位置控制和自动往返控制电路
- 格式:ppt
- 大小:5.69 MB
- 文档页数:18
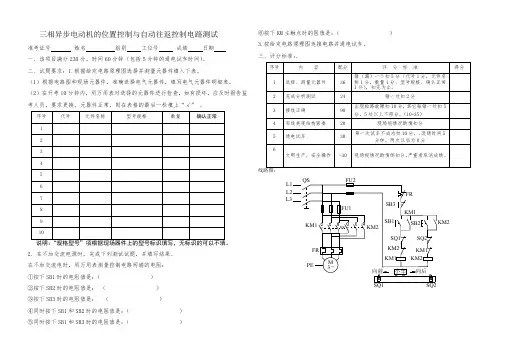
三相异步电动机的位置控制与自动往返控制电路测试准考证号姓名组别工位号成绩日期一、该项目满分230分,时间60分钟(包括5分钟的通电试车时间)。
二、试题要求:1.根据给定电路原理图选择并测量元器件填入下表。
(1)根据电路图和现场元器件,准确选择电气元器件,填写电气元器件明细表。
(2)在开考10分钟内,用万用表对选择的元器件进行检查,如有损坏,应及时报告监考人员,要求更换。
元器件正常,则在表格的最后一栏填上“√”。
序号代号元件名称型号规格数量确认正常12345678910说明:“规格型号”项根据现场器件上的型号标识填写,无标识的可以不填。
2、在不加交流电源时,完成下列测试试题,并填写结果。
在不加交流电时,用万用表测量控制电路两端的电阻:①按下SB1时的电阻值是:()②按下SB2时的电阻值是:()③按下SB3时的电阻值是:()④同时按下SB1和SB2时的电阻值是:()⑤同时按下SB1和SB3时的电阻值是:()⑥按下KM主触点时的阻值是:()3.按给定电路原理图连接电路并通电试车。
三、评分标准:.序号内容配分评分标准得分1 选择、测量元器件36错(漏)一个扣5分(代号1分,元件名称1分,数量1分、型号规格、确认正常1分),扣完为止。
2 完成分析测试24 错一处扣2分3 接线正确90出现短路故障扣10分,其它每错一处扣5分,5处以上不得分。
(10+35)4 布线美观结构紧凑20 现场视情况酌情扣分5 通电试车30第一次试车不成功扣10分,,改错时间5分钟。
两次以后为0分6文明生产,安全操作-30 现场视情况酌情倒扣分,严重者取消成绩。
线路图:L1L2L3QS FU2FU1KM1FRMSB3SB1KM13~SB2KM2KM2FRKM1KM2PESQ1SQ21MK2MKSQ1SQ2小车向前向后。
教案2015 ~2016学年度上学期课程名称:《电力拖动控制线路》授课教师:xxx课程所属系(部):机电工程系《位置控制与自动往返控制线路》课程教案如图1所示行车运行示意图,如何用电动机拖动行车向前和向后运行?利用接触器联锁正反转控制线路来拖动行车的向前和向后运动,电路图如下图2所示::提出问题:如果操作者失误,在行车运行到两端的极限位置时未能及时按下停止按钮,会出现什么结果?如何避免出现这一现象?【讲授新课】位置开关:定义:将机械信号转换为电气信号以控制运动部件位置或行程的控制电器。
位置控制就是利用生产机械运动部件上的挡铁与行程位置开关碰撞,使其触头动作来接通或断开电路,以实现对生产机械运动部件的位置或行程的一种方法称为位置控制,又称为行程控制或限位控制图位置开关在行车的两端终点处各安装一个行程开关SQ1和SQ2,行车前后各装有挡铁1和挡铁2指出利用行程开关,可以使行车在到达两端极限位置时自动停下来。
想一想:请同学们在接触器联锁正反转控制线路基础之上动手绘制可以对生产机械的运动部件实现位置控制的电路图。
提示:行程开关SQ1和SQ2的常闭触头应分别接入到接触器联锁正反转控制线路的哪部分?图位置控制线路线路的工作原理:先合上电源开关QS.1.行车向前运动:此时,如果按下SB1,由于SQ1常闭触头已分断,接触器KM1线圈也不会得电,保证了行车不会超过SQ1所在的位置。
2.行车向后运动:停车时只需按下SB3即可。
小组互评:让学生观看和点评他人作品。
教师点评:对存在的共性问题专门强调。
对各组任务的完成情况进行总体评价。
【导入新课】 提出问题:1、若想提高生产效率,实现对工件的连续加工,需要行车在一定行程内能自动往复运动,那么如何满足要求?2、当行车上的挡铁撞击行程开关使其停止向前运行后,这时再按下启动按钮SB1,行车会不会继续前行?为什么?))图自动往返行程控制线路线路的工作原理如下:先合上电源开关QS,停止时,按下SB3 整个控制电路失电 KM1(或KM2)枯藤老树昏鸦,小桥流水人家,古道西风瘦马。
位置控制与自动往返控制线路实训教案一、实训目的1. 理解位置控制和自动往返控制的工作原理。
2. 学会使用相关元器件进行位置控制与自动往返控制线路的搭建与调试。
3. 培养学生的动手能力、观察能力和问题解决能力。
二、实训原理1. 位置控制:通过位置传感器(如限位开关、编码器等)检测设备或物料的位置,根据预设的位置信号,控制执行元件(如电机、气缸等)的动作,以实现对位置的精确控制。
2. 自动往返控制:利用控制电路和定时器等元器件,实现执行元件在两个指定位置之间的自动往复运动。
三、实训内容1. 学习并理解位置控制与自动往返控制的基本原理。
2. 学习使用限位开关、编码器等位置传感器。
3. 学习使用电机、气缸等执行元件。
4. 学习使用定时器、控制电路等元器件进行自动往返控制。
5. 完成位置控制与自动往返控制线路的搭建与调试。
四、实训步骤1. 学习并理解实训原理,明确实训目标。
2. 学习并掌握相关元器件的功能和接线方法。
3. 根据实训要求,设计并搭建位置控制与自动往返控制线路。
4. 进行线路调试,观察并分析现象,调整参数,直至达到预期效果。
五、实训要求1. 了解并掌握位置控制与自动往返控制的基本原理。
2. 能够正确使用限位开关、编码器等位置传感器。
3. 能够正确使用电机、气缸等执行元件。
4. 能够正确使用定时器、控制电路等元器件进行自动往返控制。
5. 能够独立完成线路的搭建与调试,解决问题。
六、实训安全注意事项1. 确保实训环境安全,穿戴好个人防护装备。
2. 在操作电气设备时,确保断开电源,防止触电。
3. 使用工具时,要小心谨慎,防止受伤。
4. 实训过程中,不得擅自离开工作岗位,确保实训设备的安全运行。
5. 如遇到问题,及时报告教师,不得擅自解决。
七、实训评价1. 评价学生对位置控制与自动往返控制原理的理解程度。
2. 评价学生对相关元器件的功能和接线方法的掌握程度。
3. 评价学生对线路搭建与调试的能力。
4. 评价学生的安全意识和团队协作能力。

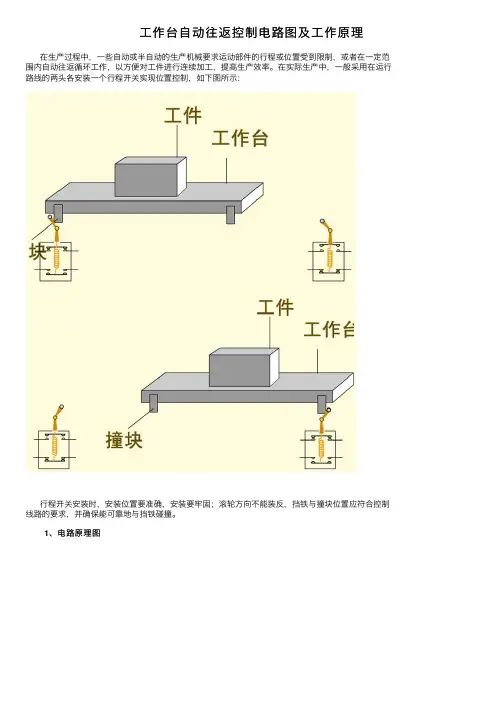
⼯作台⾃动往返控制电路图及⼯作原理在⽣产过程中,⼀些⾃动或半⾃动的⽣产机械要求运动部件的⾏程或位置受到限制,或者在⼀定范围内⾃动往返循环⼯作,以⽅便对⼯件进⾏连续加⼯,提⾼⽣产效率。
在实际⽣产中,⼀般采⽤在运⾏路线的两头各安装⼀个⾏程开关实现位置控制,如下图所⽰:⾏程开关安装时,安装位置要准确,安装要牢固;滚轮⽅向不能装反,挡铁与撞块位置应符合控制线路的要求,并确保能可靠地与挡铁碰撞。
1、电路原理图2、电路组成电路由断路器 QS;熔断器 FU1和 FU2;热继电器 FR;按钮 SB1、SB2、SB3;交流接触器 KM1 和 KM2;⾏程开关SQ1、SQ2;电动机 M 组成。
3、技术要求按下启动按钮 SB2,电机运转,带动⼯作台左移,当运动到设计位置压动 SQ1 限位开关时,电机反转,带动⼯作台右移,当运动到设计位置压动 SQ2 限位开关时电动机正转,… … 如此往复。
按下停⽌按钮 SB1,电动机⽆论正向、反向运⾏都能停车。
4、⼯作原理(1)合上电源开关 QS,电源引⼊。
(2)左移按下 SB2→KM1 线圈得电→→KM1 动断触点先断开→使 KM2 线圈断电→接触器互锁。
→KM1 主触头后闭合→电动机 M 启动连续正转→⼯作台左移。
→KM1 动合触点后闭合→实现⾃锁。
⾄限定位置,撞块碰限位开关 SQ2 挡铁→SQ2 动断触点先断开→使 KM1 线圈断电→KM1 主触头分断,电动机 M 断电停转,⼯作台停⽌左移;KM1 动合触头分断解除⾃锁;KM1 动断触点闭合解除互锁。
(3)右移SQ2 动合触点后闭合→使 KM2线圈得电→→KM2 动断触点断开→实现互锁。
→KM2 主触头后闭合→电动机 M 启动连续反转→⼯作台右移。
→KM2 ⾃锁触点闭合→实现⾃锁。
(4)停⽌时只需按下 SB3 即可。

位置控制与自动往返控制线路实训教案第一章:位置控制原理概述1.1 学习目标:了解位置控制的基本原理,掌握位置控制系统的组成及工作原理。
1.2 教学内容:1.2.1 位置控制的概念1.2.2 位置控制系统的组成1.2.3 位置控制系统的分类1.2.4 位置控制技术在工业中的应用1.3 实训项目:认识位置控制元件(如限位开关、编码器等)第二章:自动往返控制原理2.1 学习目标:了解自动往返控制的基本原理,掌握自动往返控制系统的组成及工作原理。
2.2 教学内容:2.2.1 自动往返控制的概念2.2.2 自动往返控制系统的组成2.2.3 自动往返控制系统的分类2.2.4 自动往返控制技术在工业中的应用2.3 实训项目:搭建一个简单的自动往返控制线路第三章:位置控制与自动往返控制线路的设计3.1 学习目标:掌握位置控制与自动往返控制线路的设计方法,能够独立设计并搭建相应的控制系统。
3.2 教学内容:3.2.1 位置控制与自动往返控制线路的设计原则3.2.2 位置控制与自动往返控制线路的设计步骤3.2.3 常见位置控制与自动往返控制线路的案例分析3.3 实训项目:设计并搭建一个具有位置控制和自动往返功能的控制线路第四章:位置控制与自动往返控制线路的调试与维护4.1 学习目标:掌握位置控制与自动往返控制线路的调试方法,了解其维护保养知识。
4.2 教学内容:4.2.1 位置控制与自动往返控制线路的调试方法4.2.2 位置控制与自动往返控制线路的维护保养知识4.3 实训项目:对设计搭建的控制线路进行调试,并对其进行维护保养第五章:位置控制与自动往返控制线路的应用案例分析5.1 学习目标:了解位置控制与自动往返控制线路在实际工程中的应用,掌握其设计要点。
5.2 教学内容:5.2.1 位置控制与自动往返控制线路在实际工程中的应用案例5.2.2 案例分析方法及技巧5.3 实训项目:第六章:传感器在位置控制与自动往返控制中的应用6.1 学习目标:理解传感器在位置控制与自动往返控制系统中的重要性,熟悉不同类型的传感器及其应用。
自动往返控制电路原理
一、自动往返控制线路的构思自动往返的实现应采用具有行程功能的行程开关作为检测元件以实现控制。
SQl、SQ2的作用:自动换接电动机正反转控制电路,实现台车的自动往返行程控制;SQ3、SQ4的作用:被用来作终端保护,以防止SQ1、SQ2失灵,台车越过限定位置而造成事故。
行程开关SQ1的常闭触头串接在正转电路中,把另一行程开关SQ2的常闭触头串接在反转电路中。
当台车运动到所限位置时,其挡铁碰撞位置开关,使其触头动作,自动换接电动机正反转控制电路。
控制线路中的SB1和SB2分别作正转启动按钮和反转启动按钮。
自动往返控制线路
二、自动往返控制线路的工作原理分析
(a)自动往返控制线路工作原理示意图1
(b)自动往返控制线路工作原理示意图2
(c)自动往返控制线路工作原理示意图3
自动往返控制线路的工作原理示意图(a)工作原理示意图1 (b)工作原理示意图2 (c)工作原理示意图3
自动往返控制线路的工作原理分析:
停止时:。
湖南省技工学校
实习教学教案
教师姓名:
.
接触器CJ10-20 20A、线圈电压380V 2 KM1
KM2
FR 热继电器JR16-20/3 三极、20AA 1
SQ1~SQ4 位置开关JLXK1-111 单轮旋转式 4
SB1~SB3 按钮LA10-3H 保护式、按钮数3 1
XT 端子板JD0-1020 380V、10A、20节 1
主电路导线mm2(7*) 若干
1 mm
2 (7*) 若干
控制电路导
线
按钮线0.75 mm2若干
接地线 1.5 mm2若干
控制板500mm*400mm*20mm 1 ¸…
1. 自动循环控制线路,如图10—1所示
图10—1 工作台自动往返行程控制线路
2..线路工作原理
.
先合上QS.
→电动机M正转→工作台左移→至限定位置挡铁1碰SQ1→
→工作台右移(SQ1触头复位)→至限定位置挡铁2碰SQ2→
→→工作台又左移(SQ2触头复位)→→······以后重复上述过程,工作台就在限定的行程内自动往返运动
.
.
.
.
.。
1.位置控制线路(又称行程控制或限位控制线路)图1-59 位置控制电路图图1-60 LX19系列行程开关 图1-61 行程开关的符号在图1-59所示的右下角是行车运动示意图,在行车运行路线的两头终点处各安装的一个电器SQ1和SQ2叫做行程开关,如图1-60所示是LX19系列行程开关的外形图,行程开关的符号如图1-61所示。
SQ1和SQ2的常闭触头分别串接在正转控制电路和反转控制电路中。
当安装在行车前后的挡铁1或挡铁2撞击行程开关的滚轮时,行程开关的常闭触头分断,切断控制电路,使行车自动停止。
可见,位置控制就是利用生产机械运动部件上的挡铁与行程开关碰撞,使行程开关的触头动作,来接通或断开电路,以实现对生产机械运动部件的位置或行程的自动控制。
过移动行程开关的安装位置来调节。
滚轮想一想:当行车上的挡铁撞击行程开关使其停止向前运行后,这时再按下启动按钮SB1,线路会不会接通使行车继续前行?为什么?2.行程开关行程开关又称限位开关,是一种利用生产机械某些运动部件的碰撞来发出控制指令的主令电器。
主要用于控制生产机械的运动方向、速度、行程大小或位置,是一种自动控制电器。
行程开关的作用原理与按钮相同,区别在于它不是靠手指的按压使其触头动作,而是利用生产机械运动部件的碰压使其触头动作,从而将机械信号转变为电信号,使运动机械按一定的位置或行程实现自动停止、反向运动、变速运动或自动往返运动。
(1)结构及工作原理机床中常用的行程开关有LX19和JLXK1等系列,各系列行程开关的基本结构大体相同,都是由操作机构、触头系统和外壳组成,如图1-62所示。
以某种行程开关元件为基础,装置不同的操作机构,可得到各种不同形式的行程开关,常见的有按钮式(直动式)和旋转式(滚轮式)。
JLXK1系列行程开关的外形如图1-63所示。
图1-62 JLXK1型行程开关的结构和动作原理a)按钮式 b) 单轮旋转式 c) 双轮旋转式图1-63 JLXK1系列行程开关操作机构触头系统外壳想一想:把行程开关与按钮在线路中的作用比较一下,能找出它们有哪些异同吗?JLXK1系列行程开关的动作原理如图1-62b所示。
课题四位置控制与自动往返控制线路(总9页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除邢台技师学院教师课时授课计划图一三、线路的工作原理如下:首先合上电源开关QS1、行车向前运动:KM1 联锁触头分断对KM2联锁按下SB2 KM1线圈得电 KM1主触头闭合电动机M启动连续正转KM1自锁触头闭合自锁行车前移移至限定位置,挡铁1碰撞SQ1 SQ1常闭触头分断KM自锁触头分断五、元件布置图如下(图二):图二六、示范操作:在安装板上进行走线工艺示范操作:主要示范转角和集中走线及如何走线无交叉。
七、巡回指导在学生动手操作时,要检查学生实习位置、操作姿势、操作方法及工具的佩带是否正确,安全文明生产和元器件质量、数量等是否正确,如有不正确应及时纠正。
如发现个别错误,认真做好个别指导、如大多数有错误集中指导,及时发现优秀生,培养典型学生榜样,以榜样增强说服力,要在短时间内搞好全班学生实习的信心,为下一步实习打下良好基础。
自动往返控制线路一、提问:1、请同学们想一想能否在位置控制线路图的基础上,作一些改进来实现自动循环控制?2、可用位置开关的常闭触头来实现工作台指定位置停车,那么再反向起动时又如何控制呢?3、位置开关有两对触头,一对常开触头和一对常闭触头,常闭触头先分断,常开触头后闭合,应如何来实现工作台的自动往返运动?3 0’二、电路特点:自动往返控制电路图如下,工厂车间里的铣床常采用这种线路,行车运动示意图同位置控制示意图相同,行车的两头终点处各安装了二个位置开关SQ1、SQ3和SQ2、SQ4,将这两个位置开关SQ1、SQ3的常闭触头分别串接在正转控制电路中,将另两个位置开关SQ2、SQ4的常闭触头分别串接在反转控制电路中,将SQ2常开与按钮SB2的常开触头及接触器KM1的常开自锁触头并联接在正转电路中,将SQ1常开与按钮SB3的常开触头及接触器KM2的常开自锁触头并联接在反转电路中。
安装与检修交流电动机位置控制与自动往返控制线路任务说明:为了使电动机的正反转控制与工作台的左右运动相配合,在控制线路中设置了四个位置开关SQl、SQ2、SQ3和SQ4,并把它们安装在工作台需限位的地方。
其中SQl、SQ2被用来自动换接电动机正反转控制电路,实现工作台的自动往返行程控制;SQ3、SQ4被用来作终端保护,以防止SQl、SQ2失灵,工作台越过限定位置而造成事故。
在工作台边的T形槽中装有两块挡铁,挡铁1只能和SQl、SQ3相碰撞,挡铁2只能和SQ2、SQ4相碰撞。
当工作台运动到所限位置时,挡铁碰撞位置开关,使其触头动作,自动换接电动机正反转控制电路,通过机械传动机构使工作台自动往返运动。
工作台行程可通过移动挡铁位置来调节,拉开两块挡铁间的距离,行程就短,反之则长。
任务要求:1、系统有SB1、SB2、SB3按钮,其中两个作为正、反得的启动按钮,一个作为停止按钮。
2、系统要有L1正转指示灯和L2反转指示灯。
3、要用完整的继电保护装置。
4、画出电器原理图。
5、画出元器件安装位置图并在上绘制接线图。
6、三相异步电动机型号为Y112M—4,4kW、380V、8.8A、△接法、1 440r/min7、给出元器件明细表。
8、按图施工。
引导问题:1、限位/行程开关的作用是什么?画出符号。
2、通常限/行程位开关控制触头有哪些?3、对于频繁启动或正反转的电机如何选择熔断器的熔体,写出公示。
4、根据电动机铭牌上的数据如何选择热继电器?5、热继电器的整定值和额定值的区别?6、如何设置热继电器的整定值?7、根据电动机铭牌选择横切面积2.5平方毫米铝芯线是否合适?如果是1平方毫米铜芯线呢?。