断时刻。
通常采用光电器件、霍耳元件或电磁线圈法进行位置检测,采用无位置传感器的位置检测方法是SRD的发展方向,对降低系统成本、提高系统可靠性有重要的意义。
1.2开关磁阻电机的工作原理
开关磁阻电机的转矩是磁阻性质,其运行原理遵循“磁阻最小原理”——磁通总是要沿磁阻最小的路径闭合,因磁场扭曲而产生切向磁拉力,如下图所示,具体过程如下:
当A相绕组电流控制开关S1、S2闭合时,A相励磁,所产生的磁场力图使转子旋转到转子极轴线aa'与定子极轴线AA'的重合位置,从而产生磁阻性质的电磁转矩。
顺序给A—B—C—D相绕组通电(B、C、D各相绕组在图中未画出),则转子便按逆时针方向连续转动起来;反之,依次给D—C—B—A相绕组通电,则转子会沿顺时针方向转动。
在多相电机实际运行中,也常出现两相或两相以上绕组同时导通的情况。
当q相定子绕组轮流通电一次,转子转过一个转子极距。
设每相绕组开关频率(主开关开关频率)为f Ph,转子极数为N r则SR电机的同步转速(r/min)可表示为
由于是磁阻性质的电磁转矩,SR电机的转向与相绕组的电流方向无关,仅取决于相绕组通电的顺序.这使得能够充分简化功率变换器电路。
当主开关S1、S2接通时,A相绕组从直流电源U吸收电能,而当S1、S2断开时,绕组电流通过续流二极管VD1、VD2将剩余能量回馈给电源U。
因此,SR电机具有能量回馈的特点,系统效率高。
对SRD的理论研究和实践证明,该系统具有明显的特点:
(1)电机结构简单、坚固,制造工艺简单。
成本低,转子仅由硅钢片叠压而成,可工作于极高转速;定子线圈为集中绕组,嵌放容易,端部短而牢固,工作可靠,能适用于各种恶劣、高温其至强振动环境。
(2)损耗主要产生在定子,电机易于冷却;转子无永磁体,允许有较高的温升。
(3)转矩方向与相电流方向无关,从而可减少功率变换器的开关器件数,降低系统成本。
(4)功率变换器不会出现直通故障,可靠性高。
(5)起动转矩大,低速性能好,无异步电动机在起动时所出现的冲击电流现象。
(6)调速范围宽,控制灵活,易于实现各种待殊要求的转矩——速度特性。
(7)在宽广的转速和功率范围内都具有高效率。
(8)能四象限运行,具有较强的再生制动能力。
相数
Single-Phase Motor
These are the simplest SR motors with fewestconnections between machine and electronics. The disadvantages lie in very hightorque ripple and inability to start at all angular positions. Maybe attractivefor very high speed applications, but starting problems may preclude their use. Two-Phase Motor
Problems of starting compared with single phasemachines can be overcome by stepping the air-gap, or providing asymmetry in therotor poles. This machine may be of interest where the cost of windingconnections is important, but again high torque ripple may be detrimental.
Three-Phase Motor
Offers simplest solution to starting and torqueripple without resorting to high numbers of phases. Hence has been the mostpopular topology in its 6/4 form. Alternative 3-phase machines with doubled-uppole numbers can offer a better solution for lower speed applications. Butagain watch-out
for torque ripple especially in the voltage controlsingle-pulse operating mode.
Four-Phase Motor
Maybe popular for reducing torque ripplefurther, but the large number of power devices and connections will probablylimit four phase to a limited application field. Five- and six-phase motors canoffer better torque ripple reduction compared with four-phase and three-phase.。