哈工大机械原理共159页
- 格式:ppt
- 大小:31.58 MB
- 文档页数:159
哈工大机械原理课程设计--棒料输送线布料装置(总20页)-CAL-FENGHAI.-(YICAI)-Company One1-CAL-本页仅作为文档封面,使用请直接删除Harbin Institute of Technology课程设计说明书(论文)课程名称:机械原理设计题目:棒料输送线布料装置(方案1)院系:机电工程学院班级:设计者:学号:1指导教师:王洪祥设计时间:哈尔滨工业大学目录1、题目要求 (4)2.题目解答 (4)(1)工艺动作分析 (4)(2)运动功能分析及运动功能系统图 (5)(3)系统运动方案拟定 (8)(4)系统运动方案设计 (12)1)带传动设计 (12)2)滑移齿轮传动设计 (13)3)齿轮传动设计 (16)4)槽轮机构设计 (17)5)不完全齿轮机构设计 (18)6)执行机构2,3的设计 (19)(5)运动方案执行构件运动时序分析 (20)(6)参考文献 (21)棒料输送线布料装置(方案1)1、题目要求如图下图1所示棒料输送线布料装置的功能简图。
料斗中分别装有直径35mm,长度150mm的钢料和铜料。
在输送线上按照图2所示的规律布置棒料。
原动机转速为1430r/min,每分钟布置棒料50,80,110块分3档可以调节。
图1图22.题目解答(1)工艺动作分析由设计题目和图1可以看出,推动输送带运动的是执行构件1,使钢料下落的是执行构件2,使铜料下落的是执行构件3,这三个构件的运动关系如图3所示。
T1 T1 T1 T1执行构件运动情况执行构件1运动停止运动停止运动停止运动停止执行构件2停止放料停止放料停止停止停止放料执行构件3停止停止停止放料停止停止停止停止T2、T3图3 棒料输送线布料装置运动循环图图3中T1是执行构件1的工作周期,T2是执行构件2的工作周期,T3是执行构件3的工作周期。
由图3可以看出,执行构件1是作间歇转动,执行构件2作间歇转动,执行构件3也作间歇转动,执行构件2和3的工作周期相等,且为执行构件1的3倍。
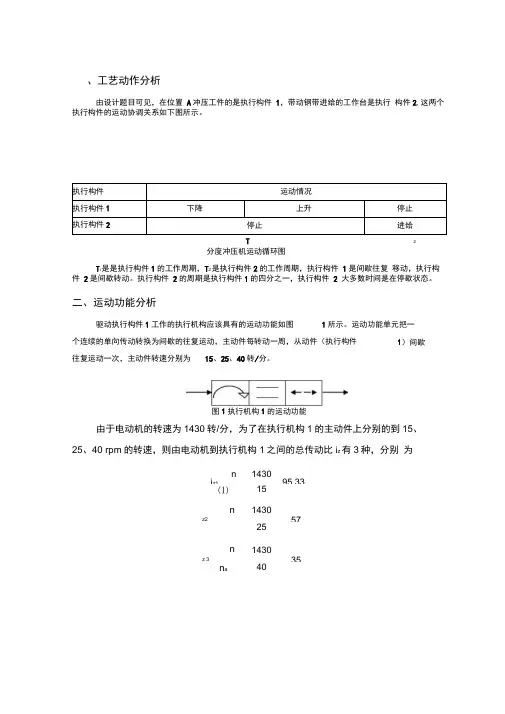
、工艺动作分析由设计题目可见,在位置 A 冲压工件的是执行构件 1,带动钢带进给的工作台是执行 构件2,这两个执行构件的运动协调关系如下图所示。
分度冲压机运动循环图T i 是是执行构件1的工作周期,T 2是执行构件2的工作周期,执行构件 1是间歇往复 移动,执行构件 2是间歇转动。
执行构件 2的周期是执行构件1的四分之一,执行构件 2 大多数时间是在停歇状态。
二、运动功能分析驱动执行构件1工作的执行机构应该具有的运动功能如图1所示。
运动功能单元把一个连续的单向传动转换为间歇的往复运动,主动件每转动一周,从动件(执行构件 往复运动一次,主动件转速分别为15、25、40转/分。
图1执行机构1的运动功能由于电动机的转速为1430转/分,为了在执行机构1的主动件上分别的到15、 25、40 rpm 的转速,则由电动机到执行机构1之间的总传动比i z 有3种,分别 为n1430i z195.33⑴15n1430z257.25n1430z 335.n a40执行构件 运动情况执行构件1 下降上升停止 执行构件2停止进给T21)间歇总传动比由定传动比i c 和变传动比i v 两部分构成,即:i z1 i c i v1 i z2 i c i v2I z3 i c i v33种总传动比中I zi 最大,I z3最小。
由于定传动比I c 是常数,因此,3种变传动比 中I vi 最大,心最小。
采用滑移齿轮变速,其最大传动比最好不大于 4,设定传动 比 I v1=4o图2有级变速运动功能单元为了保证系统过载时不至于损坏,在电动机和传动系统之间加一个过载保护 环节。
过载保护运动功能单元可采用带传动实现, 这样,该运动功能单元不仅具 有过载保护功能还具有减速功能,如图 3所示。
图3过载保护运动功能单元整个传动系统仅靠过载保护运动功能单元不能实现其全部定传动比,因此, 在传动系统中还要另加减速运动功能单元,其减速比为定传动比:I cI zI I v 1 95. 33 4 23. 8325Iv 2Iv 3I v 1I z 1 I c I z 2I c I z 3 I c于是,传动系统的有级变速功能单元如图 I95. 33 20 57. 2 23. 8325 35. 75 23. 83252所示。
机械原理大作业课程名称:机械原理设计题目:直动从动件盘形凸轮机构院系:机电学院班级:完成者:学号:指导教师:设计时间:哈尔滨工业大学题目:如图所示直动从动件盘形凸轮机构,其原始参数见表,据此设计该凸轮机构。
凸轮运动分为五个阶段 1.升程阶段0~5034500010156s h ϕϕϕ⎡⎤⎛⎫⎛⎫⎛⎫⎢⎥=⨯-⨯+⨯ ⎪ ⎪ ⎪ΦΦΦ⎢⎥⎝⎭⎝⎭⎝⎭⎣⎦ 23410000306030h v ωϕϕϕ⎡⎤⎛⎫⎛⎫⎛⎫⎢⎥=⨯-⨯+⨯ ⎪ ⎪ ⎪ΦΦΦΦ⎢⎥⎝⎭⎝⎭⎝⎭⎣⎦ 23212000060180120h a ωϕϕϕ⎡⎤⎛⎫⎛⎫⎛⎫⎢⎥=⨯-⨯+⨯ ⎪ ⎪ ⎪ΦΦΦΦ⎢⎥⎝⎭⎝⎭⎝⎭⎣⎦2.远休止50~1503.回程等加速150~195()20'202sh s h ϕ=--Φ-ΦΦ()10'204s h s ωϕ=--Φ-ΦΦ21'204h v ω=Φ4.回程等减速195~240()2'00'202s h s ϕ=Φ+Φ+Φ-Φ()'100'24s h v ωϕ=-Φ+Φ+Φ-Φ21'204h v ω=-Φ5.近休止240~360其中,Φ 推程运动角sΦ 远休止角 '0Φ 回程运动角使用Matlab实现1.从动件位移%用fi1,fi2,fi3,fi4,fi5代替转角h=20;fio1=5*pi/18;fis=5*pi/9;fio2=pi/2;fi1=0:0.01:fio1;dfi=fi1/fio1;s1=h*(10*(fi1/fio1).^3-15*(fi1/fio1).^4+6*(fi1/fio1).^5); hold onplot(180*fi1/pi,s1);fi2=fio1:0.01:fio1+fis;s2=h;hold onplot(180*fi2/pi,s2);fi3=fio1+fis:0.01:fio1+fis+fio2/2;s3=h-2*h/fio2^2*(fi3-fio1-fis).^2;hold onplot(180*fi3/pi,s3);fi4=fio1+fis+fio2/2:0.001:fio1+fis+fio2;s4=2*h/fio2^2*(fio1+fis+fio2-fi4).^2;hold onplot(180*fi4/pi,s4);fi5=fio1+fis+fio2:0.001:2*pi;s5=0;hold onplot(180*fi5/pi,s5);title('位移');xlabel('φ/度'),ylabel('s/mm');grid onhold off2.从动件速度%用fi1,fi2,fi3,fi4,fi5代替转角%设角速度为1rad/sw=1;h=20;fio1=5*pi/18;fis=5*pi/9;fio2=pi/2;fi1=0:0.01:fio1;dfi=fi1/fio1;v1=h*w/fio1*(30*(fi1/fio1).^2-60*(fi1/fio1).^3+30*(fi1/fio1).^4); hold onplot(180*fi1/pi,v1);fi2=fio1:0.01:fio1+fis;v2=0;hold onplot(180*fi2/pi,v2);fi3=fio1+fis:0.01:fio1+fis+fio2/2;v3=-4*h*w/fio2^2*(fi3-fio1-fis);hold onplot(180*fi3/pi,v3);fi4=fio1+fis+fio2/2:0.001:fio1+fis+fio2; v4=-4*h*w/fio2^2*(fio1+fis+fio2-fi4); hold onplot(180*fi4/pi,v4);fi5=fio1+fis+fio2:0.001:2*pi;v5=0;hold onplot(180*fi5/pi,v5);title('速度');xlabel('φ/度'),ylabel('v/(mm/s)');grid onhold off3.从动件加速度%用fi1,fi2,fi3,fi4,fi5代替转角%设角速度为1rad/sw=1;h=20;fio1=5*pi/18;fis=5*pi/9;fio2=pi/2;fi1=0:0.01:fio1;dfi=fi1/fio1;a1=h*w^2/fio1*(60*(fi1/fio1)-180*(fi1/fio1).^2+120*(fi1/fio1).^3) ;hold onplot(180*fi1/pi,a1);fi2=fio1:0.01:fio1+fis;a2=0;hold onplot(180*fi2/pi,a2);fi3=fio1+fis:0.01:fio1+fis+fio2/2;a3=-4*h*w/fio2^2;hold onplot(180*fi3/pi,a3);fi4=fio1+fis+fio2/2:0.001:fio1+fis+fio2;a4=4*h*w/fio2^2;hold onplot(180*fi4/pi,a4);fi5=fio1+fis+fio2:0.001:2*pi;a5=0;hold onplot(180*fi5/pi,a5);title('加速度');xlabel('φ/度'),ylabel('v/(mm/s^2)');grid onhold off4.sdsdϕ-线图%用fi1,fi2,fi3,fi4,fi5代替转角h=20;fio1=5*pi/18;fis=5*pi/9;fio2=pi/2;fi1=0:0.01:fio1;s1=h*(10*(fi1/fio1).^3-15*(fi1/fio1).^4+6*(fi1/fio1).^5);ds1=h*(3*10*(fi1/fio1).^2/fio1-4*15*(fi1/fio1).^3/fio1+5*6*(fi1/f io1).^4/fio1);hold onplot(ds1,s1);fi2=fio1:0.01:fio1+fis;s2=h+0*fi2;ds2=0*fi2;hold onplot(ds2,s2);fi3=fio1+fis:0.01:fio1+fis+fio2/2;s3=h-2*h/fio2^2*(fi3-fio1-fis).^2;ds3=-2*h/fio2^2*2*(fi3-fio1-fis);hold onplot(ds3,s3);fi4=fio1+fis+fio2/2:0.001:fio1+fis+fio2; s4=2*h/fio2^2*(fio1+fis+fio2-fi4).^2; ds4=-2*h/fio2^2*2*(fio1+fis+fio2-fi4); hold on plot(ds4,s4);fi5=fio1+fis+fio2:0.001:2*pi; s5=0+0*fi5; ds5=0*fi5; hold on plot(ds5,s5); title('ds/d φ-s');xlabel('ds/d φ(mm/rad)'),ylabel('s(mm)'); grid on hold off5.凸轮轴心位置的确定凸轮压力角的正切值s s e d ds +-=0/tan ϕα,右侧为升程,作与s 轴夹6π角等于升程许用压力角的切界线t t d D ,则在直线上或其下方取凸轮轴心时,可使[]αα≤,同理右侧回程,作与s 轴夹角等于回程许用压力角3π的切界线''t t d D ,则在直线上或其下方取凸轮轴心时,可使[]αα≤。

H a r b i n I n s t i t u t e o f T e c h n o l o g y机械原理大作业二课程名称:机械原理设计题目: 凸轮机构设计院系:班级:设计者:学号:指导教师:哈尔滨工业大学一、设计题目如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数,据此设计该凸轮机构。
凸轮机构原始参数序号升程(mm)升程运动角升程运动规律升程许用压力角27130150正弦加速度30°回程运动角回程运动规律回程许用压力角远休止角近休止角100°余弦加速度60°30°80°二. 凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图凸轮推杆升程运动方程:)]512sin(2156[130s ϕππϕ-= )512sin(4.374)]512cos(1[156v 211ϕπϕπωω=-=a% t 表示转角,s 表示位移t=0:0.01:5*pi/6;%升程阶段s= [(6*t)/(5*pi )- 1/(2*pi )*sin(12*t/5)]*130; hold on plot(t ,s ); t= 5*pi/6:0。
01:pi; %远休止阶段s=130; hold on plot(t,s );t=pi :0.01:14*pi/9;%回程阶段s=65*[1+cos(9*(t-pi )/5)]; hold on plot(t ,s );t=14*pi/9:0.01:2*pi ;s=0;hold onplot(t,s);grid onhold off%t表示转角,令ω1=1t=0:0。
01:5*pi/6;%升程阶段v=156*1*[1-cos(12*t/5)]/pi hold onplot(t,v);t= 5*pi/6:0。
01:pi;v=0hold onplot(t,v);t=pi:0.01:14*pi/9;%回程阶段v=—117*1*sin(9*(t—pi)/5) hold onplot(t,v);t=14*pi/9:0。
此文档仅供收集于网络,如有侵权请联系网站删除Harbin Institute of Technology机械原理大作业二课程名称:机械原理设计题目:凸轮结构设计院系:机电工程学院班级:设计者:学号:指导教师:设计时间:哈尔滨工业大学1、设计题目序号 升程(mm ) 升程运动角(︒) 升程运动规律 升程许用压力角(︒) 回程运动角(︒) 回程运动规律 回程许用压力角(︒) 远休止角(︒) 近休止角(︒) 350150正弦加速度40100余弦加速度6030802、凸轮机构推杆升程、回程运动方程,推杆位移、速度、加速度线图。
(1)推杆各行程运动方程(设定角速度为s s rad /2/1πω==)①从动件推程运动方程(650πϕ≤≤)⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=ϕφππφϕ002sin 21h s ⎥⎦⎤⎢⎣⎡⎪⎪⎭⎫ ⎝⎛-=ϕφπφω0012cos 1h v ; ⎪⎪⎭⎫⎝⎛=ϕφπφωπ020212sin 2h a代入数据,可得:⎪⎭⎫ ⎝⎛-=ϕππϕ4.2sin 215650s mm()ϕ4.2cos -1120=v s mm /ϕπ4.2sin 576=a 2/s mm②从动件远休程运动方程(πϕπ≤≤65) 0;50===a v mm s③从动件回程运动方程(914πϕπ≤≤) ()[]⎭⎬⎫⎩⎨⎧+-+=s h s φφϕφπ0'0cos 12()[]s h v φφϕφπφωπ+--=0'0'01sin 2 ()[]s h a φφϕφπφωπ+--=0'0'212cos 22代入数据,可得:()[]πϕ8.18.1cos 125-+=s mm ()πϕπ8.18.1sin 90--=v s mm / ()πϕπ8.18.1cos 3242--=a 2/s mm④从动件进休程运动方程(πϕπ2914≤≤) 0===a v s(2)、推杆位移、速度、加速度线图①推杆的位移线图如下②推杆的速度线图如下③推杆的加速度线图如下3、凸轮机构的ds s-线图,并依次确定凸轮的基圆半径和偏dϕ距凸轮机构的s d ds-ϕ线图如下图所示由图中范围选定点(-10,-50)为凸轮转轴O 点,则mm r 99.501050220=+=取基圆半径为r 0 =51mm ,偏距e = 10mm 。
第1章平面机构的结构分析1.l基本要求1.掌握组成机构的零件、构件、运动副、运动链及机构的基本概念和联系。
掌握运动副的常用类型及特点。
2.掌握常用机构构件和运动副的简图符号及机构运动简图的绘制方法。
3.掌握机构自由度的意义和机构具有确定运动的条件;掌握平面机构自由度的计算公式并正确识别出机构中存在的复合铰链、局部自由度和虚约束,并作出正确处理。
4.掌握机构的组成原理和结构分析方法,重点掌握用基本杆组机构进行机构的结构分析。
1.2 内容提要一、本章重点本章的重点是有关机构组成中的构件、运动副、运动链及机构等概念;机构具有确定运动的条件,机构运动简图的绘制和平面机构自由度的计算;机构的组成分析和机构的级别判别。
1.机构组成的基本概念及机构具有确定运动的条件构件是机构运动的单元体,是组成机构的基本要素。
而零件是制造的单元体。
实际的构件可以是一个零件也可以是由若干个零件固联在一起的组成的一个独立运动的整体,是机构运动的单元体。
运动副是由两构件直接接触而又能产生一定相对运动的可动联接。
也是组成机构的又一基本要素。
把两构件参与接触而构成运动副的部分称为运动副元素。
运动副可按其接触形式分为高副(即点或线接触的运动副)和低副(面接触的运动副)。
又可按所能产生相对运动的形式分为转动副、移动副、螺旋副及球面副等等。
由于两构件构成运动副之后,它们之间能产生何种相对运动是决定于该运动副所引人约束情况,所以运动副常根据其所引入约束的数目分类为Ⅰ级副,Ⅱ级副,Ⅲ级副,Ⅳ级副,Ⅴ级副。
见表1-1运动链是两个或两个以上构件通过运动副联接而构成的相对可动的系统。
如果运动链中构件构成首末封闭的系统,则称为闭式链,否则称为开式链。
如果将运动链中的一个构件固定作为参考系,则这种运动链就成为机构。
机构从其功能来理解是一种用来传递运动和力的可动装置。
从机器的特征来看,机构是具有相对运动规律的构件组合。
而从机构组成来看,机构是具有固定构件的运动键。