平面连杆摆动机构的运动特征探讨
- 格式:pdf
- 大小:1.19 MB
- 文档页数:29

脚踏机构、复摆式颚式破碎机、钢材输送机等。
图1平面四杆机构曲柄与连杆第1次共线位置图2平面四杆机构曲柄与连杆第2次共线位置在摆动导杆机构中,已知曲柄长度b=25mm,机架长度b=50mm,原动件为曲柄b,为匀速转动,角速度ω=2πrad/s。
在Adams/View中设定各构件长度,并在连接处进行铰链约束,其中机构的曲柄与机架的连接处定义一个伺服电动机,电动机转速设置为360deg/sec,摆动导杆机构的运转时间为3s。
见图3、图4所示摆动导杆机构仿真时,导杆摆角左右极限位置。
从图3、图4中可以看到摆动导杆机构导杆的等装置中。
图3摆动导杆机构导杆摆角左极限位置图4摆动导杆机构导杆摆角右极限位置曲柄滑块机构,已知曲柄长度a=20mm,连杆长度b= 60mm,偏距e=10mm,原动件为构件曲柄,为匀速转动,角速度ω=2πrad/s。
在Adams/View中设定各构件长度,并在连接处进行铰链约束,其中机构的曲柄与机架的连接处定义一个伺服电动机,电动机转速设置为360deg/sec,曲柄滑块机构的运转时间为3s。
见图5、图6所示曲柄滑块机构仿真时,连杆摆角上下极限位置。
从图5、图6中可以看到曲柄滑块机构导杆的摆角变化、速度变化、加速度的变化以及滑块的位移变化,当曲柄垂直滑块导路时连杆摆角上极限位置时,连杆的摆角为21°最大值,此时机构的压力角最大,传动角最小,滑块在回程中的速度从高往低下降,回程的时间比工作行程的时间略短,滑块的加速度反而处在上升的趋势;当曲柄垂直滑块导路时连杆摆角下极限位置时,连杆压缩机、冲床等的主机构中。
图5曲柄滑块机构连杆摆角上极限位置图6曲柄滑块机构连杆摆角下极限位置2结束语采用ADAMS对平面连杆机构、摆动导杆机构、偏置曲柄滑块机构中急回特性进行运动仿真,让学生直观的看到“运动”的机构,可形象清晰地将机构的运动状态、传动角变化、死点位置及急回特性展示在学生面前,使学生获得对机构特性的感性认识。


第4章平面连杆机构的运动分析第一篇:第4章平面连杆机构的运动分析第4章平面连杆机构运动分析习题4-1.求出下列机构中所有速度瞬心(a)(b)(c)(d)图4-14-2.在图4-2所示摆动导杆机构中,∠BAC=90ο,lAB=60mm,lAC=120mm,曲柄AB的等角速度ω1=30rad/s,求构件3的角速度ω3和角加速度α3。
4-3.在图4-3所示机构中,已知ϕ1=45,ω1=100rad/s,方向为逆时针方向,lAB=4m,γ=60。
求构件2的角速度ω2和构件3的速度v3。
οο图4-2图4-3第二篇:平面连杆机构1.机构中的运动副若为低副,指的是________。
A.回转副和齿轮副B.移动副和凸轮副C.回转副和移动副D.齿轮副和凸轮副2.机构中的运动副若为高副,指的是________。
A.回转副和齿轮副 B.移动副和齿轮副 C.回转副和移动副 D.齿轮副和凸轮副3.连杆机构中的所谓连杆是指________。
A.不与机架相连的杆B.与机架相连的杆 C.能做整周旋转的杆 D.只能做往复摆动的杆4.平面铰链四杆机构中,能做整周旋转的连架杆称为________,只能做往复摆动的连架杆称为________。
A.曲柄/连杆B.曲柄/摇杆C.摇杆/曲柄 D.曲柄/导杆5.铰链四杆机构中,能做整周旋转的连架杆称为________;只能往复摇摆某一角度的连架杆称为________;与两连架杆相连接,借以传递运动和动力的构件称为________。
A.摇杆/曲柄/滑块B.摇杆/曲柄/连杆C.曲柄/连杆/摇杆D.曲柄/摇杆/连杆6.在平面铰链四杆机构中,与机架相对的构件称为________。
A.连架杆 B.连杆 C.曲柄 D.摇杆7.铰链四杆机构的三种基本形式是:________机构、________机构和双摇杆机构。
A.曲柄摇杆/曲柄滑块B.曲柄摇杆/双曲柄C.双曲柄/双连杆D.曲柄摇杆/双连杆8.若平面铰链四杆机构中,一个连架杆能做整周旋转,另一个连架杆只能做往复摆动,则该机构称为________。
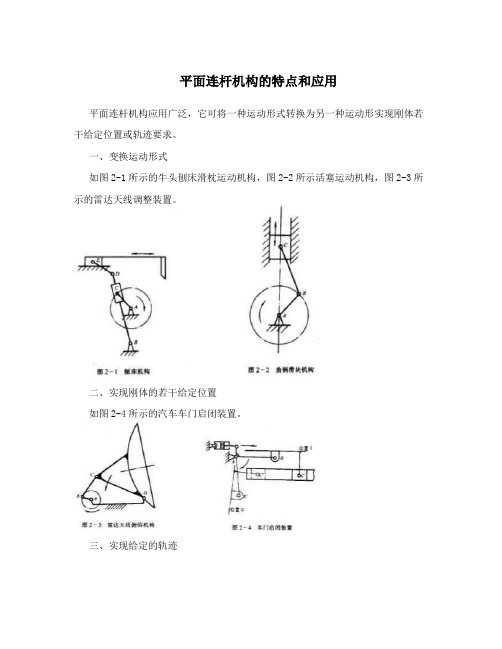
平面连杆机构的特点和应用
平面连杆机构应用广泛,它可将一种运动形式转换为另一种运动形实现刚体若干给定位置或轨迹要求。
一、变换运动形式
如图2-1所示的牛头刨床滑枕运动机构,图2-2所示活塞运动机构,图2-3所示的雷达天线调整装置。
二、实现刚体的若干给定位置
如图2-4所示的汽车车门启闭装置。
三、实现给定的轨迹
平面连杆机构中连杆作复杂平面运动,连杆上各点的运动轨迹,在生产中往往利用某一点的运动轨迹来满足工作需要。
如图2-5所示的搅拌器。
四、连杆机构应用和特点
应用:起重、运输、冶金、化工、动力、农业、纺织、食品、机床等机械。
优点:1)它可以满足不同类型、不同规律的运动要求和动力要求;2)采用低副连接,是面接触易制造、压强小、耐磨损、可承受较大载荷、寿命长;
缺点:在连接处存在一定间隙,因而会降低运动精度,构件数增多时,设计较困难。

平面连杆机构及其分析与设计平面连杆机构是由连杆和连接点组成的机械结构,广泛应用于各种机械设备中。
它的功能是将输入的旋转运动转化为输出的直线运动或者将输入的直线运动转化为输出的旋转运动。
本文将对平面连杆机构的分析与设计进行介绍。
首先,对平面连杆机构进行分析。
平面连杆机构的主要组成部分是连杆和连接点。
连杆是连接点之间的刚性杆件,可以是直杆、曲杆或者具有其他特殊形状的杆件。
连接点是连杆的两个端点或者连杆与其他机构的连接点,可以是支点、铰链等。
平面连杆机构的运动可以分为三种基本类型:平动、转动和复动。
平动是指连杆的一端保持固定,另一端进行直线运动;转动是指连杆的一端保持固定,另一端进行旋转运动;复动是指连杆的一端进行直线运动,另一端同时进行旋转运动。
进行平面连杆机构的设计时,需要考虑以下几个要点。
首先,确定机构的类型和功能。
根据机构的动作要求和功能要求,选择适合的连杆类型和连接点类型。
其次,进行机构的运动分析。
根据机构的运动要求,确定连杆的长度和连接点的位置,使连杆能够实现所需的运动。
然后,进行机构的力学分析。
根据机构的受力情况,确定连杆的截面尺寸和材料,保证机构的刚度和强度。
最后,进行机构的优化设计。
考虑机构的性能要求和制造要求,对机构进行优化设计,提高机构的工作效率和使用寿命。
在平面连杆机构的设计中,还需要考虑机构的动力学问题。
机构的动力学分析包括静力学分析和动力学分析两个方面。
静力学分析是指在机构静止或静力平衡状态下,对机构受力和力矩进行分析。
动力学分析是指在机构进行运动时,对机构的加速度、速度和位移进行分析。
通过对机构的动力学分析,可以确定机构的惯性力和惯性矩,从而确定机构的动态特性和振动特性。
总之,平面连杆机构的分析与设计是一项复杂而重要的工作。
在进行分析与设计时,需要考虑机构的类型和功能,进行运动分析和力学分析,优化设计和动力学分析。
通过合理的分析与设计,可以使机构具有较好的工作性能和使用寿命,满足各种工程应用的要求。

平面连杆机构特点及应用平面连杆机构是一种由连杆和连接点组成的机械装置,它可以转换旋转运动为直线运动或者直线运动为旋转运动。
它由于结构简单,使用方便,因此在机械工程中具有广泛的应用。
平面连杆机构的特点是:1. 结构简单,由少量的连杆和连接点组成,易于制造和装配。
2. 运动准确,通过合理设计,平面连杆机构可以实现规定的运动轨迹,具有较高的运动准确性。
3. 运动速度可调,通过调整连杆的长度,可以改变连杆机构的速度比,从而调整输出端的运动速度。
4. 负载均衡,平面连杆机构能够根据负载的大小,自动分配力的作用方向与大小,实现负载均衡。
5. 运动部件相对比较少,摩擦损失小,效率较高。
平面连杆机构的应用非常广泛,以下是其中几个典型的应用领域:1. 发动机:在内燃机中,连杆机构将发动机的往复运动转化为旋转运动,带动曲轴实现发动机的工作。
2. 汽车悬挂系统:在汽车悬挂系统中,平面连杆机构可以通过改变连杆的长度和连接点的位置,调整汽车底盘和车轮的相对位置,实现悬挂系统的弹性调节。
3. 工业机器人:平面连杆机构常被应用于工业机器人的关节处,通过控制连杆的长度和运动轨迹,实现机器人的准确定位和运动控制。
4. 印刷机:平面连杆机构可以将旋转运动转化为直线运动,用于控制印刷机纸张的进给和印版的压印,提高印刷精度。
5. 机械手臂:平面连杆机构可以被用于机械手臂的关节处,通过控制连杆的长度和运动轨迹,实现机械手臂的运动控制和精确抓取。
总之,平面连杆机构由于其结构简单、运动准确、运动速度可调、负载均衡等特点,在机械工程中具有广泛的应用前景。
无论是在发动机、汽车悬挂系统、工业机器人、印刷机还是机械手臂等领域,平面连杆机构都能够发挥重要的作用,实现运动控制和精确定位。