现代控制理论 第8章 非线性控制系统分析b
- 格式:ppt
- 大小:1.82 MB
- 文档页数:10
《控制工程基础》电子教案第一章:绪论1.1 课程介绍了解控制工程的概念、内容和研究方法理解控制工程在工程实践中的应用和重要性1.2 控制系统的基本概念定义系统、输入、输出和反馈区分开环系统和闭环系统1.3 控制工程的目标掌握稳定性、线性、非线性和时变性等控制系统的特性学习控制系统的设计方法和步骤第二章:数学基础2.1 线性代数基础掌握向量、矩阵和行列式的基本运算学习线性方程组和特征值、特征向量的求解方法2.2 微积分基础复习极限、连续性和微分、积分的基本概念和方法应用微积分解决实际问题2.3 复数基础了解复数的概念、代数表示法和几何表示法学习复数的运算规则和复数函数的性质第三章:控制系统分析3.1 传递函数定义传递函数的概念和性质学习传递函数的绘制和解析方法3.2 频率响应分析理解频率响应的概念和特点应用频率响应分析方法评估系统的性能3.3 根轨迹分析掌握根轨迹的概念和绘制方法分析根轨迹对系统稳定性的影响第四章:控制系统设计4.1 控制器设计方法学习PID控制器的设计原理和方法了解模糊控制器和神经网络控制器的设计方法4.2 控制器参数调整掌握控制器参数调整的目标和方法应用Ziegler-Nichols方法和频域方法进行参数调整4.3 系统校正和优化理解系统校正的概念和目的学习常用校正方法和优化技术第五章:现代控制理论5.1 状态空间描述了解状态空间的概念和表示方法学习状态空间方程的求解和状态反馈控制5.2 状态估计和最优控制掌握状态估计的概念和方法学习最优控制的目标和求解方法5.3 鲁棒控制和自适应控制理解鲁棒控制的概念和特点了解自适应控制的设计方法和应用场景第六章:线性系统的稳定性分析6.1 稳定性的定义和性质理解系统稳定性的概念和重要性学习稳定性分析的基本方法6.2 劳斯-赫尔维茨准则掌握劳斯-赫尔维茨准则的原理和应用应用劳斯-赫尔维茨准则判断系统的稳定性6.3 李雅普诺夫方法了解李雅普诺夫方法的原理和分类学习李雅普诺夫第一和第二方法判断系统的稳定性第七章:线性系统的控制器设计7.1 控制器设计概述理解控制器设计的目标和重要性学习控制器设计的基本方法7.2 PID控制器设计掌握PID控制器的设计原理和方法应用PID控制器进行系统控制7.3 状态反馈控制器设计了解状态反馈控制器的设计原理和方法学习状态反馈控制器的设计和应用第八章:非线性控制系统分析8.1 非线性系统概述理解非线性系统的概念和特点学习非线性系统分析的基本方法8.2 非线性系统的描述方法学习非线性系统的数学模型和描述方法应用非线性系统分析方法研究系统的性质8.3 非线性控制系统的应用了解非线性控制系统在工程实践中的应用学习非线性控制系统的设计和优化方法第九章:鲁棒控制理论9.1 鲁棒控制概述理解鲁棒控制的概念和重要性学习鲁棒控制的基本方法9.2 鲁棒控制设计方法掌握鲁棒控制设计的原则和方法应用鲁棒控制设计方法设计控制器9.3 鲁棒控制在控制系统中的应用了解鲁棒控制在实际控制系统中的应用学习鲁棒控制在控制系统中的设计和优化方法第十章:控制系统仿真与实验10.1 控制系统仿真概述理解控制系统仿真的概念和重要性学习控制系统仿真的基本方法10.2 MATLAB控制系统仿真掌握MATLAB控制系统仿真工具的使用应用MATLAB进行控制系统仿真和分析10.3 控制系统实验了解控制系统实验的目的和重要性学习控制系统实验的方法和技巧重点和难点解析重点环节1:控制系统的基本概念和特性控制系统的基本概念,包括系统、输入、输出和反馈区分开环系统和闭环系统掌握稳定性、线性、非线性和时变性等控制系统的特性重点环节2:传递函数和频率响应分析传递函数的概念和性质,传递函数的绘制和解析方法频率响应的概念和特点,频率响应分析方法分析根轨迹对系统稳定性的影响重点环节3:控制器设计方法和参数调整控制器设计方法,包括PID控制器、模糊控制器和神经网络控制器的设计原理和方法控制器参数调整的目标和方法,应用Ziegler-Nichols方法和频域方法进行参数调整重点环节4:状态空间描述和最优控制状态空间的概念和表示方法,状态空间方程的求解和状态反馈控制状态估计和最优控制的目标和求解方法重点环节5:非线性控制系统分析和鲁棒控制理论非线性系统的概念和特点,非线性系统分析的基本方法鲁棒控制的概念和重要性,鲁棒控制的基本方法重点环节6:控制系统仿真与实验控制系统仿真的概念和重要性,控制系统仿真的基本方法MATLAB控制系统仿真工具的使用,应用MATLAB进行控制系统仿真和分析控制系统实验的目的和重要性,控制系统实验的方法和技巧全文总结和概括:本教案涵盖了控制工程基础的十个章节,主要包括控制系统的基本概念和特性、传递函数和频率响应分析、控制器设计方法和参数调整、状态空间描述和最优控制、非线性控制系统分析和鲁棒控制理论以及控制系统仿真与实验。
现代控制理论总结第一章:控制系统的状态空间表达式1、状态变量,状态空间与状态轨迹的概念:在描述系统运动的所有变量中,必定可以找到数目最少的一组变量,他们足以描述系统的全部运动,这组变量就称为系统的状态变量。
以状态变量X1,,X2,X3,……X n为坐标轴所构成的n维欧式空间(实数域上的向量空间)称为状态空间。
随着时间的推移,x(t)在状态空间中描绘出一条轨迹,称为状态轨迹。
2、状态空间表达式:状态方程和输出方程合起来构成对一个系统完整的动态描述,称为系统的状态空间表达式。
3、实现问题:由描述系统输入输出关系的运动方程或传递函数建立系统的状态空间表达式,这样的问题称为实现问题单入单出系统传函:W(s)=,实现存在的条件是系统必须满足m<=n,否则是物理不可实现系统最小实现是在所有的实现形式中,其维数最低的实现。
即无零,极点对消的传函的实现。
三种常用最小实现:能控标准型实现,能观标准型实现,并联型实现(约旦型)4、能控标准型实现,能观标准型实现,并联型实现(约旦型)传函无零点系统矩阵A的主对角线上方元素为1,最后一行元素是传函特征多项式系数的负值,其余元素为0,A为友矩阵。
控制矩阵b除最后一个元素是1,其他为0,矩阵A,b具有上述特点的状态空间表达式称为能控标准型。
将b与c矩阵元素互换,另输出矩阵c除第一个元素为1外其他为0,矩阵A,c具有上述特点的状态空间表达式称为能观标准型。
传函有零点见书p17页……..5、建立空间状态表达式的方法:①由结构图建立②有系统分析基里建立③由系统外部描述建立(传函)6、子系统在各种连接时的传函矩阵:设子系统1为子系统2为1)并联:另u1=u2=u,y=y1+y2的系统的状态空间表达式所以系统的传递函数矩阵为:2)串联:由u1=u,u2=y1,y=y2得系统的状态空间表达式为:W(S)=W2(S)W1(S)注意不能写反,应为矩阵乘法不满足交换律3)反馈:系统状态空间表达式:第二章:状态空间表达式的解:1、状态方程解的结构特征:线性系统的一个基本属性是满足叠加原理,把系统同时在初始状态和输入u作用下的状态运动x(t)分解为由初始状态和输入u分别单独作用所产生的运动和的叠加。
《现代控制理论》教案大纲第一章:绪论1.1 课程背景与意义1.2 控制系统的基本概念1.3 控制理论的发展历程1.4 控制理论的应用领域第二章:控制系统数学模型2.1 连续控制系统数学模型2.2 离散控制系统数学模型2.3 状态空间描述2.4 系统矩阵的性质与运算第三章:线性系统的时域分析3.1 系统的稳定性3.2 系统的瞬时性3.3 系统的稳态性能3.4 系统的动态性能第四章:线性系统的频域分析4.1 频率响应的概念4.2 频率响应的性质4.3 系统频率响应的求取方法4.4 系统频域性能指标第五章:线性系统的校正与设计5.1 系统校正的基本概念5.2 常用校正器及其特性5.3 系统校正的方法5.4 系统校正实例分析第六章:非线性控制系统分析6.1 非线性系统的基本概念6.2 非线性系统的数学模型6.3 非线性系统的稳定性分析6.4 非线性系统的控制策略第七章:状态反馈与观测器设计7.1 状态反馈控制的基本原理7.2 状态反馈控制器的设计方法7.3 观测器的设计与分析7.4 状态反馈控制系统应用实例第八章:先进控制策略8.1 鲁棒控制8.2 自适应控制8.3 最优控制8.4 智能控制第九章:最优控制理论9.1 最优控制的基本概念9.2 线性二次调节器(LQR)9.3 离散时间最优控制9.4 最优控制的应用第十章:现代控制理论在工程应用10.1 现代控制理论在自动化领域的应用10.2 现代控制理论在控制中的应用10.3 现代控制理论在航空航天领域的应用10.4 现代控制理论在其他领域的应用第十一章:鲁棒控制理论11.1 鲁棒控制的基本概念11.2 鲁棒控制的设计方法11.3 鲁棒控制的应用实例11.4 鲁棒控制在实际系统中的性能评估第十二章:自适应控制理论12.1 自适应控制的基本概念12.2 自适应控制的设计方法12.3 自适应控制的应用实例12.4 自适应控制在复杂系统中的应用与挑战第十三章:数字控制系统设计13.1 数字控制系统的概述13.2 数字控制器的设计方法13.3 数字控制系统的仿真与实验13.4 数字控制系统在实际应用中的案例分析第十四章:控制系统中的计算机辅助设计14.1 计算机辅助设计的基本概念14.2 控制系统CAD工具与方法14.3 基于软件的控制系统设计与仿真14.4 控制系统CAD在现代工程中的应用案例第十五章:现代控制理论的前沿与发展15.1 现代控制理论的最新研究动态15.2 控制理论与其他领域的交叉融合15.3 未来控制理论的发展趋势15.4 控制理论在解决现实世界问题中的潜力与挑战重点和难点解析本《现代控制理论》教案大纲涵盖了现代控制理论的基本概念、方法与应用,分为十五个章节。
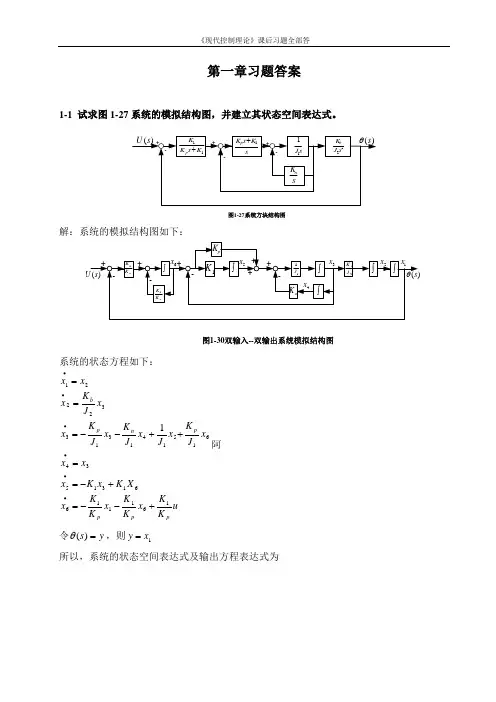
第一章习题答案1-1 试求图1-27系统的模拟结构图,并建立其状态空间表达式。
11K s K K p +sK s K p 1+s J 11sK n 22s J K b -++-+-)(s θ)(s U 图1-27系统方块结构图解:系统的模拟结构图如下:)(s U )(s θ---+++图1-30双输入--双输出系统模拟结构图1K pK K 1pK K 1+++pK n K ⎰⎰⎰11J ⎰2J K b ⎰⎰-1x 2x 3x 4x 5x 6x系统的状态方程如下:u K K x K K x K K x X K x K x x x x J K x J x J K x J K x x J K x x x pp p p n p b1611166131534615141313322211+--=+-==++--===∙∙∙∙∙∙阿令y s =)(θ,则1x y =所以,系统的状态空间表达式及输出方程表达式为[]⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡-----=⎥⎥⎥⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎢⎢⎢⎣⎡∙∙∙∙∙∙654321165432111111112654321000001000000000000010010000000000010x x x x x x y uK K x x x x x x K K K K K K J K J J K J K J K x x x x x x p p pp npb1-2有电路如图1-28所示。
以电压)(t u 为输入量,求以电感中的电流和电容上的电压作为状态变量的状态方程,和以电阻2R 上的电压作为输出量的输出方程。
R1L1R2L2CU---------Uc---------i1i2图1-28 电路图解:由图,令32211,,x u x i x i c ===,输出量22x R y =有电路原理可知:∙∙∙+==+=++3213222231111x C x x x x R x L ux x L x R 既得22213322222131111111111x R y x C x C x x L x L R x u L x L x L R x =+-=+-=+--=∙∙∙写成矢量矩阵形式为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎢⎢⎣⎡----=⎥⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎢⎣⎡32121321222111321000*********x x x R y u L x x x CC L L R L L R x x x 。

非线性控制系统设计和分析一、引言非线性控制系统是一类关于非线性系统的控制理论,具有一定的广泛性和复杂性。
在现代控制理论中,非线性控制系统一直是研究的热点,得到了广泛的应用。
本文旨在探讨非线性控制系统的设计和分析方法,对其进行深入剖析和研究。
二、非线性系统的基本概念1.非线性系统的概念非线性系统指的是一个不满足线性叠加原理的动态系统,即其输入和输出之间的关系不是简单的比例关系。
在现实中的很多系统,如电机、飞行器、化学反应、金融市场等,都是非线性系统。
2.非线性系统的分类按照系统的状态和输入可以将非线性系统分为时变和时不变两类。
按照系统的动态特性可以分为不稳定、稳定和渐进稳定三类。
按照系统的性质可以分为连续和离散两类。
三、非线性系统的数学模型非线性系统的数学模型可以用微分方程、差分方程、偏微分方程等方式表示,采用状态方程、输入-输出方程、状态-输出方程等方式描述。
若系统的动态方程可以表示为:$$\frac{dx}{dt}=f(x,u)$$其中$f(x,u)$是非线性函数,则上式就是非线性系统的微分方程。
四、非线性控制系统的设计方法1.线性化设计法线性化是将非线性动态系统在一个操作点附近,通过Taylor级数展开为线性动态系统。
因此,线性化设计法可以将非线性动态系统的设计问题转化为线性动态系统的设计问题。
线性化方法主要有两种:一是状态反馈线性化法;二是输出反馈线性化法,两种方法可以互相转化。
线性化方法的优点是简单易行,缺点是受到线性化误差的影响。
2.非线性控制设计法非线性控制设计法是基于非线性系统控制理论进行的,包括经典的反馈线性化控制法、滑模控制法、自适应控制法、模糊控制法和神经网络控制法等。
反馈线性化控制法:反馈线性化法是一种将非线性系统转化为线性系统的控制方法,它通过反馈来改变系统的输入来实现控制。
反馈线性化控制法有很好的稳定性和鲁棒性。
滑模控制法:滑模控制法是一种常用的非线性控制方法,具有较好的容错能力和鲁棒性。
《现代控制理论》课程教案第一章:绪论1.1 课程简介介绍《现代控制理论》的课程背景、意义和目的。
解释控制理论在工程、科学和工业领域中的应用。
1.2 控制系统的基本概念定义控制系统的基本术语,如系统、输入、输出、反馈等。
解释开环系统和闭环系统的区别。
1.3 控制理论的发展历程概述控制理论的发展历程,包括经典控制理论和现代控制理论。
介绍一些重要的控制理论家和他们的贡献。
第二章:数学基础2.1 线性代数基础复习向量、矩阵和行列式的基本运算。
介绍矩阵的特殊类型,如单位矩阵、对角矩阵和反对称矩阵。
2.2 微积分基础复习微积分的基本概念,如极限、导数和积分。
介绍微分方程和微分方程的解法。
2.3 复数基础介绍复数的基本概念,如复数代数表示、几何表示和复数运算。
解释复数的极坐标表示和欧拉公式。
第三章:控制系统的基本性质3.1 系统的稳定性定义系统的稳定性,并介绍判断稳定性的方法。
解释李雅普诺夫理论在判断系统稳定性中的应用。
3.2 系统的可控性定义系统的可控性,并介绍判断可控性的方法。
解释可达集和可观集的概念。
3.3 系统的可观性定义系统的可观性,并介绍判断可观性的方法。
解释观测器和状态估计的概念。
第四章:线性系统的控制设计4.1 状态反馈控制介绍状态反馈控制的基本概念和设计方法。
解释状态观测器和状态估计在控制中的应用。
4.2 输出反馈控制介绍输出反馈控制的基本概念和设计方法。
解释输出反馈控制对系统稳定性和性能的影响。
4.3 比例积分微分控制介绍比例积分微分控制的基本概念和设计方法。
解释PID控制在工业控制系统中的应用。
第五章:非线性控制理论简介5.1 非线性系统的特点解释非线性系统的定义和特点。
介绍非线性系统的常见类型和特点。
5.2 非线性控制理论的方法介绍非线性控制理论的基本方法,如反馈线性化和滑模控制。
解释非线性控制理论在实际应用中的挑战和限制。
5.3 案例研究:倒立摆控制介绍倒立摆控制系统的特点和挑战。
解释如何应用非线性控制理论设计倒立摆控制策略。