最优化方法4-1第四章 约束最优化方法-KKT条件
- 格式:ppt
- 大小:1.96 MB
- 文档页数:37
KKT条件的推导
KKT条件第⼀项是说最优点必须满⾜所有等式及不等式限制条件,也就是说最优点必须是⼀个可⾏解,这⼀点⾃然是⽏庸置疑的。
第⼆项表明在最优点,必须是和的线性组合,和都叫做拉格朗⽇乘⼦。
所不同的是不等式限制条件有⽅向性,所以每⼀个都必须⼤于或等于零,⽽等式限制条件没有⽅向性,所以没有符号的限制,其符号要视等式限制条件的写法⽽定。
我们把这个⽬标函数称为原函数构造该函数的对偶函数如下:
假设是原函数的⼀个可⾏点(满⾜原函数的约束),是对偶函数的⼀个可⾏点,因为,所以;同理。
因此,我们有,对于任意的满⾜原函数约束的和满⾜对偶函数约束的有:
记为原函数的⼀个最优点,最优值为;为对偶函数的⼀个最优点,最优值为。
我们有:
(weak duality)
如果能够使得成⽴,则称strong duality成⽴,即
现在假设strong duality能够成⽴,并且假设是原函数的最优解,为对偶函数的⼀个最优点,那么
第⼀个等式是strong duality,第⼆⾏等式是对偶函数的定义,第三⾏不等式是inf的定
义,第四⾏不等式是因为。
因此,我们有因为对每个,所以有
(Complementary slackness)
因为是使得最⼩的点,(注意上⾯的第三⾏等式成⽴)所以关于的导数在处为0,即:
综上所述我们得到了的条件:。
matlab kkt 条件KKT条件是线性规划和非线性规划中常用的一种优化方法,可以用于求解约束最优化问题。
KKT条件的全称是Karush-Kuhn-Tucker条件,它是由苏联数学家Karush和美国数学家Kuhn和Tucker共同提出的。
KKT条件在优化问题中起到了至关重要的作用。
本文将详细介绍KKT条件的相关知识和应用。
KKT条件是一组必要条件,用于判断在给定约束条件下的极值点是否满足最优性条件。
它包括了两个方面的条件,一是对于无约束极值点的条件,二是对于有约束极值点的条件。
KKT条件的核心思想是通过引入拉格朗日乘子来将约束问题转化为无约束问题,从而求解最优解。
在介绍KKT条件之前,首先需要了解拉格朗日乘子法。
拉格朗日乘子法是一种求解约束最优化问题的常用方法,它将约束最优化问题转化为一个无约束极值问题。
具体来说,对于一个带有约束条件的优化问题,我们可以构建一个拉格朗日函数,然后通过求解该函数的极值点来求解原始问题。
拉格朗日乘子法的基本思想是在原始问题的目标函数中引入一个或多个拉格朗日乘子,通过对拉格朗日函数求偏导数,并令其为零,从而求解最优解。
KKT条件是拉格朗日乘子法在约束最优化问题上的推广和应用。
对于一个约束最优化问题,我们可以通过引入拉格朗日乘子来构建拉格朗日函数,然后利用KKT条件来求解最优解。
KKT条件包括了两个方面的条件,一是对于无约束极值点的条件,二是对于有约束极值点的条件。
对于无约束极值点,KKT条件要求目标函数的梯度为零;对于有约束极值点,KKT条件要求目标函数的梯度与约束条件的梯度线性相关,并且满足一定的互补条件。
KKT条件的应用非常广泛,特别是在经济学、工程学和管理学等领域。
在经济学中,KKT条件被广泛应用于市场均衡和最优资源配置等问题的研究中;在工程学中,KKT条件被广泛应用于优化设计、控制系统和信号处理等问题的求解中;在管理学中,KKT条件被广泛应用于决策分析和风险管理等问题的研究中。

Karush-Kuhn-Tucker最优化条件(KKT条件)
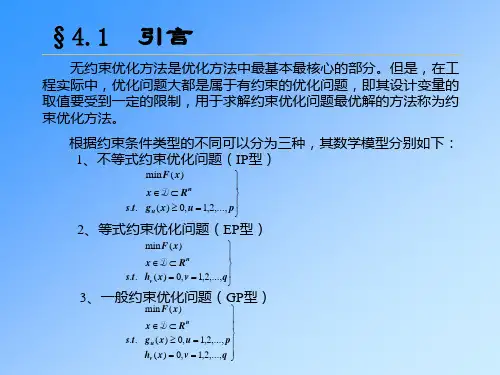
一般地,一个最优化数学模型能够表示成下列标准形式:
所谓 Karush-Kuhn-Tucker 最优化条件,就是指上式的最小点x*必须满足下面的条件:
KKT最优化条件是Karush[1939]以及Kuhn和Tucker[1951]先后独立发表出來的。
这组最优化条件在Kuhn和Tucker 发表之后才逐渐受到重视,因此许多书只记载成「Kuhn-Tucker 最优化条件 (Kuhn-Tucker conditions)」。
KKT条件第一项是说最优点必须满足所有等式及不等式限制条件,也就是说最优点必须是一个可行解,这一点自然是毋庸置疑的。
第二项表明在最优点 x*,∇f必須是∇h j和∇g k
的线性組合,和都叫作拉格朗日乘子。
所不同的是不等式限制条件有方向性,所以每
一个kµ都必须大於或等於零,而等式限制条件没有方向性,所
以 jλ没有符号的限制,其符号要视等式限制条件的写法而定
备注:该条件是SVM中需要到,处理不等式约束,把它变换成一组等式约束。
广义kkt条件广义KKT条件是指在最优化问题中,用于判断一个解是否满足最优性的一种条件。
KKT条件是对于一个最优化问题的约束条件和目标函数的梯度向量在最优解点处的线性组合,满足一定的性质。
广义KKT条件包括了四个部分:原始可行性条件、对偶可行性条件、互补松弛条件和梯度条件。
下面将对这四个条件进行详细介绍。
1. 原始可行性条件:原始可行性条件是指最优解必须满足所有的约束条件。
对于一个最优化问题,如果存在约束条件,那么最优解必须满足所有的约束条件。
如果最优解不满足某个约束条件,那么这个约束条件就称为活动约束条件。
2. 对偶可行性条件:对偶可行性条件是指最优解的拉格朗日乘子必须是非负的。
拉格朗日乘子是用来表示约束条件对最优解的影响程度的系数。
对于一个最优化问题,如果最优解的拉格朗日乘子有一个小于零的,那么这个约束条件就称为被违反的约束条件。
3. 互补松弛条件:互补松弛条件是指最优解的拉格朗日乘子与约束条件的乘积必须为零。
这个条件是互补条件,也就是说,最优解的拉格朗日乘子与约束条件的乘积要么为零,要么至少有一个为零。
如果最优解的拉格朗日乘子与某个约束条件的乘积为零,那么这个约束条件就称为非活动约束条件。
4. 梯度条件:梯度条件是指最优解的目标函数的梯度向量与约束条件的梯度向量在最优解点处的线性组合必须为零。
这个条件表明,在最优解点处,目标函数的梯度向量与约束条件的梯度向量在方向上是相互抵消的。
如果最优解的目标函数的梯度向量与某个约束条件的梯度向量在最优解点处的线性组合不为零,那么这个约束条件就称为活动约束条件。
广义KKT条件是在最优化问题中,用来判断一个解是否满足最优性的一种条件。
它包括了原始可行性条件、对偶可行性条件、互补松弛条件和梯度条件。
这四个条件共同作用,可以帮助判断一个解是否为最优解。
在实际应用中,广义KKT条件被广泛应用于各种最优化问题的求解中,为求解最优化问题提供了有效的方法和理论基础。
约束优化的KKT条件引言在数学和工程领域,优化问题是一类经典的问题,其目标是找到使得目标函数取得最小(或最大)值的变量取值。
在实际问题中,我们通常会面临各种各样的约束条件,这些约束条件限制了变量的取值范围。
约束优化问题是在满足一定约束条件下,求解最优解的问题。
KKT(Karush-Kuhn-Tucker)条件是约束优化问题的一种重要的解析工具,它提供了一种判断最优解的方法。
本文将详细介绍约束优化的KKT条件,包括KKT条件的定义、理论基础、推导过程以及实际应用。
KKT条件的定义KKT条件是一组必要条件,用于判断约束优化问题的最优解。
对于一个约束优化问题,假设目标函数为f(x),约束条件为g_i(x)≤0,其中x为变量向量。
则KKT条件的定义如下:1.非负性条件:g_i(x)≤0,对所有的i=1,2,…,m。
2.可行性条件:g_i(x)的约束必须满足。
3.梯度条件:存在拉格朗日乘子向量λ,使得目标函数f(x)加上所有约束条件的乘积的梯度为0,即∇f(x)+∑λ_i∇g_i(x)=0。
4.互补松弛条件:对所有的i=1,2,…,m,有λ_i*g_i(x)=0。
KKT条件包含了非负性条件、可行性条件、梯度条件和互补松弛条件四个方面,这些条件综合起来,可以判断一个解是否满足约束优化问题的最优解。
KKT条件的理论基础KKT条件的理论基础可以从拉格朗日乘子法来理解。
拉格朗日乘子法是一种常用的求解有约束优化问题的方法,它通过引入拉格朗日乘子,将约束优化问题转化为无约束优化问题。
对于一个约束优化问题,假设目标函数为f(x),约束条件为g_i(x)≤0,其中x为变量向量。
我们可以构建一个拉格朗日函数L(x,λ)=f(x)+∑λ_ig_i(x),其中λ为拉格朗日乘子向量。
通过求解拉格朗日函数的极小值,可以得到一组变量向量x和拉格朗日乘子向量λ。
根据极值的必要条件,可以推导出KKT条件。
KKT条件的推导过程KKT条件的推导过程可以通过求解拉格朗日函数的极小值来实现。
等式约束kkt条件在优化问题中,等式约束是一种常见的约束类型,它要求变量满足某个等式。
例如,在最大化利润的问题中,等式约束可能表示生产成本、销售价格和生产数量之间的关系。
而KKT条件(Karush-Kuhn-Tucker条件)是解决优化问题中约束条件的一种方法,它涉及到拉格朗日乘子和梯度的一阶条件。
本文将介绍等式约束下的KKT条件及其求解方法。
首先,我们来了解一下等式约束的概念。
在优化问题中,等式约束是指变量满足某个等式的关系。
例如,maximize x subject to x = 2y + 3z 就是一个等式约束问题,其中x、y和z是优化变量,2y + 3z是等式约束。
接下来,我们讨论KKT条件与等式约束的关系。
KKT条件是一个解析优化问题中约束条件的方法,它包括拉格朗日乘子的一阶条件和梯度的一阶条件。
当优化问题中存在等式约束时,KKT条件可以用来判断最优解的存在性和求解最优解。
对于等式约束问题,KKT条件中的拉格朗日乘子λ必须满足以下条件:1.λ >= 0,所有约束条件的拉格朗日乘子都大于等于零。
2.g/x = λh/x,其中g(x)是目标函数,h(x)是等式约束函数。
当满足上述条件时,我们可以使用KKT条件求解等式约束下的最优解。
求解方法如下:1.求解KKT条件:根据目标函数和等式约束函数,求解g/x和h/x。
2.求解λ:根据KKT条件,求解使得等式约束成立的拉格朗日乘子λ。
3.求解最优解:找到满足KKT条件的变量x,即可得到最优解。
最后,我们通过一个实例来说明等式约束下的KKT条件的应用。
假设有一个最大化问题:maximize x subject to x = 2y + 3z and y <= 2首先,构建拉格朗日函数:L(x, y, z, λ) = x - λ(2y + 3z - x)然后,求解KKT条件:1.L/x = 1 - λ*(-1) = 1 + λ2.L/y = -2λ + h/y = 0,其中h(y) = 2 - y3.L/z = 3λ + h/z = 0,其中h(z) = 3z - x接下来,求解λ:1.L/x = 0,得到λ = -12.L/y = 0,得到y = 23.L/z = 0,得到z = x/3最后,求解最优解:将λ、y和z代入原问题,得到最优解为x = 6。
约束优化的kkt条件约束优化的KKT条件是指在有约束的优化问题中,通过引入拉格朗日乘子法将原问题转化成无约束的优化问题,并利用KKT条件进行求解。
KKT条件是指在最优解处,原问题的可行性条件、优化目标函数的一阶必要条件和拉格朗日乘子法中的互补松弛条件同时满足。
一、有约束优化问题在实际应用中,很多优化问题都存在着各种各样的约束条件。
例如,线性规划(LP)和整数规划(IP)等都是有约束的优化问题。
我们以线性规划为例来说明有约束优化问题。
线性规划(LP)模型可以表示为:$$ \begin{aligned} \min_{x}\quad & c^{T}x \\ s.t.\quad & Ax\leq b \\ & x\geq 0 \end{aligned} $$其中$x\in R^{n}$表示决策变量,$c\in R^{n}$表示目标函数系数向量,$A\in R^{m\times n}$表示不等式约束矩阵,$b\in R^{m}$表示不等式右端向量。
上述模型中$x$需要满足两类限制:一类是不等式限制$Ax\leq b$;另一类是非负限制$x\geq 0$。
二、拉格朗日乘子法拉格朗日乘子法是一种常用的处理约束优化问题的方法。
它的基本思想是将约束条件转化为目标函数中的一部分,从而将原问题转化为一个无约束优化问题。
对于上述线性规划模型,我们可以利用拉格朗日乘子法将其转化为无约束优化问题。
具体地,我们可以引入拉格朗日乘子$\lambda\in R^{m}$,并构造拉格朗日函数:$$ L(x,\lambda)=c^{T}x+\lambda^{T}(Ax-b) $$其中,$\lambda_{i}\geq 0$表示第$i$个不等式约束对应的拉格朗日乘子。
令$L(x,\lambda)$对$x$求导,并令导数等于0,则有:$$ \begin{aligned} & \frac{\partial L}{\partialx}=c+A^{T}\lambda=0 \\ & \frac{\partialL}{\partial\lambda}=Ax-b=0 \\ & \lambda_{i}\geq 0, i=1,2,...,m \end{aligned} $$由此可得到KKT条件:$$ \begin{aligned} & c+A^{T}\lambda=0 \\ & Ax-b\leq 0 \\ & (\lambda_{i})_{i=1}^{m}\geq 0 \\ & (\lambda_{i})_{i=1}^{m}(Ax-b)=0 \end{aligned} $$其中第一条是目标函数的一阶必要条件,第二条是不等式约束的可行性条件,第三条是拉格朗日乘子的非负性条件,第四条是互补松弛条件。
最优化问题中的KKT条件及其应用在数学中,最优化问题是一种经常遇到的问题。
一个最优化问题就是想要在一定的限制条件下,找到一个最优的解决方案,使得目标函数达到最小或最大值。
KKT条件是描述约束最优化问题的一组必要和充分条件,本文将会介绍其特点和应用。
一、约束最优化问题简介在实际问题中,我们常常需要求解某种函数的最大值或最小值,而该函数的最大值或最小值受到某些限制条件的限制,这类问题常常称为约束最优化问题。
举例:假设现在手上有100万元人民币,而我们希望该100万元的贷款可以获得尽可能高的投资回报。
对于该问题,我们需要确定以下内容:1. 投资的方案:假设有若干种投资方案可以选择,即在年底结束后能获得相应的回报;2. 投资的约束条件:尽管有若干种投资方案可以选择,但我们不能选择那些不符合以下条件的投资方案:2.1 投资的总额不能超过100万元;2.2 投资方案的回报超过入市利率,否则选择入市即可。
现在,我们需要确定如何选择能够为我们获得更多利润的投资方案。
二、KKT条件简介KKT条件的全称是 Karush-Kuhn-Tucker 条件,它是非线性规划最常用的求解方法之一,是求解约束最优化问题的必要和充分条件。
此处不再赘述它的推导方法,简单介绍一下其形式。
对于非线性约束优化问题:$$\begin{array}{l}{\min f(\mathrm{x})} \\ {\text {s.t. }g_{i}(\mathrm{x}) \leq 0, i=1,2, \ldots, m} \\ {h_{i}(\mathrm{x})=0, i=1,2, \ldots, n}\end{array}$$其中,m和n分别是不等式约束和等式约束的个数。
则KKT条件的形式为:$$\begin{aligned} \nabla f(x)+\sum_{i=1}^{m} \lambda_{i} \nabla g_{i}(x)+\sum_{i=1}^{n} v_{i} \nabla h_{i}(x)=0 \\ \lambda_{i}g_{i}(x)=0 \quad \lambda_{i} \geq 0 \quad i=1,2, \ldots, m \\h_{i}(x)=0 \quad i=1,2, \ldots, n \end{aligned}$$其中,$\lambda_{i}$和$v_{i}$分别代表不等式约束和等式约束的拉格朗日乘子。
KKT条件详解KKT条件详解主要参考和这个知乎回答。
KKT最优化条件是Karush[1939],以及Kuhn和Tucker[1951]先后独⽴发表出來的。
这组最优化条件在Kuhn和Tucker发表之后才逐渐受到重视,因此许多情况下只记载成库恩塔克条件(Kuhn-Tucker conditions)它是⾮线性规划领域的重要成果,是判断某点是极值点的必要条件。
对于凸规划,KKT条件就是充要条件了,只要满⾜则⼀定是极值点,且⼀定得到的是全局最优解(凸问题)。
KKT条件的引⼊推⼴了拉格朗⽇乘⼦法,拉格朗⽇乘数法原本只是解决等式约束下的优化问题,本科的⾼数⾥就讲了(我竟读研了才学懂,惭愧),⽽引⼊KKT条件的拉格朗⽇乘⼦法可⽤于更普遍的有不等式约束的情况。
(⼀)问题模型“等式约束+不等式约束” 优化问题是最复杂也最常见的⼀种模型。
问题建模为:min f ( x ) s . t . h k ( x ) = 0 , g j ( x ) ≤ 0 j = 1 , 2 … , n ; k = 1 , 2 … , l \min f(x) \quad s.t.h_k(x)=0\quad,\quad g_j(x)\leq0\quadj=1,2\ldots,n;k=1,2\ldots,lminf(x)s.t.hk(x)=0,gj(x)≤0j=1,2…,n;k=1,2…,l思路是要把问题转化为⽆约束的简单优化问题,分为两步:1. 先把不等式约束条件转化为等式约束条件。
how?→ \to→引⼊松弛变量,即KKT乘⼦2. 再把等式约束转化为⽆约束优化问题。
how? → \to→引⼊拉格朗⽇乘⼦(⼆)⼀点铺垫后⾯要⽤这个结论:实质上,KKT条件描述的是:这个点已经是可⾏域(满⾜所有约束条件的n维空间)的边界了,再⾛⼀点就不满⾜约束条件了。
显然,最优解⼀定在可⾏域的边界上的,以初中学的线性规划作为简单的例⼦,这张图的紫⾊区域就是四个不等式约束限定的可⾏域,如果求z=x+2y的最⼤值,结果当然是红星点取得最⼤值,总之极值点应该在可⾏域的边界,这在⾃变量多的⾼维可⾏域空间也是如此,只是不好画图直观去看了。
深入理解拉格朗日乘子法(Lagrange Multiplier) 和KKT条件在求取有约束条件的优化问题时,拉格朗日乘子法(Lagrange Multiplier) 和KKT条件是非常重要的两个求取方法,对于等式约束的优化问题,可以应用拉格朗日乘子法去求取最优值;如果含有不等式约束,可以应用KKT条件去求取。
当然,这两个方法求得的结果只是必要条件,只有当是凸函数的情况下,才能保证是充分必要条件。
KKT条件是拉格朗日乘子法的泛化。
之前学习的时候,只知道直接应用两个方法,但是却不知道为什么拉格朗日乘子法(Lagrange Multiplier) 和KKT条件能够起作用,为什么要这样去求取最优值呢?本文将首先把什么是拉格朗日乘子法(Lagrange Multiplier) 和KKT条件叙述一下;然后开始分别谈谈为什么要这样求最优值。
一. 拉格朗日乘子法(Lagrange Multiplier) 和KKT条件通常我们需要求解的最优化问题有如下几类:(i) 无约束优化问题,可以写为:min f(x);(ii) 有等式约束的优化问题,可以写为:min f(x),s.t. h_i(x) = 0; i =1, ..., n(iii) 有不等式约束的优化问题,可以写为:min f(x),s.t. g_i(x) <= 0; i =1, ..., nh_j(x) = 0; j =1, ..., m对于第(i)类的优化问题,常常使用的方法就是Fermat定理,即使用求取f(x)的导数,然后令其为零,可以求得候选最优值,再在这些候选值中验证;如果是凸函数,可以保证是最优解。
对于第(ii)类的优化问题,常常使用的方法就是拉格朗日乘子法(Lagrange Multiplier) ,即把等式约束h_i(x)用一个系数与f(x)写为一个式子,称为拉格朗日函数,而系数称为拉格朗日乘子。
通过拉格朗日函数对各个变量求导,令其为零,可以求得候选值集合,然后验证求得最优值。
A Brief Lecture Notes on Optimization forMicroeconomic Analysis1冯曲复旦大学经济学院中国经济研究中心第一稿 2003年1月一切匠心都归功于Dixit, Chiang, Takayama等杰出的前辈;所有的错误、遗漏为编者所有。
他是个顽皮的孩子,不肯就安分的待在身旁;我们要做的是,不能让他的玩耍脱离我们的视线。
1欢迎指出错误及评论。
qufeng@目录A.最优规划问题 (3)B.梯度向量 (3)B.1.无约束极值问题 (3)B.1.1向量的内积 (4)B.2.约束极值问题 (6)B.2.1雅克比矩阵 (8)B.2.2隐函数定理 (8)B.2.3超平面 (9)C.等式约束极值的拉格朗日求解法 (10)D.非线性规划问题的求解:库恩-塔克条件 (11)E.二阶条件 (14)E.1无约束极值问题 (14)E.1.1泰勒展开 (14)E.1.2 二次型 (16)E.2等式约束极值问题 (17)E.3不等式约束问题 (21)F.凹规划 (22)F.1.1凸集 (22)F.1.2凸函数 (22)F.1.3.凹函数 (23)F.2.凹规划 (24)F.3.拟凹函数、拟凸函数 (25)G.最优化问题的解 (28)G.1.基本概念 (28)G.1.1紧集 (28)G.1.2.函数的连续 (28)G.1.3韦氏定理 (28)G.2.解的存在性和唯一性 (29)G.2.1.存在性定理 (29)G.2.2唯一性定理 (30)G.3 分离 (31)H.比较静态分析 (33)H.1.基本思想 (33)H.2.一般方法 (34)I.包络定理 (36)I.1.最大值函数 (36)I.2.包络定理 (37)I.3.拉格朗日乘子的含义 (39)I.4.包络定理的应用 (40)A.最优规划问题:cx g t s x f x=)(..)(max这样一个规划问题可以用来表达一个在一定资源约束情况下的经济决策问题,其中)(x f 称为目标函数,x 为选择变量,)(x g 为约束函数。