摄像头镜头参数概念sensor简介分析
- 格式:pptx
- 大小:1.38 MB
- 文档页数:20

摄像头的镜头、主控芯片和感光芯片分类作者: 日期: 2009-12-03摄像头的品质从硬件上来说主要是:镜头、主控芯片与感光芯片。
1、镜头(LENS)五层“全玻”,也算目前顶级的摄像头镜头了。
镜头的组成是透镜结构,由几片透镜组成,一般有塑胶透镜(plastic)或玻璃透镜(glass)。
通常摄像头用的镜头构造有:1P、2P、1G1P、1G2P、2G2P、4G等。
透镜越多,成本越高;玻璃透镜比塑胶贵。
因此一个品质好的摄像头应该是采用玻璃镜头,成像效果就相对塑胶镜头会好。
现在市场上的大多摄像头产品为了降低成本,一般会采用塑胶镜头或半塑胶半玻璃镜头(即:1P、2P、1G1P、1G2P等)。
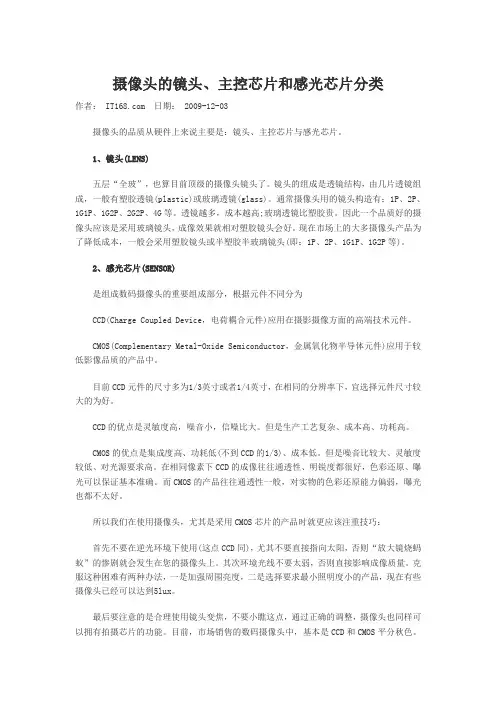
2、感光芯片(SENSOR)是组成数码摄像头的重要组成部分,根据元件不同分为CCD(Charge Coupled Device,电荷耦合元件)应用在摄影摄像方面的高端技术元件。
CMOS(Complementary Metal-Oxide Semiconductor,金属氧化物半导体元件)应用于较低影像品质的产品中。
目前CCD元件的尺寸多为1/3英寸或者1/4英寸,在相同的分辨率下,宜选择元件尺寸较大的为好。
CCD的优点是灵敏度高,噪音小,信噪比大。
但是生产工艺复杂、成本高、功耗高。
CMOS的优点是集成度高、功耗低(不到CCD的1/3)、成本低。
但是噪音比较大、灵敏度较低、对光源要求高。
在相同像素下CCD的成像往往通透性、明锐度都很好,色彩还原、曝光可以保证基本准确。
而CMOS的产品往往通透性一般,对实物的色彩还原能力偏弱,曝光也都不太好。
所以我们在使用摄像头,尤其是采用CMOS芯片的产品时就更应该注重技巧:首先不要在逆光环境下使用(这点CCD同),尤其不要直接指向太阳,否则“放大镜烧蚂蚁”的惨剧就会发生在您的摄像头上。
其次环境光线不要太弱,否则直接影响成像质量。
克服这种困难有两种办法,一是加强周围亮度,二是选择要求最小照明度小的产品,现在有些摄像头已经可以达到5lux。
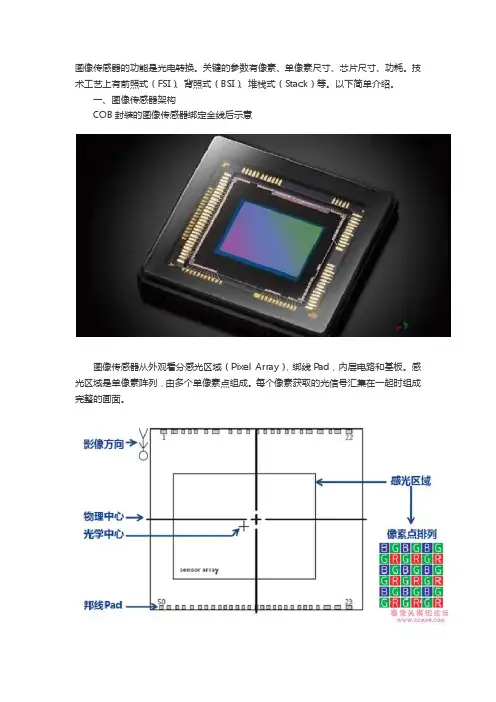
图像术工光区完整像传感器的功工艺上有前照一、图像传COB 封装的图像传感器区域是单像素整的画面。
功能是光电转照式(FSI)、传感器架构的图像传感器器从外观看分素阵列,由多转换。
关键的背照式(B 器绑定金线分感光区域多个单像素点的参数有像素BSI)、堆栈式线后示意(Pixel Arr 点组成。
每个素、单像素尺式(Stack)ray),绑线个像素获取的尺寸、芯片尺等。
以下简Pad,内层电的光信号汇集尺寸、功耗简单介绍。
电路和基板集在一起时组。
技。
感组成镜修头的部通光区理和 CMOS 芯片CMOS 芯片由于光线进修正光线角度的CRA 保持电路架构上通常包含有电区域(Pixel A 和一定的编码片由微透镜层片剖面图进入各个单像度,使光线垂持在一点的偏上,我们加入电源、数据、Array)将光码后通过数据层、滤色片像素的角度不垂直进入感光偏差范围内。
入图像传感器时钟、通讯光信号转换为据接口将电信片层、线路层不一样,因此光元件表面。
器是一个把光讯、控制和同为电信号后信号输出。
层、感光元件此在每个单像。
这就是芯光信号转为电同步等几部分,由暗盒中的件层、基板层像素上表面增片CRA 的概电信号的暗盒分电路。
可以的逻辑电路将层组成。
增加了一个微概念,需要与盒,那么暗盒以简单理解将电信号进行微透与镜盒外为感行处20M 1/2 微米整体一个 友们二、图像传1.像素:指M,像素越多2.芯片尺寸.3inch 等。
3.单像素尺米,1.34微米体性能就相对个相当关键的其他更深入们可以研究探传感器关键参指感光区域内多,拍摄画面寸:指感光区域芯片尺寸越尺寸:指单个米,1.5微米对较高,最终的参数。
入的参数比如探讨。
参数内单像素点的面幅面就越大域对角线距越大,材料成个感光元件的米等。
开口尺终拍摄画面的如SNR,Se 的数量,比如大,可拍摄距离,通常以英成本越高。
的长宽尺寸尺寸越大,单的整体画质相ensitivity,如5Maga 摄的画面的细英制单位表示,也称单像单位时间内进相对较优秀。
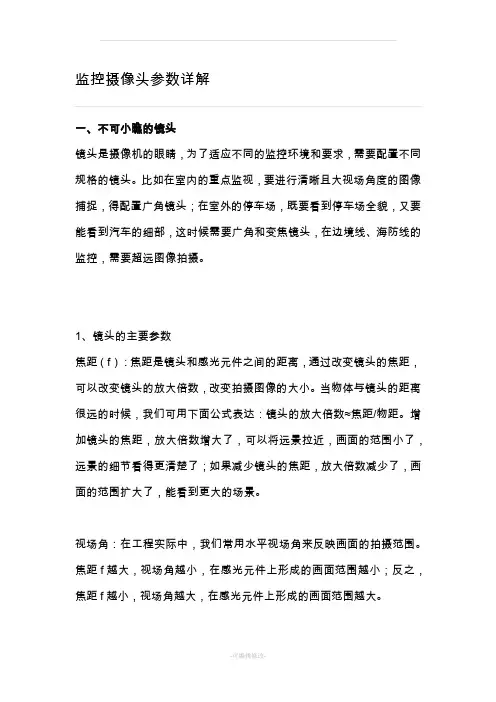
监控摄像头参数详解一、不可小瞧的镜头镜头是摄像机的眼睛,为了适应不同的监控环境和要求,需要配置不同规格的镜头。
比如在室内的重点监视,要进行清晰且大视场角度的图像捕捉,得配置广角镜头;在室外的停车场,既要看到停车场全貌,又要能看到汽车的细部,这时候需要广角和变焦镜头,在边境线、海防线的监控,需要超远图像拍摄。
1、镜头的主要参数焦距(f):焦距是镜头和感光元件之间的距离,通过改变镜头的焦距,可以改变镜头的放大倍数,改变拍摄图像的大小。
当物体与镜头的距离很远的时候,我们可用下面公式表达:镜头的放大倍数≈焦距/物距。
增加镜头的焦距,放大倍数增大了,可以将远景拉近,画面的范围小了,远景的细节看得更清楚了;如果减少镜头的焦距,放大倍数减少了,画面的范围扩大了,能看到更大的场景。
视场角:在工程实际中,我们常用水平视场角来反映画面的拍摄范围。
焦距f越大,视场角越小,在感光元件上形成的画面范围越小;反之,焦距f越小,视场角越大,在感光元件上形成的画面范围越大。
光圈:光圈安装在镜头的后部,光圈开得越大,通过镜头的光量就越大,图像的清晰度越高;光圈开得越小,通过镜头的光量就越小,图像的清晰度越低。
通常用F(光通量)来表示。
F=焦距(f)/通光孔径。
在摄像机的技术指标中,我们可以常常看到6mm/F1.4这样的参数,它表示镜头的焦距为6mm,光通量为1.4,这时我们可以很容易地计算出通光孔径为4.29mm。
在焦距f相同的情况下,F值越小,光圈越大,到达CCD芯片的光通量就越大,镜头越好。
2、镜头的分类按视角的大小分类按光圈分类二、提高图像清晰的根本在于提高摄像机的感光能力1、感光元件的作用目前,主流监控摄像机的感光元件采用CCD元件,实际上就是光电转换元件。
和以前的CMOS感光元件相比,CCD的感光度是CMOS的3到10倍,因此CCD芯片可以接受到更多的光信号,转换为电信号后,经视频处理电路滤波、放大形成视频信号输出。
接受到的光信号越强,视频信号的幅值就越大。
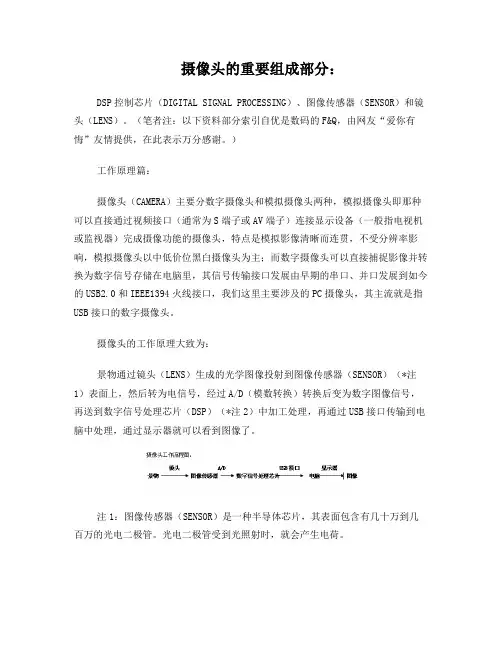
摄像头的重要组成部分:DSP控制芯片(DIGITAL SIGNAL PROCESSING)、图像传感器(SENSOR)和镜头(LENS)。
(笔者注:以下资料部分索引自优是数码的F&Q,由网友“爱你有悔”友情提供,在此表示万分感谢。
)工作原理篇:摄像头(CAMERA)主要分数字摄像头和模拟摄像头两种,模拟摄像头即那种可以直接通过视频接口(通常为S端子或AV端子)连接显示设备(一般指电视机或监视器)完成摄像功能的摄像头,特点是模拟影像清晰而连贯,不受分辨率影响,模拟摄像头以中低价位黑白摄像头为主;而数字摄像头可以直接捕捉影像并转换为数字信号存储在电脑里,其信号传输接口发展由早期的串口、并口发展到如今的USB2.0和IEEE1394火线接口,我们这里主要涉及的PC摄像头,其主流就是指USB接口的数字摄像头。
摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器(SENSOR)(*注1)表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)(*注2)中加工处理,再通过USB接口传输到电脑中处理,通过显示器就可以看到图像了。
注1:图像传感器(SENSOR)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。
光电二极管受到光照射时,就会产生电荷。
注2:数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。
部件解构:1、图像传感器在摄像头的三大结构组件中,最重要的个人认为就是图像传感器了,因为感光器件对成像质量的重要性不言而喻,对DV/DV有了解的朋友应该十分清楚这一点。
SENSOR可以分为两类:CCD(charge couple device):电荷耦合器件CMOS(complementary metal oxide semiconductor):互补金属氧化物半导体前者的价格比较高,因此多用在高端摄像头上,比如下图所示的罗技快看高手版Pro4000 :而CMOS摄像头则是非常主流(性能,包括价格)的大众级产品,从理论上说,CCD传感器在灵敏度、分辨率、噪声控制等方面都优于CMOS传感器,而CMOS 传感器则具有低成本、低功耗、以及高整合度的特点。
摄像头-Camerasensor基本知识⼀、Camera ⼯作原理介绍1. 结构 .⼀般来说,camera 主要是由 lens 和 sensor IC 两部分组成,其中有的 sensor IC 集成 了 DSP,有的没有集成,但也需要外部 DSP 处理。
细分的来讲,camera 设备由下边⼏部 分构成: b$ w6 [# i& q% p* E1) lens(镜头) ⼀般 camera 的镜头结构是有⼏⽚透镜组成,分有塑胶透镜(Plastic)和玻璃透 镜(Glass) ,通常镜头结构有:1P,2P,1G1P,1G3P,2G2P,4G 等。
2) sensor(图像传感器) Senor 是⼀种半导体芯⽚,有两种类型:CCD 和 CMOS。
Sensor 将从 lens 上传导过来的光线转换为电信号, 再通过内部的 AD 转换为数字信号。
由于 Sensor 的每个 pixel 只能感光 R 光或者 B 光或者 G 光, 因此每个像素此时存贮的是单⾊的, 我们称之为 RAW DATA 数据。
要想将每个像素的 RAW DATA 数据还原成三基⾊,就需要 ISP 来处理。
3)ISP(图像信号处理) 主要完成数字图像的处理⼯作,把 sensor 采集到的原始数据转换为显⽰⽀持 的格式。
2 {4 w# {. R- z% Y4)CAMIF(camera 控制器) 芯⽚上的 camera 接⼝电路,对设备进⾏控制,接收 sensor 采集的数据交给 CPU,并送⼊ LCD 进⾏显⽰。
2. ⼯作原理 . & W* e" B3 D6 O) |4 k外部光线穿过 lens 后, 经过 color filter 滤波后照射到 Sensor ⾯上, Sensor 将从 lens 上传导过来的光线转换为电信号,再通过内部的 AD 转换为数字信号。
如果 Sensor 没有集 成 DSP,则通过 DVP 的⽅式传输到 baseband,此时的数据格式是 RAW DATA。
手机摄像头sensor基础知识作为手机新型的拍摄功能,内置的数码相机功能与我们平时所见到的低端的(10万-130万像素)数码相机相同。
与传统相机相比,传统相机使用“胶卷”作为其记录信息的载体,而数码摄像头的“胶卷”就是其成像感光器件,是数码拍摄的心脏。
感光器是摄像头的核心,也是最关键的技术。
摄像头按结构来分,有内置和外接之分,但其基本原理是一样的。
按照其采用的感光器件来分,有CCD和CMOS之分:CCD(Charge Coupled Device,电荷耦合组件)使用一种高感光度的半导体材料制成,能把光线转变成电荷,通过模数转换器芯片转换成数字信号,数字信号经过压缩以后由相机内部的闪速存储器或内置硬盘卡保存,因而可以轻而易举地把数据传输给计算机,并借助于计算机的处理手段,根据需要和想像来修改图像。
CCD由许多感光单位组成,当CCD表面受到光线照射时,每个感光单位会将电荷反映在组件上,所有的感光单位所产生的信号加在一起,就构成了一幅完整的画面。
它就像传统相机的底片一样的感光系统,是感应光线的电路装置,你可以将它想象成一颗颗微小的感应粒子,铺满在光学镜头后方,当光线与图像从镜头透过、投射到CCD表面时,CCD就会产生电流,将感应到的内容转换成数码资料储存起来。
CCD像素数目越多、单一像素尺寸越大,收集到的图像就会越清晰。
因此,尽管CCD数目并不是决定图像品质的唯一重点,我们仍然可以把它当成相机等级的重要判准之一。
目前扫描机、摄录放一体机、数码照相机多数配备CCD。
CCD经过长达35年的发展,大致的形状和运作方式都已经定型。
CCD 的组成主要是由一个类似马赛克的网格、聚光镜片以及垫于最底下的电子线路矩阵所组成。
目前有能力生产 CCD 的公司分别为:SONY、Philps、Kodak、Matsushita、Fuji和Sharp,大半是日本厂商。
CMOS(Complementary etal-Oxide Semiconductor,附加金属氧化物半导体组件)和CCD一样同为在数码相机中可记录光线变化的半导体。
CameraSensor基础知识1. 感光原理Camera Sensor是由数百万上千万数量⼩⽅块的CCD或CMOS感光元件(简称像素),以平⾯阵列⽅式排列组成,其感光原理是于感光元件表层上整合RGB(红、绿、蓝)三原⾊的滤镜,通过对⼀个⼀个的感光点对光进⾏采样和量化形成图像。
Sensor中每⼀个感光点只对应⼀个彩⾊滤光⽚,因此只能感光RGB中的⼀种颜⾊。
通常所说的30万像素或130万像素等,指的是有30万或130万个感光点。
如果⼀台拥有⼀千⼆百万像素的数码相机,明显地就是最少12,000,000⼩⽅块的感光元件了Sensor的彩⾊滤镜阵列元件,基本上是采⽤了Bayer图样(RGRG/GBGB排列如上图)的排列⽅式,实现RGB三原⾊滤镜依序,以Striped Array(条状阵列)形式,红、蓝、绿相互交替,各施其职,分别去 "捕捉" 三原⾊的光能量。
以光学的⾓度⽽⾔,应该说成是光线通过镜头的不同镜⽚组,投射抵达⾄整合了Bayer图样的条状阵列RGB滤镜的图像传感器,⽽图像传感器记录了进光量的电荷,转成数字参数,成为了RAW⽂件的图像信息即RAW DATA。
绿⾊滤镜元件,是红、蓝的2倍,只因⼈类眼睛识别颜⾊不是线性的,我们的眼睛对于绿⾊,显然是⽐较敏感。
因此护眼常识都在⿎励⼈们多看绿⾊的缘故。
理论上RGB的3原⾊滤镜数量⽐例是1: 2: 1。
Bayer RGB是属于 RGB RAW data的,但是 RGB RAW data不⼀定是Bayer pattern。
Sensor输出的RAW格式图像⼤⼩取决于⾃⾝特性与配置,例如某款Sensor配置为10-bit RGB RAW并且图像尺⼨为1024*768,那么单帧图像⼤⼩为1024*768*10bit=7680kb。
当然也有些Sensor内置格式转换单元,可以直接输出YUV数据或者RGB数据。
2. 输出接⼝-DVPDVP(Digital Video Port)是传统的sensor输出接⼝,采⽤并⾏输出⽅式,数据位宽有8bit、10bit、12bit、16bit等,是CMOS电平信号(重点是⾮差分信号)。
图像sensor的特性和驱动解析并⼝,LVDS,MIPI,GMSL1、并⼝(1)OV9712和AR0130都是并⼝的(2)并⼝的接⼝定义:参考AR0130的原理图pdf(3)并⼝传输的是CMOS电平信号(重点是⾮差分)(4)并⼝sensor属于较低端⽼旧的,新型⾼像素的都是MIPI/LVDS/HISPI等差分信号的2、LVDS(1)low voltage differential signal,低电压差分信号(2)接⼝由1组差分clock和若⼲组差分信号线组成,输出串⾏数据信号(3)LVDS主要⽤于视频传输的2个领域:camera和主控、LCD和主控(4)LVDS利⽤差分抗⼲扰能⼒,提升clock频率从⽽提升带宽,传输距离也更远(5)LVDS的数据线组数越多带宽越⼤、clock频率越⾼带宽越⼤(牺牲抗⼲扰和距离)(6)并⼝和LVDS之间可以互转,但是需要专门的电平转换芯⽚(类似于232和485)3、MIPI(MIPI-CSI2)CSI -- 相机串⾏接⼝ DSI -- 显⽰串⾏接⼝(1)MIPI: mobile industry processor interface,移动⼯业处理器接⼝(2)MIPI接⼝由1组差分clock和1-4组差分信号线组成(3)MIPI和LVDS虽然都是差分对信号,但是不兼容,不能直接对接(4)MIPI的架构层次更分明,⼴泛应⽤在⼿机平板等领域中,可以认为MIPI是LVDS的升级版(5)MIPI的数据线组数越多带宽越⼤、clock频率越⾼带宽越⼤(牺牲抗⼲扰和距离)(6)MIPI和LVDS和并⼝之间均可以互相转换,但是需要专门的电平转换芯⽚4、GMSLGMSL(Gigabit Multimedia Serial Link),是串⾏器和解串器构成的传输链路。
串⾏器是为了将ISP处理过的并⾏信号传输到远端(域控制器)。
解串器在接收端(域控制器)。
并⾏传送要求同⼀时序输出与接收信号,⽽过分提升时钟频率会导致时序错乱,信号线间⼲扰。
手机摄像头sensor基础知识
声对图象质量影响很大。
在相同分辨率下,CMOS价格比CCD便宜,但是CMOS器件产生的图像质量相比CCD来说要低一些。
到目前为止,市面上绝大多数的消费级别以及高端数码相机都使用CCD作为感应器;CMOS感应器则作为低端产品应用于一些摄像头上。
是否具有CCD感应器一度成为人们判断数码相机档次的标准之一。
而由于CMOS的制造成本和功耗都要低于CCD不少,所以很多手机生产厂商采用的都是CMOS镜头。
现在,市面上大多数手机都采用的是CMOS摄像头,少数也采用了CCD摄像头。
Sharpness 锐度(解析度)锐度是最重要的单一图像质量评价因素:它决定了图像的细节表达能力。
摄像设备或系统的锐度使用空间频率响应SFR (Spatial Frequency Response)来衡量,也称为调制传递函数MTF (Modulation Transfer Function)。
MTF是指某一特定空间频率(以周期或线对/单位距离表示)的对比度。
用“50%MTF”来表示锐度的方法大大优于旧的表示方法,50%MTF表明细节从这个频率开始消失。
在打印或显示系统中衡量锐度的指标是主观质量因素SQF (Subjective Quality Factor),源于人类视觉系统的MTF和对比敏感度CSF(Contrast SensitivityFunction)。
Imatest的锐度测量项目使用SFR作为指标,测试用的标版(chart)可以购买或利用Imatest 软件的测试标版模块来打印。
另一种测量MTF的方法是利用正弦模式标版来增加频率对数。
这种方法提供了一个通过检查图像倾斜边缘的方法来测试MTF,这种方法更直接但不太精确。
摄像系统的锐度取决于镜头(设计和制造质量,焦距,光圈,以及到图像中心的距离)和传感器(像素数和低通截止滤波器)。
此外,锐度也受相机抖动(好的三脚架可以有所帮助)、对焦精度和大气扰动(热效应和灰尘)的影响。
有些失去的锐度可以通过边缘强化来恢复,但边缘强化的能力是有限度的。
在图像MTF非常低(在10%左右)的情况下,它不能恢复图像的细节。
而且过度的边缘强化还可能降低图像质量(特别是在大的放大倍率下观察),造成“光圈”附近出现相反的边界。
许多由小型数码相机拍摄的图片都存在边缘过度强化的现象。
Noise 噪声噪声是一个随机变化的影像干扰,在胶片上是随机出现的颗粒而在数字图像上是像素水平的随机变化。
它产生于材料的基本物理性质——图像传感器内部热运动产生的电荷。
噪声测量可以在几个Imatest模块中进行。
摄像机各参数解释1. 像素大小(Pixel Size):指个别感应像素的实际尺寸大小,不论是长或宽,都以μm(Micrometer)为计量单位。
像素愈大,则所需曝光成像时间较短,但却会牺牲些许空间分辨率。
反之,像素愈小,则需较久的曝光成像时间,成像之后的影像分辨率,则较好。
2. AE(Auto Exposure):结合AGC及IRIS马达控制的使用,使摄影机能在很宽广的光线条件下使用。
AGC能在很低亮度的条件下放大视讯信号,而IRIS能在高亮度下降低光线进入摄影机,马达光圈控制能被CCD IRIS 控制所取代。
3. AGC (Automatic Gain Control) :一种电路能自动地调整视讯信号的电子放大,来补偿因照明亮度位阶的改变。
4. Aspect Ratio:表示影像的长宽比例,标准TV影像是4:3,宽视野是16:9。
5. ATW(Auto Tracking White Balance) :在ATW模式下,白平衡会依被照体的色温不同一直被连续调整。
6. Backlight Compensation:在AE模式下的一种特别补偿功能。
当背景太亮或是物体太暗时背光补偿功能就会去修改自动曝光的动作使得物体更清晰。
7. Bayonet Mount:一种摄影机的mount,介于镜头后面mounting面和摄影机的CCD面的距离: 有38mm 或48mm。
8. C-mount:一种摄影机的mount,在镜头后面mounting面到摄影机的CCD 面距离为17.526mm是聚焦清楚的。
9. CCD (Charge Coupled Devices) :个别光感应组件(称为Pixels)组合成矩阵或线形式的半导体装置,光学镜头把影像聚在此Sensor 上,每一个Pixels累积和光成正比的电荷,然后传送读出。
输出矩阵大小是感光元矩阵的一半就是interlace 模式CCD,如是相同大小就是Progressive Scan CCD。