二叉排序树查找算法
- 格式:doc
- 大小:30.00 KB
- 文档页数:1
五种查找算法总结一、顺序查找条件:无序或有序队列。
原理:按顺序比较每个元素,直到找到关键字为止。
时间复杂度:O(n)二、二分查找(折半查找)条件:有序数组原理:查找过程从数组的中间元素开始,如果中间元素正好是要查找的元素,则搜素过程结束;如果某一特定元素大于或者小于中间元素,则在数组大于或小于中间元素的那一半中查找,而且跟开始一样从中间元素开始比较。
如果在某一步骤数组为空,则代表找不到。
这种搜索算法每一次比较都使搜索范围缩小一半。
时间复杂度:O(logn)三、二叉排序树查找条件:先创建二叉排序树:1. 若它的左子树不空,则左子树上所有结点的值均小于它的根结点的值;2. 若它的右子树不空,则右子树上所有结点的值均大于它的根结点的值;3. 它的左、右子树也分别为二叉排序树。
原理:在二叉查找树b中查找x的过程为:1. 若b是空树,则搜索失败,否则:2. 若x等于b的根节点的数据域之值,则查找成功;否则:3. 若x小于b的根节点的数据域之值,则搜索左子树;否则:4. 查找右子树。
时间复杂度:四、哈希表法(散列表)条件:先创建哈希表(散列表)原理:根据键值方式(Key value)进行查找,通过散列函数,定位数据元素。
时间复杂度:几乎是O(1),取决于产生冲突的多少。
五、分块查找原理:将n个数据元素"按块有序"划分为m块(m ≤ n)。
每一块中的结点不必有序,但块与块之间必须"按块有序";即第1块中任一元素的关键字都必须小于第2块中任一元素的关键字;而第2块中任一元素又都必须小于第3块中的任一元素,……。
然后使用二分查找及顺序查找。
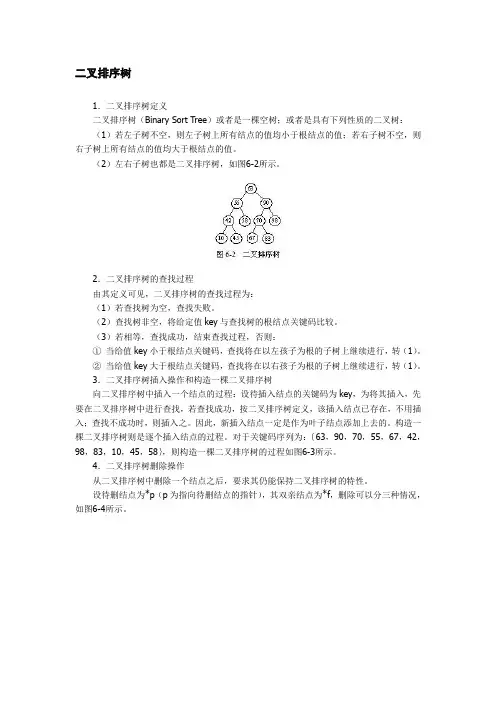
二叉排序树1.二叉排序树定义二叉排序树(Binary Sort Tree)或者是一棵空树;或者是具有下列性质的二叉树:(1)若左子树不空,则左子树上所有结点的值均小于根结点的值;若右子树不空,则右子树上所有结点的值均大于根结点的值。
(2)左右子树也都是二叉排序树,如图6-2所示。
2.二叉排序树的查找过程由其定义可见,二叉排序树的查找过程为:(1)若查找树为空,查找失败。
(2)查找树非空,将给定值key与查找树的根结点关键码比较。
(3)若相等,查找成功,结束查找过程,否则:①当给值key小于根结点关键码,查找将在以左孩子为根的子树上继续进行,转(1)。
②当给值key大于根结点关键码,查找将在以右孩子为根的子树上继续进行,转(1)。
3.二叉排序树插入操作和构造一棵二叉排序树向二叉排序树中插入一个结点的过程:设待插入结点的关键码为key,为将其插入,先要在二叉排序树中进行查找,若查找成功,按二叉排序树定义,该插入结点已存在,不用插入;查找不成功时,则插入之。
因此,新插入结点一定是作为叶子结点添加上去的。
构造一棵二叉排序树则是逐个插入结点的过程。
对于关键码序列为:{63,90,70,55,67,42,98,83,10,45,58},则构造一棵二叉排序树的过程如图6-3所示。
4.二叉排序树删除操作从二叉排序树中删除一个结点之后,要求其仍能保持二叉排序树的特性。
设待删结点为*p(p为指向待删结点的指针),其双亲结点为*f,删除可以分三种情况,如图6-4所示。
(1)*p结点为叶结点,由于删去叶结点后不影响整棵树的特性,所以,只需将被删结点的双亲结点相应指针域改为空指针,如图6-4(a)所示。
(2)*p结点只有右子树或只有左子树,此时,只需将或替换*f结点的*p子树即可,如图6-4(b)、(c)所示。
(3)*p结点既有左子树又有右子树,可按中序遍历保持有序地进行调整,如图6-4(d)、(e)所示。
设删除*p结点前,中序遍历序列为:① P为F的左子女时有:…,Pi子树,P,Pj,S子树,Pk,Sk子树,…,P2,S2子树,P1,S1子树,F,…。
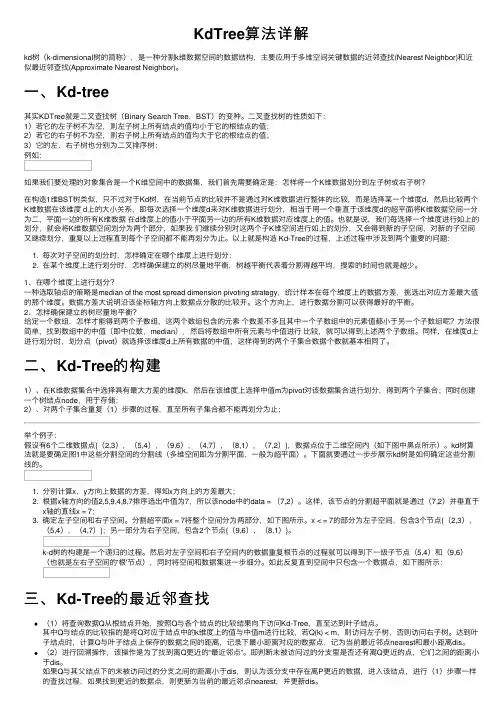
KdTree算法详解kd树(k-dimensional树的简称),是⼀种分割k维数据空间的数据结构,主要应⽤于多维空间关键数据的近邻查找(Nearest Neighbor)和近似最近邻查找(Approximate Nearest Neighbor)。
⼀、Kd-tree其实KDTree就是⼆叉查找树(Binary Search Tree,BST)的变种。
⼆叉查找树的性质如下:1)若它的左⼦树不为空,则左⼦树上所有结点的值均⼩于它的根结点的值;2)若它的右⼦树不为空,则右⼦树上所有结点的值均⼤于它的根结点的值;3)它的左、右⼦树也分别为⼆叉排序树;例如:如果我们要处理的对象集合是⼀个K维空间中的数据集,我们⾸先需要确定是:怎样将⼀个K维数据划分到左⼦树或右⼦树?在构造1维BST树类似,只不过对于Kd树,在当前节点的⽐较并不是通过对K维数据进⾏整体的⽐较,⽽是选择某⼀个维度d,然后⽐较两个K维数据在该维度 d上的⼤⼩关系,即每次选择⼀个维度d来对K维数据进⾏划分,相当于⽤⼀个垂直于该维度d的超平⾯将K维数据空间⼀分为⼆,平⾯⼀边的所有K维数据在d维度上的值⼩于平⾯另⼀边的所有K维数据对应维度上的值。
也就是说,我们每选择⼀个维度进⾏如上的划分,就会将K维数据空间划分为两个部分,如果我们继续分别对这两个⼦K维空间进⾏如上的划分,⼜会得到新的⼦空间,对新的⼦空间⼜继续划分,重复以上过程直到每个⼦空间都不能再划分为⽌。
以上就是构造 Kd-Tree的过程,上述过程中涉及到两个重要的问题:1. 每次对⼦空间的划分时,怎样确定在哪个维度上进⾏划分;2. 在某个维度上进⾏划分时,怎样确保建⽴的树尽量地平衡,树越平衡代表着分割得越平均,搜索的时间也就是越少。
1、在哪个维度上进⾏划分?⼀种选取轴点的策略是median of the most spread dimension pivoting strategy,统计样本在每个维度上的数据⽅差,挑选出对应⽅差最⼤值的那个维度。
二叉排序树查找的递归算法介绍二叉排序树(Binary Search Tree),也称二叉查找树、有序二叉树或排序二叉树,是一种常用的数据结构。
它具有以下特点:•每个节点都包含一个键值和对应的数据。
•左子树中的所有节点的键值都小于根节点的键值。
•右子树中的所有节点的键值都大于根节点的键值。
•左右子树也分别是二叉排序树。
二叉排序树支持高效的查找、插入和删除操作,其中查找操作是利用递归实现的。
本文将详细介绍二叉排序树查找的递归算法。
二叉排序树的定义二叉排序树的定义如下:class TreeNode:def __init__(self, key, data):self.key = keyself.data = dataself.left = Noneself.right = Noneclass BinarySearchTree:def __init__(self):self.root = None在二叉排序树中,每个节点都是一个TreeNode对象,包含键值key和对应的数据data。
left和right分别指向左子树和右子树的根节点。
树的根节点由BinarySearchTree对象的root属性表示。
二叉排序树查找的递归算法二叉排序树的查找操作是利用递归实现的,其具体算法如下:1.如果待查找的键值等于当前节点的键值,返回当前节点的数据。
2.如果待查找的键值小于当前节点的键值,递归在左子树中查找。
3.如果待查找的键值大于当前节点的键值,递归在右子树中查找。
4.如果在左子树或右子树中找不到对应的键值,则返回空。
下面是二叉排序树查找的递归算法的代码实现:def search_recursive(node, key):if node is None or node.key == key:return node.dataelif key < node.key:return search_recursive(node.left, key)else:return search_recursive(node.right, key)在上述代码中,node表示当前节点,key表示待查找的键值。

以二叉树或树作为表的组织形式,称为树表,它是一类动态查找表,不仅适合于数据查找,也适合于表插入和删除操作。
常见的树表:二叉排序树平衡二叉树B-树B+树9.3.1 二叉排序树二叉排序树(简称BST)又称二叉查找(搜索)树,其定义为:二叉排序树或者是空树,或者是满足如下性质(BST性质)的二叉树:❶若它的左子树非空,则左子树上所有节点值(指关键字值)均小于根节点值;❷若它的右子树非空,则右子树上所有节点值均大于根节点值;❸左、右子树本身又各是一棵二叉排序树。
注意:二叉排序树中没有相同关键字的节点。
二叉树结构满足BST性质:节点值约束二叉排序树503080209010854035252388例如:是二叉排序树。
66不试一试二叉排序树的中序遍历序列有什么特点?二叉排序树的节点类型如下:typedef struct node{KeyType key;//关键字项InfoType data;//其他数据域struct node*lchild,*rchild;//左右孩子指针}BSTNode;二叉排序树可看做是一个有序表,所以在二叉排序树上进行查找,和二分查找类似,也是一个逐步缩小查找范围的过程。
1、二叉排序树上的查找Nk< bt->keybtk> bt->key 每一层只和一个节点进行关键字比较!∧∧p查找到p所指节点若k<p->data,并且p->lchild=NULL,查找失败。
若k>p->data,并且p->rchild=NULL,查找失败。
查找失败的情况加上外部节点一个外部节点对应某内部节点的一个NULL指针递归查找算法SearchBST()如下(在二叉排序树bt上查找关键字为k的记录,成功时返回该节点指针,否则返回NULL):BSTNode*SearchBST(BSTNode*bt,KeyType k){if(bt==NULL||bt->key==k)//递归出口return bt;if(k<bt->key)return SearchBST(bt->lchild,k);//在左子树中递归查找elsereturn SearchBST(bt->rchild,k);//在右子树中递归查找}在二叉排序树中插入一个关键字为k的新节点,要保证插入后仍满足BST性质。
平衡树——特点:所有结点左右子树深度差≤1排序树——特点:所有结点―左小右大字典树——由字符串构成的二叉排序树判定树——特点:分支查找树(例如12个球如何只称3次便分出轻重)带权树——特点:路径带权值(例如长度)最优树——是带权路径长度最短的树,又称Huffman树,用途之一是通信中的压缩编码。
1.1 二叉排序树:或是一棵空树;或者是具有如下性质的非空二叉树:(1)若左子树不为空,左子树的所有结点的值均小于根的值;(2)若右子树不为空,右子树的所有结点均大于根的值;(3)它的左右子树也分别为二叉排序树。
例:二叉排序树如图9.7:二叉排序树的查找过程和次优二叉树类似,通常采取二叉链表作为二叉排序树的存储结构。
中序遍历二叉排序树可得到一个关键字的有序序列,一个无序序列可以通过构造一棵二叉排序树变成一个有序序列,构造树的过程即为对无序序列进行排序的过程。
每次插入的新的结点都是二叉排序树上新的叶子结点,在进行插入操作时,不必移动其它结点,只需改动某个结点的指针,由空变为非空即可。
搜索,插入,删除的复杂度等于树高,期望O(logn),最坏O(n)(数列有序,树退化成线性表).虽然二叉排序树的最坏效率是O(n),但它支持动态查询,且有很多改进版的二叉排序树可以使树高为O(logn),如SBT,AVL,红黑树等.故不失为一种好的动态排序方法.2.2 二叉排序树b中查找在二叉排序树b中查找x的过程为:1. 若b是空树,则搜索失败,否则:2. 若x等于b的根节点的数据域之值,则查找成功;否则:3. 若x小于b的根节点的数据域之值,则搜索左子树;否则:4. 查找右子树。
[cpp]view plaincopyprint?1.Status SearchBST(BiTree T, KeyType key, BiTree f, BiTree &p){2. //在根指针T所指二叉排序樹中递归地查找其关键字等于key的数据元素,若查找成功,3. //则指针p指向该数据元素节点,并返回TRUE,否则指针P指向查找路径上访问的4. //最好一个节点并返回FALSE,指针f指向T的双亲,其初始调用值为NULL5. if(!T){ p=f; return FALSE;} //查找不成功6. else if EQ(key, T->data.key) {P=T; return TRUE;} //查找成功7. else if LT(key,T->data.key)8. return SearchBST(T->lchild, key, T, p); //在左子树继续查找9. else return SearchBST(T->rchild, key, T, p); //在右子树继续查找10.}2.3 在二叉排序树插入结点的算法向一个二叉排序树b中插入一个结点s的算法,过程为:1. 若b是空树,则将s所指结点作为根结点插入,否则:2. 若s->data等于b的根结点的数据域之值,则返回,否则:3. 若s->data小于b的根结点的数据域之值,则把s所指结点插入到左子树中,否则:4. 把s所指结点插入到右子树中。
头歌二叉排序表的基本操作一、概述二叉排序树,也称为二叉搜索树(Binary Search Tree, BST),是一种特殊的二叉树,其中每个节点都满足以下性质:对于任意节点,其左子树中所有节点的值都小于该节点的值,而其右子树中所有节点的值都大于该节点的值。
这种特性使得二叉排序树成为一种非常有效的数据结构,用于在各种算法中实现快速查找、插入和删除操作。
二、基本操作1. 插入操作插入操作是二叉排序树中最常用的操作之一。
其基本步骤如下:(1)创建一个新节点,并将要插入的值赋给该节点。
(2)如果二叉排序树为空,则将新节点作为根节点。
(3)否则,从根节点开始比较新节点的值与当前节点的值。
如果新节点的值小于当前节点的值,则将新节点插入到当前节点的左子树中;否则,将新节点插入到当前节点的右子树中。
(4)重复步骤3,直到找到一个空位置来插入新节点。
2. 删除操作删除操作是二叉排序树中比较复杂的操作之一。
其基本步骤如下:(1)找到要删除的节点。
如果找不到要删除的节点,则无法进行删除操作。
(2)如果找到要删除的节点,则将其从树中删除。
如果该节点只有一个子节点,则直接删除该节点;如果该节点有两个子节点,则可以选择将其中的一个子节点“提升”到该节点的位置,然后删除该子节点。
在提升子节点时,需要考虑子节点的值与要删除的节点的值之间的关系,以确保二叉排序树的性质不变。
(3)如果被提升的子节点仍然包含要删除的节点,则需要重复步骤2,直到找到要删除的节点并将其删除。
3. 查找操作查找操作用于在二叉排序树中查找指定的值。
其基本步骤如下:(1)从根节点开始,比较当前节点的值与要查找的值。
如果它们相等,则查找成功,返回当前节点的位置。
(2)如果当前节点的值大于要查找的值,则进入当前节点的左子树中进行查找;否则进入当前节点的右子树中进行查找。
(3)重复步骤2,直到找到要查找的值或者搜索路径上的所有节点都已访问过。
如果最终没有找到要查找的值,则返回空指针。
实验三二叉排序树的建立和查找一、实验目的1.掌握二叉排序树的建立算法2.掌握二叉排序树查找算法。
二、实验环境操作系统和C语言系统三、预习要求复习二叉排序树的生成及查找算法,编写完整的程序。
四、实验内容实现二叉排序树上的查找算法。
具体实现要求:用二叉链表做存储结构,输入键值序列,建立一棵二叉排序树并在二叉排序树上实现查找算法。
五、参考算法#include <stdio.h>#include <stdlib.h>typedef int InfoType;typedef int KeyType; /*假定关键字类型为整数*/typedef struct node /*结点类型*/{KeyType key; /*关键字项*/InfoType otherinfo; /*其它数据域,InfoType视应用情况而定,下面不处理它*/struct node *lchild,*rchild; /*左右孩子指针*/}BSTNode;typedef BSTNode *BSTree; /*BSTree是二叉排序树的类型*/BSTNode *SearchBST(BSTree T,KeyType key){ /*在二叉排序树T上查找关键字为key的结点,成功时返回该结点位置,否则返回NULL*/if(T==NULL||key==T->key) /*递归的终结条件*/return T; /*若T为空,查找失败;否则成功,返回找到的结点位置*/if(key<T->key)return SearchBST(T->lchild,key);elsereturn SearchBST(T->rchild,key); /*继续在右子树中查找*/}void InsertBST(BSTree *T,int key){ /*插入一个值为key的节点到二叉排序树中*/BSTNode *p,*q;if((*T)==NULL){ /*树为空树*/(*T)=(BSTree)malloc(sizeof(BSTNode));(*T)->key=key;(*T)->lchild=(*T)->rchild=NULL;}else{p=(*T);while(p){q=p;if(p->key>key)p=q->lchild;else if(p->key<key)p=q->rchild;else{printf("\n 该二叉排序树中含有关键字为%d的节点!\n",key);return;}}p=(BSTree)malloc(sizeof(BSTNode));p->key=key;p->lchild=p->rchild=NULL;if(q->key>key)q->lchild=p;elseq->rchild=p;}}BSTree CreateBST(void){ /*输入一个结点序列,建立一棵二叉排序树,将根结点指针返回*/BSTree T=NULL; /*初始时T为空树*/KeyType key;scanf("%d",&key); /*读入一个关键字*/while(key){ /*假设key=0是输入结束标志*/ InsertBST(&T,key); /*将key插入二叉排序树T*/scanf("%d",&key); /*读入下一关键字*/}return T; /*返回建立的二叉排序树的根指针*/ }void ListBinTree(BSTree T) /*用广义表示二叉树*/{if(T!=NULL){printf("%d",T->key);if(T->lchild!=NULL||T->rchild!=NULL){printf("(");ListBinTree(T->lchild);if(T->rchild!=NULL)printf(",");ListBinTree(T->rchild);printf(")");}}}void main(){BSTNode *SearchBST(BSTree T,KeyType key);void InsertBST(BSTree *Tptr,KeyType key);BSTree CreateBST();void ListBinTree(BSTree T);BSTree T;BSTNode *p;int key;printf("请输入关键字(输入0为结束标志):\n");T=CreateBST();ListBinTree(T);printf("\n");printf("请输入欲查找关键字:");scanf("%d",&key);p=SearchBST(T,key);if(p==NULL)printf("没有找到%d!\n",key);elseprintf("找到%d!\n",key);ListBinTree(p);printf("\n");}实验中出现的问题及对问题的解决方案输入数据时,总是不能得到结果,原因是在建立二叉树函数定义中,是对指针的值进行了修改。
2020年计算机408数据结构算法题一、引言数据结构与算法是计算机科学和计算机工程领域中的核心内容,也是计算机科班学生必修的一门重要课程。
每年的计算机408考试中,数据结构与算法题型都是考生们备考的重点和难点之一。
了解并掌握2020年计算机408数据结构算法题的内容和出题特点,对于考生们备考复习具有重要的指导意义。
二、2020年计算机408数据结构算法题概述2020年计算机408数据结构算法题涵盖了以下主要内容:1. 线性表2. 树和二叉树3. 图4. 排序算法5. 查找算法接下来将分别对以上内容进行详细介绍和分析,并针对每个部分的题型特点进行总结和归纳。
三、线性表线性表是数据结构中最基本的一种结构,包括顺序表和链表两种类型。
在2020年计算机408数据结构算法题中,与线性表相关的题型主要包括如下内容:1. 顺序表的基本操作2. 链表的插入和删除3. 线性表的应用实例以上内容中,顺序表的基本操作涉及数组的使用和基本的插入、删除等操作,而链表的插入和删除则需要考生掌握指针的运用和链表结构的特点。
在解答线性表的应用实例时,考生需要具备一定的抽象思维能力,能够将具体问题抽象为线性表的操作流程,并给出相应的算法实现。
四、树和二叉树树和二叉树是数据结构中的重要内容,在2020年计算机408数据结构算法题中所涉及的内容主要包括:1. 二叉树的遍历2. 二叉树的建立和操作3. 树的遍历和操作4. 树和二叉树的应用实例在解答二叉树的遍历题目时,考生需要熟练掌握前序、中序和后序三种遍历方式的递归和非递归实现方法,并能够灵活应用。
对于二叉树的建立和操作题目,需要考生具备一定的递归思维能力和对指针操作的熟练运用。
树和二叉树的应用实例则需要考生在理解问题的基础上,通过树和二叉树的操作来解决具体问题,涉及到对树结构的应用和实际意义的理解。
五、图图是数据结构中的另外一种重要结构,而在2020年计算机408数据结构算法题中涵盖的图的内容主要包括:1. 图的存储结构2. 图的遍历和搜索算法3. 最短路径算法4. 拓扑排序和关键路径算法5. 最小生成树算法在解答图的存储结构题目时,考生需要了解邻接矩阵和邻接表两种存储结构的特点和区别,并能够根据具体问题选择合适的存储结构。