基于DSP的磁流变减振悬架系统电流控制的研究
- 格式:doc
- 大小:995.00 KB
- 文档页数:44

基于DSP的磁悬浮球控制系统研究的开题报告一、选题背景与意义:近年来,随着计算机技术、机械工程技术和电子技术的不断进步和发展,磁悬浮技术得到了广泛的应用和推广,其中磁悬浮球具有良好的控制性能和高精度的运动能力,逐渐成为磁悬浮技术当中的重要组成部分。
本课题将研究基于DSP技术的磁悬浮球控制系统,通过对磁悬浮球的控制算法、硬件系统和软件系统进行优化,提高其控制精度和运动性能,为相关领域的研究和应用提供基础支撑和技术支持。
二、研究内容和目标:本课题将主要研究基于DSP的磁悬浮球控制系统的关键技术和优化方法,具体内容包括:1.磁悬浮球的物理原理和工作机理研究,探讨其运动规律和控制要素。
2.磁悬浮球控制系统的硬件设计与电路原理设计,包括磁浮控制芯片选型、系统电路设计和控制器设计等。
3.磁悬浮球控制算法的设计与优化,包括PID控制算法、模糊控制算法和神经网络控制算法等。
4.基于DSP的磁悬浮球控制系统软件设计,包括系统参数配置、数据采集和实时控制等。
本课题的目标是,设计出一套成熟稳定的基于DSP的磁悬浮球控制系统,满足精度高、可靠性好、动态性能好等要求,为实际应用场景提供技术支持和解决方案。
三、研究方法和技术路线:本课题将采用实验研究和仿真模拟相结合的方法,具体技术路线如下:1.磁悬浮球的物理原理和工作机理研究:通过文献查找、实验观察和现场调研等方法,研究磁悬浮球的运动规律和控制要素。
2.磁悬浮球控制系统的硬件设计与电路原理设计:根据研究结果设计磁悬浮控制系统的硬件设备和电子电路,确保系统稳定可靠和精度高。
3.磁悬浮球控制算法的设计与优化:在磁悬浮球控制系统硬件基础上,设计出合适的控制算法,通过仿真模拟和优化测试,提高系统的控制精度、运动性能和稳定性。
4.基于DSP的磁悬浮球控制系统软件设计:在控制系统硬件和控制算法的基础上,设计实时控制软件和参数配置软件,实现系统的高效运行和参数调整。
四、研究进度安排:第一年:1.文献调研、磁悬浮球控制系统硬件设计和电路原理设计。

卡车悬架系统优化引言卡车悬挂系统的改进,分析调查,以提高设计,测试技术和计算机模拟预测性能的硬件创新,已在许多以前的技术文件。
其中许多研究者一直在寻找,在某种意义上,可能被称为一个最佳的悬挂系统,难以捉摸的设计。
获得最佳设计相关的困难,主要是由于难以确定的经营环境(输入)和优化(输出)的现实人物的优点或准则。
车辆悬架系统的根本目的是充当车架,底盘,乘客和货物,道路或地形不规则引起的振动输入之间的隔振系统。
缺乏一个公司确定性的定义,一辆汽车在其整个一生中遭受的个人资料,需要的统计方法,随机振动。
笔者和其他人,例如,曾在输入的统计定义,提出了一些进展。
这似乎可以假设一个白色(所有频率的概率相等)高斯分布的斜率(或第一个特殊的衍生),道路或越野地形相当现实的近似。
这可以被转换为汽车振动研究的时间投入占车辆的速度和行车轮的相互关系。
振动响应或通常与随机振动相关的输出措施均方根加速。
研究表明,适当的频率域加权均方根加速度为人力共振可以产生与人体舒适度的主观感觉相关的标准。
正弦和随机测试部件和货物规格,例如,通常与加速度水平。
从组件疲劳失效的角度来看,有迹象表明,地应力测量的武器将产生一个随机环境中的现实标准。
因此,正确识别随机选择合适的均方根输出输入可能被用于卡车悬架系统的优化技术。
笔者近日完成的一项研究,开发优化隔振系统受到随机的投入和实际的数值技术要求所必需的一些基本关系。
本文提出了一些适用于一个特定的卡车悬挂系统进行重新设计,研究的结果。
优化探索实现一个特定的车辆悬架系统的改进设计的程序之前,它是简要地探索优化和分析系统的现代概念的兴趣。
从工程的角度来看,在系统设计中采用的技术可分为两个类别:合成和分析。
合成系统,意味着只有最低金额和有关系统的信息是正常的定义,输入和功能的要求,或优化标准。
根据这些信息最好的系统合成,以满足优化目标。
从随机输入系统的角度来看,合成技术的雏形最早由维纳介绍和牛顿,古尔德和Kaiser 进一步发展。

基于 DSP 的磁悬浮列车控制系统设计磁悬浮列车是当今世界上最先进的高速铁路交通工具之一。
它基于磁悬浮原理,具有高速、平稳、能耗低等优点,被广泛应用于国内外的高速铁路建设中。
其中,磁悬浮列车控制系统是保证磁悬浮列车运行安全、可靠、高效的关键技术之一。
磁悬浮列车控制系统主要包括车辆控制系统和供电系统两部分。
其中,车辆控制系统是实现列车自主控制、运行、安全保障等的核心部分。
目前,在车辆控制系统中,数字信号处理器(DSP)的运用已成为当今国际上磁悬浮列车控制系统的主流技术之一。
磁悬浮列车控制系统的设计需要对列车的运动参数进行准确的计算和控制。
其中,列车的运动状态包括速度、加速度、位置等多个参数。
通过对这些参数的测量和控制,可以对磁悬浮列车进行准确的控制和驾驶,保证其安全、平稳、高效地运行。
DSP的优点是精确、实时、高速地处理信号数据。
它不仅可以实现数据采集、滤波、放大、变换等基本处理功能,还能够支持复杂的算法实现、数据分析及诊断等高级数据处理技术,实现对列车运动状态的实时监测和控制。
在磁悬浮列车控制系统中,DSP技术的运用可以实现列车的自动驾驶、速度控制、制动监测、列车调度等多个功能。
为了更好地应用DSP技术,磁悬浮列车控制系统需要精确的运动控制算法和控制模型。
这些算法和模型可以不断地优化和改进,以更好地满足列车运营的各种复杂场景。
例如,在列车进入弯道、通过衡器、刹车等特殊场景时,需要优化和改进磁悬浮列车控制系统,提高其适应性和灵活性。
此外,在磁悬浮列车控制系统的设计中,还需考虑其他多个方面的要素。
例如,列车的车体设计、供电系统、应急安全系统等都会对控制系统的设计产生一定的影响。
因此,在进行磁悬浮列车控制系统设计时,需要全面系统地考虑各个方面的要素,避免出现失误或者不安全的情况。
综上所述,基于DSP技术的磁悬浮列车控制系统设计具有很大的潜力和远景。
它可以实现列车的自动驾驶、高速运行、平稳安全、高效节能等多个功能,大大提升列车的运营效率和质量。
RUCK SUSPENSION SYSTEM OPTIMIZATIONINTRODUCTIONTruck suspension systems,hardware innovations for improvements,analytical investigations to improve design, techniques for testing,and computer simulation to predict performance have been described in numerous previous technical papers。
Many of these investigators have been seeking, in some sense, that elusive design which might be termed an optimum suspension system. The difficulty associated with obtaining an optimal design is primarily due to the difficulty of determining the operating environment (input) and a realistic figure of merit or criterion for optimization (output)。
The fundamental purpose of a vehicle suspension system is to act as a vibration isolation system between the frame, chassis,passengers, and cargo,and the vibratory input caused by road or terrain irregularities. The lack of a firm deterministic definition of the profile to which a vehicle is subjected throughout its lifetime requires a statistical approach,that of random vibration。

《基于磁流变阻尼器的半主动座椅悬架减振策略研究》一、引言随着现代工业技术的飞速发展,人们对乘坐舒适度的要求越来越高。
座椅悬架系统作为影响乘坐舒适度的重要因素,其减振性能的优化显得尤为重要。
近年来,磁流变阻尼器因其独特的非线性阻尼特性,在半主动座椅悬架系统中得到了广泛的应用。
本文将重点研究基于磁流变阻尼器的半主动座椅悬架的减振策略,以实现更好的乘坐舒适度。
二、磁流变阻尼器原理及特性磁流变阻尼器是一种智能阻尼装置,其工作原理是利用磁场改变磁流变材料的流变特性,从而实现阻尼力的连续可调。
磁流变阻尼器具有非线性、可调性等优点,为半主动座椅悬架系统的减振策略提供了可能性。
三、半主动座椅悬架系统结构与工作原理半主动座椅悬架系统主要由座椅、弹簧、阻尼器等部分组成。
其中,磁流变阻尼器作为关键部件,通过调节阻尼力来实现对座椅振动的控制。
系统的工作原理是在振动过程中,根据实时检测到的振动信息,通过控制算法调整磁流变阻尼器的阻尼力,从而达到减振的目的。
四、减振策略研究4.1 减振策略的制定为了实现半主动座椅悬架系统的最优减振效果,需要制定合理的减振策略。
本文提出了一种基于天棚阻尼的磁流变阻尼器控制策略。
该策略通过实时检测座椅的振动信息,利用天棚阻尼算法计算出期望的阻尼力,然后通过控制系统调整磁流变阻尼器的阻尼力,以达到减小振动的效果。
4.2 仿真分析为了验证减振策略的有效性,本文进行了仿真分析。
通过建立半主动座椅悬架系统的仿真模型,模拟不同工况下的振动情况,对比分析采用不同减振策略时的减振效果。
仿真结果表明,基于天棚阻尼的磁流变阻尼器控制策略能够显著提高座椅的乘坐舒适度。
五、实验验证为了进一步验证减振策略的实际效果,本文进行了实验验证。
通过在实际的半主动座椅悬架系统中应用减振策略,观察并记录在不同工况下的振动情况及乘坐舒适度评价。
实验结果表明,采用基于天棚阻尼的磁流变阻尼器控制策略的半主动座椅悬架系统,能够有效减小振动,提高乘坐舒适度。
《磁流变半主动悬架控制策略研究》一、引言随着汽车工业的快速发展,人们对汽车乘坐舒适性和行驶稳定性的要求越来越高。
悬架系统作为汽车的重要组成部分,其性能直接影响到整车的驾驶体验。
磁流变半主动悬架作为一种新型的悬架技术,具有优良的减振性能和适应性,成为了当前研究的热点。
本文旨在研究磁流变半主动悬架的控制策略,以提高汽车的行驶性能和乘坐舒适性。
二、磁流变半主动悬架技术概述磁流变半主动悬架是一种利用磁流变液体的可调阻尼特性来实现悬架阻尼可调的悬架系统。
它通过改变磁流变液的阻尼系数,实现对悬架阻尼的实时调整,从而提高车辆的行驶性能和乘坐舒适性。
磁流变半主动悬架具有结构简单、阻尼可调、响应速度快等优点,成为了现代汽车悬架技术的研究热点。
三、磁流变半主动悬架控制策略研究3.1 控制策略概述磁流变半主动悬架的控制策略是决定其性能的关键因素。
目前,常见的控制策略包括天棚阻尼控制策略、预瞄天棚阻尼控制策略、模糊控制策略等。
这些控制策略各有优缺点,需要根据不同的应用场景和需求进行选择和优化。
3.2 天棚阻尼控制策略天棚阻尼控制策略是一种基于速度反馈的控制策略,其基本思想是模拟天棚阻尼的效果,通过速度传感器实时检测车身的速度,并根据设定的阻尼系数计算出所需的阻尼力。
该策略具有结构简单、响应速度快等优点,但对于复杂路况和多种工况的适应性有待提高。
3.3 预瞄天棚阻尼控制策略预瞄天棚阻尼控制策略是在天棚阻尼控制策略的基础上,引入了预瞄功能。
通过预知未来路况信息,提前调整悬架的阻尼力,从而提高车辆的行驶稳定性和乘坐舒适性。
该策略具有较好的适应性和鲁棒性,但需要高精度的预瞄算法和传感器支持。
3.4 模糊控制策略模糊控制策略是一种基于模糊逻辑的控制策略,其基本思想是通过建立模糊规则库和模糊推理机制,实现对复杂系统的高效控制。
在磁流变半主动悬架控制中,模糊控制策略可以根据实时路况和车辆状态信息,自动调整阻尼系数和悬架刚度,实现最优的减振效果。
基于磁流变减震器的车辆悬架系统分析与优化近年来,随着技术的不断发展和进步,汽车工业也在不断涌现出新的技术和产品。
作为汽车悬架系统的关键部件之一,磁流变减震器逐渐成为汽车悬架技术领域的一个热门话题。
本文将从磁流变减震器与车辆悬架系统的基本原理入手,论述基于磁流变减震器的车辆悬架系统的分析与优化。
一、磁流变减震器的基本原理磁流变减震器是一种利用磁流变效应来实现减震功能的装置。
它利用磁性流体在磁场作用下可改变黏度的特性,通过控制磁流变减震器内的磁场强度,来控制磁流体的黏度,从而调节减震器的阻尼特性。
具体来说,磁流变减震器内部由磁流体和控制装置组成。
当磁流体受到磁场作用时,其分子间的相互作用力发生改变,从而使其黏度发生变化。
磁流变减震器的控制装置可以通过控制磁场强度来控制磁流变减震器内磁流体的黏度,从而达到调节减震器阻尼的目的。
二、基于磁流变减震器的车辆悬架系统基于磁流变减震器的车辆悬架系统是一种利用磁流变减震器来调节汽车悬架系统阻尼特性的系统。
其主要由磁流变减震器、传感器、控制器等组成。
在这种悬架系统中,传感器可以实时检测车辆在行驶中受到的各种外界因素的影响,如颠簸、起伏、路面不平等等。
控制器接收传感器传输的信息,进行处理后,通过控制磁流变减震器内的磁场强度来调节减震器的阻尼特性,以此来实现车辆行驶中的稳定性、舒适性、安全性等的提升。
三、分析与优化基于磁流变减震器的车辆悬架系统的分析与优化主要包括以下几个方面:1. 磁流变减震器的选择:不同的磁流变减震器具有不同的性能特点和适用范围,选择适合车型和行驶路况的磁流变减震器至关重要。
2. 控制算法的设计:通过优化控制算法,可实现更加精准的控制和更加优化的行驶性能。
3. 系统参数的优化:包括磁场强度、磁极间距等参数的优化,可进一步提升系统控制性能和行驶性能。
4. 悬架系统设计的优化:通过对悬架系统设计的优化,如改变减震器安装位置、调整弹簧刚度等,可为基于磁流变减震器的车辆悬架系统的优化提供更好的基础。
基于DSP的磁悬浮盘片控制系统的设计与研究的开题报告一、选题背景分析随着计算机技术的不断发展,磁盘的存储容量越来越大、传输速度也越来越快。
磁悬浮盘片技术是一种新型的存储技术,它采用磁悬浮技术,通过电磁控制来悬浮旋转磁盘,从而达到高速高容量存储的目的。
将其应用于计算机系统中,可以极大地提升计算机的性能和稳定性。
磁悬浮盘片控制系统是实现磁悬浮盘片技术的关键。
传统的磁盘控制系统主要采用PID控制算法实现,但该算法需要人工调整系数,且不易满足快速响应和精准控制的要求。
基于DSP的磁悬浮盘片控制系统能够采用更加先进的控制方法和优化算法,实现更高效的控制。
二、研究目标及意义本研究旨在设计并实现一种基于DSP的磁悬浮盘片控制系统。
通过对比传统PID算法与先进控制算法,研究最佳的控制策略,实现更精准、更快速的控制实现。
该研究具有重要的理论和应用价值。
一方面,研究过程中的优化算法和控制方法同样适用于其他类型的电机驱动控制系统,并具有良好的控制效果;另一方面,实现基于DSP的磁悬浮盘片控制系统,也能够极大地提升磁悬浮盘片技术的应用范围,推动计算机存储技术的发展。
三、研究内容及工作计划1.系统框架设计:根据磁悬浮盘片的特点,设计基于DSP的磁悬浮盘片控制系统,确定系统模型并实现模型建模。
2.控制算法设计:对传统PID算法进行分析,研究先进控制算法的优缺点,并结合磁悬浮盘片的实际情况,设计最佳的控制算法。
3.算法实现与控制效果分析:在实验室中搭建系统实验平台,编写控制算法的代码,并进行实验测试。
通过分析数据来分析算法的性能表现。
4.结果分析与总结:总结实验数据,对研究结果进行分析总结,提出下一步的研究方向和改进措施。
时间计划:第一年:梳理研究领域的前沿技术和相关的理论知识,完成系统框架设计和控制算法的初步研究。
第二年:实验室中搭建系统实验平台,完成算法的编码和实验测试,初步分析数据,并确认最佳控制策略。
第三年:进一步深入研究最佳控制策略,优化控制算法并进行实验测试,分析数据并总结研究成果。
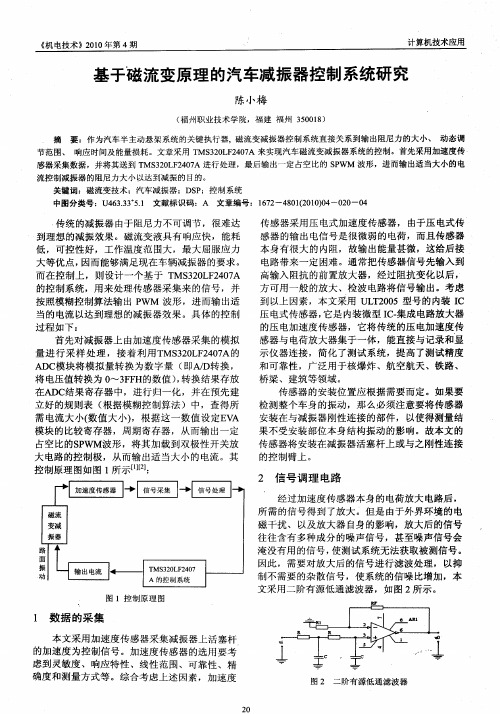
1 引言1.1本课题研究背景随着经济社会的发展,汽车已逐步走入普通家庭,成为人们生活和出行必不可少的工具,人们对汽车的安全舒适性能也提出了更高的要求。
汽车行驶时,由于路面不平及发动机、传动系、车轮等旋转部件激发汽车的振动,这些振动直接影响到汽车的乘坐舒适性、操纵稳定性和可靠性。
而传统的被动悬架所采用的减振器由于其自身的局限性无法满足上述要求。
磁流变阻尼器是一种在磁场作用下阻尼可控的器件,与传统汽车悬架系统相比,装有磁流变阻尼器的半主动悬架系统可以根据路面状况和车辆运行状态,在计算机的控制下自动调节阻尼力的阻尼器,大大提高汽车的舒适性和行车安全性。
磁流变阻尼器的工作原理是改变励磁线圈中的电流从而获得不同强度的磁场,使工作腔中的磁流变液的流动特性发生变化,从而改变阻尼力的大小。
因此,控制器只要能实时精确调节磁流变阻尼器的驱动电流,就能达到控制磁流变阻尼器的目的[1]。
随着汽车结构和功能的不断改进和完善,研究汽车振动,设计新型电控系统从而将汽车振动控制到最低水平已经成为提高现代汽车品质的重要措施。
研究性能可靠,调节方便的可调阻尼减振器将是半主动悬架走向大众的必经之路。
1.2汽车悬架系统简介悬架是连接车身和车轮之间全部零部件的总称,是减少动载荷引起的零部件损坏、提高车辆平顺性(乘座舒适性)和安全性(操纵稳定性)的关键(平顺性和操纵稳定性是汽车的最重要的性能指标之一)。
悬架系统主要由弹性元件(如钢板弹簧、螺旋弹簧、扭杆等)、减振器和导向机构组成。
悬架系统中减振器的主要作用是提供阻尼力,加速车架与车身振动的衰减,从而改善车辆行驶平顺性。
按照系统组成有无控制环节,车辆悬架系统可粗略分为被动悬架系统和智能悬架系统,智能悬架根据作用原理又可以粗分为主动悬架和半主动悬架两类。
目前汽车上普遍采用的被动悬架其参数足以对车辆乘座舒适性和操纵稳定性要求的折衷设计,采用保守弹性元件(弹簧)和耗能元件(减振器),弹簧刚度和减振器阻尼系数等参数同定,减振器的阻尼力不可调,其弹簧的弹性特性和减振器的阻尼特性不能随着车辆运行工况的变化而进行调节,优点是结构简单,成本低;缺点是缺乏灵活性,一旦设计定型,悬架参数就无法调解了,所以采用被动悬架的车辆的减振效果只能是在特定路况和车况下才能达到最优,难以满足要求越来越高的平顺行和操纵稳定性的要求[2]。
一旦路况或车况参数发生变化,就会引起车辆平顺性(或)操纵稳定性不同程度的降低。
1.2.1汽车悬架系统的分类在由悬架系统的工作原理不同,目前汽车悬架可分为被动悬架(Passive Suspension)、半主动悬架(Semi-Active Suspension)及主动悬架(Active Suspension)等三种[3]。
(1)被动悬架被动悬架无外部能量输入,弹簧刚度和减振器阻尼系数均不可调。
只能在特定工况下达到最优,缺少对变载荷、变车速、不可预测路况的适应性,限制了被动悬架系统性能的进一步提高。
硬阻尼的悬架能保证良好的操纵稳定性,但将更多的路面输入传递给车身。
当汽车低速行驶在凸凹路面或高速直线行驶时,悬架很硬,驾驶员会对这种不舒服生厌或者造成货物损坏。
软阻尼的悬架使乘座舒适,但它却降低了转弯稳定性、机动性或斜坡倒车的稳定性。
因此设计一个好的被动悬架在某种程度上优化了乘座舒适性和操纵稳定性,但这种折衷不能消除。
被动悬架主要有纵臂式、横臂式和车轮沿主销移动式独立悬架等。
由于参数不能任意选择和调节,限制了被动悬架系统性能的进一步提高。
(2)半主动悬架主要采用调节减振器的阻尼系数法。
半主动悬架根据汽车行驶状态的动力学要求,通过改变减振器的节流口面积或调节节流阀开度来调节液力减振器的阻尼,以改善悬架的振动特性。
半主动悬架中没有主动力作动器,但可通过测取车辆运动信号,经控制器发出控制信号改变悬架的刚度或阻尼。
在半主动悬架系统中,支承车体的重量主要依靠弹性元件。
常用的弹性元件有螺旋弹簧,扭杆弹簧,钢板弹簧,橡胶弹簧和空气弹簧等。
螺旋弹簧和扭杆弹簧可近似认为是线性弹簧,弹簧刚度是常数。
钢板弹簧,橡胶弹簧和空气弹簧是非线性弹簧,其切向刚度随外载荷变化。
半主动悬架系统最常用的方法是改变阻尼力的大小。
这方面己有大量的专利和试验模型。
阻尼种类繁多,机理复杂,常用的是物体在粘性流体中运动产生的粘性阻尼,干摩擦阻尼以及材料内部内摩擦而产生的阻尼等。
以上三种阻尼在车辆半主动悬架系统中都有应用。
但对于可调节阻尼的半主动悬架最常用的是粘性阻尼。
改变粘性阻尼力大小的方法有两种途径。
一种是调节节流口的开度大小。
另一种是应用功能材料改变流体的粘性系数。
例如电流变材料和磁流变材料。
通常,悬架减振器由带有活塞的活塞杆和油缸组成,活塞上有节流孔。
减振器做伸缩运动,具有粘性的油通过节流孔产生阻力。
当减振器缓慢动作,阻尼力小,若快速动作就会发生很大的阻尼力。
节流孔越大,阻尼越小;油粘度越大,阻尼力越大。
根据阻尼系数是连续可调还是离散可调,半主动悬架可以分为连续可调式,无级可调式两种。
它们的区别在于:连续可调式半主动悬架中的减振器阻尼系数在一定的变化范围内可以连续地变化,而可切换阻尼式半主动悬架中的减振器阻尼系数只能在几个离散的阻尼值之间进行切换,无级可调式半主动悬架中的减振器阻尼系数可在最小值到最大值之间进行无级可调。
半主动悬架没有专门产生控制力的元件,它是按照传感器传递的数据由控制器算出所需的控制力,然后通过调节减振器的阻尼模拟控制力,以衰减车身的振动。
实施半主动控制的减振器主要有液力减振器、电流变液减振器和磁流变液减振器,其特征是联结一个带有阻尼阀的小型蓄能器,再加一套液力控制装置,使液力减振器产生的阻尼力正比于车身的绝对速度。
其中磁流变减振器可广泛应用于各种振动系统,具有阻尼大、功率消耗低等特点。
在国外已将磁流变减振器应用于汽车悬架的控制系统中。
悬架系统理想的阻力特性应该是随着道路条件或运行状态的变化而改变,减振器的阻力应和悬架系统的参数有恰当匹配关系。
当悬架系统的某一参数发生变化时,减振器的阻力也应随之变化,从而可保证悬架系统有良好的振动特性。
随着新型智能材料的应用,半主动悬挂越来越受人们的重视,应用也越多。
目前,全球著名汽车公司竞相研究和开发半主动悬架系统,如德尔福、丰田的电子控制悬架系统。
由于半主动悬架仅需要消耗能量达到调节刚度和阻尼的目的,制造成本低。
因此,现代汽车越来越多的采用半主动悬架,也使之成为目前汽车新技术研究的热点[4]。
(3)主动悬架主动悬架由隔振弹簧、控制器和作动器组成,它由外部提供能量使作动器工作,从而使汽车在各种行驶条件下的乘坐舒适性和行驶安全性同时得到改善。
目前,大多数主动悬架采用液压控制的作动器。
主动悬架不仅能在启动、加减速和制动、转向侧倾等行驶工况实时地调节车身运动;在高速公路、坏路面行驶或车辆载荷变化时还能相应调节车身高度以提高行驶平顺性。
20世纪70年代,丰田、沃尔沃等汽车公司就在汽车上作了成功试验,使主动悬架控制系统以优越的减振性能满足了多种车辆的性能要求。
近年来,日产和丰田公司在轿车上成功地应用了液力主动悬架控制系统。
在丰田、沃尔沃、奔驰等一些高级轿车上,悬架系统的传感器将车速、位移和加速度等信号,经过输入电路进行转换后,以数字形式送入系统的微处理器,微处理器经过计算处理后,按照设定的控制规律向执行机构(空气弹簧、油气弹簧及动力源等)适时地发出控制信号,从而调节悬架的刚度和阻尼系数,达到控制车身振动和车身高度的目的,使轿车适应各种复杂的行驶工况对悬架的不同要求,从而使车辆的行驶平顺性和驾驶性能得到了较大的提高,即使在不良路面高速行驶时,车身也非常平稳,轮胎的噪音小,转向和制动时车身保持水平,乘坐非常舒服。
主动悬挂是可以自行产生作用力的悬挂。
它需要消耗大量能量。
主动悬挂通常主要包括以下几部分:各种传感器和控制单元ECU,动力源(液压泵,空气压缩机等),产生力及力矩的作动器( 油缸,步进电机,电磁铁等),有时候也包括普通弹簧和被动阻尼器。
它是最高级别悬挂形式,通用公司在1954年就提出了主动悬架控制系统的概念,它针对实际工况和用户设定,主要是根据检测到的环境与车体状况,通过各种反馈信息来实现悬架系统的弹簧刚度和减振器阻尼值的可调,传感器将采集到的反映悬架振动的信号传给控制器,控制器控制主动悬架的力发生器,产生控制力控制车身的振动。
是有源主动悬架。
主动悬架系统可以使汽车操作稳定性、乘坐舒适性等性能达到最佳组合但是由于其系统结构复杂、能耗大、成本高、且响应速度受到一定限制,需要额外的控制功率等原因,目前仍停留在试验阶段,主要应用在赛车和中高级轿车上。
1.2.2 车用可调阻尼减振器技术的现状汽车减振器是利用小孔节流的流体阻尼技术来实现悬架系统的减振特性,称为液力减振。
从阻尼物理现象上区分,阻尼产生的机理有5类,即:工程材料的材料阻尼、流体的粘滞阻尼、结合面阻尼与库仑摩擦阻尼、冲击阻尼和磁电效应产生的阻尼。
悬架中的阻尼主要有摩擦阻尼和粘滞阻尼两大类,钢板弹簧叶片之间的相对运动产生摩擦阻尼,这种阻尼不稳定,阻力的大小不便于控制,尤其在好路上行驶,路面不平产生的动载很小,不足以克服叶片之间的摩擦时,会产生“锁止”现象,此时平顺性变差,因此近年来悬架设计中都力求减少钢板弹簧叶片间的摩擦,尽量采用液力减振器的粘滞阻尼,特别是轿车悬架基本全部采用此类减振器。
到目前为止,可调阻尼减振器形式有很多种。
如涡流式减振器、应变感应式减振器、频率感应式减振器、压电阻TEMS式减振器、磁流变体可调阻尼减振器、电流变体可调阻尼减振器、节流口可调阻尼减振器等。
我国学者主要致力于后三种阻尼可调减振器的研究,特别聚焦在减振液粘度的可调性方面。
跟据日本Bridgistone公司的研究材料介绍,电流变液体的粘度在几毫秒内即可随高磁场电压变化即迅速改变或恢复。
正是电流变流体这样一种在电解液(如硅酮)中高极化微质点的悬浮体,使得可调减振器阻尼特性随工况智能变化成为一种可能。
德国巴依尔公司在1995年对采用能改变减振度的电流变流体减振器进行了首次试验,由于采用了相应的传感器,便能直接分析路基情况,并在随后的0.0015s内调节减振器的特性,以满足路况要求。
近年来我国学者曾利用磁流体作为减振液通过控制磁场强度也达到调整减振器特性的要求,研究表明,以磁流体为减振液的阻尼调节性能较电流变流体的调节性能为好[5]。
1.3磁流变液的研究现状与发展趋势1.3.1 汽车磁流变液磁流变液是一种阻尼可控的智能材料,它由微米级的磁性颗粒与绝缘载液、稳定剂混合而成。
在无磁场作用下其流变特性为牛顿流动,而在外加磁场的作用下, 磁流变液在毫秒级的时间内可以实现从液态到固态的可逆转换。
其响应时间仅为几毫秒,易于控制并且连续可控。