交流异步电机转速与电源频率关系
- 格式:doc
- 大小:103.00 KB
- 文档页数:2

电机转速与频率的公式 n=60f/p上式中n ---- 电机的转速(转/分);60 --- 每分钟(秒);f――电源频率(赫芝); p ――电机旋转磁场的极对数。
我国规定标准电源频率为f=50周/秒,所以旋转磁场的转速的大小只与磁极对数有关。
磁极对数多,旋转磁场的转速成就低。
极对数P=1时,旋转磁场的转速 n=3000 ;极对数P=2时,旋转磁场的转速 n=1500 ;极对数P=3时,旋转磁场的转速 n=1000 ;极对数P=4时,旋转磁场的转速 n=750 ;极对数P=5时,旋转磁场的转速 n=600(实际上,由于转差率的存在,电机•实际转速略低于旋转磁场的转速)在变频调速系统中,根据公式n=60f/p可知:改变频率f就可改变转速降低频率打转速就变小:即60 f J / p = n J增加频率T f,转速就加大:即60 f t / p = n T1.极数反映出电动机的同步转速,2极同步转速是3000r/min , 4极同步转速是1500r/min , 6极同步转速是 1000r/min,8 极同步转速是750r/min。
绕组的一来一去才能组成回路,也就是磁极对数,是成对出现的,极就是磁极的意思,这些绕组当通过电流时会产生磁场,相应的就会有磁极。
三相交流电机每组线圈都会产生N、S磁极,每个电机每相含有的磁极个数就是极数。
由于磁极是成对出现的,所以电机有 2、4、6、8……极之分。
2.若三相交流电的频率为50Hz,则合成磁场的同步转速为50r/s,即3000r/min.如果电动机的旋转磁场不止是一对磁极,进一步分析还可以得到同步转速n 与磁场磁极对数p的关系:n=60f/p.f 为频率,单位为 Hz.n的单位为r/min.ns与所接交流电的频率(f)、电机的磁极对数(P)之间有严格的关系ns = f/P在中国,电源频率为 50赫,所以二极电机的同步转速为 3000转/分,四极电机的同步转速为1500转/分,余类推。
三相异步电动机额定转速和同步转速的关系三相异步电动机是由于其简单构造、经济实用和易于维修而被广泛应用于工业领域。
异步电动机是一个旋转磁场的作用下发生转动的电动机,其转速取决于机械负载和电源电压的影响。
异步电动机的额定转速和同步转速之间存在着密切的关系,本文将对其进行探讨。
首先,必须明确异步电动机的额定转速和同步转速的定义。
异步电动机的额定转速指的是电动机在额定工况下运转时的转速,例如在额定电压、额定电流和额定负载等条件下的运行速度。
而同步转速指的是电动机的转速等于旋转磁场周期的整数倍。
对于三相异步电动机来说,同步转速取决于电源频率和电动机的极数。
它可以由以下公式来计算:同步转速(rpm)=120 × 电源频率(Hz)/ 极数例如,对于四极异步电动机,在50 Hz的电源频率下,其同步转速为:同步转速(rpm)= 120 × 50/4 = 1500实际上,异步电动机的转速在额定负载下比同步转速略低。
此时,电动机的转速称为额定转速,通常以转每分钟(rpm)或圆每分(rps)为单位。
异步电动机的额定转速低于其同步转速,这是由于转子的滑差效应。
滑差是指转子转速和旋转磁场速度之间的差异。
当电动机的负荷变化时,滑差会发生变化,导致额定转速的变化。
换句话说,异步电动机的额定转速与其同步转速的差异取决于滑差。
滑差越大,额定转速与同步转速之间的差异就越大。
因此,滑差也是衡量电机运行状态稳定性的一个重要参数。
而电机的负荷变化可以导致滑差的变化,从而影响电机的运行。
如果滑差过大,将会导致电机运行不平稳,甚至出现电机失速的情况,因此需要在设计和运行阶段仔细控制滑差。
综上所述,三相异步电动机的额定转速和同步转速之间存在重要关系,对电机的设计和运行状态都有重要影响。
通过控制滑差的大小和稳定性,可以实现电机的正常运行和高效运转。
最后,在选择电机时需要仔细考虑电源频率和电机的极数,以确保电机的额定转速和同步转速的匹配。

变频器频率与转速的换算公式
变频器频率与转速的换算公式:n=60f/p
其中数字及字母代表的意思为:
1.n——电机的转速(转/分)
2.60——每分钟(秒)
3.f——电源频率(赫兹)
4.p——电机旋转磁场的极对数
转速是做圆周运动的物体单位时间内沿圆周绕圆心转过的圈数(与频率不同)。
常见的转速有额定转速和最大转速等。
扩展资料:
变频器组成
主电路
主电路是为异步电动机提供电压调节和调频电源的功率转换部分。
变频器的主电路一般可分为两类:电压型变频器是将电压源的直流电转换为交流电,直流电路的滤波器是电容。
电流模式是将电流源的直流电转换成交流电的转换器。
直流回路的滤波是电感。
它由三部分组成:将工频电源转换为直流电源的“整流器”,吸收变换器和逆变器产生的电压波动的“平波电路”,以及将直流电源转换为交流电源的“逆变器”。
1.操作电路:将外部转速、转矩等指令与检测电路的电流、电压信号进行比较,确定逆变器的输出电压和频率。
2.电压电流检测电路:将检测电压电流与主电路电位隔离。
3.驱动电路:驱动主电路装置的电路。
它与控制电路隔离,使主电路器件通断。
4.速度检测电路:以安装在异步电动机轴机上的速度检测仪(TG、PLG 等)的信号作为速度信号,送至运行电路,根据指令和运行情况,使电动机按指令速度运行。
5.保护电路:检测主电路的电压和电流。
如出现过载或过电压等异常情况,以防止损坏逆变器和异步电动机。
三相异步电动机的频率
三相异步电动机的频率是指在运行时电源的频率。
我国的电源频率为50Hz。
以2到3相异步电机为例,通电后其定子旋转磁场的转速等于每分钟3000转。
此时,在旋转磁场的转子相对切断定子磁场的磁力线,使转子关闭铝框(通称鼠笼条)产生感应电流,转子铁心产生磁场,被定子旋转磁场吸引旋转,因此转子的旋转条件是切断定子磁场获得电流。
三相是指磁场旋转与电动面转子不同步,磁场比转子提前一定角度。
三相异步电机的工作原理是基于定子旋转磁场(定子绕组内三相电流产生的合成磁场)和转子电流(转子绕组内的电流)的相互作用。
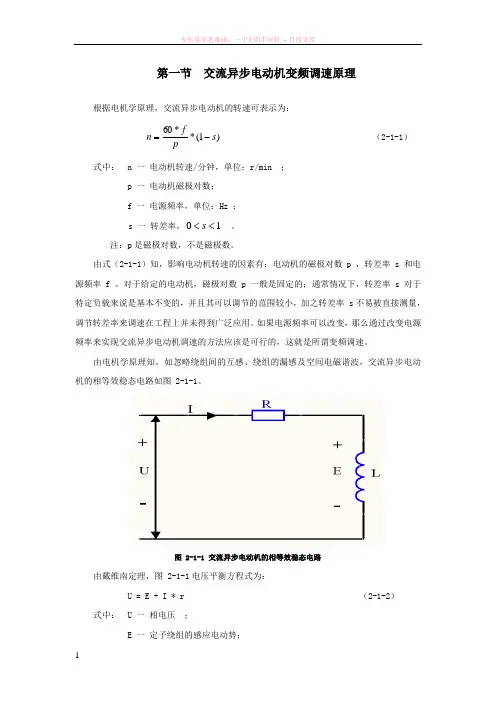
第一节 交流异步电动机变频调速原理根据电机学原理,交流异步电动机的转速可表示为:)1(**60s pf n -= (2-1-1) 式中: n 一 电动机转速/分钟,单位:r/min ;p 一 电动机磁极对数;f 一 电源频率,单位:Hz ;s 一 转差率,10<<s 。
注:p 是磁极对数,不是磁极数。
由式(2-1-1)知,影响电动机转速的因素有:电动机的磁极对数 p ,转差率 s 和电源频率f 。
对于给定的电动机,磁极对数 p 一般是固定的;通常情况下,转差率 s 对于特定负载来说是基本不变的,并且其可以调节的范围较小,加之转差率 s 不易被直接测量,调节转差率来调速在工程上并未得到广泛应用。
如果电源频率可以改变,那么通过改变电源频率来实现交流异步电动机调速的方法应该是可行的,这就是所谓变频调速。
由电机学原理知,如忽略绕组间的互感、绕组的漏感及空间电磁谐波,交流异步电动机的相等效稳态电路如图 2-1-1。
图 2-1-1 交流异步电动机的相等效稳态电路由戴维南定理,图 2-1-1电压平衡方程式为:U = E + I * r (2-1-2)式中: U 一 相电压 ;E 一 定子绕组的感应电动势;I 一 定子绕组的相电流;r 一 定子绕组电阻与转子绕组电阻折算到定子侧的电阻之和。
交流异步电动机的定子绕组的感应电动势是定于绕组切割旋转磁场磁力线的结果, 其有效值计算如下:E = K * f * Φ (2-1-3) 式中:K 一 与电动机结构有关的常数;f 一 电源频率;Φ 一 磁通量 。
由式(2-1-2)知,加在电机绕组端的电源电压U,一部分产生感应电动势E,另一部分消耗在电阻 r ( 定子绕组电阻与转子绕组电阻折算到定子侧的电阻之和 )上 。
其中定子绕组的相电流 I 由两部分构成:21I I I += (2-1-4)电机的定子电流有一小部分1I 用于建立磁场的主磁通,其余大部分2I 用于产生拖动负载的电磁力。
三相异步电动机转速公式
三相异步电动机转速公式为:n=60f/p(1-s) f代表电源频率
P为极对数
n'代表转差率
s代表转差率
三相异步电动机转速是分级的,是由电机的“极数”决定的。
三相异步电动机“极数”是指定子磁场磁极的个数。
定子绕组的连接方式不同,可形成定子磁场的不同极数。
选择电动机的极数是由负荷需要的转速来确定的。
电动机的电流只跟电动机的电压、功率有关系。
三相交流电机每组线圈都会产生N、S磁极,每个电机每相含有的磁极个数就是极数。
由于磁极是成对出现的,所以电机有2、4、6、8……极之分。
在中国,电源频率为50赫,所以二极电机的同步转速为3000转/分,四极电机的同步转速为1500转/分,以此类推。
异步电机转子的转速总是低于或高于其旋转磁场的转速,异步之名由此而来。
异步电机转子转速与旋转磁场转速之差(称为转差)通常在10%以内。
因为如此,所以三相异步电动机的实际转速会比上述的同步转速偏低。
如6的同步转速为1000转,其实际转速一般为960转/分钟。
三相异步电动机转速公式
一、理论推导方法:
1.定义:
假设三相异步电动机的极数为p,即每个相对应的极对数为p/2;
电源的频率为f,旋转磁场的转速为n;
电动机槽数量为N;
2.推导过程:
根据旋转磁场的速度n和极对数p/2,可以得到旋转磁场的角速度ω如下:
ω=2πf/p=2πn/60;
同时,电动机的转速n可以表示为机械角速度的形式:
n=60f/m;
其中,m为电机转子的机械角速度;
将这个公式带入到旋转磁场的角速度中,得到如下等式:
ω=2πn/60=2πf/m=(2πf/N)(N/m);
即N/m为电机转子的极对数;
随后将极对数转换为极数,有p/2=N/m,即可得到与电机转速有关的公式:
n=(120f)/(p);
可见,三相异步电动机的转速与电源的频率和极数有关。
二、实验测量方法:
除了通过理论推导,也可以通过实验测量来得到三相异步电动机的转速公式。
具体的步骤如下:
1.准备工作:
将电动机接上电源,接通电源开关;
连接转速表;
2.测量转速:
打开电机开关,记录下电机的转速;
3.计算极数:
根据转速公式n=(120f)/(p),由于f和n已知,可以通过测量得到的转速n来反推极数p。
综上所述,三相异步电动机的转速公式可以通过理论推导或实验测量得到。
这些公式是计算电动机转速的重要工具,对于电动机的选型和使用具有重要的指导意义。
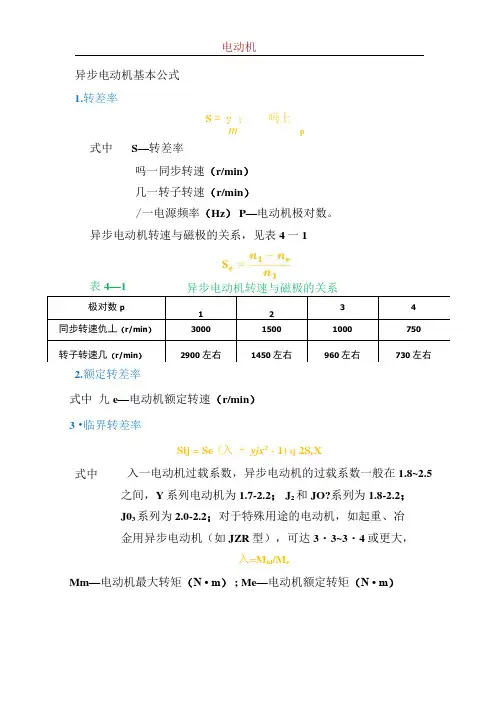
异步电动机基本公式1.转差率S = y ;吗上m p式中S—转差率吗一同步转速(r/min)几一转子转速(r/min)/一电源频率(Hz) P—电动机极对数。
异步电动机转速与磁极的关系,见表4一1式中九e—电动机额定转速(r/min)3 •临界转差率Sij = Se (入+ yjx2-1) q 2S e X入一电动机过载系数,异步电动机的过载系数一般在1.8~2.5之间,Y系列电动机为1.7-2.2; J2和JO?系列为1.8-2.2;J03系列为2.0-2.2;对于特殊用途的电动机,如起重、冶金用异步电动机(如JZR型),可达3・3~3・4或更大,入=M ni/M eMm—电动机最大转矩(N • m) ; Me—电动机额定转矩(N • m)极对数p1 23 4同步转速仇丄(r/min)3000 1500 1000 750 转子转速几(r/min)2900左右1450左右960左右730左右表4—1异步电动机转速与磁极的关系2.额定转差率式中4.电动势方程(1)定子绕组产生的感应电动势Ei = = 4. 44心卩丄人\¥冲4> = BpjS式中E]—定子绕组产生的感应电动势(V)%—降压系数,又称电动势系数,小型电动机可取0.86,中型电动机可取0.90,大型电动机可取0.91;lh—外加电源电压(V)K dpl-定子的绕组系数人一电源频率(Hz)W t一定子绕组每相串联线圈匝数4>一每极磁通(wb)气隙中平均磁通密度(T),它与气隙中最大磁通密度的关系为Bpj = -B s = 0.637B6l ns—每极下的气隙面积(mJ。
最大磁通密度(气隙)可由表4一2中选取,电机容量较大的取较大值:容量较小的取较小值。
Y型电动机为0.57-0.86T;J、JO型电动机的氏值为0.60^0.70T,J2J02型电动机为0.65F75T, 1KW以下电动机为0・40~0・60T。
定子轨部磁通密度B c可由表4—3选取,一般为1.2~1.5T(如2极为1.2-1.7T; 4、6、8极为1.0-1.5T),改极时不应超过1.7T。
异步电机和同步电机的工作原理异步电机和同步电机是常见的电动机类型,它们在工作原理上存在一些差异。
本文将分别介绍异步电机和同步电机的工作原理。
一、异步电机的工作原理异步电机是一种感应电动机,也称为交流感应电动机。
它的工作原理基于电磁感应。
异步电机由定子和转子两部分组成。
定子是由绕组和铁芯构成,绕组通电产生磁场。
转子是由导体条(也称作绕组)和铁芯构成,它的导体条通过电流感应定子磁场,从而产生转矩。
当异步电机通电后,定子产生的磁场会穿透转子,由于转子中的导体条被感应而产生涡流。
涡流会在转子中产生磁场,该磁场与定子磁场相互作用,产生转矩。
由于转子导体条的存在,涡流会引起能量损耗,所以异步电机的效率相对较低。
异步电机的转速是通过频率控制的。
根据电动机的工作原理,转子的转速与定子磁场的旋转速度相同。
而定子磁场的旋转速度与电源的频率有关。
在电源频率不变的情况下,异步电机的转速是基本固定的。
二、同步电机的工作原理同步电机是一种特殊的交流电动机,它的转速与电源的频率同步。
同步电机由转子和定子两部分组成。
转子是由电磁铁和铁芯构成,它通过直流电源通电产生磁场。
定子是由绕组和铁芯构成,绕组通电产生磁场。
当同步电机通电后,转子的磁场与定子的磁场相互作用,产生转矩。
由于同步电机的转速与电源的频率同步,因此转速相对稳定。
同步电机的效率相对较高,因为它没有涡流损耗。
同步电机的转速可以通过调节电源的频率来控制。
当电源频率增加时,同步电机的转速也会增加;当电源频率减小时,同步电机的转速也会减小。
这使得同步电机在一些特定的应用场合中具有优势。
三、异步电机与同步电机的比较异步电机和同步电机在工作原理上存在一些差异。
异步电机的转速是固定的,而同步电机的转速与电源的频率同步。
异步电机的效率相对较低,而同步电机的效率相对较高。
在控制转速方面,异步电机的转速通过频率控制,而同步电机的转速通过调节电源频率来控制。
由于异步电机和同步电机的工作原理不同,它们在应用中有各自的优势。
1、直流电动机,忽略电枢压降,转速 n 与电压U 成正比:n=U/ (Ce*①);电压升高、降低时,电动机的转速交流三相异步电动机: 定子在三相电流作用下会产生一个旋转磁场,旋转磁场的频率与交流电的频率有关, 以标准频率50赫兹计:如果电机是一对磁极, 则旋转磁场频率就是 50 赫兹,即3000转/分;如果电机是二对磁极, 则旋转磁场频率就是 25赫兹,即1500转/分; 如果电机是三对磁极,则旋转磁场频率是50/3赫兹,即1000转/分;而异步电动机转子转速都比旋转磁场转速要小一些, 如旋转磁场转速为 3000转/分,则转子速度一般为2950-2800转/分。
这是由电机结构精度决定。
可见三相异步电动机的转速是由电机磁极对数,交流电频率决定了的。
楼主所说的情况,是电动机处于不正常运行中出现的。
当电动机供电压不足,输入功率不够,而负载又依然超载,造成速度达不到要求时,使转速下降,这时提高电压确实是能提供转速。
他励直流电动机,在电源的电压升高时, 如果其他条件不变, 那么电机的转速会上升, 反之转速降低,因为他励直流电机转速与电枢电压成正比例关系, n=( Un — la*Ra ) / (Ce*①),Un 升高则n 也升高,虽然磁通量也会变化但基本是稳定的,可以忽略弱磁效应的效果不计,转速n 可以认为这时候只受到电压的影响;并励直流电机特性与他励直流电机类似, 论相同;交流异步电机在电源电压降低后, 如果负载情况不变,那么电机的电流会增大,不变转速也会有所降低,这从感应电机降低电压时的人为特性就可以看出来。
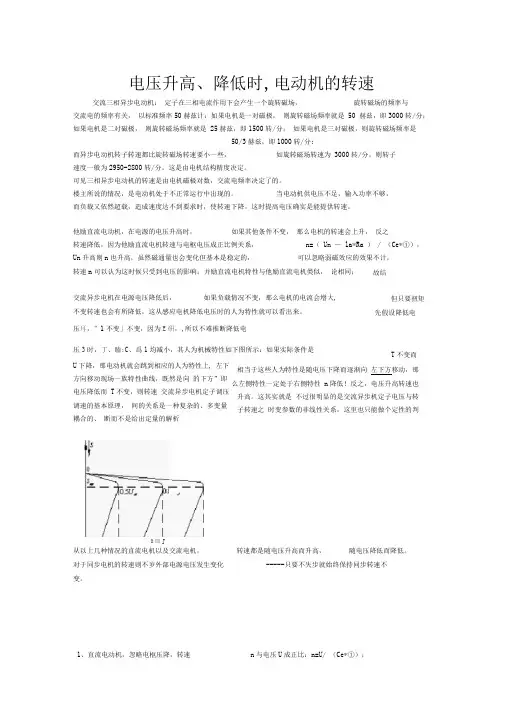
压耳,”1不变」不变,因为E 硏,,所以不难推断降低电压3时,丁、瞌:C 、爲1均减小,其人为机械特性如下图所示:如果实际条件是U 下降,那电动机就会跳到相应的人为特性上, 左下方向移动现场一族特性曲线,既然是向 的下方”即电压降低而 T 不变,则转速 交流异步电机定子调压调速的基本原理, 间的关系是一种复杂的、多变量耦合的、 断而不是给出定量的解析从以上几种情况的直流电机以及交流电机, 转速都是随电压升高而升高, 随电压降低而降低。
异步电机控制原理引言:异步电机是一种常见的电动机类型,广泛应用于工业和家庭设备中。
异步电机的控制原理是通过调节电源频率和电压来实现转速和转矩的控制。
本文将介绍异步电机的控制原理及其应用。
一、异步电机的基本原理异步电机由定子和转子组成。
定子上绕有三相绕组,通过电源提供的三相交流电产生旋转磁场。
转子上的导体感应到旋转磁场后,产生感应电动势,从而在转子上产生电流。
根据洛伦兹力的作用,转子开始旋转,与旋转磁场同步运动。
二、异步电机的控制方式1. 电源频率控制:改变电源频率可以改变异步电机的转速。
通常情况下,电源频率是恒定的,所以这种控制方式的应用较少。
2. 电源电压控制:改变电源电压可以改变异步电机的转矩。
通过调节电源电压,可以实现对异步电机的转矩控制。
这种控制方式常用于需要调节负载转矩的场合,如电梯、起重机等。
3. 变频控制:变频控制是最常用的异步电机控制方式之一。
通过改变电源频率和电压,可以实现对异步电机转速和转矩的精确控制。
变频器是实现变频控制的关键设备,它可以将固定频率的电源电压转换为可调节频率和电压的输出。
三、异步电机控制的应用1. 工业领域:异步电机广泛应用于工业生产线上,如风机、泵、压缩机等。
通过变频控制,可以根据生产需求调整设备的转速和转矩,提高生产效率。
2. 家用电器:异步电机也被广泛应用于家用电器中,如洗衣机、冰箱、空调等。
通过控制电机的转速和转矩,可以实现不同的工作模式和功能。
3. 交通运输:异步电机在交通运输领域也有重要应用,如电动汽车、电动自行车等。
通过控制电机的转速和转矩,可以实现车辆的加速、减速和行驶稳定性控制。
结论:异步电机是一种重要的电动机类型,其控制原理基于调节电源频率和电压。
通过电源频率控制、电源电压控制和变频控制,可以实现对异步电机转速和转矩的精确控制。
异步电机广泛应用于工业、家用电器和交通运输等领域,为各行各业提供了高效、可靠的动力源。
随着科技的不断进步,异步电机控制技术也将不断发展,为各个领域带来更多的创新和便利。
异步电动机旋转磁场的转速与极数
异步电动机的旋转磁场是通过电动机的绕组在电源的作用下产生的,其旋转速度与电动机的极数密切相关。
异步电动机的极数是指转子磁极的数量,通常为2、4、6、8、10等等。
在电动机的运行中,当电源为电动机绕组提供电流时,由于磁场的交变作用,绕组中的磁场也会交替变换,从而产生一个旋转磁场。
该旋转磁场的转速与电源的频率及电动机的极数有关,其转速公式为:
N=60f/p
其中N为旋转磁场的转速,f为电源频率,p为电动机的极数。
由于电源频率是固定的,因此在不同极数的异步电动机中,其旋转磁场的转速也不同。
例如,在50Hz的电源下,一个四极异步电动机的旋转磁场转速为1500rpm,而一个八极异步电动机的旋转磁场转速为750rpm。
因此,对于不同工况下的异步电动机,我们需要根据其极数来确定其旋转磁场的转速,以便进行合理的控制和运行。
- 1 -。
交流异步电机转速与电源频率关系:
n——转速,rpm;
f——电力频率,Hz;
P——电机绕组极数;
s——电机转差率。
P为定值,s基本不变,所以,交流异步电机转速与电源频率成线性关系。
扭矩与输入功率关系:
T——扭矩,Nm;
p——输入功率,kW;
n——电机转速,rpm。
U——电压,V;
I——电流,A。
所以,要保证空压机保持恒转矩,在调低电源频率的同时需要同步调低电源的电压。
专业术语称作:矢量控制技术,或V/f控制。
选择变频器时需要选择VVVF型变频器,即变压变频变频器。
压缩空气管道选型计算:
d——管道内径,m;
v——空气流速,m/s;
——实际气流量,m3/min。
可根据理想气体状态方程计算得出:
——标准状态下的空气流量,m3/min;
——管道内空气的实际温度,K;
——管道内空气的绝对压力,kP;
——标准状态下的空气温度,;
——标准状态下的空气压力,。
压缩空气管道压降计算:
所以原设计所采用的管道尺寸是符合要求的。