《航海学》船舶定位课件2_7船位误差理论共84页文档
- 格式:ppt
- 大小:8.57 MB
- 文档页数:84
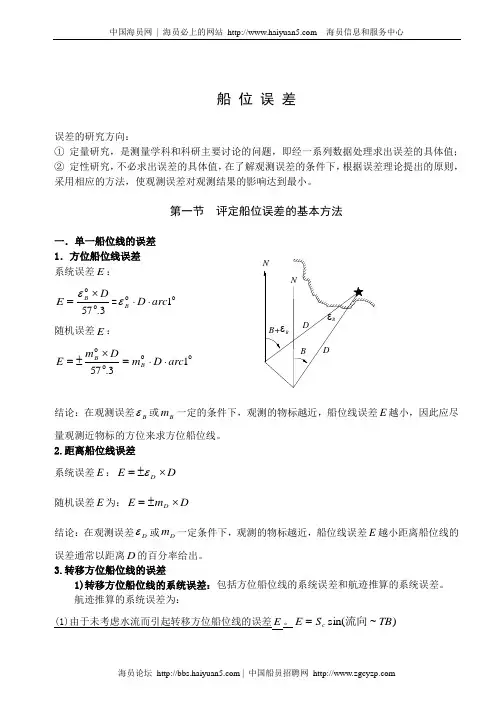
船 位 误 差误差的研究方向:① 定量研究,是测量学科和科研主要讨论的问题,即经一系列数据处理求出误差的具体值;② 定性研究,不必求出误差的具体值,在了解观测误差的条件下,根据误差理论提出的原则,采用相应的方法,使观测误差对观测结果的影响达到最小。
第一节 评定船位误差的基本方法一.单一船位线的误差 1.方位船位线误差 系统误差E :=E 3.57 DB⨯ε=1arc D B ⋅⋅ε随机误差E :13.57arc D m D m E B B ⋅⋅=⨯±=结论:在观测误差B ε或B m 一定的条件下,观测的物标越近,船位线误差E 越小,因此应尽量观测近物标的方位来求方位船位线。
2.距离船位线误差系统误差E :D E D ⨯±=ε 随机误差E 为:D m E D ⨯±=结论:在观测误差D ε或D m 一定条件下,观测的物标越近,船位线误差E 越小距离船位线的误差通常以距离D 的百分率给出。
3.转移方位船位线的误差1)转移方位船位线的系统误差:包括方位船位线的系统误差和航迹推算的系统误差。
航迹推算的系统误差为:(1)由于未考虑水流而引起转移方位船位线的误差。
)~sin(TB S c 流向=结论:当转移船位线的方位TB 与流向平行时E =0,误差最小,垂直时,E =c S 误差最大。
移线的时间间隔越短,c S 越小,则E 越小,在航海实际工作中该项E 属于未定系统误差。
(2)由推算航向的误差C ε引起转移船位线的误差E :Q arc S Q S E c c cos 1cos 3.57εε==Q =TB -TC ,移线期间的航程为S 。
结论:当Q =90°时,误差E 最小。
(3)由推算航程的误差S ε引起转移船位线的误差EQ E s sin ε=结论:当Q =0°时,误差E 最小。
2)转移方位船位线的随机误差转移方位船位线的随机误差包括转移前船位线的标准差B m 和转移期间的推算误差ρ:22ρ+±=B m E4.距离差船位线误差距离差船位线的随机误差为:2csc 22csc 081.0γγd t m m E ∆∆±=±= t m ∆——时差的标准差(μs );d m ∆——距离差的标准差(′);γ——船对基线的张角。
第一篇航海学地文航海航海学是一门研究船舶如何安全、经济地从一个港口(地点)航行到另一港口(地点)的实用性学科。
航海学主要研究下列课题:1.拟定一条安全、经济的航线和制定一个切实可行的航行计划。
2.航迹推算,包括航迹绘算和航迹计算两种方法。
航迹推算是指根据船上最基本的航海仪器(罗经和计程仪)所指示的航向和航程,结合海区内的风流要素和船舶操纵要素,不借助外界物标或航标,从某一已知船位起,推算出具有一定精度的航迹和某一时刻的船位的方法。
它是驾驶员在任何情况下,求取任何时刻的船位的最基本的方法,也是陆标定位、天文定位和电子定位的基础。
3.测定船位(简称定位),包括陆标定位、天文定位和电子定位三种。
陆标定位是指观测海图上标有准确位置的,并可供目视或雷达观测的山头、岛屿、岬角、灯塔等显著的固定物标与本船的某一(某些)相对位置关系,如方位、距离和方位差等,从而在海图上确定本船船位的方法和过程。
陆标定位一般可分为方位定位、距离定位、方位距离定位和移线定位等。
天文定位是指在海上利用航海六分仪观测天体(太阳、月亮和部分星体)高度来确定船舶位置的一种定位方法。
电子定位是指利用船舶所装备的无线电定位系统的接收机来测定本船位置的一种定位方法。
目前,普遍使用的有GPS定位系统和罗兰C定位系统。
船舶航行中,要求航海人员尽一切可能随时确定本船的船位所在。
这样,才可能结合海图,了解船舶周围的航行条件,及时采取适当、有效的航行方法和必要的航行措施,确保船舶安全、经济地航行。
航迹推算和定位是船舶在海上确定船位的两类主要方法。
4.航行方法,研究在各种航海条件下的航行方法,如沿岸航行、狭水道航行和特殊条件下的航行等。
为了研究上述课题,航海学还必须包括航海学基础知识和航路资料等基本内容。
其中,航海学基础知识主要包括坐标、方向和距离,以及海图两大部分内容;航路资料主要包括:潮汐与潮流、航标与《航标表》和航海图书资料等内容。
第一章坐标、方向和距离第一节地球形状和地理坐标一、地球形状航海上船舶和物标的坐标、方向和距离等,都是建立在一定形状的地球表面的,要研究坐标、方向和距离等航海基本问题,必须首先对地球的形状和大小作一定的了解。