基于视频的车辆检测技术
- 格式:ppt
- 大小:3.38 MB
- 文档页数:37
基于OpenCV的视频道路车辆检测与跟踪近年来,智能驾驶技术飞速进步,视频道路车辆检测与跟踪技术成为了分外重要的探究方向之一。
OpenCV是一个广泛应用于计算机视觉领域的开源库,可以提供各种强大的图像处理和分析功能。
本文将介绍技术,并展示其在智能交通系统中的应用。
1. 引言在智能交通系统中,视频监控系统可以实时得到道路上的交通信息,并援助提高交通安全性和效率。
其中,车辆检测与跟踪是视频监控系统中一个重要的环节。
本文将使用OpenCV实现车辆检测与跟踪算法,并探讨其在实际应用中的效果和问题。
2. 车辆检测车辆检测是智能交通系统中关键的一环。
起首,需要将视频图像进行预处理,包括去噪、图像增强和尺寸归一化等。
接下来,可以使用机器进修算法或深度进修算法训练一个目标检测模型,来检测图像中的车辆位置。
其中,传统的机器进修算法如Haar特征分类器、HOG+SVM等已经被证明有效。
此外,深度进修算法如YOLO、Faster R-CNN等也能够在车辆检测任务中取得不俗效果。
3. 车辆跟踪车辆跟踪是在车辆检测的基础上,通过追踪连续的视频帧来实现对车辆的跟踪。
在OpenCV中,有多种跟踪算法可供选择,如均值漂移、卡尔曼滤波、基于流的光流跟踪等。
这些算法可以依据车辆的运动特点和场景要求,选择最适合的算法进行车辆跟踪。
4. 算法实现与优化基于OpenCV,可以通过编程实现车辆检测与跟踪算法。
在实现过程中,需要注意优化算法的效率和准确性。
起首,可以通过图像金字塔技术来提高算法的检测和跟踪速度。
其次,可以利用GPU加速和多线程技术来提高算法的处理速度。
此外,还可以借助OpenCL等并行计算框架来加速算法的执行。
5. 试验与结果分析为了验证基于OpenCV的车辆检测与跟踪技术的有效性,进行了一系列试验。
试验数据包括不同场景下的道路视频,通过与手动标注的真值进行比较,评估了算法的检测准确度和跟踪精度。
试验结果表明,基于OpenCV的车辆检测与跟踪技术在不同场景下都具备一定的检测和跟踪能力。
几种主流的交通流量检测方案的比较目前市场上主要的交通流量检测手段有:环形线圈、微波检测、视频检测,无线地磁检测等其他检测器,下面我们逐个来分析其优缺点。
1、基于线圈技术原理:以金属环形线圈埋设于路面下,利用车辆经过线圈区域时因车身铁材料所造成的电感量的变化来探测车辆的存在。
该探测技术可测车速,车流量,占有率等基本交通信息参数,但是不能多车道同时探测。
安装:埋设式。
在路面开一条深槽,将探测线圈埋入其中,信息处理部分安装于路边的控制箱。
优点:首次投资较少、准确度高、不受气候和光照等外界条件影响。
缺点:安装与维修因为需要中断交通、破坏路面而变得很复杂,加上车辆重压等因素导致寿命不长,因而维护成本很高。
另外特殊路段如桥梁、隧道等难以安装。
技术:最简单也最成熟应用成本:首次投资相对较少,维护成本极高。
应用范围:可应用于除不能破坏路面情况外的所有地方。
与其他系统的兼容性:与交通信号灯控制系统兼容性很好,但是与基于其它技术的交通信息采集系统的兼容性较差。
目前常规的线圈交通信息检测系统信息传输采用的是轮循,而基于其它技术的系统主要采用的是主动上报的方式。
2、基于视频技术原理:使用计算机视频技术检测交通信息,通过视频摄象头和计算机模仿人眼的功能,在视频范围内划定虚拟线圈,车辆进入检测区域使背景灰度发生变化,从而感知车辆的存在,并以此检测车辆的流量和速度。
该探测技术可测车速,车流量,占有率等基本交通信息参数,但是难以实现很多车道同时探测。
安装:正向安装于龙门架或者L型横梁上。
优点:在气候和光照等外界条件理想的情况下准确度高。
缺点:极易受气候和光照等外界条件等影响,因为需要正向安装于龙门架或者L型横梁上而使得安装与维修变得很复杂。
技术:不成熟,主要问题是要克服外界条件的影响。
应用成本:首次投资相对线圈要高,但是维护成本很低。
应用范围:可应用于能架设龙门架或者L型横梁的所有地方。
与其他系统的兼容性:好。
3、基于微波雷达技术基于微波雷达技术的交通信息采集系统可分为侧向安装与正向安装2种。
智能交通系统中基于视频的车辆检测方法智能交通系统的快速发展和应用,改变了我们对城市交通的认识和管理方式。
在这个系统中,车辆检测是一个关键的环节,它对实现智能交通管理、提高交通效率和安全性起着至关重要的作用。
视频技术作为智能交通系统中最常用的一种检测方法之一,以其高效、准确和实时性成为了车辆检测的首选方法之一。
基于视频的车辆检测方法可以分为两个主要步骤:前景提取和车辆检测与跟踪。
前景提取通过对视频图像的对比度、颜色、运动等特征进行分析,将前景目标与背景进行区分。
常见的前景提取算法包括帧差法、背景减除法和光流法等。
其中,背景减除法是最常用的一种方法,它通过建立背景模型来动态地更新背景图像,从而准确地提取前景目标。
在前景提取的基础上,车辆检测与跟踪是接下来的关键步骤。
车辆检测与跟踪的目标是在前景目标中准确地识别和跟踪车辆,并将其与其他非车辆目标进行区分。
传统的车辆检测方法主要依赖于图像处理技术,如边缘检测、灰度变换和形态学处理等。
然而,由于车辆的形状和外观的多样性,传统方法往往存在一定的局限性和缺陷。
为了克服传统方法的局限性,近年来,基于深度学习的车辆检测与跟踪方法得到了广泛的应用。
深度学习技术以其强大的特征学习能力和自适应性在图像处理领域取得了巨大的成功。
基于深度学习的车辆检测方法主要包括两个关键步骤:特征学习和目标检测。
特征学习利用深度神经网络自动地学习和提取图像中的有用特征,将其转化为高级语义特征。
目标检测利用训练好的深度神经网络对特征图进行目标识别和位置定位,实现对车辆的准确检测与跟踪。
除了基于深度学习的方法,基于视频的车辆检测还可以结合其他传感器和技术,如雷达、红外传感器和激光雷达等。
这些传感器可以提供关于车辆位置、速度、方向等更详细和全面的信息,从而提高车辆检测的准确性和鲁棒性。
例如,激光雷达可以通过测量反射激光束的时间和强度来准确地检测车辆及其周围环境,同时还可以避免遮挡和光照条件的影响。
基于视频监控的交通拥堵检测与分析模型研究现代城市交通拥堵问题日益普遍,给人们的出行带来了很大的困扰。
为了有效地解决交通拥堵问题,研究人员提出了基于视频监控的交通拥堵检测与分析模型。
本文将深入探讨这一模型的研究。
在交通拥堵检测与分析模型的研究中,视频监控被广泛运用。
通过视频监控可以获取交通路口、高速公路等瓶颈区域的交通情况,进而进行拥堵检测与分析。
在这一模型中,主要包含以下几个关键步骤:视频数据采集、车辆检测与跟踪、拥堵检测与分析。
首先,视频数据采集是整个模型的基础。
通过安装摄像头等设备,采集交通路口、高速公路等瓶颈区域的实时视频数据。
这些视频数据将成为后续车辆检测与拥堵分析的重要数据源。
接下来是车辆检测与跟踪。
针对采集到的视频数据,需要经过图像处理技术进行车辆检测与跟踪。
车辆检测是指在视频中准确地识别出车辆的位置,而车辆跟踪则是能够持续追踪车辆的运动轨迹。
通过车辆检测与跟踪,可以得到交通路口或高速公路上车辆的数量、位置和速度等信息。
最关键的一步是拥堵检测与分析。
通过分析车辆的运动轨迹和速度,可以判断是否存在交通拥堵的情况。
例如,在交通路口,如果车辆在一段时间内停留在同一个位置,或者速度明显变慢,那么就可以判断该路口存在交通拥堵。
在高速公路上,如果车辆的密度过高,速度过慢,也可以判断存在交通拥堵。
通过拥堵检测与分析,可以及时发现交通拥堵情况,并且提供相应的解决方案。
基于视频监控的交通拥堵检测与分析模型的研究有着广泛的应用价值。
首先,可以为城市交通管理部门提供准确的交通拥堵情况,帮助他们制定相应的交通调度方案,缓解交通拥堵问题。
其次,也可以为驾驶人提供实时的交通拥堵信息,帮助他们选择最佳的出行路线,提高出行效率。
此外,这一模型还可以与其他交通管理系统结合,形成一个完整的智能交通管理系统,实现交通治理的智能化、高效化。
然而,基于视频监控的交通拥堵检测与分析模型也存在一些挑战和限制。
首先,视频数据的采集需要投入大量的人力和物力,并且需要克服天气、环境等因素的干扰。
摘要当今科技飞速发展,带来了智能交通的空前发达,也为经济可持续发展做出一定贡献。
交通运输在一个国家的经济社会发展中起着助推器的作用。
交通运输的监控与管理智能化也变得尤为重要。
基于视频的车辆检测作为智能交通系统的基石,具有直观性、大范围检测、安装和维护方便等优势,成为采集交通信息技术的有力工具。
因而视频车辆检测研究具有非常重要的意义。
本论文首先介绍了图像检测的研究背景以及发展情况,然后重点介绍了本论文中进行车辆检测的技术和方法。
该方法先对图像进行灰度值化处理,中值滤波处理及二值化处理,然后利用车辆移动的特点进行检测,最后将移动中的车辆进行加框标记。
实验结果表明, 本程序设计能够在一定的误差范围内实现对移动车辆进行检测。
且效果良好。
本文视频车辆检测系统是采用图像处理的方法进行设计,本研究有着一定的现实意义。
关键词:智能交通;车辆检测;图像处理;MATLABAbstractToday, science and technology develop quickly. And it make Intelligent Transportation System was more developed. It has also made a certain contribution for the sustainable development of economy. Transportation plays the role of booster in economic and social development of a country. It is important that make monitoring and management of transportation to be more intelligence. Vehicle Detection System that bases on the video is footstone of Intelligent Transportation System. It can watch easily. It can do a large-scale detection. And its installation and maintenance is convenient. It will be a helpful tool of collecting the information of traffic. So it has an important meaning for researching the detection of vehicles.This dissertation introduces the background of the research and the development of the situation. Than introduces the technology and method of Vehicle Detection System detailed. The method is to make the image gray processing, median processing and binary image processing at the first. Using the characteristics of vehicle moving detects vehicles at the second. Finally, sign frames on vehicles. The experimental results show that the program can detect the moving vehicles within a certain range of error and has good result.This Vehicle Detection System that bases on the video designed with the technology of image processing. It is of practical significance in this research.Key words:intelligent transportation; vehicle detection; image processing; MATLAB目录摘要 (I)Abstract (II)目录 (III)1 绪论 (1)1.1 课题背景与意义 (1)1.2 国内发展概况 (1)1.3 视频车辆检测系统概述 (2)1.4 图像处理概述 (3)1.5 本课题工作与结构安排 (3)1.6 开发工具及运行环境 (4)2 软件介绍 (5)2.1 MATLAB 概况 (5)2.2 MATLAB的语言特点 (6)2.3 基本运算与函数 (7)3 基于视频的车辆检测方法 (15)3.1 基于视频的车辆检测方法 (15)3.1.1 基于帧间差分的方法 (15)3.1.2 基于光流场的方法 (15)3.1.3 基于背景差的方法 (16)3.2 车辆阴影分割技术 (16)4 车辆目标的图像处理方法 (17)4.1 彩色图像灰度化 (17)4.2 图像分割 (19)4.2.1 阈值分割方法 (19)4.2.2 最大方差自动取阈值(自适应二值化) (19)4.2.3 基于边缘检测的图像分割 (22)4.3 基于数学形态学分析 (24)4.3.1 图像形态学处理 (24)4.3.2 实验结果比较 (26)4.4 图像填充 (27)5 基于帧间差分法的车辆检测盒计数方法 (29)5.1 帧间差分法 (29)5.2 二值化 (29)5.3 形态学滤波 (30)5.4 系统流程图 (31)5.5 分析目标物体和计数 (32)6 结论与展望 (35)6.1 结论 (35)6.2 不足之处与对未来的展望 (35)致谢 (37)参考文献 (38)附录 (39)基于视频的车辆检测系统1 绪论1.1 课题背景与意义当今科技飞速发展,带来了智能交通的空前发达,也为经济可持续发展做出一定贡献。
智能交通系统的视频监控分析与车辆识别方法随着城市化进程的不断加快,交通拥堵成为城市发展的一大难题。
为了解决这一问题,智能交通系统应运而生。
智能交通系统利用现代信息技术,通过视频监控和车辆识别方法,对交通流量、行驶状态等进行实时监测和分析,从而提供基于数据的智能交通管理解决方案。
本文将重点介绍智能交通系统中的视频监控分析与车辆识别方法。
视频监控是智能交通系统中的重要组成部分。
它通过摄像机对交通路段进行连续拍摄,并将采集到的视频信号传输到监控中心进行处理。
视频监控分析主要包括目标检测、目标跟踪和目标识别等步骤。
目标检测是视频监控分析中的第一步。
它旨在从视频中检测出交通场景中的车辆。
目标检测通常通过使用计算机视觉和机器学习的方法来实现。
目前比较常用的目标检测算法包括基于图像特征的方法(如Haar特征和HOG特征)和基于深度学习的方法(如卷积神经网络)。
这些算法可以对交通场景中的前景目标进行检测,并生成目标的位置和边界框。
目标跟踪是视频监控分析中的第二步。
它旨在在连续的视频帧中跟踪目标的运动轨迹。
目标跟踪算法通常应用于目标检测的结果,将静态的目标转变为动态的轨迹。
常用的目标跟踪算法包括卡尔曼滤波器、粒子滤波器和相关滤波器等。
这些算法可以根据目标的运动模型和观测信息,实时估计目标的位置和速度。
目标识别是视频监控分析中的最后一步。
它旨在识别目标的类别和属性。
目标识别算法通常根据目标的外观和结构特征进行分类。
常见的目标识别算法包括支持向量机、隐马尔可夫模型和卷积神经网络等。
这些算法可以对车辆进行分类,识别出车辆的类型(如轿车、卡车、摩托车等)和属性(如品牌、颜色等)。
车辆识别是智能交通系统中的关键技术,它为交通管理提供了重要的数据支持。
车辆识别通过对交通场景中的车辆进行特征提取和分类判别,实现对车辆的自动识别。
车辆识别方法主要包括基于特征的方法和基于深度学习的方法。
基于特征的方法是传统的车辆识别方法,它依靠提取车辆的形状、纹理和颜色等特征进行分类。
智能交通系统中基于视频的行车轨迹检测与跟踪智能交通系统是目前城市交通管理中的一项重要领域,其发展为交通管理提供了更多的可能性和创新思路。
在智能交通系统中,基于视频的行车轨迹检测与跟踪是一项关键技术,能够实时监测和分析道路上的车辆行为,为交通管理和安全提供有力支持。
行车轨迹检测是指通过视频图像处理和计算机视觉技术,检测和提取车辆在道路上的轨迹信息。
首先,系统会拍摄道路的视频,并将其传输到图像处理算法中进行处理。
然后,通过图像处理技术,系统能够自动检测和识别车辆在图像中的位置和行进方向,构建车辆行驶的轨迹。
最后,系统会将提取的轨迹信息传输给交通管理中心,以供进一步分析和决策。
在行车轨迹检测中,图像处理算法起着关键作用。
传统的图像处理算法通常基于特征提取和匹配的方法,但由于车辆在行驶过程中存在多种变化因素,例如光照变化、道路状况等,这些方法往往难以满足实际应用的需求。
因此,近年来,深度学习技术的发展为行车轨迹检测带来了新的可能性。
深度学习技术通过构建深度神经网络模型,能够自动从原始数据中学习和提取特征,进一步实现对车辆行驶轨迹的准确检测。
通过使用卷积神经网络和循环神经网络等模型,可以较好地处理光照变化、遮挡以及道路状况复杂的情况。
此外,通过引入目标检测技术,系统能够准确地辨别图像中的车辆,并进行轨迹的跟踪。
在行车轨迹跟踪中,跟踪算法需要处理车辆在行驶过程中的位置变化、速度变化以及与其他车辆的相互关系。
传统的跟踪算法通常基于运动模型和特征匹配的方法,但由于车辆行驶过程中的复杂情况,这些方法的鲁棒性和准确性存在一定局限性。
因此,近年来出现了多种基于深度学习的跟踪算法。
基于深度学习的跟踪算法通过将视频序列作为输入,结合卷积神经网络和循环神经网络,能够实现对车辆轨迹的实时跟踪。
通过学习和提取视频序列中的特征,系统能够实时预测车辆的位置变化和速度变化,并对车辆进行准确的跟踪。
此外,通过引入目标关联技术,系统能够自动对多个车辆进行跟踪,并实现对车辆间的相互关系的建模。
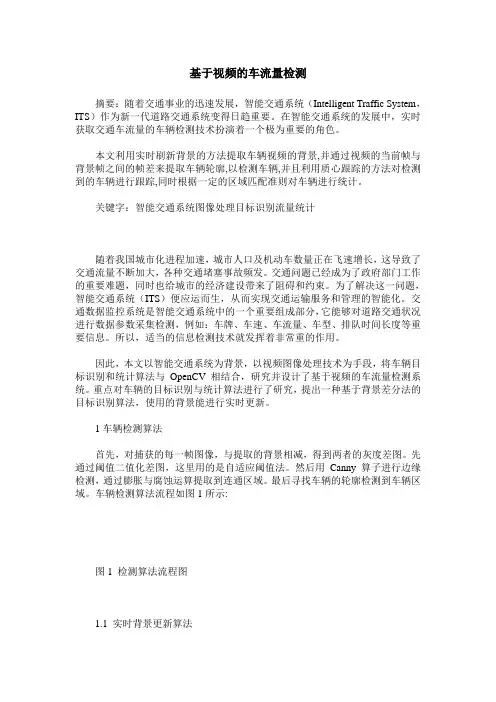
基于视频的车流量检测摘要:随着交通事业的迅速发展,智能交通系统(Intelligent Traffic System,ITS)作为新一代道路交通系统变得日趋重要。
在智能交通系统的发展中,实时获取交通车流量的车辆检测技术扮演着一个极为重要的角色。
本文利用实时刷新背景的方法提取车辆视频的背景,并通过视频的当前帧与背景帧之间的帧差来提取车辆轮廓,以检测车辆,并且利用质心跟踪的方法对检测到的车辆进行跟踪,同时根据一定的区域匹配准则对车辆进行统计。
关键字:智能交通系统图像处理目标识别流量统计随着我国城市化进程加速,城市人口及机动车数量正在飞速增长,这导致了交通流量不断加大,各种交通堵塞事故频发。
交通问题已经成为了政府部门工作的重要难题,同时也给城市的经济建设带来了阻碍和约束。
为了解决这一问题,智能交通系统(ITS)便应运而生,从而实现交通运输服务和管理的智能化。
交通数据监控系统是智能交通系统中的一个重要组成部分,它能够对道路交通状况进行数据参数采集检测,例如:车牌、车速、车流量、车型、排队时间长度等重要信息。
所以,适当的信息检测技术就发挥着非常重的作用。
因此,本文以智能交通系统为背景,以视频图像处理技术为手段,将车辆目标识别和统计算法与OpenCV相结合,研究并设计了基于视频的车流量检测系统。
重点对车辆的目标识别与统计算法进行了研究,提出一种基于背景差分法的目标识别算法,使用的背景能进行实时更新。
1车辆检测算法首先,对捕获的每一帧图像,与提取的背景相减,得到两者的灰度差图。
先通过阈值二值化差图,这里用的是自适应阈值法。
然后用Canny算子进行边缘检测,通过膨胀与腐蚀运算提取到连通区域。
最后寻找车辆的轮廓检测到车辆区域。
车辆检测算法流程如图1所示:图1 检测算法流程图1.1 实时背景更新算法为了能够更加准确的检测到运动目标,就要使背景图像随着当前帧图像的背景变化而变化,即实时背景更新[1]。
图像背景是在图像序列中的灰度值基本不变化或者变化很小的像素。
基于视频图像的车辆速度检测技术研究的开题报告一、选题背景和意义车辆速度检测技术在交通管理和公路安全方面具有重要意义。
目前,车辆速度检测的方法主要有雷达测速和摄像头测速两种方式,其中摄像头测速技术由于其准确性和灵活性等优势,在实际应用中的地位越来越重要。
本课题旨在研究基于视频图像的车辆速度检测技术,通过对视频图像的处理和分析,提取车辆运动特征,计算车速,实现对车辆速度的准确检测。
二、研究内容(1)视频图像预处理:在摄像头拍摄的视频中,由于光照、天气等因素的影响,视频中的图像常常包含噪声和干扰。
因此,需要对视频图像进行预处理,包括噪声去除、图像增强等步骤。
(2)车辆运动特征提取:通过分析视频图像中车辆运动轨迹和运动状态,提取车辆行驶的方向、速度等特征。
(3)车辆速度计算:结合车辆运动特征,利用数学方法和图像处理技术,计算车辆行驶速度。
(4)车辆速度检测系统设计:基于上述步骤,设计并实现基于视频图像的车辆速度检测系统,包括视频采集、预处理、特征提取、速度计算和结果输出等功能。
三、研究方法本项目的研究方法包括理论研究和实验研究两个方面。
理论研究主要是通过文献调研和相关领域的知识积累,深入掌握基于视频图像的车辆速度检测技术的理论基础和实现方法。
实验研究主要是通过编写程序和使用相关软件来实现车辆速度检测系统,并对系统进行性能测试和数据分析。
四、预期成果本项目的预期成果包括以下几个方面:(1)基于视频图像的车辆速度检测技术研究报告。
(2)基于视频图像的车辆速度检测系统的设计和实现。
(3)数据分析和性能测试报告,对系统的精度、稳定性、实时性等进行评价。
五、进度安排本项目的时间安排如下:(1)第1-2个月:开展文献综述和理论研究,深入了解基于视频图像的车辆速度检测技术。
(2)第3-4个月:熟练掌握相关软件和技术工具,进行实验研究并对数据进行分析。
(3)第5-6个月:对系统进行性能测试和调试,并不断优化系统的设计和实现。
智能交通系统中基于视频的车辆检测技术运用摘要:与传统的车辆检测器相比,基于视频图像处理与视觉技术的车辆检测器具有处理速度快、安装维护便捷且费用较低、可监视范围广、可获取更多种类的交通参数等诸多优点,因而近年来在智能交通系统(ITS)中得到了越来越广泛的应用。
针对摄像头拍摄得到的交通序列图像,人们提出了很多视频图像处理和分析技术,其中最基本的研究领域就是交通场景中车辆对象的检测与跟踪。
介绍了近年来提出的一些主要的车辆检测与跟踪技术,并根据核心处理方法(基于特征、区域或模型等)及处理域(空域、时域)的不同对这些技术进行了分类,同时分析比较了各种方法的优缺点。
最后,说明了这一领域仍然存在的问题和对可能的研究方向进行了一定的预测。
关键词:智能交通系统;交通监视系统;车辆检测随着经济的快速发展,人们的生活水平的逐渐提高,交通拥堵和违章驾驶等方面给人们的出行带来不便,越来越多的交通事故在发生,所以,视频技术在智能交通系统中的应用给交通提供了另一条新的道路。
1、关键技术1.1图像采集技术图像和视频的采集是视频技术应用的一个关键的前提。
通常均采用“摄像机 +视频采集卡”的方法实现实时图像序列采集。
早先个别场合采用的“数码相机”方式,具有对光线适应性强、图像质量相对较高的优点,但因为无法高速实时处理大量的图像数据,越来越不适合ITS系统要求。
“摄像机+ 视频采集卡”的体系,由于低照度、高灵敏度的摄像机的普遍采用,已经占据了图像采集传感器的首选地位。
采集卡方面,目前比较先进的图像采集卡是支持多路、多卡的高分辨率实时采集卡,其中集成了常用的视频压缩功能,包括 JPEG、MPEG 及AVI 等。
1.2城市交通智能监控(1)智能录像传统的交通监控录像是指对监控区域进行持续的连续图像采集,并将获取的数据以某种压缩格式(如 JPEG 或 MPEG 等)保存下来。
在这一过程中,通常不对数据作任何分析和解剖,这样带来的后果是数据量极大。
收稿日期5作者简介男,6年生,讲师,张家口市,5基金项目年张家口市科学技术研究与发展指导计划项目(3B)基于视频序列的车辆检测与跟踪算法研究与应用王剑雄王玉兰张建梅孙志田洪斌孙皓月河北建筑工程学院摘要提出了一种基于区域的模板匹配跟踪算法,针对复杂场景中目标被干扰、遮挡等情况,提出了一种基于遮挡判断和运动轨迹预测的抗遮挡跟踪算法,可实现对被干扰或遮挡的目标进行有效跟踪,文中给出仿真结果,证明了该算法的有效性和实用性.关键词模板匹配;车辆检测;背景差分;车辆跟踪中图分类号TP3911算法简介计算机视觉就是利用各种成像系统代替视觉器官作为视觉信息输入手段,由计算机来代替大脑完成处理和解释.计算机视觉不仅能使机器感知环境中的几何信息,包括位置、大小、形状、运动等,还能对它们进行描述、解释和理解.计算机视觉技术为交通系统提供了直观方便的分析手段,交通环境中的大量信息,如车辆、交通标志和路面标识等都源于视觉.用计算机视觉来处理和理解这些信息成为一种必然的选择.在跟踪的过程中,由于车辆交错、气候与时差及人为干扰等会对跟踪的目标产生图像灰度差别太大或短暂部分或全部遮挡.在这种情况下,要求目标跟踪系统应具有一定的鲁棒性,能够自动调整天气和时差带来的图像灰度影响,以及在短暂遮挡过后,能够重新捕获目标,维持目标的跟踪.因此,要求跟踪系统应具备以下能力:能够自动调整光线太强或太弱给追踪目标成像带来的不利影响;能够自动消除下雨或下雪等气候带来的随机噪声;部分遮挡时对目标进行预测的能力.当跟踪车辆处于车流辆较密集的时侯,很难用某种方法将其与背景分割开来.此时,可以选择基于区域相关匹配的跟踪方法,它的原理是不需要将目标与背景分离出来,而是把目标整体或目标区域作为一个整体,通过区域之间的相似性度量对目标实施有效跟踪.它的突出优点是原理简单,执行效率高,满足光电侦察设备的实时性和实用性要求.针对上述情况,本文提出了一种抗气候、抗时差、抗遮挡的跟踪算法,可实现全天候的机动车辆或其它地面目标进行有效跟踪,具体算法步骤如下:图像的去噪处理;图像的灰度调整;采用基于区域匹配的方法对目标进行跟踪;采用图像相关置信度对目标进行遮挡判断;判断目标如可能认为遮挡,则调整原来模板的局部区域作为新的模板重新匹配.2基于灰度的模板匹配算法运动目标检测依据前景目标所处的背景环境,可以划分为两类,静态背景下的运动目标检测和动态背景下的运动目标检测.本文主要研究摄像机不发生运动的静态背景运动目标检测.运动目标检测结果的好坏直接关系到整个系统的优劣.好的运动目标检测算法应能准确地检测到运动目标、而且能适应各种监控环境、有较强的抗干扰性以及处理速度快等特点.本文采用基于区域匹配的方法对目标进行跟踪,跟踪系统采用相关跟踪作为目标图像跟踪的基本手段.如何在规定的场景环境中,精确、实时地完成目标区域跟踪任务是设计的目的.模板匹配是指用一个较小的图像,即模板与源图像进行比较,以确定在源图像中是否存在与该模板相同或相似的区域,若该区域存在,还可确定其位置并提取该区域.第28卷第4期2010年12月河北建筑工程学院学报JOU RNA L OF HEBEI INSTITU TE OF ARCHITECTURE AND CIVIL ENGINEERIN G Vol 28No 4Dec.2010:2010-08-2:19707024:2009092100模板匹配常用的一种测度为模板与源图像对应区域的误差平方和.设f(x,y)为MN 的源图像,t (j,k)为J K(J M,K N)的模板图像,则误差平方和测度定义为公式(1),D(x,y)=J -1j=0K-1k=0[f (x +j ,y +k)-t(j ,k)]2(1)由上式展开可得公式(2),D(x,y)=J -1j=0K-1k =0[f (x +j,y +k)]2-2J -1j K-1k t (j,k)f (x +j ,y +k)+J -1j=0K-1k=0[t(j ,k)]2(2)令DS(x,y)为公式(3),DST (x,y)为公式(4),DT(x,y)为公式(5),DS(x,y)=J-1j=0K-1k=0[f (x +j ,y +k)]2(3)DST (x,y)=2J -1j=0K-1k=0[t(j ,k)f (x +j,y +k)](4)DT (x ,y)=J -1j=0K-1k=0[t(j ,k)]2(5)公式(3)中DS(x,y)称为源图像中与模板对应区域的能量,它与像素位置(x,y)有关,但随像素位置(x,y)的变化,DS(x,y)变化缓慢.公式(4)中DST (x,y)模板与源图像对应区域的互相关,它随像素位置(x,y)的变化而变化,当模板t(j,k)和源图像中对应区域相匹配时取最大值.公式(5)中DT (x,y)称为模板的能量,它与图像像素位置(x,y)无关,只用一次计算便可.显然,计算误差平方和测度可以减少计算量.基于上述分析,若设DS(x,y)也为常数,则用DST (x,y)便可进行图像匹配,当DST (x,y)取最大值时,便可认为模板与图像是匹配的.但假设DS(x,y)为常数会产生误差,严重时将无法进行匹配,因此可用归一化互相关R(x,y)作为误差平方和测度,其定义为公式(6),R(x,y)=J -1j=0K-1k =0t(j ,k)f (x +j,y +k)J-1j =0K-1k=0[f (x +j,y +k)]J -1j=0K-1k =0[t(j ,k)]2(6)模板匹配如图1所示,其中假设源图像f(x,y)和模板图像t(j,k)的原点都在左上角.对任何一个f (x,y)中的(x,y),根据上式都可以算得一个R(x,y).当x 和y 变化时,t(j,k)在源图像区域中移动并得出R(x,y)所有值.R(x,y)的最大值指出了与t(j,k)匹配的最佳位置,若从该位置开始在源图像中取出与模板大小相同的一个区域,便可得到匹配图像.图1模板匹配示意图3为减少计算量,提高跟踪的速度,采用先粗后精的相关跟踪算法在获得图像数据后,先用模板在图像中进行粗匹配匹配搜索采用隔行隔列的方式进行(即当搜索区为大小时,粗匹配需要计算55个点位置上的相关匹配值,结果保留匹配中最小的五个相关匹配值的点坐标69第4期王剑雄王玉兰张建梅等基于视频序列的车辆检测与跟踪算法研究与应用.10010000.在图像中分别以粗匹配得到的五个最小的相关匹配点为中心,在其33邻域内进行精匹配,即计算45个点,并比较精匹配结果,得到最小匹配值的点位置,即为正常跟踪点坐标.当判断出目标被遮挡后,表明当前图像跟踪运算的结果不可信,判断目标如可能认为遮挡,则调整原来模板的局部区域作为新的模板重新匹配.4仿真结果使用Matlab70高级语言编程,对上述算法进行了仿真测试.测试图像是用数码相机拍摄的街道背景和车辆目标,如图2所示,把它作为模板匹配原图.又在正常行驶的道路上拍摄图3和图4作为测试图,图4中车辆目标在路口转弯过程中,被树木遮挡一部分,经过了遮挡判断后对目标也能准确检测.仿真测试非常理想,不管遮挡与否都能准确识别出来,本文用矩形的线框标于图3和图4上.图2图3图45结论仿真测试的情况表明,本算法不仅能够在正常情况下对复杂场景下运动目标进行稳定的跟踪,而且能够有效地对目标遮挡做出判断,对目标运动进行较准确的预测,对于复杂背景图像中被遮挡目标的跟踪具有良好的效果.该算法在实际的可实现性和实时性方面,都已经具备了工程实用的要求.参考文献[1]李熙莹.一种自动提取目标的主动轮廓法.光子学报,2002,31[2]常发亮,刘雪,王华杰.基于均值漂移与卡尔曼滤波的目标跟踪算法.计算机工程与应用,2007,43(12)[3]张昊,黄战华等,基于差分图像的运动目标跟踪与分割方法的应用研究.光学技术,2005,4[4]张素兵,刘泽民.基于蚂蚁算法的时延受限分布式多播路由研究.通信学报,2001,22(3):70~74[5]T B ,R M ,X G I V f f x f I ,3~(下转第页)E.errance oult oss J.ieheals iang ao.nto t he wood:isual surveillance o noncooper ative and camou laged targets comple out door setings.Pr oceedings o the EEE.200189:182140274Sequence Controlling System of Hydrogen AnnealingFurnace Based on PLCShi Shu zhen g1,Liu D ongxin2,Xu Zhen g3,Lv Y isha41.H ebei Institute of Architectur e and Civil Eneginneering;2.Hengshui Economic and Applicable H ousing Development Center;3.Xuanhua Steel Co.Lt d;4.Zhangjiakou Tobacco M onopoly Ber eauAbstr act Annealing furnace is the important equipment with is used for mental strips and bright an nealed wire.According to the application of hydrogen annealing fur nace,we mainly developed PLC sequence contr olling system which can meet the requirement of controlling system.Key words the hydrogen annealing furnace;sequence control;PLC(上接第70页)Research and Application of Vehicle Detection andTracking Algorithms Based on Video SequenceWa ng J ian xion g,Wan g Y u lan,Zhan g J ian m ei,Sun Zhi tia n,Hon g Bin,Sun Ha oyu eH ebei Institute of Architectur e and Civil Engineer ingAbstr act T his paper puts forward a method based on regional template matching algorithm.Accord ing to such complex scene as the interference and block of target,it is proposed based on block and forecast of trajector y tracking algorithm,which can achieve the effective algorithm to the inter fered or block tar get.The simulation results are given to show the effectiveness and practicalness of the method.Key words template matching;vehicle detection;background subtraction;vehicle tracking。